
Abstract
Energy management systems (EMS) play a crucial role in ensuring efficient and reliable operation of networked microgrids (NMGs), which have gained significant attention as a means to integrate renewable energy resources and enhance grid resilience. This paper provides an overview of energy management systems in NMGs, encompassing various aspects including system architecture, optimization algorithms, control strategies, and integration of distributed energy resources. The paper highlights the challenges and opportunities associated with energy management in NMGs and presents key approaches and technologies adopted in the field. Furthermore, it explores the implications of emerging trends such as data-driven modeling, machine learning, and advanced communication technologies on the design and performance of energy management systems in networked microgrids. Through this comprehensive overview, the paper aims to provide researchers, practitioners, and policymakers with valuable insights into the state-of-the-art developments and future directions in energy management systems for networked microgrids.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Distributed energy resources (DER) are turning into a cornerstone in the evolution of power systems to a smarter grid. The rapid evolution of energy management systems poses significant challenges for real-time implementation, particularly in the areas of optimization, control design, and their seamless integration with distribution systems [1]. These challenges arise due to the increasing complexity and dynamic nature of networked microgrids. Achieving efficient and effective optimization algorithms and control strategies that can adapt its parameters in real-time to changing conditions becomes crucial. Additionally, integrating energy management systems with distribution systems requires addressing interoperability issues, ensuring reliable communication, and coordinating the operation of diverse energy resources. Overcoming these challenges is essential to enable the seamless and reliable operation of energy management systems within networked microgrids, facilitating the efficient utilization of resources and the integration of renewable energy sources. Such an impulse towards improving these key areas is currently being driven by green initiatives that motivate and depend upon the use of renewable energy resources. This is not to say that existing power systems are unable to take advantage of renewable energies. On the contrary, a significant portion of the energy being produced today is renewable. However, smart grids are being compared with centralized generation plants to take advantage of DER in a much more efficient way. Microgrids (MGs) are currently being studied as one of the most effective approaches to integrate DERs [2]. Since they are capable of managing electrical resources efficiently, they promise to be a cost-effective generation alternative that would also reduce the environmental impact of this process. Indeed, they can both work autonomously or in a grid-connected mode to accomplish a power demand, which makes them very efficient and versatile. MGs can also integrate distributed generators of renewable or non-renewable energy to supply the energy demands of a given area [3]. To effectively integrate MGs into the distribution system, a key component is the energy management system (EMS). EMS in a microgrid relies on power system analysis to ensure efficient and reliable operation. The EMS uses this information to optimize the dispatch of distributed energy resources to meet demand while maintaining the stability of an MG under varying conditions. Within the studies of intelligent energy management for distribution systems with MGs, it is necessary to consider the demand response, the optimal intra-day prices of the MGs connected in the network, and the intermittent behavior in the generation and the load. This information can be captured through real-time integrated demand response programs based on time of use and prices [4,5,6,7].
On the other hand, models for an MG as a single entity depend on the application. It is common to use a detailed MG model and apply an order reduction technique such as the Prony analysis model, coherency principle model, and perturbation methods, among other methods [2]. For example, in [8], a detailed model for an MG is obtained, and then a reduced model is proposed based on the structure preservation method. The reduced model exhibits accuracy of dynamics and simplicity concerning the complete model. Approaches based on artificial neural networks have also been proposed to approximate the dynamics of NMGs systems, as shown in [9] and [10]. The main drawback for distributed generation is uncertainties due to climatic conditions. In this way, tools such as artificial neural networks, vector support machines, and Gaussian process regression are used to model and predict wind and solar generation. It allows proposing control methodologies that can improve the performance of current techniques and provide information that is used in MG operator decisions [11]. A recent review of these topics is presented in [12, 13].
MGs operating in autonomous mode are common scenarios that could lead to energy quality problems or even instability when they have sizeable sudden load/generation changes [14]. A fault can be caused in a distributed generator due to uncertainties in the energy supplied by the non-dispatchable sources. Interconnecting several MGs together in a neighborhood to form networked microgrids (NMGs) is an alternative to overcome these issues by improving stability and resilience against critical operation or fault cases [15,16,17]. On the other hand, the connection of multiple MGs creating a distribution system with NMGs can improve the performance and reliability of distribution systems [14]. The concept of NMGs is also associated with multi-microgrid, which is a system with several MGs interconnected to a common coupling point, enabling power flow between them or with the upper-level power system. In the IEEE Standard 1547-2018 (Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces), it is stated that the reliability of a distribution system can be improved by the inclusion of multiple MGs through the energy sharing among MGs to satisfy the power demanded, reducing the burden on the main grid while improving the integration of renewable energies [14]. NMGs or multi-microgrids have emerged as a key approach to deal with the energy management of DERs in distribution systems, and several recent survey papers have presented relevant complementary topics as introduced in this work, such as in [16] where the main conceptualization of NMGs and future perspective are presented. In [17], it is reviewed the control architectures for DERs integration in distribution systems employing NMGs. Finally, in [14] the challenges that the uncertainties present for the energy management in multi-microgrids are reviewed.
Traditionally, energy management tasks are performed by the distribution system operator (DSO). In emerging scenarios with new actors such as NMGs or multi-microgrids in the distribution system, cooperative coordination with DSO is a fundamental challenge in modern power grid operation, since crucial issues such as privacy, security, and uncertainty must be considered. Optimal energy management of NMGs jointly with DSO is a fundamental problem currently under extensive research. For instance, NMGs require careful and precise control of the power flow between individual MGs. Several review articles on flow control in MGs (see [16, 18], and references therein) have been presented, but few of them mention tertiary-level control or energy management systems in NMGs. Such a crucial element of NMGs demands greater attention to be properly understood. In addition to the control strategies, the modeling of the NMGs is a fundamental part of the development of energy management systems. Models can be obtained from different methodologies or even by data-driven estimation [19]. Likewise, optimization algorithms including real-time decision variables, models, and the set of restrictions for iterative operations are the core of an effective real-time energy management system in NMGs. Therefore, the main contribution of the present study is to review and discuss different EMS strategies for AC and DC NMGs strewn in the academic literature encompassing various aspects including system architecture, optimization algorithms, control strategies, and integration of distributed energy resources. The paper highlights the challenges and opportunities associated with energy management in NMGs and presents key approaches and technologies adopted in the field. Furthermore, it explores the implications of emerging trends such as data-driven modeling, machine learning, and advanced communication technologies on the design and performance of energy management systems in networked microgrids. We also offer a brief general analysis of the advantages and drawbacks of each strategy.
The rest of the paper is organized as follows. In Sect. 2, the preliminaries and basic definitions on networked microgrids and main control stratagies are presented. Section 3 contains the development of the energy management system for networked microgrids. Section 4 presents the perspectives on intelligent energy management system for NMGs, finally, in Sect. 5, some conclusions are drawn.
2 Networked microgrids: cyber-physical structures

Cyber-physical energy structure of networked microgrids
In this section, we introduce the main concepts of networked microgrids, the main layer topologies, communication network configurations, and control architectures. In Fig. 1, it is shown a general cyber-physical energy structure of NMGs including a distribution network with physical MGs connected at different points, and the cyber variables \(\xi _i\) interacting through a communication network. First, we begin defining microgrids. An MG system is defined as a set of DERs such as distributed generators or energy storage devices, and a collection of controllable loads, with the ability to self-management its energy and its connection/disconnection to the main grid. MGs allow flexible integration of these resources and provide reliable electrical power [20]. One key feature of MGs is that they are self-sufficient and can operate either in an isolated or grid-connected mode [21]. Furthermore, the peculiar structure of an MG makes it easily identifiable when it is part of a large-scale system [22]. They can also improve the reliability and efficiency of power systems that integrate them [23, 24]. Moreover, with the ever-growing renewable energy resources, MGs may contribute to changing the energy-distribution paradigm from a centralized to a distributed system. However, this entails some important challenges that must be overcome. For instance, the fact that renewable-energy generation, such as solar or wind, has such an unpredictable output must be considered [25]. Moreover, every individual MG energy generation and energy-storage limitation limits their applications. Their stability conditions are also different from those of large-scale power systems, in particular, the ratio of inverter rating to network capacity leads to a smaller stable region in MGs [26].
To exploit the advantages of MGs and overcome some of their limitations in the inclusion of DERs, NMG systems have emerged as a fundamental paradigm to the energy management of distribution systems with high inclusion of DERs [16]. For instance, NMGs are much more reliable, durable, and resilient than any individual MG [27] and can provide power support to each other with less power production cost. It is possible to achieve this cost reduction via appropriate strategies of energy sharing [28]. Indeed, some numerical results show a cost reduction of around 30% [29]. Additionally, the intrinsic resiliency of NMGs makes them apt to support city operations during extreme events or catastrophes [30]. Besides, cooperation among NMGs showcases serious advantages for an individual MG operation [31]. For example, coordination among NMGs can reduce generation costs and improve the reliability and resiliency of the whole system [16, 21]. However, NMG systems have their particular challenges. For instance, information-sharing among the different components of the grid is still an issue. We know that centralized information management is not a convenient solution for this problem, and a distributed scope where entities share only partial information is an appealing approach. Another crucial challenge of NMGs is modeling uncertainties and working with limited precision level, either generation uncertainties of renewable resources or system simplifications [32].
