
Abstract
Soil–plant–atmosphere models and certain land surface models usually require information about the ability of soils to store and release water. Thus, a critical soil parameter for such reservoir-like models is the available water capacity (AWC), which is usually recognized as the most influential parameter when modeling water transfer. AWC does not have a single definition despite its wide use by scientists in research models, by regional managers as land-management tools and by farmers as decision-aid tools. Methods used to estimate AWC are also diverse, including laboratory measurements of soil samples, field monitoring, use of pedotransfer functions, and inverse modeling of soil-vegetation models. However, the resulting estimates differ and, depending on the method and scale, may have high uncertainty. Here, we review the many definitions of AWC, as well as soil and soil–plant approaches used to estimate it from local to larger spatial scales. We focus especially on the limits and uncertainties of each method. We demonstrate that in soil science, AWC represents a capacity—the size of the water reservoir that plants can use—whereas in agronomy, it represents an ability—the quantity of water that a plant can withdraw from the soil. We claim that the two approaches should be hybridized to improve the definitions and estimates of AWC. We also recommend future directions: (i) adapt pedotransfer functions to provide information about plants, (ii) integrate newly available information from soil mapping in spatial inverse-modeling applications, and (iii) integrate model-inversion results into methods for digital soil mapping.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Content
1. Introduction
2. The capacity of soil to store and release water: definitions and concepts
2.1 Concepts related to AWC and transpirable soil water content
2.1.1 Historical and current concepts related to AWC
2.1.2 Extractable or transpirable soil water content
2.1.3 AWC: Available water content or available water capacity?
2.2 Two characteristic points of water content used to estimate AWC
2.2.1 Field capacity
2.2.2 Permanent wilting point
2.2.3 Wilting point or permanent wilting point?
2.3 The depth used to estimate AWC: soil depth or rooting depth?
2.3.1 Estimating soil depth
2.3.2 Estimating rooting depth
2.4 AWC in heterogeneous soils: how to address rock-fragment content and pedological heterogeneities
2.5 Limits of this review: non-limiting water range and saline soils
3. Estimating AWC from a soil viewpoint: current approaches and their limits
3.1 Estimating local AWC components
3.1.1 Estimating AWC components from laboratory measurements of soil samples
3.1.2 Estimation of AWC components from in situ soil water content monitoring
3.1.3 Estimating AWC components by inverting soil models
3.2 Spatial estimation of AWC from the field scale to the regional scale
3.2.1 Using geophysics to estimate AWC at the field scale
3.2.2 Using pedotransfer functions to estimate AWC
3.2.3 Conventional soil mapping techniques applied to AWC
3.2.4 Digital soil mapping applied to AWC
4. Estimating AWC from an agronomic viewpoint: incorporating the influence of plants in experimental and inverse-modeling approaches
4.1 Using a soil-plant approach to estimate AWC
4.1.1 The plant in soil-plant hydric functioning
4.1.2 Field monitoring of soil water content in a vegetated soil and estimation of PWP water content
4.1.3 Including remotely sensed vegetation data to estimate AWC or its components
4.2 Inverting soil-plant models to estimate AWC
4.2.1 Models and data used in inverse-modeling approaches
4.2.2 Local or spatial model inversion
4.2.3 Errors and uncertainties in AWC estimated by inverse modeling
4.2.4 Limits of using inverse modeling to estimate AWC components
5. Comparing and reconciling soil approaches and soil-plant approaches
5.1 Comparing approaches for estimating AWC components
5.1.1 Different types and numbers of AWC components can be estimated
5.1.2 The spatial support can differ between the different AWC measurements and the inversion
5.1.3 Differences in descriptions of soil-water transfer and the soil
5.1.4 Differences in the temporal validity of AWC in soil or soil-plant approaches
5.1.5 Costs of input and external data, knowledge level and processing time: suggestions for choosing a compromise
5.1.6 The quality of the estimated AWC
5.2 Combining soil and soil-plant approaches to improve AWC estimates
5.2.1 Improving soil-based estimates of AWC using inverse-modeling information or information about plants
5.2.2 Using soil information to improve inverse-modeling estimates of the AWC-equivalent parameter
5.2.3 Improving spatial estimates of AWC over large regions
6. Conclusion: toward new definitions of AWC?
7. Declarations
8. References
1 Introduction
At the interface between the atmosphere and geosphere, soils play an essential role in ecosystem services. They are reservoirs that store fresh water and control how much water is available to plants (i.e., “green water”) (Schyns et al. 2015). Characterizing them at local and regional scales is critical for understanding crop-environment interactions (e.g., Folberth et al. 2016).
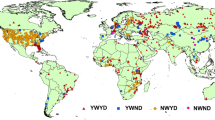
In tools such as SWAT (Soil & Water Assessment Tool) and in crop models, water balance in the soil–plant system is often modeled using a reservoir-type representation of the soil, whose hydraulic properties are described by the available water capacity (AWC). These models can range from complex representations of plant growth and soil water balance to more simplified models for end-users. In both cases, AWC theoretically represents the maximum quantity of water available for plant growth, as defined by Veihmeyer and Hendrickson (1927). It is thus an integrated value determined over the entire soil thickness, from water content at field capacity (FC) to that at the permanent wilting point (PWP). These two water content limits are empirical concepts and may have different meanings and values depending on the discipline (e.g., soil, plant or climate science). Along with AWC, the literature describes other concepts: soil scientists may use “water holding capacity” or “soil holding capacity” (Lebon et al. 2003), “soil water reservoir” (Ratliff et al. (1983) or “soil water availability” (Brillante et al. 2016), while agronomists and forest scientists may use “apparent available water content” (Cabelguenne and Debaeke 1998), “relative available soil water” (Zhang et al. 2015), “plant available water capacity” (Jiang et al. 2007), “root zone available water capacity” (Lo et al. 2017), or “transpirable or extractable soil water” (Klein et al. 2014). The number of articles that mention these keywords continues to increase (Fig. 1), which emphasizes the need to clarify these concepts.

Dynamics of publications recorded in the WOS (Web of Science, questioned 28th July 2019) about the available water capacity, field capacity and wilting point concepts. The requests are: For AWC and related concepts : TOPIC = (“plant available water” or “soil available water” or “soil holding capacity” or “extractable soil water” or “transpirable soil water”). For field capacity: TOPIC = “field capacity”. For wilting point TOPIC = “wilting point”.
AWC is considered the most influential parameter in watershed or irrigation models (Barker et al. 2018; Shivhare et al. 2018). AWC is also a main source of uncertainty in outputs of land-surface and crop models (Dewaele et al. 2017; Eitzinger et al. 2004), especially when used over large regions in the context of climate change (Wang et al. 2018).
Many methods to estimate AWC have been developed: a soil-based approach by soil scientists, and a soil–plant-based approach by agronomists (Fig. 2). Both approaches have limits, and a combined approach would help to analyze advantages and limitations of different methods and to develop new strategies to estimate AWC.

Examples of different approaches for estimating available water capacity (AWC) at different scales: a Soil-based approach with local measurements (photo UMR EMMAH). b Indirect estimation at field scale of AWC combining geophysics and soil types characterization (reproduced from Seger et al. 2016). c Plant-based approach using crop growth estimation and status (normalized difference vegetation index—NDVI images here) combined with variation in soil water or inversion of crop models to estimate AWC.
In this review, we (i) describe and develop the concepts related to AWC and its components, (ii) present the methods used to estimate AWC using soil-based and soil–plant-based approaches, and (iii) after a critical analysis of each approach, provide insights for developing improved methods to estimate AWC that are relevant for a given spatial scale and with the data available. At each stage, we focus specifically on limitations of the methods and uncertainties in the estimates.
2 The capacity of soil to store and release water: definitions and concepts
2.1 Concepts related to AWC and transpirable soil water content
2.1.1 Historical and current concepts related to AWC
The AWC concept describes the soil as a “bucket” that contains soil water between an upper limit, FC, and a lower limit, PWP. This original definition of AWC of Veihmeyer and Hendrickson (1927, 1931) is included in the current definition of the INSPIRE Directive (http://inspire.ec.europa.eu/codelist/SoilDerivedObjectParameterNameValue/availableWaterCapacity): “the amount of water that a soil can store that is available for use by plants, based on a potential rooting depth. It is the water held between field capacity and the wilting point, adjusted downward for rock fragments and for salts in solution.” AWC was initially defined as total available water (TAW). To avoid confusion, we do not use this term. The AWC is thus the water quantity summed over horizons of the soil profile down to rooting depth:
where maxDepth is the maximum soil depth or rooting depth, ΔZ is the horizon thickness, and i is the number of soil horizons.
AWC is usually expressed in cm3 cm−3, but can also be expressed in g g−1 or mm cm−1. It can be determined from laboratory measurements and, under certain conditions discussed later, from field measurements.
In the definition of Veihmeyer and Hendrickson (1927), AWC is a plant-oriented parameter that defines the capacity of a soil to store water that can be extracted by plant roots. Consequently, maxDepth (Eq. 1) is the rooting depth. However, the rooting depth varies because it depends on the plant species or genotype and the stage of plant development. Some authors, especially those who map soils, consider that maxDepth refers to total soil depth. Unfortunately, the definition of the INSPIRE Directive does not clear up the ambiguity because it introduces the concept of “potential rooting depth.” We discuss this challenging issue related to depth in detail later (Section 2.3).
2.1.2 Extractable or transpirable soil water content
Monitoring of water content in the field indicates that plants may take up less (rarely more) water than the AWC measured in laboratory experiments (Cabelguenne and Debaeke 1998; Ritchie 1981). Based on Ritchie (1981), some authors defined the plant available water capacity (PAWC), (total) extractable soil water content, or (total) transpirable soil water (TTSW) content as the difference between the field-measured drained upper limit—equal to FC—and a “(crop) lower limit” (CLL). Sinclair and Ludlow (1986) defined the latter limit as the “soil water content when transpiration of the drought-stressed plants decreased to 10% or less of that of well-watered plants.” This limit can be reached during dry years or by depriving the soil of water (e.g., using rain shelters; Burk and Dalgliesh (2013)). By monitoring water content in the field, some authors defined a part of this TTSW as the fraction of transpirable soil water (FTSW), which is commonly used in irrigation or drought studies (Abreu et al. 2015; Bindi et al. 2005; Casadebaig et al. 2008; Gaudin and Gary 2012; Lebon et al. 2003; Zhang et al. 2015). It is a relevant parameter for assessing the hydric functioning of the soil–plant system, especially for plants whose rooting depth is difficult to estimate (e.g., trees). TTSW and FTSW always refer to field measurements and are always associated with both a soil and a plant. Because this lower limit is not always the same as PWP, TTSW is not the same as AWC (Section 2.2.2).
2.1.3 AWC: available water content or available water capacity?
Based on historical and current definitions, AWC is conceptualized as the maximum quantity of water that soil, considered as a bucket, can theoretically store which is a capacity. It differs from the quantity of water that is actually stored at any one time, which is the content. Since AWC was first defined, confusion between “capacity” and “content” remains in the acronym; both are widely used in the literature and are rarely defined precisely. This confusion is maintained by that between AWC and TTSW; for the latter, field monitoring provides the soil water content. In the sections that follow, AWC refers to “available water capacity.”
2.2 Two characteristic points of water content used to estimate AWC
2.2.1 Field capacity
In many handbooks dealing with AWC, the current definition of water content at FC, which has not changed since first defined, corresponds to the soil water content after rapid drainage, linked to dominance of gravity over capillary forces, has ceased (Briggs and MacLane 1910; Ottoni et al. 2014; Veihmeyer and Hendrickson 1927). FC water content thus corresponds to the maximum amount of water that a soil can store, which is assumed to be available to plants. Over temporal scales of plant growth, and depending on the climate, plants capture only a small amount of the water contained in the porosity drained by gravity (McDonnell 2014), but this assumption is debated (de Jong van Lier 2017; Logsdon 2019). FC is thus related to a physical process—gravity drainage—and should not vary among crops for a given type of soil, as demonstrated by Ratliff et al. (1983).
Veihmeyer and Hendrickson (1931) stated that FC is reached when the change in water content “reaches a negligible flow.” The Soil Science Society of America (1984) considers 2–3 days for drainage to become negligible when determining FC; however, some authors suggested different durations: 2–12 days (Ratliff et al. 1983), 50–450 h (Jabro et al. 2009), a few hours to several months due to hydraulic conductivity and the climatic demand (Assouline and Or 2014), 6–24 h for coarse textured soils (Cassel and Sweeney 1974) and several weeks for fine textured soils (Davidson et al. 1969). Some authors recommend defining FC based on dynamics of the soil water content. While Ratliff et al. (1983) recommend that the change in soil water content should be 0.1–0.2% vol. per day at FC, Assouline and Or (2014) demonstrated that no standard change can be found in the literature. These criteria, based either on a duration after the end of rainfall or irrigation, or water content dynamics, are controversial; thus, some authors recommend setting FC as a given matric potential. Colman (1947) recommended a value of – 33 kPa, which has remained a reference value since then (Nachabe 1998); however, several authors recommended different values: − 20 kPa (Salter and Haworth 1961), − 10 kPa (Romano and Santini 2002), − 5 kPa (Nemes et al. 2011), and – 6 kPa (Toth et al. 2015). Assouline and Or (2014) demonstrated that soil texture influences this value strongly. However, − 10 kPa or the original – 33 kPa value are the most common values currently found throughout the literature to describe FC.
The water content at FC depends strongly on soil characteristics, especially soil texture and structure. This is visible, for example, when examining volumetric water contents estimated from measurements of undisturbed soil aggregates equilibrated at – 10 kPa, from the UNSODA database (Nemes et al. 2001) and the EU-HYDI database (Weynants et al. 2013) (Fig. 3a), which gather mostly soils from temperate climate (see Table 1, Nemes et al. 2001). The − 10 kPa FC water contents differ strongly within and among texture classes, with a mean of 0.14 (± 0.07) cm3 cm−3 for sandy soils and 0.44 (± 0.08) cm3 cm−3 for clayey soils. Other reference values, including the influence of structure expressed by the bulk density, can be found in articles that address point pedotransfer functions (PTFs) (e.g., Al Majou et al. 2008).

Water content at – 10 kPa (a) and – 1500 kPa (b), determined on undisturbed soil samples using different laboratory protocols (mainly measurements on plate apparatus), according to the USDA textural classes. The data are collected from the UNSODA database and EU-HYDI database in which recordings without any information about the method or about the texture have been removed.
2.2.2 Permanent wilting point
The original definition of PWP, for plants in pots, is the water content which induces a plant water deficit that results in leaf wilt that cannot reversed when the plant is placed in a water-saturated atmosphere (Briggs and Shantz 1912). PWP represents the inability of roots to extract water from soil with low water content, which induces wilting. This biological definition of PWP has been refined over time by defining standardized situations and conditions (Furr and Reeve 1945; Taylor et al. 1934). However, PWP is also influenced by the soil/root profile, plant stage, transpiration rate, and osmotic adjustment, which resulted in recognizing that PWP is not a single value but one that may vary within a certain range (Taylor et al. 1934). This biological estimate of PWP is relatively laborious and time consuming. It was replaced with a water content at a fixed matric potential, as earlier scientists found that soil type influenced PWP more than environmental variables such as potential evapotranspiration (Briggs and Shantz 1911; Briggs and Shantz 1912; Taylor et al. 1934; Veihmeyer and Hendrickson 1948). Richards et al. (1949), Richards and Weaver (1943, 1944), and Sykes (1964) showed that PWP determined from plant experiments yielded matric potentials of − 10 to − 20 bars (− 1000 to − 2000 kPa), with a mean of − 15 bars (− 1500 kPa). As wilting can occur due to plant or soil conditions, depending on the thermodynamic equilibrium of the soil–plant system (Czyz and Dexter 2012), the water content at − 1500 kPa is widely used as the operational estimate of PWP, at least for annual crops in temperate climates (Ratliff et al. 1983). Some authors (e.g., Toth et al. 2015) also used a matric potential of − 1580 or − 1600 kPa, but due to the steepness of the retention curve at these potentials, their water content differs little from that at – 1500 kPa; in any case, the logarithm of PWP is always ca. 4.2. Nevertheless, the matric potential at PWP can vary greatly among plant species, ranging from as low as − 16,000 to – 3500 kPa for xerophilic species to higher than – 1000 kPa for hydrophilic species (Gobat et al. 2004). The water content at – 1500 kPa can thus differ from that “at the lowest limit in the field,” as used in the definition of TTSW (Ratliff et al. 1983). The amount of water released at potentials lower than – 1500 kPa are however generally low.
