
Abstract
This paper carries out the bifurcation analysis of the Lakshmanan–Porsezian–Daniel model. The phase portrait analysis is carried out and the soliton solutions naturally emerge from the scheme. The intermediary functions are the Jacobi’s elliptic functions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
One of the models to address the dispersive optical solitons is the Lakshmanan–Porsezian–Daniel (LPD) model with Kerr law of nonlinear refractive index [1,2,3]. A wide range of results have been recovered for the LPD model in the past [4,5,6]. To touch base on these works, LPD equation has been integrated using a large number of integration algorithms [7,8,9]. The model was later studied with power-law of self-phase modulation [10,11,12]. The conservation laws were identified [13]. The perturbed version of LPD model was also integrated using the semi-inverse variation when the light intensity was taken to be arbitrary [14,15,16]. Subsequently, the cubic–quartic version of LPD equation was closely looked upon with Kerr and power laws of nonlinear refractive index [17,18,19]. Their soliton solutions in presence of perturbation terms for arbitrary refractive index was also reported [20,21,22]. Thereafter, the LPD equation was taken up for nonlinear chromatic dispersion that yielded quiescent optical solitons [23,24,25]. In this context the two forms of self-phase modulation were considered namely the Kerr law and the power law [26,27,28]. In addition to the aforementioned analytical approaches, the model was also studied numerically to retrieve the bright and dark optical solitons [29,30,31,32,33]. The applied methodology was the Laplace-Adomian decomposition. The current paper moves ahead and addresses the LPD equation from a totally different perspective. The bifurcation analysis of the model will be carried out and the recovered bright and dark soliton solutions will be revealed and exhibited. The intermediary functions that emerged are the cnoidal and snoidal waves. The details of the analysis are displayed in the rest of the paper after a succinct revisitation to the model.
In the current work, the corresponding LPD equation with the nonlinear CD, which can be expressed in its dimensionless form:
where \(u=u(x,t)\) is the complex-valued wave function, which represents the wave profile. x represents the normalized propagation and t denotes the retard time. The remaining coefficients are real valued and \(i^{2}=-1\). The coefficient \(a_{1}\) stands for the chromatic dispersion (CD). Nonzero constant \(a_{2}\) stands for the self-phase modulation stemming from the Kerr law for nonlinear refractive index. The coefficient \(a_{3}\) denotes the fourth-order dispersion (4OD) and nonzero constant r is associated with quintic nonlinearity. Nonzero constants \(\beta _{i}\) \((i=1..,4)\) represent the nonlinear dispersion and the related physical phenomena. Moreover, the power-law nonlinearity factor n denotes departure from the linear chromatic dispersion (CD). \(u_{t}\) stands for the linear temporal evolution of the soliton pulse. \(u_{x}\) and \(u_{xxxx}\) denotes the first-order and fourth-order spatial dispersions. Last but not the least, \(u^{*}\) and \(u^{*}_{xx}\) stand for the complex conjugates of the wave field and the CD, respectively. This system will be used to reveal stationary solitons.
Dynamical behaviors and phase portraits for model (1)
In order to construct the traveling wave solutions of the LPD model (1), we firstly decompose
where \(\Psi (x)\) denotes the real-valued function, which stands for the amplitude component of the stationary wave. The coefficient \(\mu\) represents the wave number of the solitons. Inserting (2) into (1) and transforming it to an ordinary differential equation
For integrability, Equation (3) provides certain restrictions when the coefficients of its linearly independent functions are set to zero
along with
and
Depend on the above restrictions, this simplifies the LPD model (1) in the following form
Therefore, the ordinary differential system given by Eq. (1) is transformed as follows
where \(\Psi '(x)\) and \(\Psi ''(x)\) stand for respectively the first-order and second-order dispersions of the soliton. Equation (8) can be rewritten in the following form
where the above constants are \(N_{1}=-\frac{\mu }{a_{1}}\), \(N_{2}=\frac{a_{2}}{a_{1}}\), \(N_{3}=-\frac{r}{a_{1}}\).