There are several ways of classifying NMGs. NMGs can be classified as AC NMGs, DC NMGs, and AC/DC or hybrid NMGs [21, 23, 33, 34]. AC MGs are comparatively easier to design and implement, which makes them the most common type of MG. They also have the advantage of being compatible with the existing electrical grid. However, they have some drawbacks, such as the need for complex electronic devices to manage some distributed DER. DC MGs, on the other hand, can take advantage of the fact that some DERs operate natively with DC power, to use energy storage systems (ESS), e.g., batteries, it is necessary a DC link, and many devices are DC loads. Additionally, DC MGs are simpler structures and cost less than AC MGs. However, the main drawback of DC MGs is their incompatibility with actual power systems. Based on the interconnection technology, NMGs can use power transformers or power electronics converters [35].
The rest of this section is organized as follows. First, some possible physical architectures for NMGs are introduced. Second, some communication architectures that may be implemented in these systems are shown.
2.1 Physical layer topologies for NMGs
A fundamental part of NMGs is their physical interconnection. This physical layer defines some key features of NMGs, for instance, whether they are connected with the central distribution system or not. This also determines whether an MG with a deficit in energy generation can obtain support from one, two, three, or more MGs in its neighborhood. The type of physical interconnection chosen for an NMG has a significant impact on its final cost as well, since it determines, for example, the type of interconnection devices that must be installed for it to work [35]. Which topology will fit an NMG better depends on the scope and the intended application of the latter [22]. This subsection presents an overview of principal NMG topologies.

Network microgrids topologies
2.1.1 Radial topology
The main feature of radial topology is every MG direct connection with the central grid, as shown in Fig. 2a. Indeed, this network architecture entails that, for any set of n MGs, there will be an individual switch that will allow each MG to work in its isolated or connected mode. Thus, since MGs are neither connected through a communication link nor a physical link for power-sharing, there is no direct interaction among MGs. However, each MG communicates with the distributed network operator (DNO) to coordinate its interaction with the main grid. Hence, when an MG can not supply its load demand, it can purchase electrical power to the main grid. On the contrary, when an MG has a surplus of energy, it can be sold to obtain an economic benefit [36]. Another appealing feature of this architecture is that it allows for the isolation of a specific MG or set of MGs when a contingent arises. Thus, the microgrids that remain unaffected by the fault can continue working in a normal fashion. Moreover, radial topologies are a desirable alternative because of their plug-and-play capacity, which allows them to implement NMGs in large distribution systems [37]. Some authors also claim that, compared with other topologies, this architecture has the minimum possible impact on grid operation [22].
2.1.2 Daisy-chain topology
In this network architecture, MGs are also connected directly to the main grid. However, each one is connected to its adjacent MGs as well (Fig. 2b). Thus, energy and/or information can flow faster and more directly among MGs, which facilitates collaboration and energy trading. Moreover, besides allowing for the isolation of a specific microgrid in the event of a fault, the multiple connections inherent to this architecture allow NMGs to reroute energy through alternative energy paths when needed [38]. However, the information exchange required for the smooth operation of a daisy-chain NMG entails an enormous challenge: how to protect user privacy [36].
2.1.3 Mesh topology
As depicted in Fig. 2c, each MG is connected to several MGs by a physical or a communication link. Due to this topology being more complex than the former ones, coordination is more complicated. However, if NMGs with this topology behave cooperatively, it will improve operational performance and reduce operational costs [36, 39]. Moreover, the decision process is not only influenced by its local generation and local load demand but also influenced by the decisions of any other MG in the network [36]. Besides the above topologies, it is possible to define other schemes for systems with NMGs. In Fig. 3a, it is possible to observe a system with a parallel structure, the first set of microgrids NMG\(_{1}\) {MG\(_{1}\), MG\(_{2}\), MG\(_{3}\)} and a second set NMG\(_{2}\) {MG\(_{4}\), MG\(_{5}\)}. Each of these microgrids can have one of the previous architectures, but they have one connection with another microgrid. NMG\(_{1}\) and NMG\(_{2}\) have only one PCC. In this architecture, electrical interconnection between NMG\(_{1}\) and NMG\(_{2}\) is through the external grid. In Fig. 3b is shown that from MG\(_{5}\) to MG\(_{1}\) are in a series scheme. They only have one point of connection with the principal distribution network. In both cases, these microgrids work connected to the grid or in autonomous mode. Another possible option is a mixed parallel-series connection, a combination of the previous architectures.

Network microgrids alternative topologies
2.2 Communication networks in NMGs
Communication systems are an indispensable feature in NMGs, because sharing data is crucial for achieving their benefits and a normal operation [40], and they are decisive for the control and protection of the system [33]. They allow the coordination and use of distributed energy resources to improve the average performance of the system. On the other hand, these technologies entail other challenges due to packet loss and latency, and failures in the communication layer. These issues even can affect the system’s stability if a centralized approach is adopted. Besides, control performance on NMGs is related to the communication layer [20]. Thus, it is clear that communications protocols and networks have a relevant role in the operation of NMGs.
2.2.1 Master–slave communication network
In a master–slave architecture, there is a master controller and a set of slave controllers. The master controller collects measures and data from slave controllers, then computes control actions and sends them to each slave controller. Then, it is required to have predefined knowledge about the connections. Hence, in this topology, the plug-and-play feature is not possible [16]. Usually, when NMGs work in autonomous mode they use master–slave strategies [41] using protocols such as Modbus, Distributed Network Protocol 3 (DNP3), and IEC 61850 use a master–slave scheme. Modbus is a good choice for NMGs because of its stability, simplicity, and support. In this protocol, the network security varies depending on the transport layer. Likewise, DNP3 allows communication between substation equipment, control systems, and remote terminal units. It has several additional features that Modbus does not support, such as communication with devices over long distances. In the security aspect, DNP3 supports secure authentication. IEC 61850 is a protocol for data models, exchanges, and events management between power systems substations. IEC 61850 does not discuss aspects of cybersecurity where there is another standard for this topic (IEC 62351).
2.2.2 Publish-subscribe communication network
Publish-subscribe is an indirect communication channel that uses a specific protocol to share data. Here, an individual can broadcast information (publish) or read it from other elements in the same NMG [16]. The data distribution service (DDS) allows the use of the publish-subscribe scheme, and it has scalable and interoperable features. These elements are desirable for real-time applications of microgrids. In [42] it is highlighted that this communication protocol has the following advantages. First, automatic self-configuration of the network without a central node (plug-and-play feature). Second, it allows an intelligent data exchange due to nodes subscribing only to the information that they are interested in. Finally, the node role depends on network requirements.
2.2.3 Peer-to-peer communication network
This communication approach considers that each MG can communicate with all other MGs. Since each MG can produce or consume energy (it is a prosumer), peer-to-peer communication allows trading energy among MGs. Thus, each MG can sell or buy energy with or without intermediation (central coordinator), i.e., the relevant information is shared only by the parties concerned [43]. Therefore, peer-to-peer communication offers an alternative to achieve a fully decentralized grid [44]. This alternative also permits the exploitation of MG features such as getting a lower generation cost, a higher economic benefit for producers, reducing power losses, improving the management of distributed energy resources, and so on. In [45], a control strategy based on peer-to-peer communication, employing a broadcast gossip algorithm, is proposed to regulate voltage and reactive power-sharing. Numerical simulations in different scenarios (such as load variations, plug-and-play operations, and communication link failures) show good performance.
2.2.4 Event-triggered communication network
In an ideal communication process, data sampling is done continuously or periodically at a fixed time step. However, NMG systems have a communication layer with a finite bandwidth and energy constraints, thus the previous assumption is not met in these systems. Hence, event-triggered communication is an alternative to use the bandwidth efficiently, reduce energy consumption, and leverage resources in this layer [46, 47]. In [46], it is shown a secondary control strategy for frequency synchronization and voltage restoration with event-triggered communication. Authors claim that this control strategy achieves control objectives while reducing the number of control actions and communication among microgrids. In [47], it is proposed a distributed secondary control scheme for active power-sharing and frequency regulation with event-triggered communication, and their results show good performance.
2.3 Cybersecurity models
considering that NMGs are naturally cyber-physical systems, they could be exposed to cybersecurity vulnerabilities [48]. Some cybersecurity approaches have been proposed as a possible solution to this issue, as it is shown in this section.
2.3.1 Quantum cybersecurity
The current communication protocols ensure information security using complex mathematical problems. Contemporary problems allow proposing safe keys to encrypt the information to be shared, since they can not be solved efficiently by modern computers. However, the appearance of quantum computers compromises the security of these protocols because they can solve the aforementioned mathematical problems. Hence, new communication protocols have been proposed based on quantum laws. Thus, communication is assured. In [49], it is studied how to deal with a DoS attack when a communication protocol based on a distributed quantum key is used and proposes a strategy to overcome this issue.
2.3.2 Blockchain cybersecurity
Blockchain technology is another proposal to ensure security in the communication layer of NMGs. Its use allows the exchange of information among different MGs safely and transparently [50]. This technology also enhances the robustness against threats such as cyber-attacks [50]. In [48], it is claimed that blockchain will have a relevant role in active distribution systems In [48], it is proposed a decentralized transactive energy management system for NMGs at the power distribution level using blockchain technology.