To aggregate cumulative effects on crop water uptake related to soil water and its dynamics, aeration, but also mechanical resistance due to soil type and crop management, some authors introduced the concept of “least limiting water range” (daSilva and Kay 1997; Leao et al. 2006). This concept should not be confused with the PWP.
Using a reference potential of – 1500 kPa provides average ranges of PWP water content, which varies from 0.05 (± 0.04) cm3 cm−3 for sandy soil to 0.28 (± 0.07) cm3 cm−3 for clayey soil (Fig. 3b). Other reference potentials can be found in articles that address pedotransfer functions (e.g., Al Majou et al. 2008; Toth et al. 2015).
2.2.3 Wilting point or permanent wilting point?
From a plant-use viewpoint, not all the water stored in AWC is equally available to plants for uptake. This fact was strongly debated in the 1950s between initial findings of Veihmeyer and Hendrickson (1927, 1948) and experiments of Richards and Wadleigh (1952): the latter showed that plants begin to wilt and restrict their growth well before the soil water content reaches PWP. Many experiments that followed demonstrated that Richards and Wadleigh’s view was accurate. When the matric potential in soil falls below a certain value, a plant’s stomata begin to close to prevent dehydration, and transpiration decreases below maximum transpiration (determined by the climate and plant stage). The soil water content, at which the ratio of actual evapotranspiration to maximum evapotranspiration falls below one, is called the temporary wilting point (TWP), and the water content between FC and the TWP is called readily available water (Brisson et al. 1992). It defines the amount of soil water necessary for the plant to avoid suffering from a water deficit. TWP water content depends strongly on the species considered, its resistance to drought, and the amount of potential evapotranspiration (Allen et al. 1998). Some irrigation decision tools use the readily available water content in order to trigger irrigation when water content falls below it.
2.3 The depth used to estimate AWC: soil depth or rooting depth?
As mentioned, maxDepth (Eq. 1) is a key factor in soil AWC estimation, but it remains difficult to define and estimate. In its original definition, AWC defines two properties: (i) the ability of soil to store water and (ii) the capacity of plants to collect water from this soil water stock. Depth can mean the maximum soil depth or the rooting depth, depending on the objective of using the AWC concept and the relative importance of these two aspects in the definition. Thus, ambiguity remains about which depth to use when estimating AWC. The term “maximum soil depth” itself can be misleading when (i) roots colonize the saprolite layers located between the bottom of the soil and the bedrock (e.g., vineyard, forest) and (ii) a soil horizon becomes an obstacle to roots.
2.3.1 Estimating soil depth
Many studies have defined AWC for a given soil, regardless of the crop. Consequently, maxDepth (Eq. 1) was considered the soil depth or maximum soil depth. Specifications of the GlobalSoilMap program (Arrouays et al. 2014) considered “depth to the bedrock” (i.e., either “hard” bedrock—an indurated or cemented layer—or “soft” bedrock that meets the consistency requirements for paralithic contact (Soil Survey Division Staff 1993)). This depth represents the “potential rooting depth” mentioned by the INSPIRE Directive that considers potential rooting in saprolite layers and obstacles caused by certain soil layers.
In addition to these definition issues, soil depth remains difficult to estimate. The (maximum) soil depth can be underestimated for deep soils if the real soil depth exceeds the maximum observation depth (i.e., “right-censored” soil depth) (Chen et al. 2019).
2.3.2 Estimating rooting depth
If specific crops are considered when estimating AWC, maxDepth should be the rooting depth, as it influences estimates of AWC strongly. For example, given an elementary AWC for 1 cm of soil of 1–2.5 mm cm−1 soil depth, a 10 cm error in rooting depth and a measurement accuracy of water contents at FC and PWP of ca. 0.01 m3 m−3 (as an estimate for laboratory measurement), the total resulting error in AWC over a 100 cm homogeneously rooted soil horizon would range from 17 to 29 mm, of which 58–87% would originate from the 10 cm error in rooting depth.
Despite its relevance for estimating AWC, maximum rooting depth is rarely measured in the field as it is time consuming; thus, it is usually estimated from tabulated values (e.g., Allen et al. 1998). In this case, a range of maximum and minimum values is generally provided, and the difference between them ranges from 0.2 m to more than 1 m depending on the species, as rooting depth varies greatly among cultivars and soil conditions (e.g., water, nutrients). Thus, measuring rooting depth in the field can provide a more accurate estimate of AWC. Unfortunately, no consensus exists on which measurement to use as the rooting depth, such as the deepest visible root or 95% of the cumulative root distribution (Combres et al. 1999). Moreover, although rooting is relatively spatially homogeneous in the upper soil layer, root heterogeneity increases greatly with depth (Hodge et al. 2009; Fig. 4). This heterogeneity can influence water uptake greatly due to the explored soil volume and local variability in soil hydraulic properties (Beudez et al. 2013), and challenges the idea of AWC when roots are assumed to be equally efficient throughout the entire rooting depth. For forest soils, several authors showed that knowing the AWC for some of the rooting depth is sufficient to estimate tree transpiration or growth, even if roots are observed at greater depths (Algayer et al. 2020; Tanaka et al. 2004). Cabelguenne and Debaeke (1998) reported on field experiments in which several annual crops (i.e., maize, sorghum, soybean, sunflower, and wheat) could withdraw all extractable water, even at a matric potential lower than – 1500 kPa in the near-surface layer, whereas not all of the water stored in deeper soil layers was captured, due to lower root density. Droogers et al. (1997) stressed that “the amount of available soil water” should not be confused with “water accessibility” to roots; the latter depends strongly on soil structure and may differ in compacted and uncompacted soils, even in the case, which is theoretically possible depending on the stress value, when they have the same AWC.

Vertical soil profile with root impacts. a Picture of the field setting for examining 2D distribution of root impacts with a grid. b Resulting distribution of root impacts under 3 rows for 82-day-old maize. The horizontal dotted blue line shows the depth of the cumulative 95% of root impacts. (C. Doussan, unpublished results).
The concept of TTSW aggregates differences in the rooting and extraction potential among plant species throughout the rooting depth. TTSW refers to a given crop, in a given soil, and under given climate conditions. Agronomists sometimes use TTSW to quantify water uptake instead of AWC (Pellegrino et al. 2004; Ratliff et al. 1983), but it is applied only at the local scale as it requires data on field water content. The issue of rooting depth remains a challenge for modeling soil–plant functioning over large regions.
2.4 AWC in heterogeneous soils: how to address rock-fragment content and pedological heterogeneities
Some horizons have structural heterogeneities, such as irregular horizon boundaries (e.g., tongues) or rock fragments, that must be considered when estimating AWC. A common practice is to estimate the nominal AWC for each component of the soil horizon and then sum these values for an overall estimate of AWC at the horizon or profile scale.
As a porous medium, rock fragments can store and release water. AWC has the same definition for rock fragments as for fine earth: the difference between water content at FC and PWP. The elementary AWC of a stony horizon (AWChorizon) is thus estimated as follows:
where AWCRockFragment and AWCFineEarth represent the AWC of rock fragments and fine earth, respectively, and w is the volumetric proportion of rock fragments in the horizon.
Tetegan et al. (2011) demonstrated that, depending on their lithological type, sedimentary rock fragments can contribute 2% (for flint) to 60% (for weathered limestone) to the soil horizon AWC. In a case study of a calcareous soil, Cousin et al. (2003) demonstrated that ignoring the rock-fragment content would underestimate annual water percolation by ca. 15%, and that considering their volume but ignoring their hydraulic properties would overestimate annual percolation by 15%. Algayer et al. (2020) observed a significant increase in the correlation between tree growth and AWC when the AWC of rock fragments was included in the estimated AWC of forest soil.
The same may apply to other types of soil heterogeneity. For an Albeluvisol with white silty-loam tongues in a red clay-loam horizon, Frison et al. (2009) demonstrated that PWP water content was lower and FC water content was higher for the white soil volumes than for the red soil volumes. AWC was thus significantly higher in tongues than in the bulk soil horizon, with differences ranging from 0.055 to 0.144 cm3 cm−3. Considering the contribution of tongues to the horizon AWC resulted in AWC of 0.171–0.228 cm3 cm−3, depending on the proportions of white and red soil volumes.
2.5 Limits of this review: non-limiting water range and saline soils
Some authors introduced an alternative and more integrated concept of AWC and TTSW, the “non-limiting water range,” which describes the range of soil water contents in which water, oxygen, and mechanical resistance do not limit plant growth. This concept lies outside the scope of this review. As mentioned in the INSPIRE Directive’s definition of AWC, salt content in the soil solution must be considered as it alters interfacial tensions in the soil porous media and the osmotic conditions under which plants can withdraw water from the soil. Thus, the general concept of AWC cannot be considered valid for saline or sodic soils, which require site-specific studies (e.g., Wang et al. 2011; Abd El-Mageed and Semida 2015). Specifically, current PTFs (Section 3.2.2) lie outside the range for these soil types.
3 Estimating AWC from a soil viewpoint: current approaches and their limits
For decades, soil scientists have determined AWC, FC, and PWP based on the assumption that soil can be described as a vertical succession of soil horizons with different properties, especially hydraulic ones. Laboratory measurements, field monitoring, estimates using PTFs, and soil mapping are thus usually conducted at the horizon scale and summed over the soil profile down to the soil depth and, if the estimate has a spatial dimension, over the soil mapping unit.
3.1 Estimating local AWC components
3.1.1 Estimating AWC components from laboratory measurements of soil samples
AWC is usually estimated from laboratory measurements of disturbed or undisturbed soil samples (ca. 10 cm3 in volume) collected in each soil horizon of the soil profile, and then equilibrated at pre-determined matric potentials using a Richards pressure-plate apparatus (for 5–7 days, according to ISO norm 11274 (2019)). To determine their gravimetric water content, soil samples are weighed (i) immediately after removal from the pressure-plate apparatus, to record their moisture weight, and (ii) after they have been dried at 105 °C for 48 h, to record their dry weight. As mentioned, this usually uses either a value of – 33 kPa determined by Colman (1947) or a value of – 10 kPa assumed to be closer to the matric potential in the field (Bruand et al. 2004). For PWP, the traditional value of − 1500 kPa of Richards and Weaver (1943) is usually used. For laboratory measurements, the terms “field capacity” and “permanent wilting point” are not completely appropriate, as soil samples are not subjected to drainage dynamics or to wilting plants.
Due to the usual hysteretic form of the water retention curve, the water content measured at − 33 or − 10 kPa may depend on the initial water content of the soil sample before it was placed on the pressure plate, and whether a wetting or a drying process was used to obtain equilibrium. The standard procedure according to the ISO 11274 (2019) norm requires sampling undisturbed soil clods near FC to ensure that PWP is measured during drying. To measure FC, the undisturbed clods should be gently re-saturated before they are placed on the pressure plate to ensure that they are also drying. Conversely, due to the pore sizes involved in water retention at PWP, PWP can be measured from disturbed or sieved samples.
Because water contents measured at FC and PWP in the laboratory are based on sample weights, they are first expressed as gravimetric water contents. As traditional estimates of AWC are based on volumetric water contents, however, they usually also require estimating the bulk density. Bulk density can be estimated from the soil samples used to estimate FC and PWP or from direct measurement of soil horizons. The latter is recommended for estimates at the profile scale, especially for stony soil horizons in which the contribution of rock fragments to AWC must be included at the horizon or profile scale.
Uncertainties in measuring AWC in the laboratory are due to (i) uncertainties in the matric potential in the pressure-plate apparatus (which is related to the laboratory’s maintenance protocol), (ii) lack of hydrostatic equilibrium in pressure plate (depending on soil type), (iii) uncertainties in the measured weight as a function of the precision of the scale, and (iv) intrinsic variability in the texture and structure of the soil horizon. Intrinsic variability is expressed by the standard deviation of the gravimetric water content for all of the samples used. For estimates of FC, undisturbed soil samples are more representative than disturbed or sieved soil samples, as they maintained their structure. All types of uncertainties can be considered by providing a mean and standard deviation of water content. For example, in the SOLHYDRO database (Bruand et al. 2004), the mean gravimetric water content at – 33 kPa for clayey soils and sandy soils is 0.22 and 0.07 g g−1, respectively, whereas the mean standard deviation associated with this mean is 0.062 and 0.027 g g−1, respectively. Estimated volumetric water content must include uncertainties in estimated bulk density to estimate the total uncertainty in AWC.
3.1.2 Estimating AWC components from in situ soil water content monitoring
In the field, the water content of soil horizons can be monitored by sensors, such as time-domain reflectometry or neutron probes (Ritchie 1981), from the surface down to the potential rooting depth or a reasonable investigation depth. Ideally, several sensors are installed in each soil horizon to capture its heterogeneity.
For FC, field monitoring must be conducted on bare soil, preferably in winter, to obtain a soil water content high enough to be near the FC and to avoid high evaporation rates (which can even be more limited if the soil is covered) (Ottoni et al. 2014). The objective is to follow dynamics of the water content profile over several drying sequences from an almost saturated state, which occurs after heavy rainfall or irrigation. FC is thus estimated by analyzing the water content time series to obtain a value that does not change by more than 0.1–0.2% vol. in a single day (Ratliff, 1981), which is assumed to represent the transition between fast drainage and a quasi-steady-state of water content. The duration of the monitoring and the frequency of the measurements must be adapted to the texture of the soil horizons, but the transient fast drainage is generally assumed to last 48 h or more (Section 2.2.1). An important point of caution is the potential for ascending water fluxes due to capillary rise when the water table is near the soil surface. These fluxes do not have to be considered when estimating AWC although they contribute to the water supply of plants when they occur, and can lead to a wrong estimation of FC.
Several technical and environmental factors influence the uncertainty in FC estimated from field measurements. First, the uncertainty in measurements using water-content sensors usually varies from ca. 1–4% vol. (Robinson et al. 2008), depending on sensor technology, installation, and calibration; careful calibration, especially for soil bulk density may be needed (Huang et al. 2004). Second, spatial variability in soil texture or structure can introduce as much uncertainty in mean measured values as sensor uncertainty can (Vandervaere et al. 1994), depending on the number of sampling sites and knowledge of the field site. The temporal and spatial distribution of measurements can also introduce biases into the estimation of FC. Measuring for too short a period may miss favorable climatic conditions that lead to FC conditions in the field. The influence of the length of the time series with favorable conditions is also related to the measurement frequency (from hourly logging to weekly or less frequent manual measurements), which must be high enough to determine whether FC has been reached. Estimating FC water content down to the soil depth or the potential rooting depth requires installing and calibrating sensors in each soil horizon. This can be difficult, but is sometimes feasible, in stony soils (Coppola et al. 2013) or when roots colonize cracks in hard horizons or regolith. Finally, the number of measurements to make over the soil profile depends on its structuring. If the succession of soil horizons is not known, water content should be recorded along the entire soil profile (e.g., with probes in tubes) instead of measuring it at a few depths, in order to obtain a realistic vertical average.
PWP is also traditionally estimated from the time series of water content, but in cropped situations (Section 4.1.2), which estimates AWC from a soil–plant viewpoint.
