
Abstract
The quantitative evaluation of bolt pre-load is crucial for the maintenance and prevention of accidents in bolt-connected structures. This study introduces the coda wave interferometry (CWI) method and the nonlinear coda wave interferometry (NCWI) method for quantitative evaluation of bolt pre-load. Experimental tests across three different scales of bolt pre-load changes were conducted on a bolt to compare the performances of CWI and NCWI in the quantitative evaluation of bolt pre-load. The results demonstrate that both CWI and NCWI can effectively characterize changes in bolt pre-load. For CWI, the relative velocity change (∆v/v) exhibits a linear relationship with the bolt pre-load. Meanwhile, for NCWI, the effective nonlinear level, denoted as \({\alpha }_{\Delta v/v}\), demonstrates a quadratic dependence on the bolt pre-load. In CWI, the calculation of ∆v/v is dependent on the correlation coefficient between the coda waves of signals before and after bolt pre-load changes. It is prone to failure when there are significant changes in bolt pre-load. Conversely, NCWI demonstrates enhanced robustness in evaluating bolt pre-load changes across a range of magnitudes.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Owing to its convenient construction and high reliability, bolted connections have been extensively applied in civil engineering for wood structures [1, 2], steel structures [3, 4], and steel–concrete composite structures [5, 6]. The looseness of bolt connections may result in the failure of the bolted joint, consequently degrade the designed function of the entire structural system [7]. It is a crucial task to detect bolt pre-load for ensuring the safety of bolts connected structure [8].
To date, various ultrasonic nondestructive testing methods have been developed [9,10,11,12,13,14,15,16,17]. Ultrasonic testing stands out as an excellent method for detecting bolt looseness due to its high sensitivity to variations in the bolt contact interface [18, 19]. However, traditional ultrasonic techniques utilize direct wave packet for damage detection and condition evaluation, which limits the sensitivity of this method [20]. Recently, coda wave techniques, utilizing the latter arrivals of the recorded ultrasonic waveforms (i.e. coda waves) have attracted much attenuation in the field of structural health monitoring due to their high sensitivity [21]. Coda waves are the scattered and reflected waves by the scatters and boundaries, which was first used in the field of geophysics. Snieder et al. [22] innovatively introduced coda waves into nondestructive testing (NDT) field to infer changes in media over time. Coda wave interferometry (CWI) can achieve highly precise measurements of relative velocity changes as low as 0.001% [23]. Then, the coda wave method has been widely utilized to detect changes in mechanical properties [24, 25], temperature-induced stress variations [26, 27] and small-scale damages [28, 29] of structures. In terms of bolt looseness detection, Hei et al. [30] employed the coda wave energy to reflect the change of bolt connection states, while Chen et al. [31, 32] conducted a comparative analysis between the CWI and the transmission energy-based index, demonstrating that CWI can significantly improve the accuracy of bolt pre-load evaluation, resulting in an ultimate pre-load resolution of 0.331%.
These studies demonstrate that the rough and cratered characteristics of the bolt contact interface enable it to function as a natural interferometer, scattering propagation waves. CWI possesses high sensitivity to sense variations in the bolt contact interface. However, when bolt pre-load changes dramatically, the waveforms undergo significant alterations, making it inadequate for extracting the real relative velocity change and characterizing bolt looseness [33]. The stepwise coda wave interferometry (SCWI) was proposed to address this issue by dividing the entire process into steps rather than comparing the baseline signal with the final signal [34, 35]. To this end, a detailed breakdown of the process is required, involving extensive measurements during the loosening of bolts. Furthermore, both CWI and SCWI require baseline signals obtained from the health state. These requirements are impractical in field engineering.
To circumvent the aforementioned deficiencies of conventional coda wave techniques, the nonlinear coda interferometry (NCWI) is introduced for bolt looseness detection. In this method, a sweep low-frequency pump wave is employed to induce transient changes and the nonlinear wave-mixing effects arising from the rough and cratered bolt interface. NCWI employs the multiple scattered coda waves at the bolt interface with high sensitivity to perceive the nonlinearity changes [36]. After the low-frequency components are filtered out, any differences between the coda waves produced with and without the pump wave can be attributed solely to the nonlinear frequency mixing induced by the contact acoustical nonlinearity, indicating a variation in bolt pre-load. CWI is employed to calculate phase shifting caused by the pump wave rather than variations in pre-load. Therefore, the detection of bolt looseness with NCWI is not dependent on the baseline-signal obtained from the health state and is not affected by inspection intervals. The effectiveness of this method has been verified in the detection of thermal damage in glass [37, 38], concrete cracking and self-healing [39,40,41]. To the best of the authors’ knowledge, the evaluation of bolt looseness by NCWI has not been explored in published research. The feasibility of this method for assessing bolt pre-load requires further investigation.