In the next section, it is introduced the main concepts of traditional control architectures in NMGs.
2.4 Overview of control strategies for NMGs
In this section, we introduce a brief overview of the control strategies for NMGs. First, we present the structure of the multilayer architecture. Then, some variations of the traditional hierarchical architecture are discussed. The control layers in MGs have distinct responsibilities. For example, the primary layer stabilizes the MG, while the secondary layer restores voltage or frequency in self-governing mode. Hierarchical control is considered the practical architecture in MGs, especially in isolated operation mode. This is due to the pre-existing control layers and communication infrastructure. Hierarchical control has been developed for interconnected MGs, considering challenges such as power exchange during real-time operation. While the primary control level remains consistent for both isolated and interconnected MGs, the secondary control level is adapted to enable coordinated control and optimal sharing of resources among the participating MGs. This involves the development of communication protocols, decentralized decision-making algorithms, and coordinated control strategies to ensure effective energy management and system stability across the network. Similarly, the tertiary or global control level in NMGs is restructured to facilitate system-level coordination, market mechanisms, and demand-response programs, considering the interconnected nature of the microgrids. By tailoring the secondary and tertiary control levels to the specific needs of NMGs, efficient and coordinated operation can be achieved, enabling enhanced energy sharing, improved stability, and effective integration of renewable resources. Although NMGs present several advantages, controlling the power flow between MGs properly is not a trivial task. For that reason, the control of NMGs has been an area of research in recent years [51]. First, we should briefly explain the common hierarchical control structure of MGs, initially introduced in [52] and then established in standards for the operation of microgrids such as IEEE 2030.7-2017 [53] and IEC TS 62898-2: 2018. The general scheme is shown in Fig. 4, where the level zero control, the primary control, and the secondary control are presented:
-
1.
Internal loops or level zero control: This level is related to the generation process, i.e., to the amount of voltage and current provided by the power electronic interface to the common bus (or tie-line). It is formed by two loops: An internal current loop and an external voltage loop, which act directly on the switches to track sinusoidal voltage/current references.
-
2.
Primary control: This level provides the sinusoidal voltage/current references to the internal loops. Depending on the distributed generator (DG) operation mode as a grid forming or grid following, it can have two different control objectives: (a) In grid forming mode, DG changes the amplitude and frequency of the voltage reference to achieve proper power-sharing. To accomplish this task, a very common and widely used control concept is the droop control [54]. (b) In grid following mode, it changes the amplitude and frequency of the voltage reference to guarantee that reactive power Q tends to zero (unitary power factor), and P reaches the maximum point power tracking.
-
3.
Secondary control: This level corrects the deviations caused by the primary control, regulating the voltage amplitude and frequency to their nominal values. Also, in AC MGs, this level is responsible for proper synchronization between the DG and the main grid.
-
4.
Tertiary control: This level manages the import and export of P and Q between the MG and the main grid and/or between other MGs. This power flow management consists of two modules: The first one is the control strategy that ensures that the MGs follow specific power references. The second one is usually an EMS, which generates the proper power references for each MG using an optimization algorithm that minimizes some cost function (often a generation cost function).

Common control structure for MGs. Level zero control in orange, primary control in green, and secondary control in yellow

Centralized structure for tertiary level
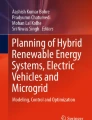
As this paper is related to the EMS in NMGs, it is focused on the tertiary control, with a brief mention of the other control levels when necessary for understanding purposes. Figure 5 shows the schematic structure of the centralized scheme for the tertiary control level. The communication network (COM Network) allows the sending of all the necessary information to the global central controller (GCC), which performs the objectives of the tertiary control level. This scheme can provide an optimal operation; however, its main drawback is its single-point failure characteristic. Nonetheless, with the increased performance and reliability in communications, this drawback is becoming less relevant. This scheme aims to send the proper voltage correction terms to the secondary control to guarantee the desired power flow between MGs according to an optimization algorithm, which takes into account all necessary information from MGs such as the state of charge (SoC) of the batteries, generation and load forecasting, rated power from DGs and power limits, and market prices.
Controlling NMGs involves various objectives, such as preventing emergency conditions, improving network features, optimizing power management, and enhancing stability and communication factors. Several control methods, including power exchange and sharing among synchronous interconnected MGs, have been proposed to improve specific control indices, stability, and communication factors [51]. By strategically reconfiguring the distribution network, several benefits can be achieved. These include improved overall system reliability through the creation of redundant paths, enhanced controllability by enabling optimal coordination and control of distributed energy resources, increased scalability to accommodate the integration of additional microgrids, improved energy efficiency through reduced transmission losses, lower reserve requirements due to distributed generation and load balancing, and cost minimization through optimized resource allocation and utilization. The reconfiguration of distribution networks serves as a valuable tool to realize the advantages of NMGs and to optimize the operation and performance of the overall energy system [51]. Other control methods aim to optimize power allocation while considering economic constraints [4], low inertia and dynamic stability [55], and improve communication factors such as decreasing communication load using event-triggered methods, and addressing packet loss and communication failures [51].
In [56], it is proposed a distributed scheme for power flow between MGs by controlling the isolated bidirectional DC/DC converters (IBDCs). Defining \(IBDC_{ik}\) as the IBDC used to interconnect MG-i and MG-k, the control strategy uses information from the secondary control in combination with the voltage output of these two MGs to generate a power error term that is then processed by a PI controller. The obtained term is compared with the filtered power reference to generate a power tracking error, which is processed by another PI controller to generate the control action that is sent to the IBDC. However, how the power flow references are generated is not specified.

Generalized structure for hybrid NMG
A generalized schematic of the interconnection for hybrid (DC/AC) NMGs is presented in Fig. 6. The tertiary control is accomplished by controlling the back-to-back interlinking converters (BTBCs). These BTBCs allow interconnection between AC and DC MGs and between AC MGs with different operating frequencies. In [63], it is introduced a distributed control scheme based on BTBCs to match the power between the DC and AC MGs. The intra-microgrid control uses a distributed scheme to achieve, via consensus, proper voltage levels. The inter-microgrid control has a current loop based on the active and reactive power demand to generate the proper signal to the BTBC and supply the required power. The active and reactive power references based on demand are assumed, and there is no information about how they are determined. When connecting two MGs, they use two BTBCs linked by a DC-link, and the control of the power flow is made by changing the operating frequency in each BTBC according to the power offer and demand. This strategy allows interconnecting AC MGs with different voltage and frequency rated values and DC MGs. A different way to connect MGs is using an interlinking converter (ILC). The ILC is controlled using a double loop based on droop characteristics to control the power flow direction. One of the MGs will act as a source of energy and others as dynamic loads, depending on the requirements of each MG derived from voltage and frequency measurements. Bidirectional AC/DC converters are used to interconnect MGs in [64]. The authors proposed a reinforcement-learning-based online optimal control strategy for the hybrid ESS, improving its charge and discharge dynamics. Neural Networks are designed to estimate the nonlinear dynamics of HESS and learn the optimal control input for the bidirectional converters and, in that way, control the power flow between the MGs.
Finally, Table 1 presents an overview of the control strategies for networked microgrids illustrating the control approach and its communication architecture, and main features.
3 Energy management systems for networked microgrids
The EMS plays a crucial role in the functioning of NMG systems, whether they are operating in grid-connected or islanded modes. The primary responsibilities of the EMS include assigning generation references to every microgrid and controllable DGs, managing the controllable loads to regulate the power production and energy consumption within the system, and sharing surplus energy [36, 65]. Energy cooperation among MGs has emerged as a promising solution to attain resilient and cost-effective operations. By fostering collaboration and coordination between MGs, energy cooperation enables the sharing and exchange of energy resources, optimizing their utilization and enhancing overall system performance. This cooperative approach promotes resilience by allowing MGs to support each other during peak demand periods, supply disruptions, or system failures. Additionally, energy cooperation offers economic benefits by facilitating load balancing, reducing the need for costly infrastructure upgrades, and enabling the efficient integration of renewable energy sources [39, 66]. Furthermore, the MGs in an NMG could have different owners with shared or differing interests, making it essential for energy management to take various elements into account in a comprehensive and holistic approach. Managing and coordinating energy among MGs and DSO become increasingly complex due to various sources of interdependent and correlated uncertainty, including renewable resources, load variation, and the energy market. The EMS for the whole system shall promote dynamic energy trading stably and cost-effectively. Simultaneously, the EMS for individual MGs plays a crucial role in establishing external interactions with other MGs and internally coordinating the local power supply and demand [67]. Figure 7 shows a traditional EMS for NMGs indicating the main control signals between the EMS and MGs.

