
Abstract
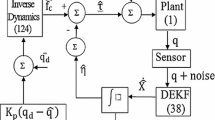
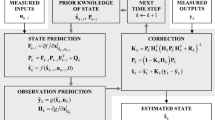
Independent joint control by disturbance observer schemes requires the information of an inertial mass and an angular acceleration of each joint of a robot manipulator in a real-time fashion. When both the inertial mass and acceleration information is available, we can easily estimate the joint disturbances. However, it is difficult and costly to mount a torque sensor on each joint and accelerometer. In addition, when the information obtained through the optical encoder is estimated by the finite difference method, the estimated angular velocity and acceleration may be noisy. In this paper, a costly effective data-driven approach for the identification of a link parameter of a robot is presented. Based on the input and output data, a joint model is estimated by the recursive least square (RLS) algorithm. Using the identified models, a state observer in the discrete domain is designed to estimate the joint acceleration signal of a robot manipulator. A combined structure of RLS and state observer is implemented in digital control hardware to estimate the inertial mass as well as the angular acceleration of each joint in a real-time fashion without adding any cost. The performance of estimating the angular acceleration and inertial mass of each joint of a robot manipulator are empirically compared with the finite difference method under the same hardware condition.
Similar content being viewed by others

References
J. S. Luh, M. W. Walker, and R. P. Paul, “Resolved-acceleration control of mechanical manipulators,” IEEE Trans. on Control Systems Technology, vol. 25, no. 3, pp. 468–474, 1980.
P. K. Khosla and T. Kanade, “Real-time implementation and evaluation of computed-torque scheme,” IEEE Trans. on Robotics and Automations, vol. 5, no. 2, pp. 245–253, 1989.
C. H. An, C. G. Atkeson, J. D. Griffiths, and J. M. Holler-bach, “Experimental evaluation of feedforward and computed torque control,” IEEE Trans. on Robotics and Automations, vol. 5, no. 3, pp. 368–373, 1989.
M. W. Spong, S. Hutchinson, and M. Vidyasagar, Robot Modeling and Control, Wiley, New York, 2006.
M. Tomizuka, “Robust digital motion controllers for mechanical systems,” Robotics and Autonomous System, pp. 143–149, 1996.
K. Kong and M. Tomizuka, “Nominal model manipulation for enhancement of stability robustness for disturbance observer-based systems,” International Journal of Control, Automation and Systems, vol. 11, no. 1, pp. 12–20, 2013.
J. S. Kim and J. H. Back, “Practical stabilization of an uncertain linear systems using state feedback based disturbance observer,” Journal of Institute of Control, Robotics, and Systems, vol. 23, no. 11, pp. 942–947, 2017.
S. D. Lee and S. Jung, “Experimental studies of Q filter design for disturbance observer for balancing control of a one-wheel robot,” Journal of Institute of Control, Robotics, and Systems, vol. 23, no. 11, pp. 948–954, 2017.
Y. J. Ko, Y. J. Kim, and J. S. Kim, “Robust speed control of an autonomous vehicle using disturbance observer,” Journal of Institute of Control, Robotics, and Systems, vol. 22, no. 5, pp. 339–345, 2016.
S. Katsura, K. Irie, and K. Ohishi, “Wideband force control by position-acceleration integrated disturbance observer,” IEEE Transactions on Industrial Electronics, vol. 55, no. 4, pp. 1699–1706, 2008.
T. C. S. Hsia, T. A. Lasky, and Z. Guo, “Robust independent joint controller design for industrial robot manipulators,” IEEE Transactions on Industrial Electronics, vol. 38, no. 1, pp. 21–25, 1991.
P. H. Chang and S. H. Park, “On improving time-delay control under certain hard nonlinearities,” Mechatronics, vol. 13, pp. 393–412, May 2003.
S. U. Lee and P. H. Chang, “The development of anti-windup scheme for time delay control with switching action using integral sliding surface,” Trans. ASME J. Dyn. Syst. Meas. Control, vol. 125, no. 4, pp. 630–638, Dec. 2003.
S. Jung, T. C. Hsia, and R. G. Bonitz, “Force tracking impedance control of robot manipulators under unknown environment,” IEEE Trans. on Control Systems Technology, vol. 12, no. 3, pp. 474–483, 2004.