In this study, both CWI and NCWI are introduced for quantitative evaluation of bolt pre-load. For the evaluation of bolt pre-load based on NCWI, the nonlinear wave-mixing effects in the bolt contact interface are induced by pump waves with the amplification factor increasing in multiple steps. CWI is employed to extract information about the nonlinear feature variations of the bolt contact interface related to pre-load. For the evaluation of bolt pre-load based on CWI, the waves obtained without pump waves under each load level are extracted to analyze the relative velocity change of the coda waves. Experimental tests with three different loosening scales are performed on a bolt to compare the performance of CWI and NCWI.
2 Methodology
2.1 Coda wave interferometry
According to the path superposition principle [32], the wavefield \(u\left(t\right)\) can be expressed as the sum of waves from all possible paths:
where \({S}_{p}\left(t\right)\) represents all possible propagation paths of the wavefield.
This expression shows that the wavefield is a superposition of waves propagating along all possible scattering paths. These paths include direct waves, simply scattered waves and multiple scattered waves. The perturbation will lead to a phase shift in the time domain.
where \({k}_{w}\) is the wavenumber, \(l\) is the wave propagation distance of \(p\) which is one of wave paths, \(\delta\) represents the minor change of wave propagation distance.
The perturbed wavefield can be expressed as
where \({\tau }_{p}\) is the time perturbation.
According to Eq. (3), the \({\tau }_{p}\) mainly depends on the scattering path \(p\), indicating that the time shifts of the wave path before and after the perturbation are related to the changes of \(p\). A greater number of scattering paths will result in the increase of time shift in coda waves.
The stretching method is employed to measure time shift of the coda waves. Stretching method simulates relative velocity change ∆v/v by stretching or compressing the initial signal \({u}_{o}\left(t\right)\) along the time axis with a stretching factor \(\alpha\). The correlation coefficient \({K}_{cc}\left(\alpha \right)\) between \({u}_{o}\left(t\left(1+\alpha \right)\right)\) and \({u}_{i}\left(t\right)\) is calculated at a given time window [\({t}_{0},{t}_{1}\)]. Here, \({u}_{i}\left(t\right)\) represents the signal that after disturbance [24]:
The \({\alpha }_{max}\) that maximizes \({K}_{cc}\left(\alpha \right)\) corresponds to the actual relative velocity change ∆v/v, which can be expressed as
The correlation between the signals before and after perturbation is evaluated based on the maximum \({K}_{cc}\left({\alpha }_{max}\right)\) in Eq. (5), denoted as CC. When the CC value is too low, the stretching method becomes invalid.
In this research, the CWI method is utilized in two aspects: (1) It is used to calculate the effective non-linearity level in NCWI; (2) It is employed for the measurement of bolt pre-load changes directly.
2.2 Nonlinear coda wave interferometry
The NCWI method is an extension of the CWI method within the nonlinear regime [36]. As is well known, nonlinear acoustic methods exhibit high sensitivity in monitoring the evolution of internal contacts (manifested as clapping, sliding, friction, etc.) within elastic solid materials. From a microscopic perspective, the interface of a bolt exhibits roughness and irregularities. In bolted interfaces, incomplete contact is the primary element constituting the source of nonlinearities. The contact acoustic nonlinearity is engendered at the bolted joint interface, when pump waves modulate probing waves [42]. It has been proven that bolt pre-load changes can be monitored with high sensitivity by utilizing contact acoustic nonlinearity [42, 43]. On the other hand, rough and irregular bolt interfaces can act as natural interferometers, generating multi-scattering effects of waves [32]. By analysing the latter arriving portion of the receiver waves, the nonlinear change induced by pump wave can be captured with high precision.
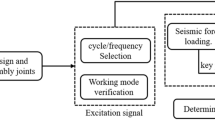
In this study, the low-frequency pump waves with progressively increasing amplitude are applied on the sample. The rough and cratered bolt interface results in the nonlinear acoustics modulation of the probe wave, which can be observed as a phase shift of coda wave before and after the pump waves. CWI is employed to extract phase shift information. The variation in bolt pre-load can be evaluated through the effective nonlinear level quantized by the slope of the fitting curve of coda time shift versus pump wave amplification factor. The overall flowchart of the NCWI for detecting bolt looseness is shown in Fig. 1.

