
Abstract
Passive acoustic monitoring is a promising method for surveying wildlife populations that are easier to detect acoustically than visually. When animal vocalisations can be uniquely identified on an array of sensors, the potential exists to estimate population density through acoustic spatial capture–recapture (ASCR). However, sound classification is imperfect, and in some situations, a high proportion of sounds detected on just a single sensor (‘singletons’) are not from the target species. We present a case study of bowhead whale calls (Baleana mysticetus) collected in the Beaufort Sea in 2010 containing such false positives. We propose a novel extension of ASCR that is robust to false positives by truncating singletons and conditioning on calls being detected by at least two sensors. We allow for individual-level detection heterogeneity through modelling a variable sound source level, model inhomogeneous call spatial density, and include bearings with varying measurement error. We show via simulation that the method produces near-unbiased estimates when correctly specified. Ignoring source-level variation resulted in a strong negative bias, while ignoring inhomogeneous density resulted in severe positive bias. The case study analysis indicated a band of higher call density approximately 30 km from shore; 59.8% of singletons were estimated to have been false positives.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In recent decades, passive acoustic monitoring (PAM) has increasingly been used to study both terrestrial (Sugai et al. 2019) and marine animals, particularly cetaceans (Zimmer 2011). Compared with more traditional visual survey methods, acoustic monitoring works day and night, is robust to variation in environmental conditions such as weather, and in some habitats has the potential to detect animals at greater distances, hence increasing the area surveyed (Marques et al. 2011). It has enabled studies of rare and elusive species such as the vaquita (Thomas et al. 2017) and several species of beaked whale (Hildebrand et al. 2015; Yack et al. 2013) which, despite being visually cryptic, produce frequent sounds that can be detected by PAM systems.
One important application of PAM is to estimate population density or abundance (Marques et al. 2013). In the situation where multiple acoustic sensors are deployed simultaneously with a spatial separation such that some vocalisations can be detected on multiple sensors then an appropriate statistical framework for estimating density is spatial capture–recapture (SCR; also known as spatially explicit capture–recapture) (e.g. Borchers et al. 2015; Stevenson et al. 2015). SCR is an extension of long-established capture–recapture (otherwise known as mark-recapture or mark-resight) methods where data on the detection (‘capture’) of individually identified animals are supplemented by data on the spatial location of the survey effort and the detections (Borchers and Efford 2008; Royle et al. 2009; Kidney et al. 2016). Recording not just whether but also where each animal was detected increases the accuracy of abundance and density estimates and potentially allows estimation of a spatially inhomogeneous animal density surface.
Acoustic spatial capture–recapture (ASCR) is a special case of SCR where the detections are of individual animal vocalisations or ‘cues’. Standard SCR relies on animals moving between detection locations and hence typically requires multiple capture occasions, while in ASCR, the sound travels almost instantaneously from its source and hence can be detected on multiple sensors in a single occasion. Estimation is of cue spatial density; to convert to animal density, an estimate of average cue production rate is required (Marques et al. 2013; Stevenson et al. 2021). As well as the location of detection, additional information is often available about the location of the vocalisation, e.g. the bearing, received sound level or time of arrival on multiple sensors. Borchers et al. (2015) showed that using this additional information further improved estimation accuracy.
PAM data can also present challenges that require accounting for to avoid bias in ASCR analysis. First, sound classification is imperfect, leading to false positive detections of sounds not originating from the target species. Second, vocalisation source level can vary considerably, causing heterogeneity in detectability. Third, there can be considerable measurement error in the additional information, particularly the bearings. Fourth (in common with other SCR studies), spatial density of source locations can vary substantially.
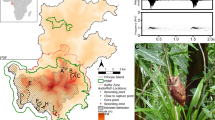
The methods presented here are motivated by a case study that demonstrates all four of the above issues: estimation of call density of bowhead whales (Baleana mysticetus) migrating through the Beaufort Sea. Multiple arrays of acoustic sensors were deployed in the Beaufort Sea during the migration season and recorded millions of bowhead whale calls (see Fig. 1). Automated detection and classification methods were therefore used to process the data, yielding call detections, received sound levels and bearings, and linking calls across detectors. However, a high proportion of the detections made on only one sensor (‘singletons’) were thought to be false positives. Naively including these singletons in the analysis would lead to a positive bias in the estimated abundance of unknown but likely substantial magnitude. To avoid this, we excluded all singletons from the analysis and conditioned the ASCR likelihood to only include calls detected on multiple sensors (‘multiply-detected calls’). Truncating the data in this manner, rather than attempting to model the proportion of false positives, is a good strategy when data are plentiful (see Sect. 6). Conn et al. (2011) proposed a similar procedure in a mark-resight study as a way to differentiate between resident and transient bottlenose dolphin populations, assuming that transients were never detected more than once. To our knowledge, this is the first time this approach has been used in SCR.

Map of the DASAR deployment locations for 2008–2014, with a detailed view of site 5. In 2010, sensor F at site 5 was lost, and its data were not available for analysis. This image is originally presented in Thode et al. (2020).
Our case study features some additional complications that may commonly appear in real-world data but are not typically all dealt with. Call source level was thought to vary substantially and so we include source level as a random effect in our model. Exploratory analysis showed that while most estimated bearings were accurate, some appeared to be very inaccurate. We therefore developed a two-part discrete mixture model for bearing error, extending the bearing error methods of Borchers et al. (2015). Finally, we allowed for an inhomogeneous density model to accommodate the spatial preference of the migrating whales (and thus their calls).