3.1.3 Estimating AWC components by inverting soil models
Inverse modeling has long been an alternative and indirect way of estimating soil hydraulic properties. It has been widely used at the horizon scale using data from experiments on drainage or evaporation in soil column samples (e.g., single or multistep outflow experiments (Vereecken et al. 1997; Vrugt et al. 2001), wind evaporation experiments (Tamari et al. 1993)). It consists of adjusting the parameters of soil-water transfer models to simulate observations of the system (e.g., fluxes, soil water content, matric potential) as accurately as possible. As specific points on the water retention curve, water contents at FC and PWP can then be estimated using inverse modeling, which selects ad hoc matric potentials.
In wind evaporation experiments, Mohrath et al. (1997) demonstrated that inversion can have low error, except when soil samples are layered. Using more recent methods, such as generalized likelihood uncertainty estimation, Yan et al. (2017) highlighted that the quality of inversion depends strongly on the parameters of the inversion method itself (i.e., hyper-parameters). Uncertainties in properties estimated from model inversion may depend on many factors. Their estimation is feasible but their relevance can be questionable and they can hardly be validated. A detailed discussion on this issue is given Section 4.2.3.
3.2 Spatial estimation of AWC from the field scale to the regional scale
The locations of available soil observations and measurements used to estimate AWC in the previous methods represent only a small fraction of total soil cover. Therefore, for most large areas, AWC must be determined at unvisited locations. At the field scale, a geophysical survey can serve as a proxy for the AWC or its components when mapping at high spatial resolution. At larger scales, soil mapping techniques are used that require easily available soil properties (e.g., particle-size distribution, soil thickness) observed at enough locations to be interpolated. For AWC in particular, laboratory and field measurements are too expensive and time consuming to use at a large number of locations. This issue is usually addressed by combining soil mapping techniques with PTFs that relate AWC to basic soil properties (Bouma and van Lanen 1987). These approaches are detailed below.
3.2.1 Using geophysics to estimate AWC at the field scale
Agricultural geophysics involves measurement techniques based on physical processes to provide information about soil properties. These methods are generally non-invasive and use proximal soil sensors which, when placed on vehicles, can be used to create high-precision soil maps of the field (e.g., Samouelian et al. 2005). The most common geophysical methods that can sense soil down to the rooting depth are resistivity sounding and electromagnetic induction, which map the soil’s electrical conductivity (ECa) or resistivity averaged over different depths. Since the 2000s, an increasing number of studies have used ECa as a proxy for soil texture (often the clay content) and water content (Heil and Schmidhalter 2017) for non-saline soils. Based on this information, FC and PWP water contents, as well as AWC, can be estimated in several ways. In some cases, a map of soil texture is derived from relationships between ECa and soil texture; the latter is then transformed into AWC using PTFs (Section 3.2.2) (Abdu et al. 2008; Fortes et al. 2015) (Fig. 5). When ECa correlates well with soil parameters (especially texture and soil depth), ECa mapping can be used to delineate homogeneous zones of soil functioning or contrasting soil types. These zones can generate an optimized sampling scheme for estimating AWC (Genere et al. 2015), and a single AWC from laboratory measurements can be used for each zone (Hedley and Yule 2009; Ortuani et al. 2016). This also sometimes enables direct regression analyses between ECa and laboratory measurements of FC and PWP water contents (Jiang et al. 2007).

Evaluation of Available Water Capacity (AWC) from electrical resistivity measurements in an agricultural plot in Central France (Villamblain). a Channel 3 of the electrical resistivity prospecting by the ARP device (Dabas, 2009), and locations of sampling for soil characteristics determinations (particle size distribution, organic carbon content, pH, CaCO3 content). b Soil types derived from the electrical resistivity device and the soil characteristics. c Available water capacity (mm) map derived from laboratory measurements of water contents at – 10 kPa and – 1500 kPa in each soil horizon of the soil types. Adapted from Seger et al. (2016).
Due to the high sensitivity of ECa to water content (Besson et al. 2010), some authors suggest using ECa as a proxy for water content only at FC. AWC maps are thus produced using a mixed approach that includes field estimates of FC and laboratory estimates of PWP (Hezarjaribi and Sourell 2007; Lo et al. 2017). In several studies, the R2 of observed site-specific relationships between ECa and AWC or AWC components ranged from 0.20 to 0.80 (Abdu et al. 2008; Fortes et al. 2015; Hedley and Yule 2009; Heil and Schmidhalter 2017; Hezarjaribi and Sourell 2007; Jiang et al. 2007; Ortuani et al. 2016). However, the quality of the relationship may depend on soil depth: for deep soil layers, weak correlations between ECa and AWC components (Ortuani et al. 2016) and inconsistent patterns (Ortega-Blu and Molina-Roco 2016) have been observed. This can be due to (i) the date of measurement (dry or wet season), which can enhance or blur the relationship, depending on soil type; (ii) the relationship between the depth and sensitivity of the geophysical method; or (iii) the vertical arrangement of soil horizons.
Gooley et al. (2014) and Priori et al. (2019) suggested adding gamma-ray spectroscopy to ECa measurements to map AWC at the plot scale. Viscarra Rossel et al. (2017) developed a comprehensive integrated soil core sensing system that included a gamma-ray densitometer and digital cameras in the visible to near-infrared spectrum to estimate several soil characteristics, including AWC, rapidly. In all of these approaches, however, errors in estimated AWC or FC and PWP water contents still need to be estimated (Gooley et al. 2014).
In addition to using proximal data from geophysical tools, remote-sensing information can be used to estimate AWC. However, as it is used mainly during the growing season, this approach is not considered here as a “soil approach” (Section 4.1.3). Nevertheless, in specific situations without vegetation, remotely sensed data can be used to provide high-resolution information about bare soils and help determine soil characteristics (Gomez et al. 2012; Pasquier et al. 2016; Vaudour et al. 2019). Remotely sensed data can also be used in digital soil mapping (DSM) approaches (Section 3.2.4).
3.2.2 Using pedotransfer functions to estimate AWC
PTFs predict soil properties that are not easily available (e.g., soil water properties) from more readily available soil properties (e.g., particle-size distribution, soil organic carbon content) (Bouma 1989). See the review of Van Looy et al. (2017) for more information about PTFs. Soil water properties are the most important set of PTFs (Pachepsky and Rawls 2004; Wösten et al. 2001), and they are continually improved (e.g., Castellini and Iovino 2019; Szabo et al. 2019; Dharumarajan et al. 2019; Roman Dobarco et al. 2019b). Two main types of PTFs are usually defined: (i) point PTFs, which estimate water content at a given matric potential for a group of soils, and (ii) parametric PTFs, which estimate parameters of a model of the water-retention curve. PTFs are developed using a variety of statistical methods, from linear or nonlinear regressions (e.g., Romano and Palladino 2002) to artificial intelligence (e.g., Haghverdi et al. 2012; Nemes et al. 2006; review of Vereecken et al. (2010)). The best predictors for the water retention curve are those with physical significance related to water retention (Minasny and Hartemink 2011). Texture and particle-size distribution are the most commonly used predictors in PTFs (Jamagne et al. 1977; Rawls et al. 1982), but soil organic carbon content (Arrouays and Jamagne 1993; Batjes 1996) and bulk density (Al Majou et al. 2008; Vereecken et al. 1989) are also frequently used to improve their quality (Vereecken et al. 2010). PTF predictors must be adapted to the target of interest, and should differ when estimating FC and PWP, as different pore sizes are involved in water retention at these two potentials (Tomasella et al. 2003). Thus, specific PTFs have been developed for FC (Ottoni et al. 2014) and for PWP (Czyz and Dexter 2013).
The efficiency of PTFs was first considered by Pachepsky and Rawls (1999), who distinguished accuracy (i.e., the difference between measured and estimated data for the datasets used to develop a PTF) from reliability (i.e., the difference between measured and estimated data for datasets other than those used to develop a PTF). For most published point PTFs, accuracy is provided as the mean and standard deviation of water content for each soil group considered and/or some measure of goodness-of-fit, such as the root mean square error (RMSE). For example, Wösten et al. (2001) and Vereecken et al. (2010) compared the performances of a large set of PTFs and reported respectively an RMSE of 0.02–0.11 m3 m−3 and a mean adjusted RMSE of 0.017 m3 m−3 as measures of accuracy. For parametric PTFs, authors usually provide metrics of reliability, such as mean errors of prediction, root mean square errors of prediction, and/or standard errors of prediction, along with means of AWC or its components.
Regardless of the predictors chosen, some variance remains unexplained by PTFs (Vereecken et al. 2010). The accuracy and reliability of PTFs can be increased first by enlarging the database used to calibrate them. However, it should not generate harmonization problems (e.g., multiple protocols used to measure hydraulic properties, soil predictors and hydraulic properties measured from different samples). While the calibration database is of prime importance, accuracy can increase by stratifying data into different subsets (e.g., by soil type, parent material, horizon depth, or texture group) (e.g., Al Majou et al. 2008).
Good practices for selecting a relevant PTF include choosing a PTF that is (i) published with its uncertainties (Minasny and McBratney 2002); (ii) developed using soils similar to those to which it is applied (Wösten et al. 2001), for example by comparing ranges of their textural characteristics (Minasny and Hartemink 2011; Roman Dobarco et al. 2019b); and (iii) developed at a scale similar to that at which it is applied (Stoorvogel et al. 2019; Van Looy et al. 2017). In addition, sets of PTFs can be used, for example to estimate soil properties over large regions, as recommended by Dai et al. (2019).
3.2.3 Conventional soil mapping techniques applied to AWC
The traditional method for mapping AWC is to use soil maps produced by conventional soil surveys. For the latter, an area is separated into mapping classes, each of which is usually characterized by a representative soil profile or information about the variability in soil properties (i.e., minimum, mean/mode, maximum). Soil properties measured in the representative profiles or represented by modes or means are generally assumed to apply to the entire soil class and entire surface area. Many maps of AWC or its components have been produced using this conventional approach, especially for large spatial extents (e.g., Dejong and Shields 1988; Batjes 2016).
This conventional approach is limited by the precision of soil map delineation, which is related to the map scale. Leenhardt et al. (1994) investigated the precision of predicted AWC and its components estimated from soil maps at three scales (1:10,000, 1:25,000, 1:100,000). AWC estimates were relatively inaccurate regardless of the scale (R2 = 0.40) due to the propagation of uncertainty in soil depth, which was poorly estimated (R2 < 0.20). Although these results were obtained in a specific pedological context and could thus differ from soil maps with different spatial soil structure, they provided insight into the advantages and limitations of such approaches.
Other limitations are due to errors in characterizing soil classes. AWC is usually not measured from representative profiles, but is inferred from PTFs, which results in high uncertainties (Section 3.2.2). AWC is often estimated from small-scale soil maps (1:250,000 and lower) that delineate complex soil mapping units that have more than one soil class. This makes selecting a single representative profile difficult. Aggregation methods are necessary to obtain a single value per mapping unit (e.g., weighted mean, dominant class). However, estimates of AWC at a given location may be irrelevant if this location does not represent the dominant soil class or if the agronomic context is too specific.
3.2.4 Digital soil mapping applied to AWC
DSM was developed in the 1990s as an alternative to conventional soil surveys for mapping soil properties at lower cost (Lagacherie and McBratney 2007; McBratney et al. 2003; Minasny and McBratney 2016). McBratney et al. (2003) developed the equation S = f(s,c,o,r,p,a,n) to summarize the general principle of DSM: a soil property (S) can be predicted using a spatial inference function (f) that uses as input existing soil information (s); spatial covariates that map factors of soil formation, defined by Jenny (1941) (c,o,r,p,a, standing for climate, organisms, relief, parent material, and age, respectively) and geographic location (n), which can highlight spatial trends missed by the other covariates. Many soil-sensing products that estimate soil properties at multiple unvisited sites can also be associated with DSM protocols, such as visible to short-wave-infrared remote sensing (Lagacherie and Gomez 2018), electrical resistivity (Ben-Dor et al. 2009), or electromagnetic induction combined with remotely sensed images (Sommer et al. 2003). Remote-sensing data that assess soil-vegetation-atmosphere functioning could also be useful in DSM approaches (Maynard and Levi 2017; Taylor et al. 2013). Although DSM has as many limitations as conventional soil surveys due to the availability of existing soil information, it has several advantages: (i) it benefits from a wide range of spatial landscape data provided by the spatial data infrastructure; (ii) it can provide local estimates of uncertainty in predictions, which enables realistic use of outputs; and (iii) its outputs can be updated easily to improve precision if new data are collected.
Despite its relevance for users, until 2009, AWC had fewer DSM applications than many other soil properties: only 5 of the 90 DSM articles reviewed by Grunwald (2009) focused on AWC. DSM has been increasing applied to AWC in recent years (Hong et al. 2013; Jin et al. 2018; Levi et al. 2015; Roman Dobarco et al. 2019a; Szabo et al. 2019; Zare et al. 2018), and several articles include pioneer considerations of rooting depth and gravel contents (Leenaars et al. 2018). Styc and Lagacherie (2019) showed that performances of AWC mapping were influenced strongly by the order in which “combining primary soil properties,” “aggregating soil layers across depths,” and “mapping” are executed to provide the targeted AWC.
To date, it has been difficult to determine whether the new DSM techniques predict AWC more accurately than conventional soil mapping, as the literature contains no full validation of AWC predictions, such as that performed by Leenhardt et al. (1994) for conventional soil surveys. However, several estimates of DSM accuracy for AWC components exist, with R2 of ca. 0.20–0.30 for FC and PWP and ca. 0.10–0.40 for soil depth (Hong et al. 2013; Mulder et al. 2016; Roman Dobarco et al. 2019b; Shangguan et al. 2017). Based on analysis of the limitations of using DSM to map soil properties related to AWC, the density of sites with measured soil properties is likely a major limiting factor, and is thus the main factor that influences variation in the accuracy of predictions across case studies (Vaysse and Lagacherie 2015).
4 Estimating AWC from an agronomic viewpoint: incorporating the influence of plants in experimental and inverse-modeling approaches
4.1 Using a soil–plant approach to estimate AWC
4.1.1 The plant in soil–plant hydric functioning
Plants take up water through their root system to meet the climatic demand until the water is too tightly retained by soil particles, which stops transpiration and causes them to start suffering from severe drought, inducing wilting. At this point, as mentioned, the water content should be close to PWP. Consequently, monitoring plant physiological parameters (e.g., transpiration, leaf water potential) over time could reveal soil hydraulic properties and PWP attributes. A decrease in a plant’s relative transpiration or predawn leaf potential indicates that the readily available soil water (Section 2.2.3) is depleted (e.g., Feddes and Raats 2004), while a near zero relative transpiration, or nearly null difference between midday and predawn leaf water potentials, indicates that soil water is close to PWP. Water limitations also influence crop growth (e.g., biomass, leaf area index), and the reduction is related directly to the decrease in relative evapotranspiration and use of soil available water. Vegetation features (e.g., a uniformly managed sunflower field) may reflect soil hydraulic properties and soil depth strongly, especially when exposed to water limitations in the absence of other stresses (Fig. 6).

Effect of available water capacity (AWC) on vegetation growth (sunflower at the Avignon INRA site, France, in 2015). a Four UAV (unmanned aerial vehicle) images of NDVI (normalized difference vegetation index) of a sunflower field exposed to increasing water stress showing the evolution of the vegetation from early growth (sowing was achieved on late May) to senescence (harvest occurred on mid-September), with large within-field heterogeneity; green zone correspond to high NDVI and high level of green leaf area; red zones correspond to low NDVI and low level of green leaf area. b Map of soil electrical resistivity over 0–2 m on the same field as (a) revealing the soil depth heterogeneity; the red zones correspond to high electrical resistivity values for shallow soil depths (80–90 cm); the greener zones correspond to lower electrical resistivity for soil depths deeper than 2 m. Crop heterogeneity appears to be due to AWC heterogeneity, especially soil depth.