For Eq. (9), denote that \(\Psi '=p\), then (9) can be transformed as a plane dynamical system
with the Hamiltonian system
According to the Eq. (11), we deduce
For convenience, denote \(G_{h}(\Psi )=-\frac{N_{1}}{2}\Psi ^{2}-\frac{N_{2}}{4}\Psi ^{4}-\frac{N_{3}}{6}\Psi ^{6}+h\), it is notable that \(G_{h}(0)=h\), \(G_{h}(\Psi _{1})=G_{h}(\Psi _{2})=h+h_{0}\), \(G_{h}(\Psi _{3})=G_{h}(\Psi _{4})=h-h_{1}\). Here, \(\Psi _{1}\), \(\Psi _{2}\), \(\Psi _{3}\) and \(\Psi _{4}\) are the real root of the function \(G_{h}(\Psi )\).
Here, we derive that
and
where \(N^{2}_{2}-4N_{1}N_{3}>0\).
By using the bifurcation theory of planar differential system [6, 7], we know that
-
(i)
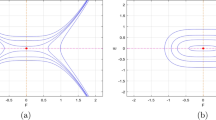
If \(N^{2}_{2}-4N_{1}N_{3}<0\) \((N_{1}>0, N_{3}>0)\), it is notable that there exists only one equilibrium \(M_{0}(0,0)\), which represents the center point. The corresponding phase portraits is shown in Fig. 1a.
-
(ii)
If \(N^{2}_{2}-4N_{1}N_{3}<0\) \((N_{1}<0, N_{3}<0)\), we observe that there is only one equilibrium point \(M_{0}(0,0)\), which represents the saddle point. The corresponding phase portraits can be seen in Fig. 1b.
-
(iii)
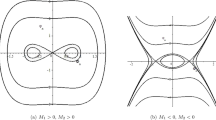
If \(N_{1}>0\), \(N_{3}<0\), there are three equilibrium points \(M_{0}(0,0)\), \(M_{1}(\sqrt{\frac{N_{2}+\sqrt{N^{2}_{2}-4N_{1}N_{3}}}{-2N_{3}}},0)\) and \(M_{2}(-\sqrt{\frac{N_{2}+\sqrt{N^{2}_{2}-4N_{1}N_{3}}}{-2N_{3}}},0)\), which \(M_{0}\) stands for the center point, \(M_{1}\) and \(M_{2}\) represent the saddle points, respectively. The corresponding phase diagram is shown in Fig. 2a.
-
(iv)
If \(N_{1}<0\), \(N_{3}>0\), we derive that there exist three equilibrium points of system (10), which include \(M_{0}(0,0)\), \(M_{3}(\sqrt{\frac{-N_{2}+\sqrt{N^{2}_{2}-4N_{1}N_{3}}}{2N_{3}}},0)\) and \(M_{4}(-\sqrt{\frac{-N_{2}+\sqrt{N^{2}_{2}-4N_{1}N_{3}}}{2N_{3}}},0)\). We find that \(M_{0}\) denotes the saddle point, \(M_{3}\) and \(M_{4}\) represent the center points. The corresponding phase portraits can be seen in Fig. 2b.

The bifurcation phase portraits of system (10)

The bifurcation phase portraits of system (10)
Case 1 From the situation (iii), we derive that there are two heteroclinic orbits connects two saddle points and a center point. With the help of the dynamical theory of differential systems [6, 7], we deduce the kink-shaped solitary wave solutions takes the form (See Fig. 3)
where \(\Xi _{1}=\sqrt{\frac{N_{2}+\sqrt{N^{2}_{2}-4N_{1}N_{3}}}{-2N_{3}}}\), \(\Xi _{2}=\sqrt{\frac{N_{2}-\sqrt{N^{2}_{2}-4N_{1}N_{3}}}{2N_{3}}}\) and \(\xi _{0}\) is the integral constant.