In Sect. 2, we describe the case study in more detail. We then present the extended ASCR model in Sect. 3. In Sect. 4, we evaluate the model performance via simulation, and show how ignoring some of the real-world issues can result in substantial bias. Section 5 gives results from a proof-of-concept application of the model to a single day of data. Finally, in Sect. 6, we discuss results, limitations and alternatives.
2 Case Study
Every year from August to October, the Bering-Chukchi-Beaufort population of bowhead whales (Baleana mysticetus) migrates westwards through the Beaufort Sea to their wintering areas in the Bering Sea (Blackwell et al. 2007). They travel mainly over the continental shelf in waters less than 25 ms deep, approximately 10–75 km offshore (Greene et al. 2004). During this migration, bowhead whales are known to produce a wide variety of calls (Ljungblad et al. 1982). The purpose of these calls remains largely unknown, although they may be used for long-range communication (Thode et al. 2020) or to navigate through ice (George et al. 1989).
Between 2007 and 2014, up to 35 Directional Autonomous Seafloor Acoustic Recorders (Greene et al. 2004, DASARs;) were deployed at several sites off the north coast of Alaska to monitor the calling behaviours of the migrating whales during seismic surveys. An automated detection and classification procedure was developed to handle the more than one million detected calls over the period 2007–2014 (Thode et al. 2012, 2020). This procedure could identify discrete sounds as bowhead whale calls, and subsequently link them with detections from other DASARs within the array if they were the same call (Thode et al. 2012).
Even though it was not the original purpose of the monitoring, the detection and linking of calls created detection histories for every detected call, making these data suitable for ASCR. ASCR theory assumes capture histories without errors, i.e. calls can be missed but not incorrectly positively identified or matched. Several data cleaning procedures were required to meet this assumption as far as possible. Sometimes, calls would be wrongly identified as other discrete sounds. Distant airgun signals were occasionally misidentified as bowhead whale calls; bearded seals (Erignathus barbatus) and walruses (Odobensu rosmarus divergens) could appear similar as well, but these were generally rare and much quieter (Thode et al. 2012). Moreover, if bowhead whale calls overlapped in time, they could be incorrectly matched as being the same call. Cheoo (2019) showed that the number of detection histories that involved just one sensor (‘singletons’) in the automated data was not in line with expectations based on sound propagation theory (see Fig. 2). It was therefore hypothesised that these singletons contain a high-degree of incorrectly classified calls (‘false positives’), mostly consisting of random fluctuations in the noise field or reverberations of whale calls, which were unlikely to be associated among multiple detectors. The solution we present here is to exclude singleton detection histories all together and modify the ASCR likelihood to be conditional on the capture histories involving at least two sensors. To ensure that the multiply-detected calls would contain no false positives, we cleaned the remaining data using a procedure described in Appendix A in Supplementary Materials.
In this study, we focus on the data from one specific day, 31 August 2010, from site 5, the most eastward site. Calls accumulated somewhat evenly across the day, resulting in a low expected rate of overlapping calls. The array consisted of six functioning sensors spaced at 7 kms from each other (see Fig. 1). For every call, the following data were recorded: a detection history as well as bearings, received sound levels, and noise levels for every involved DASAR. The source level and origin of the call are unobserved, and hence treated as latent variables. Throughout this manuscript, all sound measurements are denoted on the decibel scale (RMS; dB re 1 \(\mu \)Pa). More details on the background, availability, and pre-processing of the data are presented in Appendix A in Supplementary Materials.
3 Model
In this section, we first introduce the full likelihood. Following that, we derive each element of the likelihood individually. Consider an acoustic survey of an array of K sensors operating within a survey region \({\mathcal {A}} \subset {\mathbb {R}}^2\) over a period of time T. A total of n unique animal calls are detected by at least two sensors. For any multiply-detected call \(i \in {1,...,n}\), let \(\omega _{ij}\) be 1 if the call was detected at sensor \(j \in {1,...,K}\), and 0 otherwise. We define the matrix containing all detection histories as \(\varvec{\Omega }= (\varvec{\omega }_1,...,\varvec{\omega }_n)^\top \), where the detection history for call i is denoted \(\varvec{\omega }_i = (\omega _{i1},...,\omega _{iK})^\top \) and \(\top \) denotes the transpose. For every call i that was detected at sensor j, we also observe the bearing \(y_{ij}\), measured in degrees clockwise relative to true north, and the received sound level \(r_{ij}\). These data are contained in \({\varvec{Y}}= ({\varvec{y}}_1,...,{\varvec{y}}_n)^\top \) and \({\varvec{R}}= ({\varvec{r}}_1,...,{\varvec{r}}_n)^\top \), respectively. Latent variables are the spatial origins of calls, denoted by \({\varvec{X}}= ({\varvec{x}}_1,...,{\varvec{x}}_n)^\top \) where \({\varvec{x}}_i\) is a location in the Cartesian plane, and the source levels, denoted by \({\varvec{s}}= (s_1,...,s_n)^\top \). The support for s is denoted \({\mathcal {S}}\). Throughout this manuscript, we do not distinguish explicitly in notation between random variables and specific observations/realisations—this should be clear from the context.