4.1.2 Field monitoring of soil water content in a vegetated soil and estimation of PWP water content
Field estimates of PWP water content are based on sensor measurements of the soil profile of a vegetated area, as well as on analysis of the water content time series. PWP is considered to be the lowest water content of cultivated soil after plants have stopped extracting water and are at or near premature death or have become dormant due to water stress (e.g., Ratliff et al. 1983; Kunrath et al. 2015). These conditions can occur in dry seasons without irrigation (Nielsen and Vigil 2018) or depriving soil of water, such as by using rain shelters (Burk and Dalgliesh 2013). Close monitoring is thus needed to detect changes in soil water content, and wilting can be associated with measurements of low transpiration or visual signs of unrecoverable wilting. PWP can become more difficult to estimate, especially in shallow soil or near-surface layers, when soil evaporation is counterbalanced by water supply from deeper soil layers due to capillary rise. Plants can use this ascending water to limit wilting. This process, which is included in the transpirable soil water content and PAWC (Section 2.1.2), is sometimes incorrectly used for PWP water content when field monitoring is involved.
4.1.3 Including remotely sensed vegetation data to estimate AWC or its components
Remotely sensed images of vegetated plots reflect crop development throughout the growing season. Analyses of images of rainfed agricultural areas can be used to estimate AWC, as demonstrated by Araya et al. (2013) using normalized difference vegetation indexes (NDVI) from MODIS images. Remotely sensed data have been used for several decades to estimate AWC or its components directly. See the study of Dewaele et al. (2017) for recent examples.
4.2 Inverting soil–plant models to estimate AWC
Inverse modeling has been used to predict hydraulic properties of soil–plant systems based on the influence of soil hydraulic parameters on plant variables (e.g., growth, transpiration, leaf water potential) (e.g., Hupet et al. 2005; Konrad and Roth-Nebelsick 2011; Sreelash et al. 2017). Comparing soil/crop variables predicted by an adequate model to observations of the same variables can be used to estimate values or probability distributions of certain AWC components from the distance between these predicted and observed values using optimization (Dente et al. 2008; Timlin et al. 2001) or Bayesian methods (Das et al. 2008). A conceptual diagram of model inversion process shows how it can be used to estimate AWC components (Fig. 7).

General description of the model inversion process applied to the estimation of Available Water Capacity (AWC) components.
4.2.1 Models and data used in inverse-modeling approaches
The complexity of models used to estimate AWC depends on their original objectives. Soil-vegetation models inverted to estimate AWC components differ in the detail with which they describe soil-water transfers and plant functioning (Table 1). These characteristics influence their suitability and ease of application for the soil-vegetation system considered.
The observations used in the inversion process are diverse and depend on the field of application, the model used and the spatial scale of interest. A wide variety of observations are used, from field measurements of hydrological or vegetation variables to remote-sensing products (Table 2). In recent decades, several studies used satellite products due to their advantages for spatial applications. Some studies have shown the utility of combining other types of observations of hydraulic properties of the surface and deeper root zone (Charoenhirunyingyos et al. 2011; Sreelash et al. 2012).
The components of AWC that are predicted by inverse soil–plant modeling differ depending on the model used. AWC or FC/PWP water contents can be predicted from models based on the bucket analogy, while the entire soil water retention curve (usually parameterized using the van Genuchten model) can be estimated from models based on the Darcy-Richards equation. Bulk density can also be estimated when FC and PWP are expressed gravimetrically in the inversed model; in practice, however, they are often set at measured or a priori values.
Soil depth or maximum rooting depth is often assumed to be known, and usually only soil hydraulic properties are estimated by the inversion. However, several studies have estimated depth (Irmak et al. 2001; Link et al. 2006; Ridler et al. 2012; Sreelash et al. 2012; Sreelash et al. 2017; Varella et al. 2010a; Varella et al. 2010b). Some authors also estimated root distribution parameters (e.g., Hupet et al. 2003; Schelle et al. 2013).
As mentioned, rock fragments can influence soil hydraulic functioning strongly and thus AWC or its components. To our knowledge, however, inversion of soil–plant models does not consider the influence or properties of rock fragments when estimating AWC.
Describing the complexity of the soil profile in the inversed model is an important issue. The soil can be represented as (i) a single layer (Jhorar et al. 2002), with the estimated soil hydraulic properties thus assumed to represent those of multiple soil horizons, or (ii) multiple layers, which increases the number of parameters to be estimated (e.g., each layer’s thickness and water contents at FC and PWP) (Seki et al. 2015). Some authors showed that, regardless of model complexity, using multiple layers provides better performance than a single homogenous layer, except for soils with low heterogeneity (Schneider et al. 2013; Thomas et al. 2017).
4.2.2 Local or spatial model inversion
Inverse modeling is a natural way to estimate suitable soil parameters at the resolution of the measurements used as input data. It is also considered a powerful method for upscaling (Mohanty 2013; Vrugt et al. 2008). As such, it is a multiscale method. A local inversion (i.e., applied to a single location) estimates AWC components for the spatial (horizontal) support of the observations used. Alternately, a spatial inversion (i.e., applied to a heterogeneous landscape using spatially comprehensive observations of the soil-vegetation system) predicts spatial distribution of AWC components. Spatial inversions can be performed using either a multi-local configuration (i.e., independent inversions of the observed locations) or inversion of a spatial model over the area considered.
Local applications are generally restricted to methodological studies and are performed for well-described experimental sites with many types of data and for specific experiments, such as infiltration experiments (e.g., Russo et al. 1991; Simunek et al. 1998). In comparison, spatial applications for areas of a few hundred m2 to a few km2 can benefit from adequate knowledge of the modeled situation, especially the availability of in situ measurements and prior information, low uncertainty in model inputs, and a model that is adequate for the situations considered. Most applications described in the literature focus on precision agriculture (e.g., Braga and Jones 2004; Florin et al. 2011; Link et al. 2006; Morgan et al. 2003; Timlin et al. 2001). Their objective was to assess variability in soil properties to optimize crop management (e.g., irrigation, fertilization) at the intra-field scale. The authors usually used multi-local crop-model inversion along with observations obtained from in situ yield-monitoring systems with a resolution of a few m2. High spatio-temporal resolution satellites (e.g., Sentinel-1, Sentinel-2) are promising sources of observations for these applications (Ferrant et al. 2016; Yemadje-Lammoglia et al. 2018).
Large-scale applications, mostly based on bucket analogy for soil water, have high uncertainty in model inputs and prior information (Jégo et al. 2015) due to limited access to in situ measurements and less adequate models due to their potentially high variability. For example, satellite data with medium pixel resolution (100–300 m) have been used over areas larger than 100 km2 to provide spatial information about the status of soil and/or vegetation (Coops et al. 2012; Dente et al. 2008).
4.2.3 Errors and uncertainties in AWC estimated by inverse modeling
Relatively few studies directly estimate the error in AWC components predicted by model inversion, instead doing so indirectly for variables of interest simulated by the models, such as soil water content, water fluxes, yield, or leaf area index (e.g., Charoenhirunyingyos et al. 2011; Shin et al. 2013; Singh et al. 2010). As the inversion configurations (i.e., models, observation systems, parameters estimated) often differ among studies, few objective elements are available to analyze and quantify the accuracy of the AWC components estimated by inverting soil–plant models. However, a few studies estimated errors in estimates of AWC components, which ranged from 10 to 18% for FC, 15–20% for PWP, and 10–30% for AWC (Dente et al. 2008; Jégo et al. 2012; Jiang et al. 2008; Morgan et al. 2003; Sreelash et al. 2017; Todoroff et al. 2010).
Model inversion has many sources of uncertainty due to model structure, input data, and the measurements used for inversion. Most inversion methods can consider at least some of these uncertainties and provide information about the uncertainty in the estimated soil parameters (Morgan et al. 2003). For example, Bayesian methods provide a joint posterior distribution, which allows a variety of criteria to be calculated to quantify their uncertainty (e.g., standard deviation, confidence intervals, correlations) (Scharnagl et al. 2011). However, the reliability of the uncertainties calculated may be questionable, as they are often based on assumptions about model and observation errors that are rarely checked due to a lack of information. These criteria should be validated by estimating the percentage of “true” values that fall within the limits of uncertainty (Shrestha and Solomatine 2006). To our knowledge, AWC components estimated from inverse modeling have never been validated in this way, as doing so would require estimating these uncertainties for many sites/pixels (usually several hundred) and relevant measurements of soil properties.
4.2.4 Limits of using inverse modeling to estimate AWC components
Inversion methods can estimate AWC components spatially without requiring heavy in situ measurement systems, but their practical application faces limits that continue to restrict their use. For example, they face the inherent limitation in the ability to solve inverse problems of complex nonlinear models. The complexity of the relationships modeled between inversed observations and estimated AWC components makes it difficult to identify the amount and type of observations required to estimate a given set of components (or, conversely, the set of components that could be estimated from a given amount and type of available observations), with an associated level of uncertainty. The amount of information obtained through inversion to estimate parameters depends on the sensitivity of the observed variables to variations in the model’s parameters. This sensitivity depends strongly on the agro-pedo-climatic context studied (e.g., the occurrence of water stress) (Jhorar et al. 2002; Sreelash et al. 2017; Varella et al. 2010a). The observation system should provide a sufficient level of independent information about the estimated parameters; if not, the inversion often results in equifinality or non-identifiability issues, which increases the uncertainty and interdependence of the estimated parameter (e.g., Jhorar et al. 2002; Ferrant et al. 2016). The small amount of information available without using heavy in situ measurement systems explains why, in general, only a few AWC components are estimated and simplified vertical representations of the soil are often used.
Spatial applications at extents of a few hundred m2 to a few km2 may benefit from knowledge of the modeled situation: availability of in situ measurements, low uncertainty in model inputs, and prior information strongly influenced by errors in observations and in the model. Inversion can automatically compensate for biases in observations or in the model by using non-physical values of the estimated parameters (e.g., Florin et al. 2011; Jiang et al. 2008). Model errors also include structural errors due to processes that the models do not consider but which often influence soil–plant functioning, such as pests, disease, or runoff. They may influence inversion results greatly in certain situations (Jiang et al. 2008). Errors in inverse modeling also include propagation of input errors (e.g., in non-estimated parameter values, initial conditions, forcing), which may be particularly large for applications at a large spatial scale. Ferreyra et al. (2006) showed that high-quality data may be required to invert spatially coupled crop-models, and that using one-dimensional uncoupled models is preferable when the data are of lower quality. This requires a compromise between a realistic model and the need for data, depending on the situation studied.
5 Comparing and reconciling soil approaches and soil–plant approaches
5.1 Comparing approaches for estimating AWC components
As described in the previous sections, the main characteristics of soil- and plant-based approaches for estimating AWC vary. In the Table 3 (described in the following paragraphs), we compare the different approaches to assess the advantages and disadvantages of each.
5.1.1 Different types and numbers of AWC components can be estimated (Table 3(a and c))
Local estimation methods are based on soil profiles and/or augering, which can provide estimates for nearly all AWC components (Table 3(a)). For heterogeneous horizons, laboratory measurements are recommended to estimate AWC rather than using field monitoring. The water content or matric potential measured in situ in stony or glossy horizons vary greatly and would be difficult to interpret from continuous field monitoring due to problems in sensor calibrations, except if gravimetric water content and bulk density can be measured from soil samples frequently collected in situ (Table 3(c1)). As mentioned, the maximum rooting depth is rarely measured in the field; instead, a range of depths is often used (Section 2.3.2).
When considering spatial estimation methods within an agricultural field, a soil depth map may be available, for example from maps of electrical resistivity (Bourennane et al. 2017). Soil depth maps are less common at larger scales, but GlobalSoilMap products include information about depth, along with its associated uncertainty (Arrouays et al. 2014). Depending on the input and external data, however, the variability in rooting depth may be difficult to consider over these areas.
When inverting soil-vegetation models, to improve formulation of the problem and address equifinality issues, the maximum rooting depth is usually assumed to be known and is not included in the set of parameters to be estimated. At the local scale, at which information in addition to the observed data (e.g., soil texture in each horizon) is available, the inversion can estimate each horizon’s FC and PWP water contents, as well as its depth. At larger scales, with less external information, it is difficult to estimate more than the equivalent FC and PWP water contents of a virtual soil layer at a given soil depth. When depth is estimated, the sensitivity of vegetation variables to the maximum rooting depth may be strongly correlated with FC and PWP water contents in the rooting zone and, consequently, the estimated depth and water content are dependent (Varella et al. 2010a). Therefore, accurate prior information about the parameters may avoid estimating inaccurate values.
5.1.2 The spatial support can differ between the different AWC measurements and the inversion (Table 3(b))
Laboratory and field estimates of AWC usually differ (Asgarzadeh et al. 2014), especially for soils with low AWC (Morgan et al. 2001) (Table 3(b)). Volumes of soil on which measurements are made differ and may or may not represent the behavior of the soil horizon. Laboratory measurements are performed on undisturbed soil clods or aggregates of known volume. When the size of the soil aggregate is a representative elementary volume of the soil horizon, laboratory measurements are considered to represent the horizon. Depending on field conditions and the sensor volume of measurements, water content from field monitoring may be difficult to relate to a given horizon. For inverse modeling, the spatial support of estimated AWC components is related to the footprint of the observations used as inputs. Consequently, comparisons of AWC measurements and inversion results should be considered with caution, and validating one method with the other is not always relevant.
5.1.3 Differences in descriptions of soil-water transfer and the soil (Table 3(c2))
The accuracy with which soil-water transfer is represented depends on whether measurement conditions (or model equations, in inverse modeling) represent the reality of water transfer. Representing the physics of water transfer raises two issues: (i) equilibrium vs non-equilibrium approaches and (ii) limits of the bucket analogy.
-
(i)
Equilibrium vs non-equilibrium approaches
To measure AWC in the laboratory, soil samples are brought to a given matric potential in a pressure-plate apparatus, assuming that each sample has a matric potential equilibrium. For matric potential near PWP, however, samples can have such a low hydraulic conductivity that they never equilibrate, even after many days on the plate (Gee et al. 2002). Due to their structure, some pores in the aggregates on the pressure plate may become disconnected from the water-percolation path (i.e., “hydraulic cut-off”; Czyz and Dexter 2012). Evidence of non-equilibrium has been shown by simultaneous measurements with pressure plates and psychrometers, and differences in water content between the two methods can reach 0.1 cm3 cm−3 (Bittelli and Flury 2009; Klein et al. 2006). Laboratory measurements are usually conducted at equilibrium, especially those for matric potentials close to FC. Conversely, the matric potential is rarely fixed in in situ monitoring, and field measurements are usually performed out of matric potential equilibrium.
Because PTFs are usually developed from laboratory measurements, their estimates can be considered to describe soil hydraulic functioning “at equilibrium” (Section 3.2.2). Nevertheless, development of large databases that include data from multiple acquisition methods, such as those of UNSODA or EU-HYDI (Nemes et al. 2001; Weynants et al. 2013), challenges this assertion. PTF users must therefore consider the conditions under which a given PTF should be used. Gribb et al. (2009) used a PTF estimate of soil hydraulic properties to describe dynamics of field soil water content and found little agreement between field data and PTF estimates.
-
(ii)
Limits of the bucket analogy for water fluxes
As expressed in the definition of the INSPIRE Directive, AWC is defined by describing soil horizons as buckets, which can be filled and drained by the downward movement of water from rainfall or irrigation. In many situations, water is available to plants from water ascending from deeper areas of the vadose zone, either capillary rise from more saturated zones or hydraulic lift. In certain hydrological contexts, capillary rise can provide 30–60% of the water needed by crops (Vergnes et al. 2014). Water that is redistributed along the soil profile due to hydraulic lift from deep roots can provide 7% of the water needed by crops (Doussan et al. 2006); however, this contribution remains poorly understood and rarely quantified (Prieto and Ryel 2014). When water flows upward from deep reservoirs, estimating plant available water using “at equilibrium” methods, such as laboratory measurements or traditional PTFs, is inadequate, which challenges the utility of the AWC. Conversely, estimates that use field monitoring data or model inversion consider all water fluxes, upward or downward, and thus can determine relevant parameters for modeling. The latter estimate is not strictly equivalent to the AWC defined by the bucket analogy because it considers all water fluxes and is estimated in an “out-of-equilibrium” state. As it was not defined by modeling, this unnamed AWC-equivalent parameter can be considered equivalent to TTSW. Estimating this unnamed AWC-equivalent parameter over successive seasons could provide a distribution of AWC (and its uncertainty) relevant for a given soil-climate-plant context.