Traditional EMS for NMGs with the main control signals
In the context of NMGs, the costs incurred by a single microgrid during operation consist of not only the operational costs of its DGs, but also the expenses associated with purchasing electricity from the main grid and neighboring microgrids. On the other hand, a microgrid’s revenues are generated through the sale of electricity to neighboring microgrids and the main grid. Consequently, the energy trading activities of networked microgrids are interconnected through their respective variables and constraints. A general mathematical optimization problem for the EMS is defined as follows. Consider a set \(\mathcal {N}=\{1, 2, \ldots , N\}\) of NMGs in a distribution system. The EMS optimization problem can be expressed as
where \(C_i\) is the cost function produced by MG-i, \(B_i\) is the cost function caused by other variables in MG-i, such as transmission losses or environmental benefits, \(f_i\) represents the payment derived from trading energy with other microgrids and the main grid, \(p_{i}\) is the power generated by MG-i, \(p_d\) is the load of the system to be allocated to the NMGs, \(p_{ij}\) is the energy exchanged between MG-i and MG-j, \(x_i\) represents the other electrical variables such as voltage, current, temperature, etc., finally \(\overline{(\cdot )}\) and \(\underline{(\cdot )}\) stands for the upper and lower bounds of the variable capacities, respectively. It is also assumed bounds of the total energy to be exchanged, \(p_{exc}\). The energy resource allocation problem for NMG (1) involves coupled variables, such as the exchanged energy power or flow power constraints [68]. The mutual relationship between the objectives and/or constraints results in a highly complex optimization problem.
From a point of view of decision-making structures to solve optimization problem (1), EMS architectures can be categorized into four main types: centralized, hierarchical, distributed, and decentralized. Each architecture offers a unique approach to coordinating and controlling energy resources within a system.
-
1.
Centralized architecture: In a centralized energy management system, a central control entity has complete authority and control over all energy resources within the system. It collects data from various sources, makes decisions, and sends commands to control devices. This architecture provides a unified and integrated approach to energy management, allowing for optimized operation and coordination of resources. However, it may suffer from single-point vulnerabilities and scalability challenges.
-
2.
Hierarchical architecture: The hierarchical architecture divides the energy management system into multiple levels, each responsible for specific functions. At the top level, there is a central coordinator who sets high-level objectives and coordinates the lower levels. Lower levels handle localized control and management tasks, such as microgrids or individual devices. Hierarchical architectures enable scalable and modular designs, facilitating easier integration of new components. However, decision-making processes may be slower due to the multi-level coordination.
-
3.
Distributed architecture: In a distributed energy management system, decision-making authority is distributed among multiple entities or devices within the system. Each device has a degree of autonomy and makes local decisions based on local information. The devices communicate and collaborate to achieve system-level objectives. Distributed architectures offer increased resilience and adaptability, as they are less susceptible to single-point failures. They can also accommodate dynamic changes in the system. However, coordination and optimization across the system may be more challenging due to the decentralized decision-making.
-
4.
Decentralized architecture: The decentralized architecture combines aspects of both distributed and hierarchical approaches. It delegates decision-making authority to specific entities or control zones, allowing for local control and optimization. Each control zone may have its own hierarchical structure and decision-making processes. Decentralized architectures provide a balance between autonomy and coordination. They offer scalability, adaptability, and fault tolerance while allowing for localized decision-making. However, ensuring overall system-level optimization and coordination can be complex.
The choice of energy management system architecture depends on various factors such as the size and complexity of the system, the level of control required, scalability needs, and the desired trade-off between centralized decision-making and distributed autonomy. Each architecture has its advantages and challenges, and the selection should align with the specific requirements and characteristics of the energy system being managed. Figure 8 shows the EMS decision-making architectures: centralized, hierarchical, distributed, and decentralized and its interaction with DSO. Table 2 presents a comparison of the main approaches used for the EMS for NMGs with its decision-making architecture, features and challenges, communication complexity, and privacy preservation.

EMS decision-making architectures
In general, EMS looks for an optimal operation point to minimize the overall operation cost [21, 36, 71, 73]. For the economic dispatch solution, methods such as the lambda iteration method, stochastic, and dynamic programming strategies are handled to find a global or near-global solution. The EMS manages the RES and ESS to meet the power demand. It is also considered other aspects of the energy dispatch process such as costs, power limits, the lifetime of the system’s devices, and so on. When the EMS works closely with a communication system, it is possible to increase the penetration level of renewable energy and reduce operating costs. However, with the increase of energy resources, ESSs, or MGs in NMGs, the problem of energy management increases and becomes more complicated. Some distributed approaches to face this problem are based on dual decomposition, game theory, or ADMM [36]. In general, all different strategies for energy management can be classified into two fields: competitive and collaborative strategies. In competition, each entity in the system has its objectives and tries to find a set of actions to reach these objectives. This behavior causes the global system to converge to a Nash equilibrium, however, this equilibrium point could not be economically optimal. For this reason, collaborative strategies appear. In these strategies, entities in the system make joint choices to obtain collective payoffs appropriate for them [45, 73].
In the next subsections, the different EMS decision-making architectures are discussed. Figure 9 illustrates the main EMS decision-making approaches identified for NMGs. On one hand, we have model-based methods such as distributed optimization based on consensus algorithms, game theory, and MPC algorithms. On the other hand, we have identified data-driven methods whose main feature is the lack of a model of the system to perform energy management. In particular, data-driven optimization methods have recently emerged as powerful frameworks to deal with uncertainties such as robust, stochastic, and distributionally robust optimization algorithms. Alternatively, several machine learning algorithms such as neural networks and reinforcement learning have emerged as promising approaches to deal data-driven applications.

EMS decision-making approaches
3.1 Centralized EMS for NMGs
Centralized EMS have emerged as a vital component in the operation and optimization of networked microgrids. As the demand for efficient and sustainable energy solutions continues to rise, these systems are fundamental in coordinating and controlling energy generation, storage, and consumption within microgrid networks. By integrating advanced technologies such as real-time monitoring and intelligent decision-making algorithms, centralized energy management systems enable effective coordination of distributed energy resources, enhance grid stability, and facilitate optimal energy utilization.
In [22], it is proposed a strategy that uses a market policy to manage the import and export of power between each MG and the grid. This management is done via maximizing a profit function, defined as the difference between the revenue term (based on the power bought to the upstream network) and the expenses term (based on the cost for active power bought from the grid and compensations to DG sources). The revenue and expense terms are defined based on market prices, available generation, and local demand. This information is exchanged by a centralized distribution management system (DMS) connected to all the MGs in the NMG. In [57], authors proposed a GCC for the operation of NMGs. An energy management unit is used as a communication interface between the GCC and the MGs. A DNO provides certain power from non-renewable sources at a certain cost to the MGs. The GCC aims to generate the appropriate set points for all the DERs for optimizing the total benefits of the NMGs while satisfying the forecasted demand. This strategy is based on an MPC algorithm that considers the current state of the MGs and predicts a future horizon to generate the control action for that period. A different approach is presented in [81], where a voltage-frequency management technique (VFMT) is proposed as the tertiary control. This technique is an algorithm that aims to maintain each MG within the acceptable voltage and frequency limits by modifying the generator’s set points and the power injection/absorption of ESS. Also, it manages the connection and power flow between MGs depending on the status of each MG (overloaded or overgenerated). Finally, recent work including deep neural networks and model-free reinforcement learning has been proposed for the EMS in multi-microgrid [72].
3.2 Decentralized EMS for NMGs
In a distribution system with NMGs, cooperation among multiple MGs can lead to a reduction in the operating cost of the entire network. However, conflicts and competing interests may arise due to the goal of each MG to maximize its profit while sharing surplus renewable energy. This poses a challenge in making decisions that align with individual or group interests, considering the available information and capabilities of each MG. Game theory has emerged as a robust framework for developing cooperative power control strategies among interconnected MGs. Cooperative and non-cooperative game theory approaches have been used to tackle this problem in various settings. By leveraging game theory, it becomes possible to analyze and optimize the interactions and decision-making processes among MGs, enabling the establishment of cooperative agreements and the resolution of conflicts to achieve mutually beneficial outcomes [1, 29, 67, 69, 70, 82]. Cooperative game theory is commonly utilized in networked MGs to enable each MG to achieve greater benefits than operating alone, providing adequate control strategies in a cooperative framework. Moreover, coalitional game theory-based algorithms have been proposed to obtain additional benefits for MGs with varying requirements, as the cooperation structure offers clear benefits [29].
To ensure fair and effective energy trading among NMGs, a proposed incentive mechanism based on Nash bargaining offers a promising solution. This mechanism aims to distribute cooperative benefits equitably among microgrids by formulating an energy trading Nash bargaining problem. The problem considers the performance improvements of all microgrids as a product and incorporates constraints on energy exchange with the main grid and other microgrids. By utilizing coalitional game theory, the sharing and trading of renewable energy in smart interconnected households can be optimized, leading to the minimization of the total cost incurred by the microgrids. This approach enables the establishment of a balanced and efficient energy market, fostering cooperation and facilitating the adoption of renewable energy sources within networked microgrids [36]. The approach employed in this scenario involves distributing the worth or revenue of a coalition among its members based on a fairness rule. The worth or revenue represents the collective amount of cost savings achieved by the group. By implementing a fairness rule, each member of the coalition receives a fair share of the benefits, ensuring equitable distribution. This approach promotes cooperation and incentivizes active participation within the coalition, fostering a sense of fairness and encouraging collaborative efforts to achieve cost savings collectively. On the other hand, non-cooperative game theory involves multiple decision-making entities without any binding agreement between them. Each entity tries to maximize its benefits. Nash equilibrium provides a strategic framework for analyzing the decision-making process of buyer MGs and finding a stable state where no MG can unilaterally improve its outcome by deviating from its chosen energy demand strategy enabling a simultaneous, balanced, and efficient allocation of energy resources within NMGs, taking into account the individual demands and competitive dynamics among the participating MGs in the energy market.