Counts of detected calls by number of DASARs (sensors) involved per call at site 5 on 31 August 2010. Detections were included if the received level was at least 96 dB. The high proportion of singletons (detections on a single DASAR; 1417) raised concerns about the validity of those calls. The dashed line shows the number of singletons (570) that were estimated to be valid using the methods developed in this paper
The parameter vectors used in the model are (following previous literature as closely as possible): \(\varvec{\phi }\) for parameters associated with the spatial density of emitted calls, \(\varvec{\nu }\) for those associated with the source levels of calls, \(\varvec{\eta }\) for those associated with source sound propagation and received levels, \(\varvec{\theta }\) for those associated with detectability of calls, and \(\varvec{\gamma }\) for those associated with measurement error of the bearings. For notational convenience, we define the joint parameter vector \(\varvec{\xi }= (\varvec{\phi }, \varvec{\nu }, \varvec{\eta }, \varvec{\theta }, \varvec{\gamma })\). An summary of notation is presented in Table 1. A list of model assumptions is presented in Sect. 3.10.
3.1 Likelihood Specification
The likelihood is formed from the joint distribution of all observed and latent variables introduced above. We denote this likelihood \({\mathcal {L}}_f(\varvec{\xi })\) where the subscript f stands for ‘full’ to distinguish it from the conditional likelihood \({\mathcal {L}}_c(\varvec{\xi })\) which is conditional on the observed number of detections. Denoting both probability mass and density functions as f(.), we define the full likelihood as
As we do not observe the call locations and source levels, we marginalise over the unobserved \({\varvec{X}}\) and \({\varvec{s}}\) to obtain
The double integral in Eq. (2) is of dimension 3n, making this likelihood intractable. We follow Stevenson et al. (2015) in assuming calls to be independent of each other in all respects, allowing us to specify Eq. (2) as the product of n three-dimensional integrals:
where we assume independence between \({\varvec{y}}_i\) and \({\varvec{r}}_i\) given \({\varvec{x}}_i\), and \(\omega _{i}^{*}:= \sum _{j \in 1:k}w_{ij}\) denotes the total number of sensors involved in the detection of call i. The separation of the joint distribution inside the integrals in (3) follows from repeatedly applying Bayes’ formula. Note that conditioning the joint distribution on n in (2) is equivalent to conditioning every marginal distribution on involving at least two sensors in (3); for the second and third element, this conditioning is implicit in conditioning on detection history \(\varvec{\omega }_i\). If we were to assume a constant spatial density of calls, it would be sufficient to simply maximise \({\mathcal {L}}_c\), as the parameter estimates from the conditional MLE are identical to those obtained by maximising the full likelihood—a Horvitz Thompson-like estimator could then be used to derive the mean density (Borchers and Efford 2008). In our case study, however, the spatial density of calls is known to be inhomogeneous, so the full likelihood is required.
In the following sections, we specify in further detail \(f(n; \varvec{\phi }, \varvec{\theta }, \varvec{\nu })\) and the five components in Equation (3). For readability, we will henceforth omit the indexing of parameters in the probability functions.
3.2 Detection Probability, \(p({\varvec{x}}_i, s_i)\)
A fundamental part of ASCR is the concept of a detection probability, which is the probability that an emitted call is detected by a sensor—this is the way ASCR accommodates for missed calls, i.e. false negatives. The function that relates this probability to covariates is called the detection function, denoted p(.).
For ASCR, it was proposed to be most appropriate to use a detection function based on the received (sound) level, also known as signal strength, which is primarily a function of source level s and range (i.e. distance to the origin of the sound, \(\textrm{d}({\varvec{x}})\)) (Efford et al. 2009; Stevenson et al. 2015). We propose a detection function for sensor j where \(g_0 \in (0, 1)\) denotes the detection probability when the true received level of a call surpasses threshold \(t_r\), and zero probability else, as follows:
where \(\Phi \) denotes the standard normal cumulative density function (cdf) and \(\sigma _r\) denotes the measurement and propagation error on received level (see Sect. 3.4). The threshold \(t_r\) should be set by the analyst, and in this study, it is roughly equal to the maximum level of ocean background noise. As there is error on the received levels, calls with an expected received level close to \(t_r\) can have a detection probability between 0 and \(g_0\).
3.3 Detected Calls, f(n)
To construct a probability function for the number of detected calls, we start with the distribution of emitted calls, which are assumed to occur independently of one another in space and time. Thus, let the number of emitted calls at point \({\varvec{x}}\) in period T be a realisation of a spatially inhomogeneous Poisson point process with intensity \(D({\varvec{x}})\). As we only observe multiply-detected calls, we take the product of this intensity and the probability of multiply detection, denoted by
where \(\omega ^*:= \sum _{j \in {1:k}} \omega _{j}\). Note that Eq. (5) is the part of the method that deviates from conventional ASCR and allows us to exclude all singletons. We rewrite Eq. (5) and marginalise over source level to get the filtered Poisson point process with spatially varying rate parameter \( \int _{\mathcal {S}} D({\varvec{x}})p.({\varvec{x}}, s)f(s)ds\). Lastly, we marginalise over \({\varvec{x}}\) to get the distribution of the total number of multiply-detected calls over time T:
The expected total number of emitted calls is then derived by integrating the density over the study area, such that \({\mathbb {E}}[N] = \int _{\mathcal {A}}D({\varvec{x}})\textrm{d}{\varvec{x}}\).