The flowchart of the NCWI for quantitative evaluation of bolt pre-load
3 Experiment
3.1 Specimen and experimental setup
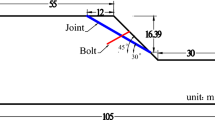
The specimen consists of two three-hole steel plates (280 × 230 × 10 mm) joined by three pairs of bolts, nuts and washers, as shown in Fig. 2. The diameter of the bolt is 16 mm and the strength grade is 8.8. The pre-load of these bolts in the tight state is 75 kN. During the test, the No. 1 and No. 3 bolts were kept in a tightened state, and the proposed method was verified by controlling the pre-load of the No. 2 bolt.

Schematic diagram of specimen
There are two circuits in the setup of NCWI: pump circuit and probe circuit. The transducer with centre frequency of 20 kHz was employed as the pump source, and a 250 kHz transducer functioned as an actuator to emit the probe wave. A PZT transducer, packaged and fabricated by stainless steel shell, served as a sensor to detect the waveforms of the propagated waves before and after the perturbation.
The schematic diagram of circuit setups is shown in Fig. 3. The red line is connected to the pump circuit, which includes the Channel 1 of a Function generator (Model AFG31022- Tektronix), a power amplifier (Model ATA7015-Aigtek). The pump amplification factor was adjusted manually, with the capability to reach up to 1000 times. The green line represents the probe circuit, where probe waves were emitted by channel 2 of a Function generator and amplified by a power amplifier (Model ATA2041-Aigtek).

The circuits of NCWI
The reverberation waveforms formed by the pump and probe were detected by the receiver, as shown by the blue line in Fig. 3. A pre-amplifier (OPLABBOX 2.0) and PC installed with NI data acquisition (NI PXI-5105) were employed for preprocessing and acquiring reverberation signals. In addition, an oscilloscope (Keysight DSOX2002A) was employed to monitor the amplified pump wave and probe wave shape to prevent distortion.
In this study, the pre-load in the bolt was directly set by adjusting the force applied by the testing machine. Traditional torque wrenches have insufficient accuracy to simulate the small perturbations of bolt preload. Moreover, torque wrenches can only be used to increase torque. It is difficult to precisely control the residual torque when torque wrenches are used to loosen bolts. Therefore, we designed a bolt assembly in our experiment, which consists of a threadless rod, a threadless nut, a pad with a hole, and a high-accuracy microcomputer control electronic universal testing machine. The maximum loading force of the testing machine is 100 kN, with a force measurement accuracy of ± 0.5% or less of the displayed value. The pre-loads were effectively applied to the bolted joint by compressing the bolt head. The photograph of the experimental apparatuses is shown in Fig. 4.

The photograph of experimental apparatuses. a Ultrasonic apparatus, b universal test machine and Specimen
3.2 Experimental procedures
In this experimental test, three testing scenarios were implemented to simulate the loosening of bolts, each with different loosening interval scales, as indicated in Table 1. The initial tight states for all cases were set at 75 kN. The looseness intervals for Case 1, Case 2, and Case 3 were 5 kN, 3 kN, and 1 kN, respectively. Initially, the bolt pre-load was adjusted to reach the desired force. Once the target pre-load was achieved, it was maintained stable for a duration of ten minutes. Subsequently, the NCWI test was conducted. Finally, the pre-load was adjusted, and the aforementioned two steps were repeated until all cases were tested.
The NCWI steps comprise three primary parts: (1) emit pump signal, (2) emit probe signal and receive reverberation signal, and (3) vary the pump amplitude and repeat steps (1) and (2) until all pump steps are tested. The flowchart of the NCWI steps is schematically shown in Fig. 5.

The flowchart of the NCWI
To induce nonlinear acoustic modulation, a pump wave with a lower frequency and high power was applied on the specimen. The pump signal had a duration of 10 ms, and its frequency was linearly swept within the range of 20–50 kHz. Right after the pump sweep concludes, the excitation signal for the probe source was sent to the specimen which was a chirp with a duration of 0.4 ms and a frequency that linearly varies from 200 to 500 kHz. Simultaneously, signal acquisition was triggered. A reverberation signal was recorded for a sample count of 55,001 with a sampling rate of 10 MHz. To improve the signal-to-noise ratio, an average of 64 successive acquisitions was established as one coda record. The interval between trigger records was 100 ms. During the experiment process, the amplitude of the probing signal remained constant, while the pump signal amplitude was adjusted by manually changing the amplification factor, ranging from 0 to 900 with increments of 100. A full NCWI test lasted approximately 5 min. To eliminate temperature effects, the ambient temperature was kept at 22 ℃ by air conditioner throughout all experiments.
4 Experimental results
4.1 Pre-processing of reverberation signals
The frequency response of reverberation signals in Case 3 at 50 kN (the pump amplification factor of 0, 300, 600, and 900) is shown in Fig. 6. In these signals, in addition to the essential high-frequency probe wave segment, there is also a notably strong low-frequency component. It is evident that as pump amplification factor increases, the low-frequency component gradually intensifies, while the high-frequency segment gradually diminishes. This phenomenon demonstrates that the incorporation and gradual strengthening of the pump wave result in nonlinear modulation of the probe wave.