3.3 Distributed EMS for NMGs
Assuming that Problem (1) satisfies some structural requirements such as convexity, separability, and decomposability (for ADMM), it can be rewritten using a Lagrangian function based on duality theory to relax the coupling in constraints. This is often done in energy distribution problems that have both coupling variables and coupling constraints. In such cases, a hierarchical primal-dual decomposition method is used, which transforms the centralized problem into N subproblems. The master problem updates the dual variables, which serve as shadow prices. Based on these dual variables, each subproblem can be solved independently, as it represents the optimal allocation problem for a single MG with its objectives and constraints. This allows parallel optimization of the subproblems, resulting in a mitigated computational burden [67, 68, 76, 83].
Recently, an EMS has been proposed to operate NMGs considering power flow equations for every subsystem for different types of topologies such as meshed and radial configurations, and avoiding centralized distribution system coordinator requirements. The proposed distributed optimization algorithm is built on the alternating direction method of multipliers [76]. Similarly, another approach focuses on an online energy management algorithm for the distribution system operator, utilizing regret minimization. Notably, this online algorithm is independent of predicted data, which helps overcome the challenge of inaccurate forecasting [24]. These advancements in EMS offer more efficient and reliable energy scheduling for networked microgrids while reducing the dependence on forecast data and improving overall system performance.

Common distributed structure for tertiary level
The distributed scheme is one of the most used for a tertiary level because of the advantages in terms of expandability and reliability against the centralized scheme, and also the advantages in terms of achieving an optimal operation against a decentralized scheme. A traditional consensus protocol is presented as follows
where \(a_{ij}\) is the weight between node i and j, \(X_i\) is the controlled variable (voltage, current, SoC, etc), C(s) is the controller (which usually implements a PI controller), \(e_V\) is the error variable term, \(\delta _V\) is the voltage correction term sent to the secondary control, and \(\mathcal {N}_i\) is the set of MG neighbors of MG i. Figure 10 shows the common structure of the traditional distributed structure (2) for EMS.
On the other hand, considering again the EMS optimization problem (1), we can obtain the total cost function for a fixed time t as \(F=\sum _{i=1}^{N}F_i\), with each agent cost function is defined as
With these functions (3), we can use the general gradient-based distributed optimization algorithm to solve the EMS optimization problem as follows
with \(\eta ^t\) is stepsize and \(\mathcal {P}_{\mathcal {X}}\) is the projection onto the constraint set \(\mathcal {X}\) obtained from optimization Problem (1).
In [84], the control strategy uses a pinning strategy for secondary control to reach consensus in the voltage of the MGs that conform to the NMG system, taking into account a correction term that the leader nodes transmit to the pinning nodes into each MG. The leader nodes are the common buses of each MG. This correction term is provided by the tracking power error in the tie-line that is processed by a PI controller and then sent to the leader nodes in each MG. However, there is no mention of how the power reference in the tie-line is generated. Similarly, in [58], the strategy is strongly integrated with the secondary level and has two correction terms. The first module is used to regulate the voltage in each MG (centralized secondary scheme) and reach via consensus the nominal rated value for the average voltage in the NMG system. The second module is used to make a power flow control that aims to reach a consensus in the SoCs of the batteries of all the MGs over the NMG system. These two modules generate correction terms that are sent to the secondary control.
Additionally, a strategy to achieve a proper power flow can be based on the consensus of currents provided by each MG using a cooperative strategy to balance the currents in the NMG system. Using a voting protocol, the average of per-unit currents (per-unit current is the measured current over the rated current) is used to reach a consensus between MGs, processing the corresponding error term via a PI controller and sending this correction term to the secondary centralized control [85]. The per-unit averaged current is obtained using the communication network in the secondary level, and the error term is obtained as in (2). Similarly, in [61], it is implemented a strategy based on the averaged currents to achieve a proper power flow between MGs. However, the averaged current term is obtained via consensus estimation, and then compared with the measured current to generate the error term. In this case, a proportional gain is used to process the error term and generate the voltage correction term.
The distributed scheme in AC NMGs uses the same typical structure presented previously in Fig. 10 and (2). However, the variables used to reach consensus are usually the active power (P) and/or the reactive power (Q), and the correction term could be not only for voltage but for frequency too (\(\delta _{\omega }\)). In [62], it is proposed an unconventional droop-free strategy, which uses for the tertiary level a consensus error term based on the normalized active power (measured active power over the maximum rated active power). Then it is processed by a PI to generate the corresponding correction term to the frequency. On the other hand, considering DC NMGS, most of the strategies apply the consensus-based protocol to achieve synchronization in the MGs voltages, the MGs currents, and/or the SoCs of the batteries in the NMGs system. This scheme is usually integrated with a distributed secondary control, using in some cases the communication network or information from that level (e.g., variable averages, pinned nodes, leader nodes, among others).
A cluster-oriented control strategy is proposed in [60] to achieve a proper power flow between MGs cooperatively. This approach uses two layers: In the first one (intracluster), proportional droop control is used to reach power-sharing between DERs in the MG. The voltage and frequency reference values are achieved via a tracking consensus problem. These reference values are determined by the second layer (intercluster), which aims to regulate the voltage and frequency to its nominal operation range values and to achieve proper power-sharing between MGs based on the consensus error term of the normalized active and reactive power. In [74], it is also used as a distributed scheme for a secondary level that is integrated with the tertiary level via pinned nodes. The tertiary level uses graph theory to generate the voltage and frequency references for each MG based on the nominal values and to achieve good reactive power-sharing. The strategy aims to reach the nominal values for frequency and voltage via consensus, and the error consensus term related to the reactive power is introduced to modify the voltage reference. Recently, a fully distributed privacy-preserving EMS for NMG cluster has been introduced in [86], where the privacy issues are dealt by means of homomorphic encryption.
Finally, the energy management system can be approached from a bi-level control perspective [1, 75]. The first level is defined as distribution system control, which, by learning way, is based on reinforcement learning (RL) strategies for the DSO control. Commonly at this level, a regularization is defined through a least-squares function to obtain each microgrid’s optimal price. However, it does not intrinsically maximize its profit, but rather it iteratively maximizes the information of the entire system as a whole. The exact problem is to find the best retail price for all agents. The next level is defined as energy management. The DSO receives price information in a time window to solve (commonly) a nonlinear programming problem for price-based energy dispatch, including price constraints, to determine the active and reactive power of distribution in the PCC. It is essential to consider a direct relationship between the solution of the optimization problems at each level due to the price-dispatch relationship. The bi-level formulation can be alternatively represented as a Stackelberg game, incorporating multiple followers within a problem that operates in two distinct time scales, where the leader agent is in the upper-level. To solve the bilevel optimization problem, distributed population games offer a suitable approach. Unlike consensus-based methods, distributed population game-theoretical techniques have emerged as a flexible framework for effectively coordinating the operation of networked devices [87]. Leveraging this approach offers several advantages, including improved real-time operation and enhanced robustness in the face of variations in environmental conditions.
4 Perspectives on intelligent EMS for NMGs
The path to a smarter grid is still facing several challenges for optimal energy management with the inclusion of heterogeneous DERs. With thousands of devices accessing the communication networks to negotiate energy in real-time, a centralized control entity responsible for managing the energy transaction will not be possible. Hierarchical distributed controllers of NMGs systems at different time scales with minimum information traffic are expected to be deployed to ensure the safe and reliable real-time operation of future distribution systems. Fully distributed energy management schemes are deemed particularly well-suited for NMGs as they facilitate efficient and effective energy sharing through simplified and autonomous approaches. We anticipate that these schemes will take center stage in future MGs research, serving as a focal point for advancements in this field.
In the era of data-oriented networks, the utilization of data-driven modeling techniques and machine learning methods holds immense potential. Drawing inspiration from existing literature such as [77,78,79,80, 88] these modeling ideas can be effectively applied to refine energy management in NMGs. Data-driven learning algorithms have proven valuable in tasks such as MG energy management considering diverse environment conditions, real-time detection of cyberattacks in peer-to-peer NMGs energy markets, and modeling of DERs and loads in islanded MGs. By harnessing the power of data and intelligent algorithms, these approaches pave the way for efficient and optimized energy systems in the evolving landscape of smart grids [88, 89]. Besides traditional DERs, new multi-energy systems will be supplying diverse kinds of energy to the NMGs. On the other hand, a crucial factor to be considered in the future implementation of NMGs is the uncertainty at all levels, from incomplete modeling to variable load predictions, risk-aware methods for optimal energy management have to be developed for the NMGs to deal with these uncertainties. In contrast, all these emerging applications of data-driven modeling lead to some challenges in dealing with collecting, processing, and storing the large amount of data produced by NMGs. Efficient data handling is crucial in managing the large amount of data produced by microgrids. Utilizing advanced data collection systems, such as IoT devices and sensors, helps gather real-time data on energy consumption, generation, and grid conditions. Cloud-based storage solutions and distributed databases can be employed to store and process this data, ensuring accessibility and scalability. Cloud computing is a viable strategy to address the computational cost of optimization algorithms in networked microgrids. Cloud platforms provide scalable and on-demand computational resources, allowing EMS to perform complex optimization tasks efficiently.