3.4 Received Level, \(f({\varvec{r}}_i| \varvec{\omega }_i, {\varvec{x}}_i, s_i; \varvec{\eta })\)
Sound waves propagating through water lose strength through various mechanisms (Jensen et al. 2011), a process known as ‘transmission loss’. We approximate this process by allowing a single parameter \(\beta _r\) to determine the acoustic transmission loss, such that
where \(d_j({\varvec{x}}_i)\) returns the distance from sensor j to location \({\varvec{x}}_i\). Here, \(\beta _r = 20\) would reflect purely spherical spreading loss, while \(\beta _r = 10\) would reflect cylindrical spreading loss; in reality, the dominant process will be range- and depth-dependent, with other factors also playing a role (Jensen et al. 2011). To capture potential error in the propagation model and the measurement of received level, we follow Stevenson et al. (2015) and assume Gaussian error on the received levels, giving
where \({\mathcal {N}}\left( \mu ,\sigma ^2\right) \) denotes a normal distribution with mean \(\mu \) and variance \(\sigma ^2\). Unlike Stevenson et al. (2015), we do not assume all calls above threshold \(t_r\) to be detected with certainty. Instead, we allow for a single detection probability for calls with received levels above the threshold, since the signal processing used in our case study meant that other factors also determined detectability (see Sect. 3.2). As \(r_{ij}\) is only recorded if sensor j detected the call, we condition the indexing on the \(j^\text {th}\) DASAR detecting the call. Assuming independence between the sensors, the third component of Equation (3) becomes
where \(\phi \) denotes the standard normal probability density function (pdf). This is in effect a normal distribution truncated at \(t_r\).
3.5 Bearings, \(f({\varvec{y}}_i| \varvec{\omega }_i, {\varvec{x}}_i; \varvec{\gamma })\)
DASARs were designed to record the direction to discrete sounds; these recorded bearings contain measurement errors. Following Stevenson et al. (2015) and Borchers et al. (2015), we capture this error by assuming a von Mises distribution with concentration parameter \(\kappa \) on the bearings. Analogous to the received levels, we only record bearings at DASARs that detected a call. Assuming that the sensors are independent of each other, the second component of Eq. (3) would therefore be
with \(I_0\) denoting the modified Bessel function of degree 0. Exploratory research found that while most bearings appeared relatively accurate, a small proportion seemed highly inaccurate, which could have been the result of (i) only a fraction of the call getting captured by the measurement window of the sensor, or (ii) a low signal-to-noise ratio at the sensor. (The latter should be rare as we truncated the data at a sound level equal to the highest noise observed.) Moreover, some of the mismatched calls could still have been present in the data, thus leading to disagreement among the bearings. To accommodate these inaccurate bearings, we apply a two-part discrete mixture model on the bearings. In effect, we fit a von Mises distribution with a lower accuracy (dispersion is \(\kappa \)) for some proportion of the bearings, \(\psi _\kappa \), and a von Mises distribution with higher accuracy (dispersion is \(\kappa + \delta _\kappa \), where increment \(\delta _\kappa \) is non-negative) to the remaining proportion of the bearings, \(1 - \psi _\kappa \). The second component of Eq. (3) thus becomes
3.6 Call Location Given s and at Least Two Detections, \(f({\varvec{x}}_i | s_i, \omega ^*_i \ge 2 {; \varvec{\phi }, \varvec{\theta }})\)
To evaluate the pdf of call locations, we assume independence between call location \({\varvec{x}}_i\) and source level \(s_i\), and use Bayes’ formula to obtain
Although \(f({\varvec{x}}_i)\) is unknown, we do know that it is proportional to the emitted call density, such that \(f({\varvec{x}}_i) = {D({\varvec{x}}_i)}/{ \int _{{\mathcal {A}}} D({\varvec{x}})d{\varvec{x}}}\). Thus, we can simplify Equation (12) as
3.7 Source Level Given at Least Two Detections, \(f(s_i | \omega ^*_i \ge 2 {; \varvec{\phi }, \varvec{\theta }, \varvec{\nu }})\)
Analogous to above, we assume independence between and among call location and source level, to derive
Note that a part of the numerator in Eq. (14) cancels out against the denominator in Eq. (13), and that the denominator of Eq. (14) denotes the effective sampled area. Thode et al. (2020) estimated source levels using the estimated origin of the call, the received level on the sensor nearest the origin, and a transmission loss parameter \(\beta _r\) of 15. Based on the observed distribution of these estimated source levels, we assume a normal distribution on \(s_i\) truncated at 0, such that
3.8 Detection History, \(f(\varvec{\omega }_i| {\varvec{x}}_i, s_i, \omega ^*_i \ge 2; \varvec{\theta })\)
If we assume sensors to be independent, we can view the detection history of a call as a realisation of a binomial process with size K and non-constant probability \(p_j\) with \(j = 1,\ldots ,K\), where the order is relevant, and hence, the binomial coefficient is absent. This gives
where \(p.({\varvec{x}}_i, s_i)\) appears in the denominator to account for the conditioning on at least two sensors in every call detection history (see Eq. (5)).
3.9 Variance Estimation
We do not use the Hessian matrix to extract standard errors, as these are only asymptotically normal. Instead, we estimate uncertainty using a nonparametric bootstrap, where we re-sample the calls with replacement (Borchers et al. 2002) and fit the model every time. Following that, we estimate the standard error by taking the standard deviation of all bootstrapped parameter estimates, and we take the 2.5% and 97.5% percentiles to estimate their 95% confidence intervals.