The frequency responds of reverberation signals in Case 3 at 50 kN (the pump amplification factor of 0, 300, 600, and 900)
Fourth-order Butterworth high-pass filter with the cut-off frequency of 200 kHz is employed for filtering out the corresponding low-frequency component in the reverberation signals. Signals in Case 3 at 50 kN (the pump amplification factor of 0 and 900) are shown in Fig. 7. It becomes evident that the direct wave experiences minimal phase alteration before and after the pump, whereas the coda wave exhibits significant phase delay. This observation demonstrates the viability of employing the coda wave method for analyzing the nonlinearity induced by the pump wave.

The waveforms in Case 3 at 50 kN (the pump amplification factor of 0 and 900)
To obtain reliable stretching calculation results, it is essential to select an appropriate time window. If the time window is extended excessively, the precision of the stretching calculation diminishes. Conversely, if it is contracted excessively, the calculation results can become unreliable. In this study, the time window [\({t}_{0},{t}_{1}\)] satisfies the following criteria [33]:
where the \({t}^{*}\) is the mean free time of two consecutive scattering events, and is calculated as follows:
where \(v\) is the energy transport velocity, and D is the diffusivity coefficient, which is determined through the diffusion approximation applied to a scattered ultrasonic signal [44]:
where \(E\left(r,t\right)\) is to the signal theoretical intensity, \({U}_{0}\) is the magnitude of the source pulse, \(d\) is the dimensions, r is the distance between the probe actuator and receiver, and \(\upsigma\) is the dissipation parameter. Taking the logarithm of both sides of the above equation, the diffusion fitting of a filtered signal example is presented in Fig. 8.

Energy diffusion as a function of time
The r is the distance between the probe sensor and the receiver, approximately 0.102 m. The value of diffusivity coefficient is estimated to be 6.1751 m2/s. Within the bolt interface, wave propagation primarily occurs through shear waves, with a wave speed of approximately 3200 m/s. According to Eq. (9), the mean free propagation time \({t}^{*}\) is 1.81 µs. Longer time windows have higher robustness, while shorter time windows have greater sensitivity. Therefore, taking into account the experimental setup and the overall waveform, the ultrasonic waves within the time window of [2.45, 2.50] ms are selected as the coda waves. An example overall waveform and selected time window is shown in Fig. 9.

The overall waveform and selected time window
4.2 Results of CWI techniques
In this section, CWI is employed to assess bolt pre-load status. The waves obtained in the first step of NCWI tests under each load level are extracted for conventional coda analysis. These waves are not affected by pump waves. The coda waveforms in Case 1 are presented in Fig. 10. For the coda wave in the time window of [2.45, 2.50] ms, the waveforms appear consistent, but discernible time shifts are visible to the naked eye. By comparing Fig. 11, it becomes evident that the time shifts progressively lengthen as the unloading interval increases. The time shift of the coda wave can be employed to reveal alterations in pre-load.

The coda waves in Case 1 (without pump)

∆v/v and CC vs. pre-load calculated by conventional CWI in a Case 1, b Case 2, c Case 3
To achieve a precise and quantitative evaluation of the time shift in the coda wave, calculations are performed for both \(\Delta v/v\) and CC, as shown in Fig. 11. As for Case 1, the \(\Delta v/v\) values increase gradually, while the CC progressively decrease. Even after reducing the bolt pre-load force by 5 kN, the CC value remained at 0.6700. But, as for Case 2 and Case 3, due to excessive bolt loosening leading to extremely low correlation coefficients, errors occur, and the \(\Delta v/v\) values in Fig. 11b and c exhibit irregular increases and decreases. As the bolts are gradually loosened in 3 kN increments, a significant abrupt change occurs at 66 kN in relative velocity fluctuations. This change is accompanied by a notable decrease in CC, as shown in Fig. 11b, where it reaches 0.3601. In Fig. 11c, this phenomenon becomes more pronounced when loosened at 5 kN intervals, with an abrupt change occurring after two loosening increments. The result can be attributed to the substantial difference between the baseline signal and the final signal when loosening occurs at larger intervals. If conventional CWI is continued to be used under such conditions, it may lead to errors.
Stepwise CWI is introduced to accurately determine the relative velocity change induced by bolt loosening. In this method, the final signal will not be employed for comparison with the baseline signal. Instead, it involves multiple steps to analyze the relative velocity change at each individual step. Finally, the results from each step are accumulated to get total relative velocity change. It is worth noting that this accumulation is not a simple direct addition. It is calculated by the following formula [35]:
where \({\alpha }_{i}\) is the stretching factor at each step \(i\).
The stepwise CWI results for Case 1, Case 2 and Case 3 calculated by stepwise CWI are shown in Fig. 12. In the figures, the red dotted line represents the linear fit curve. It is evident that as the bolt is loosened, ∆v/v exhibits a consistent linear decrease. The R2 values of the fitting curves are all greater than 0.9788, indicating an approximately linear relationship between the ∆v/v and the bolt looseness. In addition, the slope of the linear fitting curve increases as the bolt looseness interval increases.