The portraits of u(x, t) in Eq. (15) at \(\Xi _{1}=1\), \(\Xi _{2}=2\), \(N_{3}=-3\), \(\xi _{0}=0\)
Case 2 According to the case (iii), we find that the LPD system (1) exists the periodic wave solutions, which corresponding to the periodic orbit (see Fig. 2a). With the help of the dynamical theory of differential systems [6, 7], the periodic wave solutions of (1) takes the form
where \(\xi _{0}\) is the integral constant, \(\Xi _{3}\), \(\Xi _{4}\) and \(\Xi _{5}\) satisfy the relations as follows
Case 3 According to the case (iv), we observe that there exists two families of homoclinic orbits enclose to two equilibrium points. By using the dynamical theory of differential systems [6, 7], the bell-shaped solitary wave solutions of system (1) takes the form (See Fig. 4)
where \(\xi _{0}\) is the integral constant and \(\varepsilon =\pm 1\).

The portraits of u(x, t) in Eq. (18) at \(N_{1}=-1\), \(N_{2}=\frac{4}{3}\), \(N_{3}=\varepsilon =1\), \(\xi _{0}=0\)
Conclusions
The current paper studied the bifurcation analysis of the LPD model with Kerr law of self-phase modulation. The results are quite revealing and the soliton solutions have emerged from the analysis. These are dark and bright 1-soliton solutions. These encouraging results pave ways for continuing the work far and beyond the present situation. In future the model will be addressed with power-law of self-phase modulation, and subsequently the chromatic dispersion will be replace with cubic-quartic version if the model which will be later studied with Kerr and power laws of self-phase modulation. Those results will be disseminated with time. In the long run, the model will be addressed with polarization-mode dispersion and with dispersion-flattened fibers whose bifurcation analysis will be later available. These results and other advanced analysis with their novel results will be later made visible after aligning the results with the pre-existing works [34,35,36,37,38,39].
References
A.R. Adem, A. Biswas, Y. Yıldırım, A.S. Alshomrani, Implicit quiescent optical solitons For Lakshmanan–Porsezian–Daniel model having nonlinear chromatic dispersion and power-law of self-phase modulation by lie symmetry. J. Opt. (2024). https://doi.org/10.1007/s12596-023-01623-x
K.K. Al-Kalbani, K.S. Al-Ghafri, E.V. Krishnan, A. Biswas, Optical solitons and modulation instability analysis with Lakshmanan-Porsezian-Daniel model having parabolic law of self-phase modulation. Mathematics 11(11), 2471 (2023)
O. González-Gaxiola, A. Biswas, Y. Yildirim, H.M. Alshehri, Numerical simulation of cubic-quartic optical soliton perturbation with Lakshmanan-Porsezian-Daniel model by Laplace-Adomian decomposition. Optoelectr. Adv. Mater.-Rapid Commun. 16, 336–341 (2022)
A.A. Al Qarni, A.M. Bodaqah, A.S.H.F. Mohammed, A.A. Alshaery, H.O. Bakodah, A. Biswas, Dark and singular cubic-quartic optical solitons obtained with the Lakshmanan- Porsezian-Daniel equation by an improved Adomian decomposition scheme. Ukr. J. Phys. Opt. 24, 46–61 (2023). https://doi.org/10.3116/16091833/24/1/46/2023
L. Tang, A. Biswas, Y. Yildirim, A.A. Alghamdi, Bifurcation analysis and optical solitons for the concatenation model. Phys. Lett. A 480, 128943 (2023)
J.B. Li, H.H. Dai, On the study of singular nonlinear traveling wave equations: dynamical system approach (Science Press, Beijing, 2007)