3.10 Assumptions
The method presented in this manuscript relies on several assumptions, as follows. (1) Call origins are a realisation of a Poisson point process, thus calls are spatially and temporally independent given this process. (2) Calls are omnidirectional and equally detectable given only the received level (i.e. no unmodelled heterogeneity). (3) Sensors are identical in performance and operate independently; (4) Calls are matched without error and identified correctly, but can be missed (i.e. no false positive, but false negatives are allowed). (5) The transmission loss model is correctly specified. (6) Uncertainty on bearings and received levels are independent. (7) Source level of a call is independent of space and time. These assumptions are discussed in more detail in Appendix B in Supplementary Materials.
3.11 Practical Implementation
We fitted the model using maximum likelihood estimation (MLE) in R 4.1.0 (R Core Team 2021) with some components written in C++ and linked to R through the Rcpp library (Eddelbuettel 2013). We standardised the covariates in the density model to improve the convergence. The estimates were found through optimisation with the function nlminb() (R Core Team 2021). We used a spatial mesh with non-uniform grid spacing to reduce run-time, with increased grid spacing farther from the sensor array (see Appendix C in Supplementary Materials for details).
4 Simulation Study
We used simulations to evaluate the performance of the model under variable source levels (scenario 1) and fixed source levels (scenario 2). Both scenarios featured measurement error on bearings simulated from a two-part mixture model, and inhomogeneous call density specified as follows:
where d denotes the (scaled) shortest distance to the coast. The parameter values used were chosen to match those from the case study data analysis and are given in Table 2.
For each scenario, we simulated 100 data sets and analysed each data set with five models: (a) the true model, i.e. that corresponding to the simulated scenario; (b) a model with incorrect assumption about source level, i.e. for scenario 1, the model assumed fixed source level, and for scenario 2, the model assumed variable source level; (c) a simpler bearing model assuming a von Mises distribution on bearing error but no two-part mixture; (d) a model that omitted the bearing information altogether; and (e) a model assuming a homogeneous spatial density. We did not include a simulation scenario where we naively fit model to false positives, as the effect on the estimates is already known; it will induce a positive bias that will increase with increasing false positive rate.
For each scenario and model combination (1a-e and 2a-e), we evaluated performance by calculating the coefficient of variation (CV), relative error and relative bias in estimated total abundance. Further details are given in Appendix D in Supplementary Materials.

Relative error, relative bias and coefficient of variation for \({\hat{N}}\) from 100 simulations. The black dots correspond to the relative bias (RB; the mean relative error) and the grey shading shows the spread of relative error per scenario. The RB and coefficient of variation (CV) for every scenario and model combination are shown just above the x-axis. Simulation scenario 1 is variable sound source level and 2 is fixed sound source level. Analysis model (a) is the true model, (b) the incorrect source level model, (c) an incorrect simple bearing model, (d) a model with bearing data, and (e) an incorrect homogeneous spatial density model
4.1 Results
Both correctly specified models (1a and 2a) gave near-unbiased results (Fig. 3). Fitting a single source level model in the variable source-level scenario (1b) introduced a strong negative bias with low variance; fitting a variable source level in the fixed source-level scenario (2b) introduced a strong negative bias, although this bias could be explained by a flat likelihood surface and resulting sensitivity to starting values, i.e. that the true optimum was not found. Using an incorrect, simple bearing model (1c and 2c) did not induce bias but did increase variance. Ignoring the bearing information induced a small positive bias and greater variance in the variable source level scenario (1d) but had little effect on the fixed source level scenario (2d). Lastly, using an incorrectly specified constant spatial density model (1e and 2e) resulted in severe overestimation of abundance (\(>300\%\) and \(>200\%\) bias for variable and fixed source level scenarios, respectively).
5 Bowhead Whale Analysis
We used the proposed method to estimate bowhead whale call density and abundance at site 5 on 31 August 2010. We used data from a single day, and as we present our estimate as call density per day, we did not need to adjust for our study time (\(T = 1\)). We set \(t_r\) at 96 dB, as the observed background noise never surpassed this level. The true call density surface is unknown, and therefore, we fitted several candidate models, which we compared using Akaike’s information criterion (AIC; Akaike (1998)). As the bowhead whales are thought to exhibit a spatial preference based on their distance from the coast and ocean depth during fall migration (Greene et al. 2004), we fitted a candidate set of 35 models containing combinations of distance and depth as linear, quadratic or smooth covariates—see Appendix E in Supplementary Materials for full details. Measures of uncertainty in abundance (standard error, CV, and quantile coefficient of dispersion (QCD)) were derived by bootstrapping the calls 999 times, refitting the AIC-best model each time. The QCD is a relative measure and insensitive to outliers, and is defined as \((Q_3 - Q_1) / (Q_3 + Q_1)\), where \(Q_1\) and \(Q_3\) are the first and third quartile, respectively. To further illustrate the potential benefits of modelling source level heterogeneity, we included point estimates of the best model equivalent with a fixed source level.
5.1 Results
The lowest AIC model included density modelled as a smooth function of distance to coast and a quadratic relation with depth. We observe an increase in density, followed by a decrease, as we increase the distance from the coast (Fig. 4, left panel). Moreover, density is higher just east of the sensor array, potentially due to some effect of ocean depth. Even though we observe increases in uncertainty in the southern regions and slightly in the north, overall QCD estimates are low (Fig. 4, right panel). Total abundance of bowhead whale calls was estimated at 5741 in the study area, and the CVs of the parameter estimates varied considerably, ranging from 0.95% for \({\hat{\mu }}_s\) to 58.22% for \(\widehat{\beta _\text {s(depth).3}}\) (Table 3).