∆v/v vs. pre-load calculated by stepwise CWI in a Case 1, b Case 2, c Case 3
While the above analysis indicates that stepwise CWI was effectively employed to monitor bolt per-load changes in the tests of this study, the implementation of this technology requires meticulous inspection intervals. When bolt pre-load changes excessively, there is a significant discrepancy between the signals obtained from two adjacent inspection intervals. This discrepancy results in a correlation coefficient that is too low to employ the stretching method. Signals with intervals of 10 kN are extracted from Case 3 for analysis, and the results are presented in Fig. 13. It is evident from Fig. 13 that \(\Delta v/v\) varies drastically for a 10 kN looseness interval. The CC values of the two signals before and after the loosening interval of 10 kN are very low, with the lowest value being only 0.4716. This indicates that these two signals are no longer suitable for stretch calculation. As a result, SCWI loses its effectiveness in this context.

∆v/v and CC values calculated by stepwise CWI with 10 kN interval in Case 3
4.3 Results of the NCWI technique
Following the NCWI steps, analyses are performed for all cases. Due to space limitations, only the coda waveforms in Case 3 at 50 kN (with pump amplification factor of 0, 200, 400, 600, 800, 900) are presented, as shown in Fig. 14. It can be observed that as the pump amplification factor increases, the waveforms shift to the right, indicating that nonlinear modulation has taken place due to the irregular interface of bolts.

The coda waveforms in Case 3 at 50 kN (the pump amplification factor of 0, 200, 400, 600, 800 and 900)
The ∆v/v values in Case 3 at 75 kN, 65 kN, 55 kN, 45 kN are presented in Fig. 15 to demonstrate the developing trends of ∆v/v under gradually increasing pump wave excitation. It can be seen that ∆v/v vs. pump step number exhibits a linear dependence. The R2 values of the fitting curves in Fig. 15 are greater than 0.9904, indicating an approximately linear relationship between the time shifts of coda waves and the pump step number. Additionally, with the increase of bolt looseness, the slope of the fitted curve gradually decreases. Therefore, the effective nonlinear level quantized by the fitting curve slope of coda time-shift vs. pump step number is employed as an indicator for detecting bolt looseness.

∆v/v vs. pump step number in Case 3 at 75 kN, 65 kN, 55 kN, 45 kN
To put the analysis into a quantitative manner, \({\alpha }_{\Delta v/v}\) vs. bolt pre-load for Case 1, 2 and 3 are shown in Fig. 16. It can be observed that the effective nonlinear level \({\alpha }_{\Delta v/v}\) exhibits a quadratic decreasing trend with the decrease in bolt pre-load. The R2 for the fitted curve exceeds 0.9609. The effective level \({\alpha }_{\Delta v/v}\) can effectively characterize changes in bolt pre-load.