In the context of control strategies, several challenges have been envisioned. For instance, to enhance power exchange among MGs and to incorporate additional considerations ensuring cyber-security in control communication, promoting resilience, and maintaining power quality, new data-driven control approaches such as machine learning are emerging to deal with these control objectives. Particularly in the case of intelligent microgrids, which are inherently more vulnerable, it becomes essential to bolster their resilience against cyber-physical disasters and large-scale disturbances. This necessitates a reevaluation of their modeling, stability, and control mechanisms employing resilient control strategies. Optimization techniques in communication-based controllers, such as event/time-triggered approaches, can further contribute to reliable, accurate, and cost-effective performance. By incorporating these considerations, the power exchange and control within MGs and NMGs can be significantly improved, paving the way for more robust and secure energy systems.
In distribution systems with NMGs, the correlation of renewable energy generation within a limited geographical area, coupled with the unpredictable arrivals and departures of electric vehicles, gives rise to spatial-temporal uncertainties. It becomes crucial to incorporate these uncertainties into system modeling to enhance accuracy. A significant research direction for the future lies in achieving effective energy sharing within this interconnected and multivariate environment. Addressing the challenges posed by these uncertainties and developing strategies for successful energy sharing will remain key focal points in upcoming research endeavors. Given the stochastic nature of power-related variables such as renewable resources and load demand, as well as market-related variables like prices in NMGs, online optimal algorithms hold great promise for energy scheduling. The research emphasis in online algorithm development should be placed on lowering computational complexity while attaining robust convergence performance that aligns closely with offline global results. By addressing these challenges, online optimal algorithms can significantly contribute to efficient and effective energy scheduling in NMGs, ensuring optimal resource utilization and enhancing overall system performance.
Energy management in NMGs must account for the divergent requirements of both users and energy utilities while safeguarding privacy concerns. It is imperative that the developed optimal strategies achieve fair energy allocation that satisfies the requirements of all stakeholders. On the other hand, it is crucial to acknowledge the significance of reactive power within NMGs systems. Including reactive power in energy management considerations enhances the overall robustness and reliability of the system.
On the other hand, the power-to-x concept has emerged as an important framework to convert surplus electrical energy into other forms, such as hydrogen (Power-to-H2), synthetic fuels (Power-to-Fuels), or other valuable products. An advanced EMS in microgrids should integrate algorithms that can optimize power flows to support power-to-x applications. Addressing the computational cost of networked microgrid optimization involves leveraging cloud computing, implementing efficient data collection and storage mechanisms, integrating power-to-x concepts into EMS algorithms, ensuring smart grid compatibility, and prioritizing robust cybersecurity measures. These considerations collectively contribute to the effective and sustainable management of networked microgrids.
5 Conclusion
MGs have attractive features to benefit from renewable energy sources and encourage a more friendly generation system. Models for NMG and communications are crucial topics to obtain the maximum benefit from distributed generation. The interconnection among MGs can limit some of their characteristics or allow them to support each other. In NMGs, data sharing is necessary to reduce the generation cost and increase the stability and reliability of the system, among others. However, ensuring communication against faults or malicious attacks is also decisive in real-world applications. Therefore, this work shows an overview of models and communication architectures in MGs. From a control perspective, the centralized scheme offers the possibility of achieving an optimal operation in the NMGs system. Also, the single point of failure cannot represent a common scenario with the increasing performance and reliability in communications. A decentralized scheme avoids the single point of failure, provides high reliability, and reduces communication costs. However, an optimal power flow in NMGs is not possible to achieve. The distributed scheme offers a sensible option because it considers information from neighbors, but the single point of failure is avoided as it operates cooperatively. Also, a suboptimal operation can be achieved without the need for an energy management system. Finally, as the different schemes offer different features, choosing what scheme to use in the control of NMGs depends highly on the conditions and characteristics where the NMG system project will be implemented.
References
Baron-Prada, E., Mojica-Nava, E.: A population games transactive control for distributed energy resources. Int. J. Electr. Power Energy Syst. 130, 106874 (2021)
Sen, S., Kumar, V.: Microgrid modelling: a comprehensive survey. Annu. Rev. Control. 46, 216–250 (2018). https://doi.org/10.1016/j.arcontrol.2018.10.010
Mojica-Nava, E., Macana, C.A., Quijano, N.: Dynamic population games for optimal dispatch on hierarchical microgrid control. IEEE Trans. Syst. Man, Cybern. Syst. 44(3), 306–317 (2013)
Macana, C.A., Mojica-Nava, E., Pota, H.R., Guerrero, J., Vasquez, J.C.: Accurate proportional power sharing with minimum communication requirements for inverter-based islanded microgrids. Int. J. Electr. Power Energy Syst. 121, 106036 (2020)
Macana, C.A., Mojica-Nava, E., Pota, H.R., Guerrero, J., Vasquez, J.C.: A distributed real-time energy management system for inverter-based microgrids. Electr. Power Syst. Res. 213, 108753 (2022)
Behera, S., Choudhury, N.B.D.: Adaptive optimal energy management in multi-distributed energy resources by using improved slime mould algorithm with considering demand side management. e-Prime-Adv. Electr. Eng. Electron. Energy 3, 100108 (2023)
Behera, S., Dev Choudhury, N.B., Biswas, S.: Maiden application of the slime mold algorithm for optimal operation of energy management on a microgrid considering demand response program. SN Comput. Sci. 4(5), 491 (2023)
Shuai, Z., Peng, Y., Liu, X., Li, Z., Guerrero, J.M., Shen, Z.J.: Dynamic equivalent modeling for multi-microgrid based on structure preservation method. IEEE Trans. Smart Grid 10(4), 3929–3942 (2019). https://doi.org/10.1109/TSG.2018.2844107
Li, Y., Wang, Z., Yang, J., Wang, X., Feng, J.: Dynamic equivalence modeling for microgrid cluster by using physical-data-driven method. IEEE Trans. Appl. Supercond. 31(8), 1–4 (2021). https://doi.org/10.1109/TASC.2021.3091065
Cai, C., Liu, H., Tao, Y., Deng, Z., Dai, W., Chen, J.: Microgrid equivalent modeling based on long short-term memory neural network. IEEE Access 8, 23120–23133 (2020). https://doi.org/10.1109/ACCESS.2020.2966238
Xiao, H., Pei, W., Deng, W., Kong, L., Sun, H., Tang, C.: A comparative study of deep neural network and meta-model techniques in behavior learning of microgrids. IEEE Access 8, 30104–30118 (2020). https://doi.org/10.1109/ACCESS.2020.2972569
Sharifzadeh, M., Sikinioti-Lock, A., Shah, N.: Machine-learning methods for integrated renewable power generation: a comparative study of artificial neural networks, support vector regression, and gaussian process regression. Renew. Sustain. Energy Rev. 108, 513–538 (2019). https://doi.org/10.1016/j.rser.2019.03.040
Kumar, K.P., Saravanan, B.: Recent techniques to model uncertainties in power generation from renewable energy sources and loads in microgrids - a review. Renew. Sustain. Energy Rev. 71, 348–358 (2017). https://doi.org/10.1016/j.rser.2016.12.063
Ma, G., Li, J., Zhang, X.-P.: A review on optimal energy management of multimicrogrid system considering uncertainties. IEEE Access 10, 77081–77098 (2022)