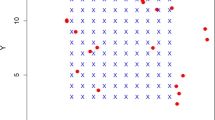
A map of the study site 5 from 31 August 2010 with the estimated density surface (left) and the associated empirical quartile coefficient of dispersion (QCD; right). Locations of the six DASARs are indicated with the triangles. The square grid cells within 10 km of the array each have an area of 6.25 km\(^2\), and area of 25 km\(^2\) elsewhere. The density map corresponds to the model with the lowest AIC, which is model 33 in Appendix D in Supplementary Materials. The QCD is derived from 999 Monte Carlo simulations based on the same model, where the calls are re-sampled
6 Discussion
We have developed and tested a novel extension of acoustic spatial capture-recapture by conditioning on a minimum of two detections per individual call. Removing single detections may be necessary when the validity of these calls is challenged, and our simulation study shows that the method gives unbiased results in both variable and single source-level scenarios. Even though this model applies to (marine) acoustic data, the extension proposed can be applied to all forms of SCR. Fitting a single source level model to variable source level data, thus ignoring heterogeneity in the detectability of the calls, resulted in severe underestimation of abundance. This represents a cautionary tale for other applications of SCR, both terrestrial and aquatic, when it is hypothesised that there is some random variable affecting individual detectability—it does not have to be something as tangible as a source level. Moreover, we confirmed results from Stevenson et al. (2015) on adding bearing information to a SCR model and found a further increase in precision when allowing for a mixture of ‘good’ and ‘bad’ bearings. Finally, we also confirm that incorrectly assuming a constant call density surface can lead to severe overestimates of the abundance. The notion that density of bowhead whale(s) (calls) is the highest 10–75 km from the coast (Greene et al. 2004) seems to be confirmed by the best model, which finds a density that is highest a bit away from the coast, but not too far. The high spatial call density in the north-eastern part of the study area (Fig. 4) was unexpected, but could have been a consequence of using only data from one day. This likely strongly violated the Poisson assumption about call spatial location, since whale location is spatially autocorrelated, especially on small time scales (Wursig et al. 1985). Alternatively, it has been hypothesised that the higher estimated density of calls in the east could be due to the directionality of the calls or the effect of water depth on sound propagation (Blackwell et al. 2012). In this study, the authors observed 2.1 times as many calls east of the array as west. Future research could explore whether a more gradual increasing/decreasing density slope is found if more days were included in the analysis, resulting in reduced autocorrelation among the call origins. Another extension could be to use a longer time series and consider a two-dimensional spatial density surface, e.g. through splines on latitude and longitude. However, the biological pattern of migration along the coast combined with limited sensor spacing in the east–west direction means this may not produce improved inferences.
The model-based expected number of singletons was 570, whereas there were 1417 observed singletons, which is 149% more than expected and confirmed our suspicions regarding false positives (see Fig. 2).
An alternative to truncating singletons would be to retain all data and try to model the occurrence of false positive detections. For example, one could assume that an unknown proportion of detections are false positives and include a parameter for this proportion in an analogous way to the \(M_{t, \alpha }\) model presented by Yoshizaki (2007). Detection at any detector j could have three outcomes: no detection with probability \(1-p_j\), false detection with probability \(\alpha p_j\), and correct detection with probability \(p_j\). Moreover, we would have to implement some modification of the \(M_b\) model (Otis et al. 1978) to account for a change in \(\alpha \) for the multiply-detected calls, which would likely involve an additional parameter. A benefit of this \(M_{b, \alpha }\) model would be that it could allow for false positives in multiply-detected calls; however, it increases complexity and introduces hard-to-test assumptions on the false positive rate. Given that a large amount of acoustic data are potentially available (we used data from just one day), including poor-quality data seemed undesirable given the additional complexity and run time. Hence, we consider the truncation approach developed here to be best for our application of ASCR.
The main model in our study conditions on at least two positive detections for every detection history, but can readily be extended to condition on a minimum of three or more involved sensors. This requires generalising Eq. 5 to
where \(\omega ^*_\text {min}\) denotes the minimum number of sensors involved. Preliminary simulations showed no apparent bias, although depending on the situation, conditioning this way can rapidly reduce the amount of data available and hence decrease estimator precision. This is illustrated by the relative frequencies in Fig. 2.
We estimated variance empirically by bootstrapping the calls. This assumes independence between the calls, which we know is violated as the calls are produced by whales and whales are spatially autocorrelated. Moreover, calls can potentially trigger responses from nearby whales, leading to temporal correlation between them (Thode et al. 2020). Some of the spatial and temporal dependence was eliminated by removing all detections with a received level below 96 dB, as this thinned the data, assuming independence between call characteristics and ocean noise. To create more accurate variance estimates, one could stratify the data by time and bootstrap these time chunks, thereby removing some of the autocorrelation. Even better, one could sample short time frames from several days and combine those to obtain the desired amount of data to analyse, in which case the analysed observations themselves could be assumed independent and likelihood-based variance estimates are acceptable (given a large enough data set). The length and frequency of these time chunks will be case specific, as this will depend on the calling behaviour of the studied species.
We estimated model parameters using MLE as opposed to in a Bayesian inferential framework, with MLE having coding simplicity and reduced run time as the main benefits. We did find that convergence was sometimes slowed due to flat likelihood surfaces as a consequence of the many sources of variation in our model. A benefit of using a Bayesian framework would be the possibility to include informative prior distributions based on previous research, especially on the latent variable source level, which would likely improve convergence and may improve precision of density and abundance estimates.