αΔv/v vs. bolt pre-load for a Case 1, b Case 2, c Case 3
Furthermore, it can be observed that whether it is a minor 1 kN pre-load loosening or larger 5 kN interval variations in bolt pre-load, \({\alpha }_{\Delta v/v}\) demonstrates excellent resolution. It enables the quantitative evaluation of bolt looseness regardless of the scale of the pre-load change interval. The most noteworthy aspect is that the acquisition of \({\alpha }_{\Delta v/v}\) does not require a baseline signal obtained from the health state as a reference. For each bolt looseness state, \({\alpha }_{\Delta v/v}\) is independent and obtained from the relative velocity changes caused by the progressively increasing amplitudes of pump waves. This represents a significant improvement over conventional CWI methods.
5 Conclusions
A comparative study on the quantitative evaluation of bolt pre-load using CWI and NCWI is conducted through experimental tests with three different looseness scales. In NCWI, the evaluation of bolt pre-load is based on the nonlinear wave-mixing effects arising from the rough and cratered contact interface. CWI is employed for extracting the coda wave time shift dependent on pump amplitude, which is associated with the effective nonlinear parameters of the contact interface. The effective nonlinear level, quantized by the slope of the fitting curve of relative velocity change versus the pump step number is utilized to quantitatively evaluate bolt pre-load. The CWI-based pre-load evaluation is conducted by extracting receiver waves without pump waves from the NCWI test. The results indicate that both CWI and NCWI can effectively quantify changes in bolt pre-load. The \(\Delta v/v\) extracted through CWI, shows a linear fitting relationship with pre-load. For NCWI, the \(\Delta v/v\) induced by pump waves exhibits a linear fitting relationship with the pump wave amplification factor. The effective nonlinear level, quantified by the slope of linear fitting, exhibits a quadratic fitting relationship with pre-load. It is noteworthy that, since CWI relies on the correlation between signals before and after perturbation, it can only be successfully implemented under carefully designed inspection process. NCWI can quantitatively evaluate bolt pre-load change without relying on baseline signals obtained from health state and exhibits strong adaptability when faced with various bolt looseness scales.
The temperature variations have significant impact on the CWI-based method [23]. The future work will focus on studying temperature compensation methods for the NCWI bolt preload detection. Additionally, NCWI detection was performed only for a single bolt looseness in this study. The practical engineering scenarios may involve the simultaneous looseness of multiple bolts. Machine learning methods have powerful feature extraction capabilities [45,46,47]. The approach of combining machine learning with NCWI testing for multi-bolt loosening detection is worthy of further investigation.
Data availability
The data that support the findings of this study are available from the author upon reasonable request.
References
Wang XT, Zhu EC, Niu S, Wang HJ (2021) Analysis and test of stiffness of bolted connections in timber structures. Constr Build Mater 303:124495. https://doi.org/10.1016/j.conbuildmat.2021.124495
Wang M, Song X, Gu X et al (2015) Rotational behavior of bolted beam-to-column connections with locally cross-laminated glulam. J Struct Eng 141:04014121. https://doi.org/10.1061/(ASCE)ST.1943-541X.0001035
Zhang H, Zhu X, Li Z, Yao S (2019) Displacement-dependent nonlinear damping model in steel buildings with bolted joints. Adv Struct Eng 22:1049–1061. https://doi.org/10.1177/1369433218804321
Shaheen MA, Atar M, Cunningham LS (2023) Enhancing progressive collapse resistance of steel structures using a new bolt sleeve device. J Constr Steel Res 203:107843. https://doi.org/10.1016/j.jcsr.2023.107843
Sadeghi F, Yu Y, Zhu X, Li J (2021) Damage identification of steel-concrete composite beams based on modal strain energy changes through general regression neural network. Eng Struct 244:112824. https://doi.org/10.1016/j.engstruct.2021.112824
Talaei S, Zhu X, Li J et al (2023) Transfer learning based bridge damage detection: leveraging time-frequency features. Structures 57:105052. https://doi.org/10.1016/j.istruc.2023.105052
Thoppul SD, Finegan J, Gibson RF (2009) Mechanics of mechanically fastened joints in polymer–matrix composite structures—a review. Compos Sci Technol 69:301–329. https://doi.org/10.1016/j.compscitech.2008.09.037
Samantaray SK, Mittal SK, Mahapatra P, Kumar S (2018) An impedance-based structural health monitoring approach for looseness identification in bolted joint structure. J Civil Struct Health Monit 8:809–822. https://doi.org/10.1007/s13349-018-0307-2