5.1.4 Differences in the temporal variability of AWC in soil or soil–plant approaches (Table 3(c3))
Among AWC components, maxDepth (Eq. 1) is one of the most influential. In a soil-based approach, a maxDepth that represents soil depth can be considered constant over time (Table 3(c3)); consequently, AWC would be stable for several years. Conversely, the AWC-equivalent parameter estimated by inverting a soil–plant model depends strongly on the rooting depth, which is strongly influenced by weather dynamics during a crop’s growing season for a given soil (Table 3(c3)). Multi-annual estimates for a given crop type are recommended to provide a mean value of this parameter, whose annual variation would represent the uncertainty. FC water content can also change over time due to its sensitivity to soil structure, which can vary over short time scales in the surface horizon due to the climate, biological activity (e.g., root activity, animal bioturbation) and human actions (e.g., tillage). Developing temporal PTFs, including predictors of soil structure dynamics, would improve their utility (Van Looy et al. 2017; Vereecken et al. 2010), especially for studies that address climate change and/or changes in land use or management that require long-term modeling.
5.1.5 Costs of input and external data, knowledge level and processing time: suggestions for choosing a compromise (Table 3(d))
Evaluating the feasibility of methods is an important issue. Laboratory measurements are highly time-consuming, as they include digging a soil pit, sampling soil in the field, and performing the measurements themselves, while using remote-sensing data requires less measuring effort, and data are available at high spatial resolution and high temporal frequency due to the development of Sentinel products (Bousbih et al. 2017) (Table 3(d1 to d3)). However, laboratory measurements of AWC provide an independent assessment, with no need for external knowledge or data, and use simple calculations. Conversely, inverse modeling approaches that use remotely sensed information require large amounts of external knowledge and data. Users must be familiar with the model and its parameterization, and must be expert enough to provide relevant values for non-estimated parameters or the a priori information required for inversion.
5.1.6 The quality of the estimated AWC (Table 3(e))
Among the attributes of quality, accuracy is challenging to assess as it requires a reference (Table 3(e1)). Whereas local estimates do not provide AWC estimations over a large extent and with a high precision of spatial variability (Table 3(e2 and e3)), we considered them as the most accurate and compared them to the estimates of other methods for spatial entities characterized well by the local measurements. This characteristic is strongly correlated with spatial attributes (e.g., resolution, extent). Another important attribute of output quality is a representation of an estimate’s uncertainty, regardless of the estimate’s accuracy. For local methods, uncertainty can be assessed by the repeatability of the measurements (laboratory) and by investigating different agro-climatic conditions (soil monitoring) (Table 3e4). For spatial or multiscale methods, assessment depends on the types of input data and statistical processing.
Summarizing the most important characteristics of these approaches highlights their differences (Fig. 8). This comparison also highlights that there is no perfect method for estimating soil AWC and that no method has better qualities than another (Table 3). The advantages and limitations of each method are well known and can be considered by users. Considering that they are complementary to some extent, combining them could improve their performance greatly.

Comparisons between the different methods presented in this paper to evaluate Available Water Capacity (AWC) and related definitions.
5.2 Combining soil and soil–plant approaches to improve AWC estimates
5.2.1 Improving soil-based estimates of AWC using inverse-modeling information or information about plants
As AWC represents the quantity of water available to plants, the main input from inverse modeling of crop or soil–plant system models should be a realistic rooting depth, depending on the soil type and crop. This information should be available at the local scale, for which a variety of accurate information and adequate models can be included in the inversion process. In databases such as GlobalSoilMap products in which AWC is provided for multiple soil depths, users can choose the most appropriate depth for their applications. The next step in developing PTFs for estimating AWC would be to provide information about plants, as suggested by Van Looy et al. (2017). Similar to how class PTFs are usually defined for a texture class, new types of PTFs could be defined for combinations of texture and plant classes. To our knowledge, the first authors to do so were Levi et al. (2015), who introduced remotely sensed information from Landsat to produce functional spatial PTFs for AWC, which differ significantly locally from traditional PTFs. Similarly, Basile et al. (2019) highlighted the effectiveness of NDVI data to estimate PTFs.
5.2.2 Using soil information to improve inverse-modeling estimates of the AWC-equivalent parameter
Improving inverse-modeling estimates of AWC could involve integrating the available information from soil mapping approaches into the inversion process, as shown by Scharnagl et al. (2011) and Scholer et al. (2011). Existing information about soils, which varies according to the context, could be used more widely to constrain inversions by providing direct information about the parameters to be estimated. GlobalSoilMap products could be a particularly relevant source of information in this context as an operational open-access product that provides the associated uncertainties. For spatial applications, such as in hydrology, Finsterle and Kowalsky (2008) and Mariethoz et al. (2010) included a priori information about the spatial dependence of the estimated parameters—obtained from soil geophysical measurements—to constrain model inversions.
5.2.3 Improving spatial estimates of AWC over large regions
DSM techniques based on sites with known AWC components and model inversion using remote-sensing data are still limited in extent and precision for mapping AWC. However, they are complementary approaches that could be used synergistically to improve AWC mapping. Using DSM outputs to constrain model inversions can be the first step toward such synergy. The next step is to re-use in DSM the outputs of punctual model inversions performed in situations that maximize the information about the parameters to be estimated (i.e., for which model error is low and uncertainties in DSM output are high). Approaches that combine different soil inputs have been developed to combine soil property measurements and spectroscopy imagery estimates (Lagacherie et al. 2012; Walker et al. 2017). For soil–plant model inversions, considering these outputs as pseudo-measurements of AWC parameters significantly increases the density of sites with known values of these parameters, which may increase the accuracy of DSM predictions. The challenge is to develop DSM models that can use traditional AWC measurements and model-inversion outputs as input.
6 Conclusion: toward new definitions of AWC?
The objective of this review was to identify the concepts that underlie estimates of AWC and to clarify the methods used in the literature to estimate this fundamental parameter of soil–plant–atmosphere models at different scales. Soil-based approaches are usually based on measuring the water content of soil samples at equilibrium at a given matric potential, or on empirical models based on basic soil characteristics, such as particle-size distribution or bulk density, whether for estimates using PTFs or in DSM approaches. These soil-based approaches thus correspond well to the original and current definitions of AWC and represent a capacity (i.e., the maximum amount of water that soils can store to sustain plant transpiration). Conversely, soil–plant-based approaches are usually based on non-equilibrium approaches, which are based on field measurements of soil water content or plant characteristics when plants are dynamically subjected to climate variations. Estimating AWC directly from field measurements or inverse estimates of soil-vegetation models, whose input data are local field measurements or remotely sensed images of vegetation growth, may not indicate the soil’s capacity to store water. Instead, it indicates the quantity of water that the plant takes up from the soil (i.e., an ability). AWC in this case should be called PAWC. Depending on the climate conditions, this plant AWC-equivalent parameter can differ strongly from the AWC estimated using soil-based approaches. In certain situations, it can be similar to the readily available water content. Despite these differing definitions, estimating AWC and AWC-based parameters can be improved by hybridizing soil-based approaches and soil–plant-based approaches to create high-resolution maps of this hydraulic parameter. Among potential improvements in the near future, we emphasize three. First, estimates of AWC would likely benefit from developing new types of functional PTFs that include not only soil information but also plant-functioning information, especially from remote-sensing data. Second, including available soil data from monitoring systems when inverting models would improve estimates of AWC. GlobalSoilMap products would be particularly relevant to address the difficulty in estimating depth and the influence of uncertainties. Third, a close relationship between soil-based (laboratory-based) AWC measurements and AWC model-inversion outputs would help to develop improved soil mapping products to estimate AWC accurately. These developments in AWC could benefit farmers, who could use them as decision tools in precision agriculture, as well as scientists who use land surface models at the global scale to assess effects of global changes.
Data availability
Not applicable.
Code availability
Not applicable.
References
Abd El-Mageed TA, Semida WM (2015) Effect of deficit irrigation and growing seasons on plant water status, fruit yield and water use efficiency of squash under saline soil. Sci Hortic 186:89–100. https://doi.org/10.1016/j.scienta.2015.02.013
Abdu H, Robinson DA, Seyfried M, Jones SB (2008) Geophysical imaging of watershed subsurface patterns and prediction of soil texture and water holding capacity. Water Resour Res 44:10. https://doi.org/10.1029/2008WR007043
Abreu MC, Martins FB, de Freitas CH, Pereira RAD, Melloni EGP (2015) Thresholds for transpiration, development and growth of Corymbia citriodora (Hook.) KD Hill & LAS Johnson in response to soil water stress. Rev Arvore 39(5):841–852. https://doi.org/10.1590/0100-67622015000500007
Al Majou H, Bruand A, Duval O, Le Bas C, Vautier A (2008) Prediction of soil water retention properties after stratification by combining texture, bulk density and the type of horizon. Soil Use Manage 24(4):383–391. https://doi.org/10.1111/j.1475-2743.2008.00180.x
Algayer B, Lagacherie P, Lemaire J (2020) Adapting the available water content indicator to forest soils: an example from the Haut-Languedoc (France). Geoderma 357:113962. https://doi.org/10.1016/j.geoderma.2019.113962
Allen RG, Pereira LS, Raes D, Smith M (1998) Crop evapotranspiration: guidelines for computing crop water requirements. FAO Irrigation and Drainage Paper (56)
Araya S, Ostendorf B, Lyle G., Lewis M (2013) Crop phenology based on MODIS satellite imagery as an indicator of plant available water content. 20th International Congress on Modeling and Simulation. Modeling & Simulation Soc Australia & New Zealand Inc, Christchurch, 1896-1902
Arrouays D, Jamagne M (1993) Sur la possibilité d'estimer les propriétés de rétention en eau de sols limoneux lessivés hydromorphes du sud-ouest de la France à partir de leurs caractéristiques de constitution. CR Acad Agric Fr 79(1):111–121
Arrouays D, Grundy MG, Hartemink AE, Hempel JW, Heuvelink GBM, Hong SY, Lagacherie P et al (2014) GlobalSoilMap: toward a fine-resolution global grid of soil properties. In: Advances in Agronomy, 125. Elsevier Academic Press, San Diego, pp 93–134. https://doi.org/10.1016/B978-0-12-800137-0.00003-0
Asgarzadeh H, Mosaddeghi MR, Dexter AR, Mahboubi AA, Neyshabouri MR (2014) Determination of soil available water for plants: consistency between laboratory and field measurements. Geoderma 226:8–20. https://doi.org/10.1016/j.geoderma.2014.02.020
Assouline S, Or D (2014) The concept of field capacity revisited: defining intrinsic static and dynamic criteria for soil internal drainage dynamics. Water Resour Res 50(6):4787–4802. https://doi.org/10.1002/2014WR015475
Bandara R, Walker JP, Rüdiger C, Merlin O (2015) Towards soil property retrieval from space: an application with disaggregated satellite observations. J Hydrol 522:582–593. https://doi.org/10.1016/j.jhydrol.2015.01.018
Barker JB, Heeren DM, Neale CMU, Rudnick DR (2018) Evaluation of variable rate irrigation using a remote-sensing-based model. Agr Water Manage 203:63–74. https://doi.org/10.1016/j.agwat.2018.02.022
Basile A, Bonfante A, Coppola A, De Mascellis R, Bolognesi SF, Terribile F, Manna P (2019) How does PTF interpret soil heterogeneity? A stochastic approach applied to a case study on maize in Northern Italy. Water 11(2):275. https://doi.org/10.3390/w11020275
Batjes NH (1996) Development of a world data set of soil water retention properties using pedotransfer rules. Geoderma 71(1-2):31–52. https://doi.org/10.1016/0016-7061(95)00089-5
Batjes NH (2016) Harmonized soil property values for broad-scale modeling (WISE30sec) with estimates of global soil carbon stocks. Geoderma 269:61–68. https://doi.org/10.1016/j.geoderma.2016.01.034
Ben-Dor E, Chabrillat S, Dematte JAM, Taylor GR, Hill J, Whiting ML, Sommer S (2009) Using imaging spectroscopy to study soil properties. Remote Sens Environ 113:S38–S55. https://doi.org/10.1016/j.rse.2008.09.019