Our method derives a call abundance, which can be converted into an animal abundance by correcting this estimate for the call rate, similarly to Marques et al. (2013). Ideally, this call rate is estimated for the same population and alongside the collection of the data, but this is not always possible. Blackwell et al. (2021) estimated a call rate for the Bering-Chukchi-Beaufort population over a longer period of time. Naively dividing our estimate or total calls by their median call rate estimate of 31.2 calls/whale/day (interquartile range of 12\(-\)129.6 calls/whale/day) gives us \({\widehat{N}}_\text {whales} = 5741.39 / 31.2 \approx 184\) individuals. We present this number for illustration alone; for correct inference, one should properly account for the variance around call rate and call abundance estimates. Alternatively, there are methods that directly estimate animal density based on cues (for more information, see e.g. Fewster et al. (2016) and Stevenson et al. (2019)).
When background noise is highly variable, selecting a truncation level that ensures that noise (almost) never surpasses the received level might result in most data being discarded. When data are scarce, it may then be beneficial to use a detection function based on the signal-to-noise ratio (SNR). Here, detection probability is assumed to depend on the ratio of the received level to the background noise, and could increase either step-wise or gradually as a function of SNR. This way, no data will be lost due to truncation. However, using an SNR detection function requires a random sample of accurate noise measurements for an additional Monte Carlo integration in the likelihood, and noise measurements at all sensors for every cue with a detection history to be able to estimate the detection probabilities. A detailed description of the SNR likelihood is presented in Appendix F in Supplementary Materials.
A potential weakness of the model is the fact that we assume the same propagation loss model for the entire study area. For most of the study site, this assumption is reasonable, as it concerns a shallow plateau with little variation in ocean depth. However, the ocean floor drops in the northern part of the study site, resulting in altered propagation conditions. It is assumed that the bowhead whales migrate mainly over the shallow plateau, and hence, depth-induced inhomogeneous propagation is not a practical issue in our case study. In general, however, it is something that should be considered when modelling sound propagation in variable (ocean) landscapes. Phillips (2016) and Royle (2018) presented ways in which it is possible explicitly to model variable sound attenuation. Such a model requires accurate and sometimes high-resolution information on environmental variables that affect sound attenuation, such as ocean depth.
The model presented here extends the scope of SCR to provide reliable inference on spatial density and abundance from passive acoustic data. Removing single detections will also be of use in other SCR applications where single detections are unreliable—for example, when association between detections is not perfect such that repeat detections of the same individual are sometimes incorrectly classified as single detections of a new individual. This can happen in situations where natural animal characteristics are used for identification, such as photo- and genetic-ID.
References
Akaike H (1998) Information theory and an extension of the maximum likelihood principle. In: Selected papers of Hirotugu Akaike. pp 199–213. Springer
Blackwell SB, McDonald TL, Kim KH, Aerts LAM, Richardson WJ, Greene CR Jr, Streever B (2012) Directionality of bowhead whale calls measured with multiple sensors. Mar Mamm Sci 28(1):200–212
Blackwell SB, Richardson W, Greene C Jr, Streever B (2007) Bowhead whale (Balaena mysticetus) migration and calling behaviour in the Alaskan Beaufort Sea, autumn 2001–04: an acoustic localization study. Arctic 60(3):255–270
Blackwell SB, Thode AM, Conrad AS, Ferguson MC, Berchok CL, Stafford KM, Marques TA, Kim KH (2021) Estimating acoustic cue rates in bowhead whales, Balaena mysticetus, during their fall migration through the Alaskan Beaufort Sea. J Acoust Soc Am 149(5):3611–3625
Borchers DL, Buckland ST, Zucchini W (2002) Estimating animal abundance: closed populations. Springer, London
Borchers DL, Efford MG (2008) Spatially explicit maximum likelihood methods for capture-recapture studies. Biometrics 64(2):377–385
Borchers DL, Stevenson BC, Kidney D, Thomas L, Marques TA (2015) A unifying model for capture-recapture and distance sampling surveys of wildlife populations. J Am Stat Assoc 110(509):195–204
Cheoo G. V. (2019). Estimation of bowhead whale (Balaena mysticetus) population density using spatially explicit capture-recapture (SECR) methods. Master’s thesis, Universidade De Lisboa
Conn PB, Gorgone AM, Jugovich AR, Byrd BL, Hansen LJ (2011) Accounting for transients when estimating abundance of bottlenose dolphins in Choctawhatchee Bay, Florida. J Wildlife Manag 75(3):569–579
Eddelbuettel D (2013) Seamless R and C++ Integration with Rcpp. Springer, New York
Efford MG, Dawson DK, Borchers DL (2009) Population density estimated from locations of individuals on a passive detector array. Ecology 90(10):2676–2682
Fewster RM, Stevenson BC, Borchers DL (2016) Trace-contrast models for capture-recapture without capture histories. Stat Sci 31(2):245–258
George JC, Clark C, And GMC, Ellison WT (1989) Observations on the ice-breaking and ice navigation behavior of migrating bowhead whales (Balaena mysticetus) near Point Barrow, Alaska, spring 1985. Arctic 42(1):24–30