Gulizzi V, Rizzo P, Milazzo A, La Malfa RE (2015) An integrated structural health monitoring system based on electromechanical impedance and guided ultrasonic waves. J Civil Struct Health Monit 5:337–352. https://doi.org/10.1007/s13349-015-0112-0
Gao M, Hu X, Ng C-T et al (2024) Numerical and experimental investigations on quasi-static component generation of longitudinal wave propagation in isotropic pipes. Ultrasonics 138:107237. https://doi.org/10.1016/j.ultras.2023.107237
Mustapha S, Lu Y, Li J, Ye L (2014) Damage detection in rebar-reinforced concrete beams based on time reversal of guided waves. Struct Health Monit 13:347–358. https://doi.org/10.1177/1475921714521268
Yang Y, Ng C-T, Kotousov A (2019) Bolted joint integrity monitoring with second harmonic generated by guided waves. Struct Health Monit 18:193–204. https://doi.org/10.1177/1475921718814399
Krause M, Dackermann U, Li J (2015) Elastic wave modes for the assessment of structural timber: ultrasonic echo for building elements and guided waves for pole and pile structures. J Civil Struct Health Monit 5:221–249. https://doi.org/10.1007/s13349-014-0087-2
Li J, Lu Y, Ma H (2023) Linear and nonlinear guided wave based debonding monitoring in CFRP-reinforced steel structures. Constr Build Mater 400:132673. https://doi.org/10.1016/j.conbuildmat.2023.132673
Wang F, Mobiny A, Van Nguyen H, Song G (2021) If structure can exclaim: a novel robotic-assisted percussion method for spatial bolt-ball joint looseness detection. Struct Health Monit 20:1597–1608. https://doi.org/10.1177/1475921720923147
Kaphle M, Tan ACC, Thambiratnam DP, Chan THT (2012) Identification of acoustic emission wave modes for accurate source location in plate-like structures. Struct Control Health Monit 19:187–198. https://doi.org/10.1002/stc.413
Hussin M, Chan THT, Fawzia S, Ghasemi N (2020) Identifying the prestress force in prestressed concrete bridges using ultrasonic technology. Int J Str Stab Dyn 20:2042014. https://doi.org/10.1142/S0219455420420146
Du F, Wu S, Xing S et al (2023) Temperature compensation to guided wave-based monitoring of bolt loosening using an attention-based multi-task network. Struct Health Monit 22:1893–1910. https://doi.org/10.1177/14759217221113443
Cui E, Zuo C, Fan M, Jiang S (2021) Monitoring of corrosion-induced damage to bolted joints using an active sensing method with piezoceramic transducers. J Civil Struct Health Monit 11:411–420. https://doi.org/10.1007/s13349-020-00457-6
Li X, Liu G, Sun Q et al (2023) Bolt tightness monitoring using multiple reconstructed narrowband Lamb waves combined with piezoelectric ultrasonic transducer. Smart Mater Struct 32:105017. https://doi.org/10.1088/1361-665X/acf2d2
Sun X, Zhang M, Gao W et al (2023) A novel method for steel bar all-stage pitting corrosion monitoring using the feature-level fusion of ultrasonic direct waves and coda waves. Struct Health Monit 22:714–729. https://doi.org/10.1177/14759217221094466
Snieder R, Grêt A, Douma H, Scales J (2002) Coda wave interferometry for estimating nonlinear behavior in seismic velocity. Science 295:2253–2255. https://doi.org/10.1126/science.1070015
Zhang Y, Abraham O, Tournat V et al (2013) Validation of a thermal bias control technique for coda wave interferometry (CWI). Ultrasonics 53:658–664. https://doi.org/10.1016/j.ultras.2012.08.003
Xie F, Li W, Zhang Y (2019) Monitoring of environmental loading effect on the steel with different plastic deformation by diffuse ultrasound. Struct Health Monit 18:602–609. https://doi.org/10.1177/1475921718762323
Payan C, Garnier V, Moysan J, Johnson PA (2009) Determination of third order elastic constants in a complex solid applying coda wave interferometry. Appl Phys Lett 94:011904. https://doi.org/10.1063/1.3064129
Wunderlich C, Niederleithinger E (2013) Evaluation of temperature influence on ultrasound velocity in concrete by coda wave interferometry. In: Güneş O, Akkaya Y (eds) Nondestructive testing of materials and structures. Springer, Netherlands, Dordrecht, pp 227–232
Grêt A, Snieder R, Scales J (2006) Time-lapse monitoring of rock properties with coda wave interferometry: time-lapse monitoring of rock properties. J Geophys Res. https://doi.org/10.1029/2004JB003354
Schurr DP, Kim J-Y, Sabra KG, Jacobs LJ (2011) Damage detection in concrete using coda wave interferometry. NDT and E Int 44:728–735. https://doi.org/10.1016/j.ndteint.2011.07.009
Liu S, Bundur ZB, Zhu J, Ferron RD (2016) Evaluation of self-healing of internal cracks in biomimetic mortar using coda wave interferometry. Cem Concr Res 83:70–78. https://doi.org/10.1016/j.cemconres.2016.01.006