Li, Z., Shahidehpour, M., Aminifar, F., Alabdulwahab, A., Al-Turki, Y.: Networked microgrids for enhancing the power system resilience. Proc. IEEE 105(7), 1289–1310 (2017). https://doi.org/10.1109/JPROC.2017.2685558
Alam, M.N., Chakrabarti, S., Ghosh, A.: Networked microgrids: state-of-the-art and future perspectives. IEEE Trans. Ind. Inf. 15(3), 1238–1250 (2019). https://doi.org/10.1109/TII.2018.2881540
Yan, L., Sheikholeslami, M., Gong, W., Shahidehpour, M., Li, Z.: Architecture, control, and implementation of networked microgrids for future distribution systems. J. Modern Power Syst. Clean Energy 10(2), 286–299 (2022)
Sahoo, S.K., Sinha, A.K., Kishore, N.K.: Control techniques in ac, dc, and hybrid ac-dc microgrid: a review. IEEE J. Emerg. Select. Top. Power Electron. 6(2), 738–759 (2018). https://doi.org/10.1109/JESTPE.2017.2786588
Toro, V., Tellez-Castro, D., Mojica-Nava, E., Rakoto-Ravalontsalama, N.: Data-driven distributed voltage control for microgrids: a Koopman-based approach. Int. J. Electr. Power & Energy Syst. 145, 108636 (2023)
Zhou, Q., Shahidehpour, M., Paaso, A., Bahramirad, S., Alabdulwahab, A., Abusorrah, A.: Distributed control and communication strategies in networked microgrids. IEEE Commun. Surv. Tutor. 22(4), 2586–2633 (2020). https://doi.org/10.1109/COMST.2020.3023963
Zhou, B., Zou, J., Chung, C.Y., Wang, H., Liu, N., Voropai, N., Xu, D.: Multi-microgrid energy management systems: architecture, communication, and scheduling strategies. J. Modern Power Syst. Clean Energy 9(3), 463–476 (2021). https://doi.org/10.35833/MPCE.2019.000237
Cagnano, A., De Tuglie, E., Mancarella, P.: Microgrids: overview and guidelines for practical implementations and operation. Appl. Energy 258, 114039 (2020). https://doi.org/10.1016/j.apenergy.2019.114039
Ahmed, M., Meegahapola, L., Vahidnia, A., Datta, M.: Stability and control aspects of microgrid architectures-a comprehensive review. IEEE Access 8, 144730–144766 (2020). https://doi.org/10.1109/ACCESS.2020.3014977
Ma, W.-J., Wang, J., Gupta, V., Chen, C.: Distributed energy management for networked microgrids using online admm with regret. IEEE Trans. Smart Grid 9(2), 847–856 (2018). https://doi.org/10.1109/TSG.2016.2569604
Ahl, A., Yarime, M., Tanaka, K., Sagawa, D.: Review of blockchain-based distributed energy: implications for institutional development. Renew. Sustain. Energy Rev. 107, 200–211 (2019). https://doi.org/10.1016/j.rser.2019.03.002
Vorobev, P., Huang, P., Al Hosani, M., Kirtley, J.L., Turitsyn, K.: High-fidelity model order reduction for microgrids stability assessment. IEEE Trans. Power Syst. 33(1), 874–887 (2018). https://doi.org/10.1109/TPWRS.2017.2707400
Wang, Y., Nguyen, T.-L., Xu, Y., Tran, Q.-T., Caire, R.: Peer-to-peer control for networked microgrids: multi-layer and multi-agent architecture design. IEEE Trans. on Smart Grid 11(6), 4688–4699 (2020). https://doi.org/10.1109/TSG.2020.3006883
Zargar, R.H.M., Yaghmaee, M.H.: Energy exchange cooperative model in sdn-based interconnected multi-microgrids. Sustain. Energy, Grids Netw. 27, 100491 (2021). https://doi.org/10.1016/j.segan.2021.100491
Wang, H., Huang, J.: Incentivizing energy trading for interconnected microgrids. IEEE Trans. Smart Grid 9(4), 2647–2657 (2018). https://doi.org/10.1109/TSG.2016.2614988
Wang, Y., Rousis, A.O., Strbac, G.: On microgrids and resilience: a comprehensive review on modeling and operational strategies. Renew. Sustain. Energy Rev. 134, 110313 (2020). https://doi.org/10.1016/j.rser.2020.110313
Parisio, A., Wiezorek, C., Kyntäjä, T., Elo, J., Strunz, K., Johansson, K.H.: Cooperative mpc-based energy management for networked microgrids. IEEE Trans. Smart Grid 8(6), 3066–3074 (2017). https://doi.org/10.1109/TSG.2017.2726941
Aboli, R., Ramezani, M., Falaghi, H.: A hybrid robust distributed model for short-term operation of multi-microgrid distribution networks. Electr. Power Syst. Res. 177, 106011 (2019). https://doi.org/10.1016/j.epsr.2019.106011
Mariam, L., Basu, M., Conlon, M.F.: Microgrid: architecture, policy and future trends. Renew. Sustain. Energy Rev. 64, 477–489 (2016). https://doi.org/10.1016/j.rser.2016.06.037
Hu, J., Shan, Y., Guerrero, J.M., Ioinovici, A., Chan, K.W., Rodriguez, J.: Model predictive control of microgrids—an overview. Renew. Sustain. Energy Rev. 136, 110422 (2021). https://doi.org/10.1016/j.rser.2020.110422
Bullich-Massagué, E., Díaz-González, F., Aragüés-Peñalba, M., Girbau-Llistuella, F., Olivella-Rosell, P., Sumper, A.: Microgrid clustering architectures. Appl. Energy 212, 340–361 (2018). https://doi.org/10.1016/j.apenergy.2017.12.048
Zou, H., Mao, S., Wang, Y., Zhang, F., Chen, X., Cheng, L.: A survey of energy management in interconnected multi-microgrids. IEEE Access 7, 72158–72169 (2019). https://doi.org/10.1109/ACCESS.2019.2920008
Wong, Y.C.C., Lim, C.S., Rotaru, M.D., Cruden, A., Kong, X.: Consensus virtual output impedance control based on the novel droop equivalent impedance concept for a multi-bus radial microgrid. IEEE Trans. Energy Convers. 35(2), 1078–1087 (2020). https://doi.org/10.1109/TEC.2020.2972002
Kumar, D., Zare, F., Ghosh, A.: Dc microgrid technology: system architectures, ac grid interfaces, grounding schemes, power quality, communication networks, applications, and standardizations aspects. IEEE Access 5, 12230–12256 (2017). https://doi.org/10.1109/ACCESS.2017.2705914
Rahbar, K., Chai, C.C., Zhang, R.: Energy cooperation optimization in microgrids with renewable energy integration. IEEE Trans. Smart Grid 9(2), 1482–1493 (2018). https://doi.org/10.1109/TSG.2016.2600863
Tang, Z., Qin, Y., Jiang, Z., Krawec, W.O., Zhang, P.: Quantum-secure microgrid. IEEE Trans. Power Syst. 36(2), 1250–1263 (2021). https://doi.org/10.1109/TPWRS.2020.3011071
Han, Y., Zhang, K., Li, H., Coelho, E.A.A., Guerrero, J.M.: Mas-based distributed coordinated control and optimization in microgrid and microgrid clusters: a comprehensive overview. IEEE Trans. Power Electron. 33(8), 6488–6508 (2018). https://doi.org/10.1109/TPEL.2017.2761438
Alavi, S.A., Mehran, K., Hao, Y., Rahimian, A., Mirsaeedi, H., Vahidinasab, V.: A distributed event-triggered control strategy for dc microgrids based on publish-subscribe model over industrial wireless sensor networks. IEEE Trans. Smart Grid 10(4), 4323–4337 (2019). https://doi.org/10.1109/TSG.2018.2856893
Zhang, C., Wu, J., Zhou, Y., Cheng, M., Long, C.: Peer-to-peer energy trading in a microgrid. Appl. Energy 220, 1–12 (2018). https://doi.org/10.1016/j.apenergy.2018.03.010
Werth, A., André, A., Kawamoto, D., Morita, T., Tajima, S., Tokoro, M., Yanagidaira, D., Tanaka, K.: Peer-to-peer control system for dc microgrids. IEEE Trans. Smart Grid 9(4), 3667–3675 (2018). https://doi.org/10.1109/TSG.2016.2638462
Lai, J., Lu, X., Wang, F., Dehghanian, P., Tang, R.: Broadcast gossip algorithms for distributed peer-to-peer control in ac microgrids. IEEE Trans. Ind. Appl. 55(3), 2241–2251 (2019). https://doi.org/10.1109/TIA.2019.2898367
Lai, J., Lu, X., Yu, X., Monti, A.: Stochastic distributed secondary control for ac microgrids via event-triggered communication. IEEE Trans. Smart Grid 11(4), 2746–2759 (2020). https://doi.org/10.1109/TSG.2020.2966691
Ding, L., Han, Q.-L., Zhang, X.-M.: Distributed secondary control for active power sharing and frequency regulation in islanded microgrids using an event-triggered communication mechanism. IEEE Trans. Ind. Inf. 15(7), 3910–3922 (2019). https://doi.org/10.1109/TII.2018.2884494
Li, Z., Bahramirad, S., Paaso, A., Yan, M., Shahidehpour, M.: Blockchain for decentralized transactive energy management system in networked microgrids. Electr. J. 32(4), 58–72 (2019). https://doi.org/10.1016/j.tej.2019.03.008. (Special Issue on Strategies for a sustainable, reliable and resilient grid)
Tang, Z., Zhang, P., Krawec, W.O., Jiang, Z.: Programmable quantum networked microgrids. IEEE Trans. Quantum Eng. 1, 1–13 (2020). https://doi.org/10.1109/TQE.2020.3019738
Xu, W., Li, J., Dehghani, M., GhasemiGarpachi, M.: Blockchain-based secure energy policy and management of renewable-based smart microgrids. Sustain. Cities Soc. 72, 103010 (2021). https://doi.org/10.1016/j.scs.2021.103010
Naderi, M., Khayat, Y., Shafiee, Q., Blaabjerg, F., Bevrani, H.: Dynamic modeling, stability analysis and control of interconnected microgrids: a review. Appl. Energy 334, 120647 (2023)
Palizban, O., Kauhaniemi, K., Guerrero, J.M.: Microgrids in active network management-part i: hierarchical control, energy storage, virtual power plants, and market participation. Renew. Sustain. Energy Rev. 36, 428–439 (2014). https://doi.org/10.1016/j.rser.2014.01.016