Greene CR, McLennan MW, Norman RG, McDonald TL, Jakubczak RS, Richardson WJ (2004) Directional frequency and recording (DIFAR) sensors in seafloor recorders to locate calling bowhead whales during their fall migration. J Acoust Soc Am 116(2):799–813
Hildebrand JA, Baumann-Pickering S, Frasier KE, Trickey JS, Merkens KP, Wiggins SM, McDonald MA, Garrison LP, Harris D, Marques TA, Thomas L (2015) Passive acoustic monitoring of beaked whale densities in the Gulf of Mexico. Sci Rep 5(1):16343
Jensen FB, Kuperman WA, Porter MB, Schmidt H (2011) Computational ocean acoustics. Springer, New York
Kidney D, Rawson BM, Borchers DL, Stevenson BC, Marques TA, Thomas L (2016) An efficient acoustic density estimation method with human detectors applied to gibbons in Cambodia. PLoS ONE 11(5):e0155066
Ljungblad DK, Thompson PO, Moore SE (1982) Underwater sounds recorded from migrating bowhead whales, Balaena mysticetus, in 1979. J Acoust Soc Am 71(2):477–482
Marques T, Munger L, Thomas L, Wiggins S, Hildebrand J (2011) Estimating North Pacific right whale Eubalaena japonica density using passive acoustic cue counting. Endangered Species Res 13(3):163–172
Marques TA, Thomas L, Martin SW, Mellinger DK, Ward JA, Moretti DJ, Harris D, Tyack PL (2013) Estimating animal population density using passive acoustics. Biol Rev 88(2):287–309
Otis DL, Burnham KP, White GC, Anderson DR (1978) Statistical Inference from Capture Data on Closed Animal Populations. Wildl Monogr 62:3–135
Phillips G. T. (2016). Passive Acoustics: A Multifaceted Tool for Marine Mammal Conservation. PhD thesis, Duke University
R Core Team (2021) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria
Royle JA (2018) Modelling sound attenuation in heterogeneous environments for improved bioacoustic sampling of wildlife populations. Methods Ecol Evol 9(9):1939–1947
Royle JA, Nichols JD, Karanth KU, Gopalaswamy AM (2009) A hierarchical model for estimating density in camera-trap studies. J Appl Ecol 46(1):118–127
Stevenson BC, Borchers DL, Altwegg R, Swift RJ, Gillespie DM, Measey GJ (2015) A general framework for animal density estimation from acoustic detections across a fixed microphone array. Methods Ecol Evol 6(1):38–48
Stevenson BC, Borchers DL, Fewster RM (2019) Cluster capture-recapture to account for identification uncertainty on aerial surveys of animal populations. Biometrics 75(1):326–336
Stevenson BC, Dam-Bates P, Young CKY, Measey J (2021) A spatial capture-recapture model to estimate call rate and population density from passive acoustic surveys. Methods Ecol Evol 12(3):432–442
Sugai LSM, Silva TSF, Ribeiro JW, Llusia D (2019) Terrestrial passive acoustic monitoring: review and perspectives. Bioscience 69(1):15–25
Thode AM, Blackwell SB, Conrad AS, Kim KH, Marques T, Thomas L, Oedekoven CS, Harris D, Bröker K (2020) Roaring and repetition: how bowhead whales adjust their call density and source level (Lombard effect) in the presence of natural and seismic airgun survey noise. J Acoust Soc Am 147(3):2061–2080
Thode AM, Kim KH, Blackwell SB, Greene CR, Nations CS, Mconald TL, Macrander AM (2012) Automated detection and localization of bowhead whale sounds in the presence of seismic airgun surveys. J Acoust Soc Am 131(5):3726–3747
Thomas L, Jaramillo-Legorreta A, Cardenas-Hinojosa G, Nieto-Garcia E, Rojas-Bracho L, Ver Hoef JM, Moore J, Taylor B, Barlow J, Tregenza N (2017) Last call: passive acoustic monitoring shows continued rapid decline of critically endangered vaquita. J Acoust Soc Am 142(5):512–517
Wursig B, Dorset EM, Fraker MA, Payne RS, Richardson WJ (1985) Behavior of bowhead whales, Balaena mysticetus, summering in the Beaufort Sea: a description. Fish Bull 83(3):357–377
Yack TM, Barlow J, Calambokidis J, Southall B, Coates S (2013) Passive acoustic monitoring using a towed hydrophone array results in identification of a previously unknown beaked whale habitat. J Acoust Soc Am 134(3):2589–2595
Yoshizaki J (2007). Use of Natural Tags in Closed Population Capture-Recapture Studies: Modeling Misidentification. PhD thesis, North Carolina State University
Zimmer W (2011) Passive acoustic monitoring of cetaceans. Cambridge University Press, Cambridge
Acknowledgements
We would like to thank the anonymous reviewer and associate editor for their excellent feedback. We would also like to thank Dr. Ben Stevenson and Prof. David Borchers for their help in the early stages of this project. Finally, we wish to express our deepest gratitude to Shell Exploration & Production Company (SEPCO) and Dr. A. Michael Macrander, Dr. Louis Brzuzy, and Dr. Koen Broker for their consistent support of DASAR data collection in 2007–2014 and their encouragement of data analyses and publication of results throughout those years and the years that followed. Tiago Marques was partly supported by CEAUL (funded by FCT - Fundação para a Ciência e a Tecnologia, Portugal, through the project UIDB/00006/2020).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Code and Data Availability
The code to run the simulation, and the code and data used to fit the models, are publicly available at https://github.com/fpetersma/bowhead_whale_ASCR.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Petersma, F.T., Thomas, L., Thode, A.M. et al. Accommodating False Positives Within Acoustic Spatial Capture–Recapture, with Variable Source Levels, Noisy Bearings and an Inhomogeneous Spatial Density. JABES 29, 471–490 (2024). https://doi.org/10.1007/s13253-023-00563-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13253-023-00563-0