Besson A, Cousin I, Bourennane H, Nicoullaud B, Pasquier C, Richard G, Dorigny A, King D (2010) The spatial and temporal organization of soil water at the field scale as described by electrical resistivity measurements. Eur J Soil Sci 61(1):120–132. https://doi.org/10.1111/j.1365-2389.2009.01211.x
Beudez N, Doussan C, Lefeuve-Mesgouez G, Mesgouez A (2013) Influence of three root spatial arrangement on soil water flow and uptake. Results from an explicit and an equivalent, upscaled, model. Procedia Environ Sci 19:37–46. https://doi.org/10.1016/j.proenv.2013.06.005
Bindi M, Bellesi S, Orlandini S, Fibbi L, Moriondo M, Sinclair T (2005) Influence of water deficit stress on leaf area development and transpiration of Sangiovese grapevines grown in pots. Am J Enol Viticult 56(1):68–72
Bittelli M, Flury M (2009) Errors in water retention curves determined with pressure plates. Soil Sci Soc Am J 73(5):1453–1460. https://doi.org/10.2136/sssaj2008.0082
Bouma J, van Lanen HAJ (1987) Transfer functions and threshold values: from soil characteristics to land qualities. In: Beek KJ, Burrough PA, McCormack DE (eds) Quantified land evaluation procedures: Proceedings of the international workshop. Washington D.C, USA, pp 106–110
Bourennane H, Hinschberger F, Chartin C, Salvador-Blanes S (2017) Spatial filtering of electrical resistivity and slope intensity: enhancement of spatial estimates of a soil property. J Appl Geophys 138:210–219. https://doi.org/10.1016/j.jappgeo.2017.01.032
Bousbih S, Zribi M, Lili-Chabaane Z, Baghdadi N, El Haj M, Gao Q, Mougenot B (2017) Potential of Sentinel-1 radar data for the assessment of soil and cereal cover parameters. Sensors-Basel 17(11):18. https://doi.org/10.3390/s17112617
Braga RP, Jones JW (2004) Using optimization to estimate soil inputs of crop models for use in site-specific management. T ASAE, 47(5):1821-1831. 10.13031/2013.17599
Briggs LJ, MacLane JW (1910) Moisture equivalent determinations and their application. American Society of Agronomy Proceedings 2:138-147
Briggs LJ, Shantz HL (1911) A wax seal method for determining the lower limit of available soil moisture. Bot Gaz 51:210–2019. https://doi.org/10.1086/330474
Briggs LJ, Shantz HL (1912) The wilting coefficient and its indirect determination. Bot Gaz 53:20–37. https://doi.org/10.1086/330708
Brillante L, Bois B, Mathieu O, Leveque J (2016) Electrical imaging of soil water availability to grapevine: a benchmark experiment of several machine-learning techniques. Precis Agric 17(6):637–658. https://doi.org/10.1007/s11119-016-9441-1
Brisson N, Seguin S, Bertuzzi P (1992) Agrometeorological soil water balance for crop simulation models. Agri Forest Met 59(3-4):267–287. https://doi.org/10.1016/0168-1923(92)90097-N
Bruand A, Duval O, Cousin I (2004) Estimation des propriétés de rétention en eau des sols à partir de la base de données SOLHYDRO: Une première proposition combinant le type d'horizon, sa texture et sa densité apparente. Etude et Gestion des Sols 11(3):323–334
Burk L, Dalgliesh N (2013) Estimating plant available water capacity. Grains Research and Development Corporation Pub. Australia. https://www.apsim.info/wp-content/uploads/2019/10/GRDC-Plant-Available-Water-Capacity-2013.pdf. Accessed 25 Nov 2021
Burke EJ, Gurney RJ, Simmonds LP, O'Neill PE (1998) Using a modeling approach to predict soil hydraulic properties from passive microwave measurements. IEEE T Geosci Remote 36(2):454–462. https://doi.org/10.1109/36.662729
Cabelguenne M, Debaeke P (1998) Experimental determination and modeling of the soil water extraction capacities of crops of maize, sunflower, soya bean, sorghum and wheat. Plant Soil 202(2):175–192. https://doi.org/10.1023/A:1004376728978
Casadebaig P, Debaeke P, Lecoeur J (2008) Thresholds for leaf expansion and transpiration response to soil water deficit in a range of sunflower genotypes. Eur J Agron 28(4):646–654. https://doi.org/10.1016/j.eja.2008.02.001
Cassel DK, Sweeney MD (1974) In situ soil holding capacities of selected North Dakota soils. North Dakota Agric Exp Stn Bull 495
Castellini M, Iovino M (2019) Pedotransfer functions for estimating soil water retention curve of Sicilian soils. Arch Agron Soil Sci 65(10):1401–1416. https://doi.org/10.1080/03650340.2019.1566710
Charoenhirunyingyos S, Honda K, Kamthonkiat D, Ines AVM (2011) Soil moisture estimation from inverse modeling using multiple criteria functions. Comput Electron Agr 75(2):278–287. https://doi.org/10.1016/j.compag.2010.12.004
Chen X, Yin Y (2006) The flexible tolerance method for estimating hydrologic parameters in the root zone. J Am Water Resour As 42(2):495–512. https://doi.org/10.1111/j.1752-1688.2006.tb03853.x
Chen S, Mulder VL, Martin MP, Walter C, Lacoste M, Richer-de-Forges AC, Saby NP, Loiseau T, Hu B, Arrouays D (2019) Probability mapping of soil thickness by random survival forest at a national scale. Geoderma 344:184–194. https://doi.org/10.1016/j.geoderma.2019.03.016
Colman EA (1947) A laboratory procedure for determining the field capacity of soils. Soil Sci 63(4):277–283
Combres JC, Le Mezo L, Mete M and Bourjon B (1999) Réserve utile et mesures d'humidité. Difficulté de calage des modèles de bilan hydrique. Agriculture et Développement 24:39–47
Coops NC, Waring RH, Hilker T (2012) Prediction of soil properties using a process-based forest growth model to match satellite-derived estimates of leaf area index. Remote Sens Environ 126:160–173. https://doi.org/10.1016/j.rse.2012.08.024
Coppola A, Dragonetti G, Comegna A, Lamaddalena N, Caushi B, Haikal MA, Basile A (2013) Measuring and modeling water content in stony soils. Soil Till Res 128:9–22. https://doi.org/10.1016/j.still.2012.10.006
Coudert B, Ottlé C, Briottet X (2008) Monitoring land surface processes with thermal infrared data: Calibration of SVAT parameters based on the optimisation of diurnal surface temperature cycling features. Remote Sens Environ 112(3):872–887. https://doi.org/10.1016/j.rse.2007.06.024
Cousin I, Nicoullaud B, Coutadeur C (2003) Influence of rock fragments on the water retention and water percolation in a calcareous soil. Catena 53(2):97–114. https://doi.org/10.1016/S0341-8162(03)00037-7
Czyz EA, Dexter AR (2012) Plant wilting can be caused either by the plant or by the soil. Soil Res 50(8):708–713. https://doi.org/10.1071/SR12189
Czyz EA, Dexter AR (2013) Influence of soil type on the wilting of plants. Int Agrophys 27(4):385–390. https://doi.org/10.2478/intag-2013-0008
Dai YJ, Wei SG, Nan W, Xin QC, Hua Y et al (2019) A review of the global soil property maps for Earth system models. Soil 5(2):137–158. https://doi.org/10.5194/soil-5-137-2019
Das NN, Mohanty BP, Njoku EG (2008) A Markov chain Monte Carlo algorithm for upscaled soil-vegetation-atmosphere-transfer modeling to evaluate satellite-based soil moisture measurements. Water Resour Res 44(5):W05416. https://doi.org/10.1029/2007WR006472
daSilva AP, Kay BD (1997) Estimating the least limiting water range of soils from properties and management. Soil Sci Soc America J 61(3):877–883. https://doi.org/10.2136/sssaj1997.03615995006100030023x
Davidson JM, Stone DR, Nielsen DR, LaRue ME (1969) Field measurement and use of soil-water properties. Water Resour Res 5:1312–1321. https://doi.org/10.1029/WR005i006p01312
de Jong van Lier Q (2017) Field capacity, a valid upper limit of crop available water? Agric Water Manag 193:214–220. https://doi.org/10.1016/j.agwat.2017.08.017
Dejong R, Shields JA (1988) Available water-holding capacity maps of Alberta, Saskatchewan and Manitoba. Can J Soil Sci 68(1):157–163. https://doi.org/10.4141/cjss88-015
Dente L, Satalino G, Mattia F, Rinaldi M (2008) Assimilation of leaf area index derived from ASAR and MERIS data into CERES-Wheat model to map wheat yield. Remote Sens Environ 112(4):1395–1407. https://doi.org/10.1016/j.rse.2007.05.023
Dewaele H, Munier S, Albergel C, Planque C, Laanaia N, Carrer D, Calvet JC (2017) Parameter optimisation for a better representation of drought by LSMs: inverse modeling vs. sequential data assimilation. Hydrol Earth Syst Sc 21(9):4861–4878. https://doi.org/10.5194/hess-21-4861-2017
Dharumarajan S, Hegde R, Lalitha M, Kalaiselvi B, Singh SK (2019) Pedotransfer functions for predicting soil hydraulic properties in semi-arid regions of Karnataka Plateau, India. Curr Sci India 116(7):1237–1246. https://doi.org/10.18520/cs/v116/i7/1233-1237
Doussan C, Pierret A, Garrigues E, Pagès L (2006) Water uptake by plant roots: II - modeling of water transfer in the soil root-system with explicit account of flow within the root system - comparison with experiments. Plant Soil 283(1-2):99–117. https://doi.org/10.1007/s11104-004-7904-z
Droogers P, vanderMeer FBW, Bouma J (1997) Water accessibility to plant roots in different soil structures occurring in the same soil type. Plant Soil 188(1):83–91. https://doi.org/10.1023/A:1004256113198
Eitzinger J, Trnka M, Hosch J, Zalud Z, Dubrovsky M (2004) Comparison of CERES, WOFOST and SWAP models in simulating soil water content during growing season under different soil conditions. Ecol Model 171(3):223–246. https://doi.org/10.1016/j.ecolmodel.2003.08.012
Feddes RA, Raats PAC (2004) Parameterizing the soil–water–plant root system. In: Feddes RA, van Dam JC (eds) Unsaturated-zone modeling: progress, challenges and applications. Springer, pp 95–141 ISBN: 9781402029189
Ferrant S, Bustillo V, Burel E, Salmon-Monviola J, Claverie M, Jarosz N, Yin T et al (2016) Extracting soilwater holding capacity parameters of a distributed agro-hydrological model from high resolution optical satellite observations series. Remote Sens-Basel 8(2):154. https://doi.org/10.3390/rs8020154
Ferreyra RA, Jones JW, Graham WD (2006) Parameterizing spatial crop models with inverse modeling: sources of error and unexpected results. T ASABE 49(5): 1547-1561. 10.13031/2013.22029
Finsterle S, Kowalsky MB (2008) Joint hydrological-geophysical inversion for soil structure identification. Vadose Zone J 7(1):287–293. https://doi.org/10.2136/vzj2006.0078
Florin MJ, McBratney AB, Whelan BM, Minasny B (2011) Inverse meta-modeling to estimate soil available water capacity at high spatial resolution across a farm. Precis Agric 12(3):421–438. https://doi.org/10.1007/s11119-010-9184-3
Folberth C, Skalsky R, Moltchanova E, Balkovic J, Azevedo LB, Obersteiner M, van der Velde M (2016) Uncertainty in soil data can outweigh climate impact signals in global crop yield simulations. Nat Commun 7:13. https://doi.org/10.1038/ncomms11872
Fortes R, Millan S, Prieto MH, Campillo C (2015) A methodology based on apparent electrical conductivity and guided soil samples to improve irrigation zoning. Precis Agric 16(4):441–454. https://doi.org/10.1007/s11119-015-9388-7
Frison A, Cousin I, Montagne D, Cornu S (2009) Soil hydraulic properties in relation to local rapid soil changes induced by field drainage: a case study. Eur J Soil Sci 60(4):662–670. https://doi.org/10.1111/j.1365-2389.2009.01143.x
Furr JR, Reeve JO (1945) Range of soil-moisture percentages through which plants undergo permanent wilting in some soils from semi-arid irrigated areas. J Agr Res 71:149
Gaudin R, Gary C (2012) Model-based evaluation of irrigation needs in Mediterranean vineyards. Irrigation Sci 30(5):449–459. https://doi.org/10.1007/s00271-012-0349-x
Gee GW, Ward AL, Zhang ZF, Campbell GS, Mathison J (2002) The influence of hydraulic nonequilibrium on pressure plate data. Vadose Zone J 1(1):172–178. https://doi.org/10.2136/vzj2002.1720
Genere V, Bourennane H, Pasquier C, Cousin I (2015) The benefit of using a covariate for minimizing the sample size needed to estimate mean value of a target variable at field scale: a case study of Available Water Capacity. Comput Electron Agr 118:9–14. https://doi.org/10.1016/j.compag.2015.08.018
Gobat JM, Aragno M, Matthey W (2004) The living soil. Fundamentals of soil science and soil biology. Science Publishers, Enfield (USA) / Plymouth (UK)
Gomez C, Lagacherie P, Coulouma G (2012) Regional predictions of eight common soil properties and their spatial structures from hyperspectral Vis–NIR data. Geoderma 189:176–185. https://doi.org/10.1016/j.geoderma.2012.05.023
Gooley L, Huang J, Page D, Triantafilis J (2014) Digital soil mapping of available water content using proximal and remotely sensed data. Soil Use and Manage 30(1):139–151. https://doi.org/10.1111/sum.12094
Gribb MM, Forkutsa I, Hansen A, Chandler DG, McNamara JP (2009) The effect of various soil hydraulic property estimates on soil moisture simulations. Vadose Zone J 8(2):321–331. https://doi.org/10.2136/vzj2008.0088
Grunwald S (2009) Multi-criteria characterization of recent digital soil mapping and modeling approaches. Geoderma 152(3-4):195–207. https://doi.org/10.1016/j.geoderma.2009.06.003
Guérif M, Houlès V, Makowski D, Lauvernet C (2006) Data assimilation and parameter estimation for precision agriculture using the crop model STICS. In: Wallach D, Makowski D, Jones JW (eds) Working with dynamic crop models. Elsevier, The Netherlands, pp 395–440
Gutmann ED, Small EE (2007) A comparison of land surface model soil hydraulic properties estimated by inverse modeling and pedotransfer functions. Water Resour Res 43(5):W05418. https://doi.org/10.1029/2006WR005135
Gutmann ED, Small EE (2010) A method for the determination of the hydraulic properties of soil from MODIS surface temperature for use in land-surface models. Water Resour Res 46:W06520. https://doi.org/10.1029/2009WR008203
Haghverdi A, Cornelis WM, Ghahraman B (2012) A pseudo-continuous neural network approach for developing water retention pedotransfer functions with limited data. J Hydrol 442:46–54. https://doi.org/10.1016/j.jhydrol.2012.03.036
He D, Oliver Y, Wang E (2021) Predicting plant available water holding capacity of soils from crop yield. Plant Soil 459(1):315–328. https://doi.org/10.1007/s11104-020-04757-0
Hedley CB, Yule IJ (2009) A method for spatial prediction of daily soil water status for precise irrigation scheduling. Agr Water Manage 96(12): 1737-1745. 10.1016/j.agwat.2009.07.009
Heil K, Schmidhalter U (2017) The application of EM38: determination of soil parameters, selection of soil sampling points and use in agriculture and archaeology. Sensors-Basel 17(11):44. https://doi.org/10.3390/s17112540