J.B. Li, Singular nonlinear traveling wave equations: bifurcation and exact solutions (Science Press, Beijing, 2013)
L. Tang, Bifurcation analysis and multiple solitons in birefringent fibers with coupled Schrödinger-Hirota equation. Chaos, Solitons Fractals 161, 112383 (2022)
L. Tang, Bifurcation studies, chaotic pattern, phase diagrams and multiple optical solitons for the (2+1)-dimensional stochastic coupled nonlinear Schrödinger system with multiplicative white noise via Itô calculus. Results Phys. 52, 106765 (2023)
L. Tang, Dynamical behavior and multiple optical solitons for the fractional Ginzburg-Landau equation with β-derivative in optical fibers. Opt. Quant. Electron. 56, 175 (2024)
L. Tang, Bifurcations and optical solitons for the coupled nonlinear Schrödinger equation in optical fiber Bragg gratings. J. Opt. 52(3), 1388–1398 (2023)
A. Ankiewicz, N. Akhmediev, Higher-order integrable evolution equation and its soliton solutions. Phys. Lett. A 378, 358–361 (2014)
A. Ankiewicz, Y. Wang, S. Wabnitz, N. Akhmediev, Extended nonlinear Schrödinger equation with higher-order odd and even terms and its rogue wave solutions. Phys. Rev. E 89, 012907 (2014)
T.L. Belyaeva, V.N. Serkin, Wave-particle duality of solitons and solitonic analog of the Ramsauer-Townsend effect. Eur. Phys. J. D 66(6), 1–9 (2012)
H. Triki, Y. Sun, Q. Zhou, A. Biswas, Y. Yildirim, H.M. Alshehri, Dark solitary pulses and moving fronts in an optical medium with the higher-order dispersive and nonlinear effects. Chaos, Solitons & Fractals 164, 112622 (2022)
Q. Zhou, Influence of parameters of optical fibers on optical soliton interactions. Chin. Phys. Lett. 39(1), 010501 (2022)
S. Wang, Novel soliton solutions of CNLSEs with Hirota bilinear method. J. Opt. 52(3), 1602–1607 (2023)
B. Kopçasız, E. Yaşar, The investigation of unique optical soliton solutions for dual-mode nonlinear Schrödinger’s equation with new mechanisms. J. Opt. 52(3), 1513–1527 (2023)
T.N. Thi, L.C. Van, Supercontinuum generation based on suspended core fiber infiltrated with butanol. J. Opt. 52(4), 2296–2305 (2023)
Z. Li, E. Zhu, Optical soliton solutions of stochastic Schrödinger-Hirota equation in birefringent fibers with spatiotemporal dispersion and parabolic law nonlinearity. J. Opt. (2023). https://doi.org/10.1007/s12596-023-01287-7
T. Han, Z. Li, C. Li, L. Zhao, Bifurcations, stationary optical solitons and exact solutions for complex Ginzburg-Landau equation with nonlinear chromatic dispersion in non-Kerr law media. J. Opt. 52(2), 831–844 (2023)
L. Tang, Phase portraits and multiple optical solitons perturbation in optical fibers with the nonlinear Fokas-Lenells equation. J. Opt. 52(4), 2214–2223 (2023)
S. Nandy, V. Lakshminarayanan, Adomian decomposition of scalar and coupled nonlinear Schrödinger equations and dark and bright solitary wave solutions. J. Opt. 44, 397–404 (2015)
W. Chen, M. Shen, Q. Kong, Q. Wang, The interaction of dark solitons with competing nonlocal cubic nonlinearities. J. Opt. 44, 271–280 (2015)
S.L. Xu, N. Petrović, M.R. Belić, Two-dimensional dark solitons in diffusive nonlocal nonlinear media. J. Opt. 44, 172–177 (2015)
R.K. Dowluru, P.R. Bhima, Influences of third-order dispersion on linear birefringent optical soliton transmission systems. J. Opt. 40, 132–142 (2011)