IEEE standard for the specification of microgrid controllers. IEEE Std 2030.7-2017 1(1), 1–43 (2018) https://doi.org/10.1109/IEEESTD.2018.8340204
Tayab, U.B., Roslan, M.A.B., Hwai, L.J., Kashif, M.: A review of droop control techniques for microgrid. Renew. Sustain. Energy Rev. 76, 717–727 (2017). https://doi.org/10.1016/j.rser.2017.03.028
Hossain, M.J., Mahmud, M.A., Milano, F., Bacha, S., Hably, A.: Design of robust distributed control for interconnected microgrids. IEEE Trans. Smart Grid 7(6), 2724–2735 (2015)
Li, X., Guo, L., Li, Y., Hong, C., Zhang, Y., Guo, Z., Huang, D., Wang, C.: Flexible interlinking and coordinated power control of multiple dc microgrids clusters. IEEE Trans. Sustain. Energy 9(2), 904–915 (2018). https://doi.org/10.1109/TSTE.2017.2765681
Ouammi, A., Dagdougui, H., Dessaint, L., Sacile, R.: Coordinated model predictive-based power flows control in a cooperative network of smart microgrids. IEEE Trans. Smart Grid 6(5), 2233–2244 (2015). https://doi.org/10.1109/TSG.2015.2396294
Shafiee, Q., Dragičević, T., Vasquez, J.C., Guerrero, J.M.: Hierarchical control for multiple dc-microgrids clusters. IEEE Trans. Energy Convers. 29(4), 922–933 (2014). https://doi.org/10.1109/TEC.2014.2362191
Dörfler, F., Simpson-Porco, J.W., Bullo, F.: Breaking the hierarchy: distributed control and economic optimality in microgrids. IEEE Trans. Control Netw. Syst. 3(3), 241–253 (2016). https://doi.org/10.1109/TCNS.2015.2459391
Lai, J., Lu, X., Yu, X., Monti, A.: Cluster-oriented distributed cooperative control for multiple ac microgrids. IEEE Trans. Ind. Inf. 15(11), 5906–5918 (2019). https://doi.org/10.1109/TII.2019.2908666
Chen, Z., Yu, X., Xu, W., Wen, G.: Modeling and control of islanded dc microgrid clusters with hierarchical event-triggered consensus algorithm. IEEE Trans. Circuits Syst. I Regul. Pap. 68(1), 376–386 (2021). https://doi.org/10.1109/TCSI.2020.3033432
Toro, V., Mojica-Nava, E.: Droop-free control for networked microgrids. In: 2016 IEEE Conference on Control Applications (CCA), pp. 374–379 (2016). https://doi.org/10.1109/CCA.2016.7587860
Jena, S., Padhy, N.P.: Distributed cooperative control for autonomous hybrid ac/dc microgrid clusters interconnected via back-to-back converter control. In: 2020 IEEE Power Energy Society General Meeting (PESGM), pp. 1–5 (2020). https://doi.org/10.1109/PESGM41954.2020.9281505
Duan, J., Yi, Z., Shi, D., Lin, C., Lu, X., Wang, Z.: Reinforcement-learning-based optimal control of hybrid energy storage systems in hybrid ac-dc microgrids. IEEE Trans. Ind. Inf. 15(9), 5355–5364 (2019). https://doi.org/10.1109/TII.2019.2896618
Amarawardhana, K.N., Enshaei, H., Jayasinghe, S.D.: Review on constraint handling techniques for microgrid energy/power management systems. Energy Syst. (2022). https://doi.org/10.1007/s12667-022-00549-w
Jadhav, A.M., Patne, N.R., Guerrero, J.M.: A novel approach to neighborhood fair energy trading in a distribution network of multiple microgrid clusters. IEEE Trans. Ind. Electron. 66(2), 1520–1531 (2018)
Bui, V.-H., Hussain, A., Kim, H.-M.: A multiagent-based hierarchical energy management strategy for multi-microgrids considering adjustable power and demand response. IEEE Trans. Smart Grid 9(2), 1323–1333 (2016)
Gregoratti, D., Matamoros, J.: Distributed energy trading: the multiple-microgrid case. IEEE Trans. Ind. Electron. 62(4), 2551–2559 (2014)
Wang, Z., Chen, B., Wang, J., Begovic, M.M., Chen, C.: Coordinated energy management of networked microgrids in distribution systems. IEEE Trans. Smart Grid 6(1), 45–53 (2014)
Wang, Z., Chen, B., Wang, J., Kim, J.: Decentralized energy management system for networked microgrids in grid-connected and islanded modes. IEEE Trans. Smart Grid 7(2), 1097–1105 (2015)
Liu, T., Tan, X., Sun, B., Wu, Y., Tsang, D.H.K.: Energy management of cooperative microgrids: a distributed optimization approach. Int. J. Electr. Power & Energy Syst. 96, 335–346 (2018). https://doi.org/10.1016/j.ijepes.2017.10.021
Du, Y., Li, F.: Intelligent multi-microgrid energy management based on deep neural network and model-free reinforcement learning. IEEE Trans. Smart Grid 11(2), 1066–1076 (2019)
Karimi, H., Jadid, S.: Optimal energy management for multi-microgrid considering demand response programs: a stochastic multi-objective framework. Energy 195, 116992 (2020). https://doi.org/10.1016/j.energy.2020.116992
Wu, X., Xu, Y., He, J., Wang, X., Vasquez, J.C., Guerrero, J.M.: Pinning-based hierarchical and distributed cooperative control for AC microgrid clusters. IEEE Trans. Power Electron. 35(9), 9865–9885 (2020). https://doi.org/10.1109/TPEL.2020.2972321
Mojica-Nava, E., Ruiz, F., Baron-Prada, E.: Fully distributed transactive control considering pricing dynamics and network constraints. IEEE Trans. Smart Grid 14(2), 1566–1576 (2023)
Parra, O.I., Mojica-Nava, E., Ruiz, F.: Fully distributed energy management for networked microgrids with admm. In: 2022 IEEE Conference on Control Technology and Applications (CCTA), pp. 159–164 (2022)
Li, J., Khodayar, M.E., Wang, J., Zhou, B.: Data-driven distributionally robust co-optimization of p2p energy trading and network operation for interconnected microgrids. IEEE Trans. Smart Grid 12(6), 5172–5184 (2021)
Cao, Y., Li, D., Zhang, Y., Tang, Q., Khodaei, A., Zhang, H., Han, Z.: Optimal energy management for multi-microgrid under a transactive energy framework with distributionally robust optimization. IEEE Trans. Smart Grid 13(1), 599–612 (2021)
Ding, Y., Morstyn, T., McCulloch, M.D.: Distributionally robust joint chance-constrained optimization for networked microgrids considering contingencies and renewable uncertainty. IEEE Trans. Smart Grid 13(3), 2467–2478 (2022)
Cervera, E., Morales, P., Linares-Rugeles, S., Rivera, S., Mojica-Nava, E.: Distributionally robust optimization for networked microgrids: an overview. In: Workshop on Engineering Applications. Springer, pp. 311–323 (2023)
Arefi, A., Shahnia, F.: Tertiary controller-based optimal voltage and frequency management technique for multi-microgrid systems of large remote towns. IEEE Trans. Smart Grid 9(6), 5962–5974 (2018). https://doi.org/10.1109/TSG.2017.2700054
Mojica-Nava, E., Poveda, J.I., Quijano, N.: Stackelberg population learning dynamics. In: 2022 IEEE 61st Conference on Decision and Control (CDC), pp. 6395–6400 (2022)
Wang, Y., Mao, S., Nelms, R.M.: On hierarchical power scheduling for the macrogrid and cooperative microgrids. IEEE Trans. Ind. Inf. 11(6), 1574–1584 (2015)
Mudaliyar, S., Duggal, B., Mishra, S.: Distributed tie-line power flow control of autonomous dc microgrid clusters. IEEE Trans. Power Electron. 35(10), 11250–11266 (2020). https://doi.org/10.1109/TPEL.2020.2980882
Moayedi, S., Davoudi, A.: Distributed tertiary control of dc microgrid clusters. IEEE Trans. Power Electron. 31(2), 1717–1733 (2016). https://doi.org/10.1109/TPEL.2015.2424672
Yuan, Z.-P., Li, P., Li, Z.-L., Xia, J.: A fully distributed privacy-preserving energy management system for networked microgrid cluster based on homomorphic encryption. IEEE Trans. Smart Grid 15(2), 1735–1748 (2024)
Quijano, N., Ocampo-Martinez, C., Barreiro-Gomez, J., Obando, G., Pantoja, A., Mojica-Nava, E.: The role of population games and evolutionary dynamics in distributed control systems: the advantages of evolutionary game theory. IEEE Control Syst. Mag. 37(1), 70–97 (2017)
Cui, G., Jia, Q.-S., Guan, X.: Energy management of networked microgrids with real-time pricing by reinforcement learning. IEEE Trans. Smart Grid 15(1), 570–580 (2024)
Ceja-Espinosa, C., Pirnia, M., Cañizares, C.A.: An affine arithmetic-based energy management system for cooperative multi-microgrid networks. IEEE Trans. Smart Grid 15(2), 1317–1329 (2024)
Acknowledgements
This research was funded by Minciencias grant number CT 542-2020, “Programa de Investigación en Tecnologías Emergentes para Microrredes Eléctricas Inteligentes con Alta Penetración de Energías Renovables”.
Funding
Open Access funding provided by Colombia Consortium.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no Conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Rodriguez-Gil, J.A., Mojica-Nava, E., Vargas-Medina, D. et al. Energy management system in networked microgrids: an overview. Energy Syst (2024). https://doi.org/10.1007/s12667-024-00676-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12667-024-00676-6