Hezarjaribi A, Sourell H (2007) Feasibility study of monitoring the total available water content using non-invasive electromagnetic induction-based and electrode-based soil electrical conductivity measurements. Irrig Drain 56(1):53–65. https://doi.org/10.1002/ird.289
Hodge A, Berta G, Doussan C, Merchan F, Crespi M (2009) Plant root growth, architecture and function. Plant Soil 321(1-2):153–187. https://doi.org/10.1007/s11104-009-9929-9
Hong SY, Minasny B, Han KH, Kim Y, Lee K (2013) Predicting and mapping soil available water capacity in Korea. PeerJ 1:e71. https://doi.org/10.7717/peerj.71
Hou Z, Rubin Y (2005) On minimum relative entropy concepts and prior compatibility issues in vadose zone inverse and forward modeling. Water Resour Res 41(12):W12425. https://doi.org/10.1029/2005WR004082
Huang Q, Akinremi OO, Rajan RS, Bullock R (2004) Laboratory and field evaluation of five soil water sensors. Can J Soil Sci 84(4):431–438. https://doi.org/10.4141/S03-097
Hupet F, Lambot S, Feddes RA, Van Dam JC, Vanclooster M (2003) Estimation of root water uptake parameters by inverse modeling with soil water content data. Water Resour Res 39(11):1312. https://doi.org/10.1029/2003WR002046
Hupet F, Trought MCT, Greven M, Green SR, Clothier BE (2005) Data requirements for identifying macroscopic water stress parameters: a study on grapevines. Water Resour Res 41(6):15. https://doi.org/10.1029/2003WR002046
Ines AVM, Mohanty BP (2008) Parameter conditioning with a noisy Monte Carlo genetic algorithm for estimating effective soil hydraulic properties from space. Water Resour Res 44(8):W08441. https://doi.org/10.1029/2007WR006125
Irmak A, Jones JW, Batchelor WD, Paz JO (2001) Estimating spatially variable soil properties for application of crop models in precision farming. T ASAE 44(5):1343-1353. 10.13031/2013.6424
Jabro JD, Evans RG, Kim Y, Iversen WM (2009) Estimating in situ soil-water retention and field water capacity in two contrasting soil textures. Irrigation Sci 27(3):223–229. https://doi.org/10.1007/s00271-008-0137-9
Jamagne M, Betremieux R, Bégon JC, Mori A (1977) Quelques données sur la variabilité dans le milieu naturel de la Réserve en Eau Utile des sols. Bulletin Technique d'Information 324-325:627–641
Javaux M, Schröder T, Vanderborght J, Vereecken H (2008) Use of a three-dimensional detailed modeling approach for predicting root water uptake. Vadose Zone J 7(3):1079-1088
Jégo G, Pattey E, Liu J (2012) Using Leaf Area Index, retrieved from optical imagery, in the STICS crop model for predicting yield and biomass of field crops. Field Crop Res 131:63–74. https://doi.org/10.1016/j.fcr.2012.02.012
Jégo G, Pattey E, Morteza Mesbah S, Liu J, Duchesne I (2015) Impact of the spatial resolution of climatic data and soil physical properties on regional corn yield predictions using the STICS crop model. Int J Appl Earth Obs 41:11–22. https://doi.org/10.1016/j.jag.2015.04.013
Jenny H (1941) Factors of soil formation: a system of quantitative pedology. McGraw-Hill, New York
Jhorar RK, Bastiaanssen WGM, Feddes RA, Van Dam JC (2002) Inversely estimating soil hydraulic functions using evapotranspiration fluxes. J Hydrol 258(1-4):198–213. https://doi.org/10.1016/S0022-1694(01)00564-9
Jhorar RK, Van Dam JC, Bastiaanssen WGM, Feddes RA (2004) Calibration of effective soil hydraulic parameters of heterogeneous soil profiles. J Hydrol 285(1-4):233–247. https://doi.org/10.1016/j.jhydrol.2003.09.003
Jiang PP, Anderson SH, Kitchen NR, Sudduth KA, Sadler EJ (2007) Estimating plant-available water capacity for claypan landscapes using apparent electrical conductivity. Soil Sci Soc Am J 71(6):1902–1908. https://doi.org/10.2136/sssaj2007.0011
Jiang P, Kitchen NR, Anderson SH, Sadler EJ, Sudduth KA (2008) Estimating plant-available water using the simple inverse yield model for claypan landscapes. Agron J 100(3):830–836. https://doi.org/10.2134/agronj2007.0216
Jin XX, Wang S, Yu N, Zou HT, An J, Zhang YL, Wang JK, Zhang YL (2018) Spatial predictions of the permanent wilting point in arid and semi-arid regions of Northeast China. J Hydrol 564:367–375. https://doi.org/10.1016/j.hydrol.2018.07.038
Klein VA, Reichert JM, Reinert DJ 2006. Água disponível em um Latossolo Vermelho argiloso e murcha fisiológica de culturas. R Bras Eng Agric Amb 106:46–650
Klein T, Rotenberg E, Cohen-Hilaleh E, Raz-Yaseef N, Tatarinov F, Preisler Y, Ogee J, Cohen S, Yakir D (2014) Quantifying transpirable soil water and its relations to tree water use dynamics in a water- limited pine forest. Ecohydrology 7(2):409–419. https://doi.org/10.1002/eco.1360
Konrad W, Roth-Nebelsick A (2011) Integrating plant gas exchange, soil, and hydrological parameters in an analytical model: potential use and limitations. Vadose Zone J 10(4):1196–1204. https://doi.org/10.2136/vzj2010.0157
Kunrath TR, de Berranger C, Charrier X, Gastal F, Carvalho PCD, Lemaire G, Emile JC, Durand JL (2015) How much do sod-based rotations reduce nitrate leaching in a cereal cropping system? Agr Water Manage 150:46–56. https://doi.org/10.1016/j.agwat.2014.11.015
Lagacherie P, Gomez C (2018) Vis-NIR-SWIR remote sensing products as new soil data for digital soil mapping. In: McBratney A, Minasny B, Stockmann U (eds) Pedometrics. Progress in Soil Science. Springer, Cham. pp. 415–437 https://doi.org/10.1007/978-3-319-63439-5_13
Lagacherie P, McBratney AB (2007) Spatial soil information systems and spatial soil inference systems: perspectives for digital soil mapping. In: Lagacherie P, McBratney AB, Voltz M (eds) digital soil mapping: an introductory perspective. Developments in Soil Science. Elsevier Scientific Publ Co, Amsterdam, pp 3–22
Lagacherie P, Bailly JS, Monestiez P, Gomez C (2012) Using scattered hyperspectral imagery data to map the soil properties of a region. Eur J Soil Sci 63(1):110–119. https://doi.org/10.1111/j.1365-2389.2011.01409.x
Leao TP, da Silva AP, Macedo MCM, Imhoff S, Euclides VPB (2006) Least limiting water range: a potential indicator of changes in near-surface soil physical quality after the conversion of Brazilian Savanna into pasture. Soil Till Res 88(1-2):279–285. https://doi.org/10.1016/j.still.2005.06.014
Lebon E, Dumas V, Pieri P, Schultz HR (2003) Modeling the seasonal dynamics of the soil water balance of vineyards. Funct Plant Biol 30(6):699–710. https://doi.org/10.1071/FP02222
Leenaars JGB, Claessens L, Heuvelink GBM, Hengla T, Gonzalez MR, van Bussel LGJ, Guilpart N, Yang HS, Cassman KG (2018) Mapping rootable depth and root zone plant-available water holding capacity of the soil of sub-Saharan Africa. Geoderma 324:18–36. https://doi.org/10.1016/j.geoderma.2018.02.046
Leenhardt D, Voltz M, Bornand M, Webster R (1994) Evaluating soil maps for prediction of soil-water properties. Eur J Soil Sci 45(3):293–301. https://doi.org/10.1111/j.1365-2389.1994.tb00512.x
Levi MR, Schaap MG, Rasmussen C (2015) Application of spatial pedotransfer functions to understand soil modulation of vegetation response to climate. Vadose Zone J 14(9). https://doi.org/10.2136/vzj2014.09.0126
Link J, Graeff S, Batchelor WD, Claupein W (2006) Evaluating the economic and environmental impact of environmental compensation payment policy under uniform and variable-rate nitrogen management. Agr Syst 91(1-2):135–153. https://doi.org/10.1016/j.agsy.2006.02.003
Lo T, Heeren DM, Mateos L, Luck JD, Martin DL, Miller KA, Barker JB, Shaver TM (2017) Field characterization of field capacity and root zone available water capacity for variable rate irrigation. Appl Eng Agric 33(4): 559-572. 10.13031/aea.11963
Logsdon S (2019) Should upper limit of available water be based on field capacity? Agrosyst Geosci Environ 2(1-6):190066. https://doi.org/10.2134/age2019.08.0066
Mariethoz G, Renard P, Caers J (2010) Bayesian inverse problem and optimization with iterative spatial resampling. Water Resour Res 46:W11530. https://doi.org/10.1029/2010WR009274
Maynard JJ, Levi MR (2017) Hyper-temporal remote sensing for digital soil mapping: characterizing soil-vegetation response to climatic variability. Geoderma 285:94–109. https://doi.org/10.1016/j.geoderma.2016.09.024
McBratney AB, Santos MLM, Minasny B (2003) On digital soil mapping. Geoderma 117(1-2):3–52. https://doi.org/10.1016/S0016-7061(03)00223-4
McDonnell JJ (2014) The two water worlds hypothesis: eco-hydrological separation of water between streams and trees? WIREs Water 1:323–329. https://doi.org/10.1002/wat2.1027
Minasny B, McBratney AB (2002) Uncertainty analysis for pedotransfer functions. European Journal of Soil Science 53(3):417–429. https://doi.org/10.1046/j.1365-2389.2002.00452.x
Minasny B, Hartemink AE (2011) Predicting soil properties in the tropics. Earth-Sci Rev 106(1-2):52–62. https://doi.org/10.1016/j.earscirev.2011.01.005
Minasny B, McBratney AB (2016) Digital soil mapping: a brief history and some lessons. Geoderma 264:301–311. https://doi.org/10.1016/j.geoderma.2015.07.017
Mohanty BP (2013) Soil hydraulic property estimation using remote sensing: a review. Vadose Zone J 12(4):1–9. https://doi.org/10.2136/vzj2013.06.0100
Mohrath D, Bruckler L, Bertuzzi P, Gaudu JC, Bourlet M (1997) Error analysis of an evaporation method for determining hydrodynamic properties in unsaturated soil. Soil Sci Soc Am J 61(3):725–735. https://doi.org/10.2136/sssaj1997.03615995006100030004x
Morgan KT, Parsons LR, Wheaton TA (2001) Comparison of laboratory- and field-derived soil water retention curves for a fine sand soil using tensiometric, resistance and capacitance methods. Plant Soil 234(2):153–157. https://doi.org/10.1023/A:1017915114685
Morgan CLS, Norman JM, Lowery B (2003) Estimating plant-available water across a field with an inverse yield model. Soil Sci Soc Am J 67(2):620–629. https://doi.org/10.2136/sssaj2003.6200a
Mulder VL, Lacoste M, Richer-De-Forges AC, Arrouays D (2016) GlobalSoilMap France: high-resolution spatial modeling the soils of France up to two meter depth. Sci Total Environ 573:1352–1369. https://doi.org/10.1016/j.scitotenv.2016.07.066
Nachabe MH (1998) Refining the definition of field capacity in the literature. J Irrig Drain E-Asce 124(4):230–232. https://doi.org/10.1061/(ASCE)0733-9437(1998)124:4(230)
Nemes A, Schaap MG, Leij FJ, Wosten JHM (2001) Description of the unsaturated soil hydraulic database UNSODA version 2.0. J Hydrol 251(3-4):151–162. https://doi.org/10.1016/S0022-1694(01)00465-6
Nemes A, Rawls WJ, Pachepsky YA, van Genuchten MT (2006) Sensitivity analysis of the nonparametric nearest neighbor technique to estimate soil water retention. Vadose Zone J 5(4):1222–1235. https://doi.org/10.2136/vzj2006.0017
Nemes A, Pachepsky YA, Timlin DJ (2011) Toward Improving global estimates of field soil water capacity. Soil Sci Soc Am J 75(3):807–812. https://doi.org/10.2136/sssaj2010.0251
Nielsen DC, Vigil MF (2018) Soil water extraction for several dryland crops. Agron J 110:2447–2455. https://doi.org/10.2134/agronj2018.05.0335
Ortega-Blu R, Molina-Roco M (2016) Evaluation of vegetation indices and apparent soil electrical conductivity for site-specific vineyard management in Chile. Precis Agric 17(4):434–450. https://doi.org/10.1007/s11119-016-9429-x
Ortuani B, Chiaradia EA, Priori S, L'Abate G, Canone D, Comunian A, Giudici M, Mele M, Facchi A (2016) Mapping soil water capacity through EMI survey to delineate site-specific management units within an irrigated field. Soil Sci 181(6):252–263. https://doi.org/10.1097/SS.0000000000000159
Ottoni TB, Ottoni MV, de Oliveira MB, de Macedo JR, Reichardt K (2014) Revisiting field capacity (FC): variation of definition of FC and its estimations from pedotransfer functions. Rev Bras Cienc Solo 38(6):1750–1764. https://doi.org/10.1590/S0100-06832014000600010
Pachepsky YA, Rawls WJ (1999) Accuracy and reliability of pedotransfer functions as affected by grouping soils. Soil Sci Soc Am J 63(6):1748–1757. https://doi.org/10.2136/sssaj1999.6361748x
Pachepsky Y, Rawls WJ (2004) Preface: status of pedotransfer functions. In: Pachepsky Y, Rawls WJ (eds) Development of pedotranfer functions in soil hydrology. Development in soil science. Elsevier, pp vii–xvi
Pasquier C, Bourennane H, Cousin I, Seger M, Dabas M, Thiesson J, Tabbagh A (2016) Comparison between thermal airborne remote sensing, multi-depth electrical resistivity profiling, and soil mapping: an example from Beauce (Loiret, France). Near Surf Geophys 14(4): 345-356. 10.3997/1873-0604.2016021
Pellegrino A, Lebon E, Voltz M, Wery J (2004) Relationships between plant and soil water status in vine (Vitis vinifera L.). Plant Soil 266(1-2):129–142. https://doi.org/10.1007/s11104-005-0874-y
Prieto I, Ryel RJ (2014) Internal hydraulic redistribution prevents the loss of root conductivity during drought. Tree Physiol 34(1):39–48. https://doi.org/10.1093/treephys/tpt115
Priori S, Pellegrini S, Perria R, Puccioni S, Storchi P, Valboa G, Costantini EAC (2019) Scale effect of terroir under three contrasting vintages in the Chianti Classico area (Tuscany, Italy). Geoderma 334:99–112. https://doi.org/10.1016/j.geoderma.2018.07.048
Qu W, Bogena HR, Huisman JA, Martinez G, Pachepsky YA, Vereecken H (2014) Effects of soil hydraulic properties on the spatial variability of soil water content: evidence from sensor network data and inverse modeling. Vadose Zone J 13(12). https://doi.org/10.2136/vzj2014.07.0099
Ratliff LF, Ritchie JT, Cassel DK (1983) Field-measured limits of soil-water availability as related to laboratory-measured properties. Soil Sci Soc Am J 47(4):770–775. https://doi.org/10.2136/sssaj1983.03615995004700040032x
Rawls WJ, Brakensiek DL, Saxton KE (1982) Estimation of soil water properties. T ASAE 25(5): 1316-1320. 10.13031/2013.33720
Richards LA, Weaver LR (1943) Fifteen-atmosphere percentage as related to the permanent wilting percentage. Soil Sci 56:331–339
Richards LA, Weaver LR (1944) Moisture retention by some irrigated soils as related to soil-moisture tension. J Agric Res 69:215–235
Richards LA, Wadleigh CH (1952) Soil Water and Plant Growth Soil Science 74:264. https://doi.org/10.1097/00010694-195209000-00024
Richards LA, Campbell RB, Healton LH (1949) Some freezing point depression measurements on cores of soil in which cotton and sunflower plants were wilted. Proceedings Soil Sci Soc Am Pro 14: 47-50.