M. Singh, A.K. Sharma, R.S. Kaler, Investigations on optical timing jitter in dispersion managed higher order soliton system. J. Opt. 40, 1–7 (2011)
V. Janyani, Formation and propagation-dynamics of primary and secondary soliton-like pulses in bulk nonlinear media. J. Opt. 37, 1–8 (2008)
A. Hasegawa, Application of optical solitons for information transfer in fibers-a tutorial review. J. Opt. 33(3), 145–156 (2004)
A. Mahalingam, A. Uthayakumar, P. Anandhi, Dispersion and nonlinearity managed multisoliton propagation in an erbium doped inhomogeneous fiber with gain/loss. J. Opt. 42, 182–188 (2013)
S.A. AlQahtani, M.E. Alngar, R. Shohib, A.M. Alawwad, Enhancing the performance and efficiency of optical communications through soliton solutions in birefringent fibers. J. Opt. (2024). https://doi.org/10.1007/s12596-023-01490-6
A. Biswas, J. Edoki, P. Guggilla, S. Khan, A.K. Alzahrani, M.R. Belic, Cubic-quartic optical solitons in Lakshmanan-Porsezian-Daniel model derived with semi-inverse variational principle. Ukr. J. Phys. Opt. 22, 123–127 (2021)
Abdullahi Rashid Adem, Basetsana Pauline Ntsime, Anjan Biswas, Salam Khan, Abdullah Khamis Alzahrani, Milivoj R. Belic, Stationary optical solitons with nonlinear chromatic dispersion for Lakshmanan-Porsezian-Daniel model having Kerr law of nonlinear refractive index. Ukr. J. Phys. Opt. 22, 83–86 (2021)
E.M. Zayed, M.E. Alngar, R.M. Shohib, A. Biswas, Y. Yıldırım, L. Moraru, S. Moldovanu, P.L. Georgescu, Dispersive optical solitons with differential group delay having multiplicative white noise by ito calculus. Electronics 12(3), 634 (2023)
A.H. Arnous, A. Biswas, A.H. Kara, Y. Yıldırım, L. Moraru, S. Moldovanu, P.L. Georgescu, A.A. Alghamdi, Dispersive optical solitons and conservation laws of Radhakrishnan-Kundu-Lakshmanan equation with dual-power law nonlinearity. Heliyon 9(3), e14036 (2023)
E.M. Zayed, M. El-Horbaty, M.E. Alngar, R.M. Shohib, A. Biswas, Y. Yıldırım, L. Moraru, C. Iticescu, D. Bibicu, P.L. Georgescu, A. Asiri, Dynamical system of optical soliton parameters by variational principle (super-Gaussian and super-sech pulses). J. Eur. Opt. Soc.-Rapid Publ. 19(2), 38 (2023)
M.A. Shohib Reham, E.M. Alngar Mohamed, Biswas Anjan, Yildirim Yakup, Triki Houria, Moraru Luminita, Iticescu Catalina, Georgescu Puiu Lucian, Asiri Asim, Optical solitons in magneto-optic waveguides for the concatenation model. Ukr. J. Phys. Opt. 24, 248–261 (2023)
Ahmed H. Arnous, Biswas Anjan, Yildirim Yakup, Moraru Luminita, Iticescu Catalina, Georgescu Puiu Lucian, Asiri Asim, Optical solitons and complexitons for the concatenation model in birefringent fibers. Ukr. J. Phys. Opt. 24, 04060–04086 (2023)
Elsayed M. E. Zayed, Mohamed E. M. Alngar, Reham M. A. Shohib, Anjan Biswas, Yakup Yildirim, Luminita Moraru, Puiu Lucian Georgescu, Catalina Iticescu, Asim Asiri, Highly dispersive solitons in optical couplers with metamaterials having Kerr law of nonlinear refractive index. Ukr. J. Phys. Opt. 25, 01001–01019 (2024)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Tang, L., Biswas, A., Yıldırım, Y. et al. Bifurcations and optical soliton perturbation for the Lakshmanan–Porsezian–Daniel system with Kerr law of nonlinear refractive index. J Opt (2024). https://doi.org/10.1007/s12596-024-01938-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12596-024-01938-3