Hei C, Luo M, Gong P, Song G (2020) Quantitative evaluation of bolt connection using a single piezoceramic transducer and ultrasonic coda wave energy with the consideration of the piezoceramic aging effect. Smart Mater Struct 29:027001. https://doi.org/10.1088/1361-665X/ab6076
Chen D, Shen Z, Fu R et al (2022) Coda wave interferometry-based very early stage bolt looseness monitoring using a single piezoceramic transducer. Smart Mater Struct 31:035030. https://doi.org/10.1088/1361-665X/ac5128
Chen D, Huo L, Song G (2022) High resolution bolt pre-load looseness monitoring using coda wave interferometry. Struct Health Monit 21:1959–1972. https://doi.org/10.1177/14759217211063420
Chen D, Zhang N, Huo L, Song G (2023) Full-range bolt preload monitoring with multi-resolution using the time shifts of the direct wave and coda waves. Struct Health Monit. https://doi.org/10.1177/14759217231158297
Zotz-Wilson R, Boerrigter T, Barnhoorn A (2019) Coda-wave monitoring of continuously evolving material properties and the precursory detection of yielding. J Acoust Soc Am 145:1060–1068. https://doi.org/10.1121/1.5091012
Hu H, Li D, Wang L et al (2021) An improved ultrasonic coda wave method for concrete behavior monitoring under various loading conditions. Ultrasonics 116:106498. https://doi.org/10.1016/j.ultras.2021.106498
Zhang Y, Tournat V, Abraham O et al (2013) Nonlinear mixing of ultrasonic coda waves with lower frequency-swept pump waves for a global detection of defects in multiple scattering media. J Appl Phys 113:064905. https://doi.org/10.1063/1.4791585
Zhang Y, Tournat V, Abraham O et al (2017) Nonlinear coda wave interferometry for the global evaluation of damage levels in complex solids. Ultrasonics 73:245–252. https://doi.org/10.1016/j.ultras.2016.09.015
Smagin N, Trifonov A, Bou Matar O, Aleshin VV (2020) Local damage detection by nonlinear coda wave interferometry combined with time reversal. Ultrasonics 108:106226. https://doi.org/10.1016/j.ultras.2020.106226
Legland J-B, Zhang Y, Abraham O et al (2017) Evaluation of crack status in a meter-size concrete structure using the ultrasonic nonlinear coda wave interferometry. J Acoust Soc Am 142:2233–2241. https://doi.org/10.1121/1.5007832
Hilloulin B, Legland J-B, Lys E et al (2016) Monitoring of autogenous crack healing in cementitious materials by the nonlinear modulation of ultrasonic coda waves, 3D microscopy and X-ray microtomography. Constr Build Mater 123:143–152. https://doi.org/10.1016/j.conbuildmat.2016.06.138
Hilloulin B, Zhang Y, Abraham O et al (2014) Small crack detection in cementitious materials using nonlinear coda wave modulation. NDT and E Int 68:98–104. https://doi.org/10.1016/j.ndteint.2014.08.010
Zhang Z, Liu M, Su Z, Xiao Y (2016) Quantitative evaluation of residual torque of a loose bolt based on wave energy dissipation and vibro-acoustic modulation: a comparative study. J Sound Vib 383:156–170. https://doi.org/10.1016/j.jsv.2016.07.001
Zhao N, Linsheng H, Song G (2023) Vibration acoustic modulation for bolt looseness monitoring based on frequency-swept excitation and bispectrum. Smart Mater Struct 32:034004. https://doi.org/10.1088/1361-665X/acb579
Epple N (2018) From seismology to bridge monitoring: coda wave interferometry. (Master's thesis), Delft University of Technology
Yu Y, Hoshyar AN, Samali B et al (2023) Corrosion and coating defect assessment of coal handling and preparation plants (CHPP) using an ensemble of deep convolutional neural networks and decision-level data fusion. Neural Comput Applic 35:18697–18718. https://doi.org/10.1007/s00521-023-08699-3
Yu Y, Zhang C, Xie X et al (2023) Compressive strength evaluation of cement-based materials in sulphate environment using optimized deep learning technology. Develop Built Environ 16:100298. https://doi.org/10.1016/j.dibe.2023.100298
Chen Y, Zhu L, Gao Z et al (2024) Multi-bolt looseness positioning using multivariate recurrence analytic active sensing method and MHAMCNN model. Struct Health Monit. https://doi.org/10.1177/14759217241243111
Acknowledgements
The second author would like to express appreciation to the China Scholarship Council (CSC) for supporting the scholarship that enabled the completion of this work.
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions. This study was funded by the National Key Research and Development Program of China (Grant No. 2021YFB2600900), the Science and Technology Innovation Program of Hunan Province (Grant No. 2023RC3142), and Australian Research Council (Grant No. IH210100048).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, L., Yi, S., Sun, X. et al. Quantitative evaluation of bolt pre-load using coda wave interferometry and nonlinear coda wave interferometry: a comparative study. J Civil Struct Health Monit (2024). https://doi.org/10.1007/s13349-024-00815-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13349-024-00815-8