Ridler ME, Sandholt I, Butts M, Lerer S, Mougin E, Timouk F, Kergoat L, Madsen H (2012) Calibrating a soil-vegetation-atmosphere transfer model with remote sensing estimates of surface temperature and soil surface moisture in a semi arid environment. J Hydrol 436:1–12. https://doi.org/10.1016/j.jhydrol.2012.01.047
Ritchie JT (1981) Soil-water Availability. Plant Soil 58(1-3):327–338. https://doi.org/10.1007/BF02180061
Ritter A, Hupet F, Munoz-Carpena R, Lambot S, Vanclooster M (2003) Using inverse methods for estimating soil hydraulic properties from field data as an alternative to direct methods. Agr Water Manage 59(2):77–96. https://doi.org/10.1016/S0378-3774(02)00160-9
Robinson DA, Campbell CS, Hopmans JW, Hornbuckle BK, Jones SB, Knight R, Ogden F, Selker J, Wendroth O (2008) Soil moisture measurement for ecological and hydrological watershed-scale observatories: A review. Vadose Zone J 7(1):358–389. https://doi.org/10.2136/vzj2007.0143
Roman Dobarco M, Bourennane H, Arrouays D, Saby NPA, Cousin I, Martin MP (2019a) Uncertainty assessment of GlobalSoilMap soil available water capacity products: A French case study. Geoderma 344:14–30. https://doi.org/10.1016/j.geoderma.2019.02.036
Roman Dobarco M, Cousin I, Le Bas C, Martin MP (2019b) Pedotransfer functions for predicting available water capacity in French soils, their applicability domain and associated uncertainty. Geoderma 336:81–95. https://doi.org/10.1016/j.geoderma.2018.08.022
Romano N, Palladino M (2002) Prediction of soil water retention using soil physical data and terrain attributes. J Hydrol 265(1-4):56–75. https://doi.org/10.1016/S0022-1694(02)00094-X
Romano N, Santini A (2002) Field water capacity. In: J.H.D.a.G.C.T. (ed) Methods of Soil Analysis: Part 4. Physical Methods. Soil Science Society of America, Madison, Wis, pp 722-738
Russo D, Bresler E, Shani U, Parker JC (1991) Analyses of infiltration events in relation to determining soil hydraulic properties by inverse problem methodology. Water Resour Res 27(6):1361–1373. https://doi.org/10.1029/90WR02776
Salter PJ, Haworth M (1961) The available-water capacity of a sandy loam soil. 1). A critical comparison of methods of determining the moisture content of soil at field capacity and at the permanent wilting percentage. J Soil Sci 12. https://doi.org/10.1111/j.1365-2389.1961.tb00922.x
Samouelian A, Cousin I, Tabbagh A, Bruand A, Richard G (2005) Electrical resistivity survey in soil science: a review. Soil Till Res 83(2):173–193. https://doi.org/10.1016/j.still.2004.10.004
Santanello JA, Peters-Lidard CD, Garcia ME, Mocko DM, Tischler MA, Moran MS, Thoma DP (2007) Using remotely-sensed estimates of soil moisture to infer soil texture and hydraulic properties across a semi-arid watershed. Remote Sens Environ 110(1):79–97. https://doi.org/10.1016/j.rse.2007.02.007
Scharnagl B, Vrugt J, Vereecken H, Herbst M (2011) Inverse modeling of in situ soil water dynamics: Investigating the effect of different prior distributions of the soil hydraulic parameters. Hydrol Earth Syst Sc 15(10):3043–3059. https://doi.org/10.5194/hess-15-3043-2011
Schelle H, Iden SC, Fank J Durner W (2012) Inverse Estimation of Soil Hydraulic and Root Distribution Parameters from Lysimeter Data. Vadose Zone Journal 11. https://doi.org/10.2136/vzj2011.0169
Schelle H, Durner W, Iden SC, Fank J (2013) Simultaneous estimation of soil hydraulic and root distribution parameters from lysimeter data by inverse modeling. Procedia Environ Sci 19:564–573. https://doi.org/10.1016/j.proenv.2013.06.064
Schneider S, Jacques D, Mallants D (2013) Inverse modeling with a genetic algorithm to derive hydraulic properties of a multi-layered forest soil. Soil Res 51(5):372–389. https://doi.org/10.1071/SR13144
Scholer M, Irving J, Binley A, Holliger K (2011) Estimating vadose zone hydraulic properties using ground penetrating radar: The impact of prior information. Water Resour Res 47(10):W10512. https://doi.org/10.1029/2011WR010409
Schyns JF, Hoekstra AY, Booij MJ (2015) Review and classification of indicators of green water availability and scarcity. Hydrol Earth Syst Sc 19(11):4581–4608. https://doi.org/10.5194/hess-19-4581-2015
Seger M, Girot G, Gaillard H, Bourennane H, Mistou MN, Cousin I (2016) Démarche de cartographie intra parcellaire du réservoir en eau utilisable en contexte de sols hétérogènes à partir de mesures géoélectriques, 10th GEOFCAN Conference, Orléans, France
Seki K, Ackerer P, Lehmann F (2015) Sequential estimation of hydraulic parameters in layered soil using limited data. Geoderma 247:117–128. https://doi.org/10.1016/j.geoderma.2015.02.013
Shangguan W, Hengl T, de Jesus JM, Yuan H, Dai Y (2017) Mapping the global depth to bedrock for land surface modeling. J Adv Model Earth Sy 9(1):65–88. https://doi.org/10.1002/2016MS000686
Shin Y, Mohanty BP, Ines AVM (2013) Estimating effective soil hydraulic properties using spatially distributed soil moisture and evapotranspiration. Vadose Zone J 12(3). https://doi.org/10.2136/vzj2012.0094
Shivhare N, Dikshit PKS, Dwivedi SB (2018) A comparison of SWAT Model calibration techniques for hydrological modeling in the Ganga River watershed. Engineering-London 4(5):643–652. https://doi.org/10.1016/j.eng.2018.08.012
Shrestha DL, Solomatine DP (2006) Machine learning approaches for estimation of prediction interval for the model output. Neural Networks 19(2):225–235. https://doi.org/10.1016/j.neunet.2006.01.012
Simunek J, Angulo-Jaramillo R, Schaap MG, Vandervaere JP, van Genuchten MT (1998) Using an inverse method to estimate the hydraulic properties of crusted soils from tension-disc infiltrometer data. Geoderma 86(1-2):61–81. https://doi.org/10.1016/S0016-7061(98)00035-4
Simunek J, van Genuchten MT, Sejna M (2016) Recent developments and applications of the HYDRUS computer software packages. Vadose Zone Journal 15(7):1539–1663. https://doi.org/10.2136/vzj2016.04.0033
Sinclair TR, Ludlow MM (1986) Influence of soil water supply on the plant water balance of four tropical grain legumes. Aust J Plant Physiol 13:329–341. https://doi.org/10.1071/PP9860329
Singh UK, Ren L, Kang S (2010) Simulation of soil water in space and time using an agro-hydrological model and remote sensing techniques. Agr Water Manage 97(8):1210–1220. https://doi.org/10.1016/j.agwat.2010.03.002
Soil Survey Division Staff (1993) Soil survey manual. US Department of Agriculture
Sommer M, Wehrhan M, Zipprich M, Weller U, Castell WZ, Ehrich S, Tandler B, Selige T (2003) Hierarchical data fusion for mapping soil units at field scale. Geoderma 112(3-4):179–196. https://doi.org/10.1016/S0016-7061(02)00305-1
Sreelash K, Sekhar M, Ruiz L, Tomer SK, Guerif M, Buis S, Durand P, Gascuel-Odoux C (2012) Parameter estimation of a two-horizon soil profile by combining crop canopy and surface soil moisture observations using GLUE. J Hydrol 456:57–67. https://doi.org/10.1016/j.jhydrol.2012.06.012
Sreelash K, Buis S, Sekhar M, Ruiz L, Tomer SK, Guerif M (2017) Estimation of available water capacity components of two-layered soils using crop model inversion: effect of crop type and water regime. J Hydrol 546:166–178. https://doi.org/10.1016/j.jhydrol.2016.12.049
Stoorvogel JJ, Mulder VL, Hendriks CMJ (2019) The effect of disaggregating soil data for estimating soil hydrological parameters at different scales. Geoderma 347:185–193. https://doi.org/10.1016/j.geoderma.2019.04.002
Styc Q, Lagacherie P (2019) What is the Best Inference Trajectory for Mapping Soil Functions: An Example of Mapping Soil Available Water Capacity over Languedoc Roussillon (France). Soil Syst 3:34. https://doi.org/10.3390/soilsystems3020034
Sykes DJ (1964) The availability of soil moisture plants. Retrospective Theses and Dissertations. Paper 3011. https://lib.dr.iastate.edu/rtd/3011
Szabo B, Szatmari G, Takacs K, Laborczi A, Mako A, Rajkai K, Pasztor L (2019) Mapping soil hydraulic properties using random-forest-based pedotransfer functions and geostatistics. Hydrol Earth Syst Sci 23(6):2615–2635. https://doi.org/10.5194/hess-23-2615-2019
Tamari S, Bruckler L, Halbertsma J, Chadoeuf J (1993) A simple method for determining soil hydraulic properties in the laboratory. Soil Sci Soc Am J 57(3):642–651. https://doi.org/10.2136/sssaj1993.03615995005700030003x
Tanaka K, Takizawa H, Kume T, Xu JQ, Tantasirin C, Suzuki M (2004) Impact of rooting depth and soil hydraulic properties on the transpiration peak of an evergreen forest in northern Thailand in the late dry season. J Geophys Res-Atmos 109(D23):10. https://doi.org/10.1029/2004jd004865
Taylor CA, Blaney HF, McLaughlin WW (1934) The wilting-range in certain soils and the ultimate wilting-point. Trans Am Geophys Union 15:436–444. https://doi.org/10.1029/TR015i002p00436
Taylor JA, Jacob F, Galleguillos M, Prevot L, Guix N, Lagacherie P (2013) The utility of remotely-sensed vegetative and terrain covariates at different spatial resolutions in modeling soil and watertable depth (for digital soil mapping). Geoderma 193:83–93. https://doi.org/10.1016/j.geoderma.2012.09.009
Tetegan M, Nicoullaud B, Baize D, Bouthier A, Cousin I (2011) The contribution of rock fragments to the available water content of stony soils: Proposition of new pedotransfer functions. Geoderma 165(1):40–49. https://doi.org/10.1016/j.geoderma.2011.07.001
Thomas N, Schilling KE, Amado AA, Streeter M, Weber L (2017) Inverse modeling of soil hydraulic properties in a twolayer system and comparisons with measured soil conditions. Vadose Zone J 16(2):14. https://doi.org/10.2136/vzj2016.08.0072
Timlin D, Pachepsky Y, Walthall C, Loechel S (2001) The use of a water budget model and yield maps to characterize water availability in a landscape. Soil Tillage Res 58(3-4):219–231. https://doi.org/10.1016/s0167-1987(00)00170-7
Todoroff P, De Robillard F, Laurent JB, IEEE (2010) Interconnection of a crop growth model with remote sensing data to estimate the total available water capacity of soils. In: 2010 IEEE International Geoscience and Remote Sensing Symposium, pp 1641–1644. https://doi.org/10.1109/igarss.2010.5653790
Tomasella J, Pachepsky Y, Crestana S, Rawls WJ (2003) Comparison of two techniques to develop pedotransfer functions for water retention. Soil Sci Soc Am J 67(4):1085–1092. https://doi.org/10.2136/sssaj2003.1085
Toth B, Weynants M, Nemes A, Mako A, Bilas G, Toth G (2015) New generation of hydraulic pedotransfer functions for Europe. Eur J Soil Sci 66(1):226–238. https://doi.org/10.1111/ejss.12192
Van Looy K, Bouma J, Herbst M, Koestel J, Minasny B, Mishra U, Montzka C, Nemes A, Pachepsky YA, Padarian J, Schaap MG, Toth B, Verhoef A, Vanderborght J, van der Ploeg MJ, Weihermuller L, Zacharias S, Zhang YG, Vereecken H (2017) Pedotransfer functions in earth system science: challenges and perspectives. Rev Geophys 55(4):1199–1256. https://doi.org/10.1002/2017rg000581
Vandervaere JP, Vauclin M, Haverkamp R, Cuenca RH (1994) Error analysis in estimating soil-water balance of irrigated fields during the EFEDA experiment. 1. Local standpoint. J Hydrol 156(1-4):351–370. https://doi.org/10.1016/0022-1694(94)90085-x
Varella H, Guerif M, Buis S (2010a) Global sensitivity analysis measures the quality of parameter estimation: the case of soil parameters and a crop model. Environ Modell Softw 25(3):310–319. https://doi.org/10.1016/j.envsoft.2009.09.012
Varella H, Guerif M, Buis S, Beaudoin N (2010b) Soil properties estimation by inversion of a crop model and observations on crops improves the prediction of agro-environmental variables. Eur J Agron 33(2):139–147. https://doi.org/10.1016/j.eja.2010.04.005
Vaudour E, Gomez C, Fouad Y, Lagacherie P (2019) Sentinel-2 image capacities to predict common topsoil properties of temperate and Mediterranean agroecosystems. Remote Sens Environ 223:21–33. https://doi.org/10.1016/j.rse.2019.01.006
Vaysse K, Lagacherie P (2015) Evaluating digital soil mapping approaches for mapping GlobalSoilMap soil properties from legacy data in Languedoc-Roussillon (France). Geoderma Regional 4:20–30. https://doi.org/10.1016/j.geodrs.2014.11.003
Veihmeyer FJ, Hendrickson AH (1927) Soil moisture condition in relation to plant growth. Plant Physiol 2:72–81. https://doi.org/10.1104/pp.2.1.71
Veihmeyer FJ, Hendrickson AH (1931) The moisture equivalent as a measure of the field capacity of soil. Soil Sci 32(3):181–194. https://doi.org/10.1097/00010694-193109000-00003
Veihmeyer FJ, Hendrickson AH (1948) The permanent wilting percentage as a reference for the measurement of soil moisture. Trans Am Geophys Union 29(887-898). https://doi.org/10.1029/TR029i006p00887
Vereecken H, Maes J, Feyen J, Darius P (1989) Estimating the soil moisture retention characteristic from texture, bulk density, and carbon content. Soil Sci 148(6):389–403
Vereecken H, Kaiser R, Dust M, Putz T (1997) Evaluations of the multistep outflow method for the determination of unsaturated hydraulic properties of soils. Soil Sci 162(9):618–631. https://doi.org/10.1097/00010694-199709000-00003
Vereecken H, Weynants M, Javaux M, Pachepsky Y, Schaap MG, van Genuchten MT (2010) Using pedotransfer functions to estimate the van Genuchten-Mualem soil hydraulic properties: a review. Vadose Zone J 9(4):795–820. https://doi.org/10.2136/vzj2010.0045
Vergnes JP, Decharme B, Habets F (2014) Introduction of groundwater capillary rises using subgrid spatial variability of topography into the ISBA land surface model. J Geophys Res-Atmos 119(19):11065–11086. https://doi.org/10.1002/2014jd021573
Viscarra Rossel RA, Lobsey CR, Sharman C, Flick P, McLachlan G (2017) Novel proximal sensing for monitoring soil organic C stocks and condition. Environ Sci Technol 51(10):5630–5641. https://doi.org/10.1021/acs.est.7b00889
Vrugt JA, Bouten W, Weerts AH (2001) Information content of data for identifying soil hydraulic parameters from outflow experiments. Soil Sci Soc Am J 65(1):19–27. https://doi.org/10.2136/sssaj2001.65119x
Vrugt JA, Stauffer PH, Wohling T, Robinson BA, Vesselinov VV (2008) Inverse modeling of subsurface flow and transport properties: a review with new developments. Vadose Zone J 7(2):843–864. https://doi.org/10.2136/vzj2007.0078
Walker E, Monestiez P, Gomez C, Lagacherie P (2017) Combining measured sites, soilscapes map and soil sensing for mapping soil properties of a region. Geoderma 300:64–73. https://doi.org/10.1016/j.geoderma.2016.12.011
Wang RS, Kang YH, Wan SQ, Hu W, Liu SP, Liu SH (2011) Salt distribution and the growth of cotton under different drip irrigation regimes in a saline area. Agric Water Manage 100(1):58–69. https://doi.org/10.1016/j.agwat.2011.08.005
Wang B, Liu DL, Waters C, Yu Q (2018) Quantifying sources of uncertainty in projected wheat yield changes under climate change in eastern Australia. Clim Change 151(2):259–273. https://doi.org/10.1007/s10584-018-2306-z
Weynants M, Montanarella L, Tóth G, Strauss P, Feichtinger F, Cornelis W, et al (2013) European HYdropedological Data Inventory (EU-HYDI). Luxembourg: EUR 26053 EN – Scientific and Technical Research Series. Publications Office of the European Union. https://doi.org/10.2788/5936
Wösten JHM, Pachepsky YA, Rawls WJ (2001) Pedotransfer functions: bridging the gap between available basic soil data and missing soil hydraulic characteristics. J Hydrol 251:123–150. https://doi.org/10.1016/S0022-1694(01)00464-4
Yan YF, Liu JL, Zhang JB, Li XP, Zhao YC (2017) Quantifying soil hydraulic properties and their uncertainties by modified GLUE method. Int Agrophys 31(3):433–445. https://doi.org/10.1515/intag-2016-0056
Yemadje-Lammoglia SK, Bourdin F, Chanzy A Guérif M (2018) Estimating soil water holding capacity using Sentinel2 images and yield map. In: European General Assembly, Vienna, 2018. Copernicus, pp 17546
Zare E, Ahmed MF, Malik RS, Subasinghe R, Huang J, Triantafilis J (2018) Comparing traditional and digital soil mapping at a district scale using residual maximum likelihood analysis. Soil Res 56(5):535–547. https://doi.org/10.1071/sr17220
Zhang XY, Zhang XY, Liu XW, Shao LW, Sun HY, Chen SY (2015) Incorporating root distribution factor to evaluate soil water status for winter wheat. Agric Water Manage 153:32–41. https://doi.org/10.1016/j.agwat.2015.02.001
Acknowledgements
The authors gratefully acknowledge members of the RUEdesSOLS consortium for many inspiring discussions.
Funding
This study was conducted in the framework of the RUEdesSOLS project, financed by the French Agence Nationale de la Recherche, through the grants ANR-14-CE01-0011-01, ANR-14-CE01-0011-02, ANR-14-CE01-0011-04 and ANR-14-CE01-0011-08.
Author information
Authors and Affiliations
Contributions
All of the authors contributed equally to the design and writing of the review.
Corresponding authors
Ethics declarations
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Conflict of interest
The authors declare no conflict of interest.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Cousin, I., Buis, S., Lagacherie, P. et al. Available water capacity from a multidisciplinary and multiscale viewpoint. A review. Agron. Sustain. Dev. 42, 46 (2022). https://doi.org/10.1007/s13593-022-00774-8
Accepted:
Published:
DOI: https://doi.org/10.1007/s13593-022-00774-8