S. Jung, “A neural network technique of compensating for an inertia model error in a time-delayed controller for robot manipulators,” International Journal of Control, Automation and Systems, vol. 18, no. 7, pp. 1863–1871, 2020.
C. G. Atkeson, C. H. An, and J. M. Hollerbach, “Estimation of inertial parameters of manipulator loads and links,” International Journal of Robotics Research, vol. 5, pp. 101–119, 1986.
H. Djadi, K. Yazid, and M. Menaa, “Parameters identification of a brushless doubly induction machine using pseudorandom binary signal excitation signal for recursive least squares method,” IET Electric Poser Applications, vol. 11, no. 9, pp. 1585–1595, 2017.
M. Gautier and P. Poignet, “Extended Kalman filtering and weighted least squares dynamic identification of robot,” Control Engineering Practice, vol. 9, no. 12, pp. 1361–1372, 2001.
Y. Yokokura, K. Ohishi, and S. Katsura, “Fine force reproduction based on motion-copying system using acceleration observer,” IEEE Transactions on Industrial Electronics, vol. 61, no. 11, pp. 6213–6221, 2014.
S. D. Lee and S. Jung, “Design of a real-time state observer for joint acceleration of a robot manipulator (KOBOKER),” Proc. of ICCAS, pp.692–694, 2018.
S. D. Lee and S. Jung, “Identification of linearized joint model and acceleration of a robot manipulator by RLS algorithm and state observer,” Proc. of ICCAS, pp. 1601–1604, 2019.
S. D. Lee and S. Jung, “Practical implementation of an improved all pass filtering technique for non-minimum phase models,” International Journal of Control, Automation and Systems, vol. 16, no. 3, pp. 1474–1481, 2018.
S. D. Lee and S. Jung, “A Monte Carlo dual-RLS scheme for improving torque sensing without a sensor of a disturbance observer for a CMG,” International Journal of Control, Automation and Systems, vol. 18, no. 6, pp. 1530–1538, 2020.
Z. Li, H. Yan, J. Sun, and H. Lam, “Stability and stabilization with additive freedom for delayed Takagi-Sugeno fuzzy systems by intermediary polynomial-based functions,” IEEE Trans. on Fuzzy Systems, vol. 28, no. 4, pp. 692–7051, 2020.
Z. Li, H. Yan, H. Zhang, H. K. Lam, and M. Wang, “Aperiodic sampled-data-based control for interval type-2 fuzzy systems via refined adaptive event-triggered communication scheme,” IEEE Trans. on Fuzzy Systems, vol. 29, no. 2, pp. 310–321, 2021.
Z. Li, H. Yan, H. Zhang, Y. Peng, J. H. Park, and Y. He, “Stability analysis of linear systems with time-varying delay via intermediate polynomial-based functions,” Automatica, 113, pp. 1–6, 2019.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work has been supported by the National Research Foundation of Korea (NRF) under the contract of 2016R1A2B201203, 2017K1A3A1A68072072, and 2019R1I1A3A01062567.
Sang-Deok Lee received his B.S. and M.S. degrees in electronics engineering from Cheonbuk National University, in 1998 and 2000, respectively. He joined LG Precision and Samsung Heavy Industry from 1998 to 2000 and from 2003 to 2014, respectively. He received a Ph.D. degree at Department of Mechatronics Engineering at Chungnam National University in 2018. His research interests are Mechatronic system identification and control. He is currently a researcher at Urban Agriculture Division, National Institute of Horticultural and Herbal Science, Rural Development Administration, Korea
Seul Jung received his B.S. degree in electrical and computer engineering from Wayne State University, Detroit, MI, USA in 1988, and his M.S. and Ph.D. degrees in electrical and computer engineering from the University of California, Davis, in 1991 and 1996, respectively. In 1997, he joined the Department of Mechatronics Engineering, Chungnam National University, where he is presently a professor. His research interests include intelligent Mechatronics systems, intelligent robotic systems, autonomous navigation, gyroscope applications, and robot education.
Rights and permissions
About this article

Cite this article
Lee, SD., Jung, S. Real-time RLS-based Joint Model Identification and State Observer Design for Robot Manipulators: Experimental Studies. Int. J. Control Autom. Syst. 19, 4025–4033 (2021). https://doi.org/10.1007/s12555-020-0919-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-020-0919-2