
Abstract
A pseudo-3D electrical resistivity tomography (ERT) survey has been carried out to detect cavities at the Neolithic/Palaeolithic site of Grotta Scaloria, close to Manfredonia, Apulia, Italy. Scaloria Cave has a rich history of archaeological research of more than 80 years and is one of the most important Neolithic complexes in the Mediterranean. Synthetic data modelling allowed to check the adequacy of the geophysical method and to develop a proper experimental setup at the survey design stage. Indeed, the results of the field data inversion revealed high resistivity anomalies which can be related to cavities and provided a good definition of the main geological structures and boundaries. Moreover, the results suggest that unknown and speleological unexplored cavities are still present at the Scaloria Cave study site. These findings may provide further insights on pseudo-3D ERT applicability, particularly for cavity detection. Furthermore, the approach used in this study yields fruitful information for further archaeological survey design and for the interpretation of ERT investigations targeting similar geological features and structures.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Scaloria Cave
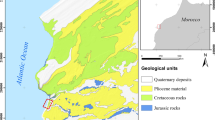
Scaloria Cave is located at about 1 km northeast of Manfredonia on the boundary between the Tavoliere Plain and the Gargano uplands at 43 m a.s.l. (Fig. 1). The wide presence of fractured limestone and the optimal climatic conditions in the past favored the development of karst processes in the entire area. Scaloria is an extensive cave, part of a larger karst system, with irregular chambers and twisting galleries. Its true extent is still unknown since many galleries are blocked by washed-in sediments and rockfalls. Scaloria Cave comprises two main chambers. “Scaloria Alta” is the large upper chamber. It extends over an area of 80 m by 40 m and has a ceiling height of about 2 m (Fig. 2). Numerous sinkholes have been identified, some of which yield evidence of human presence (Elster et al. 2016). These sinkholes are characterized by collapsed roof tops and consist of large blocks predating the Neolithic deposits. These blocks are arranged like a fan, with the apex directed to the ancient entrance. 230Th/234U dates on speleothems suggest that the complete ceiling of the cave collapsed around 1.17/1.04 Kyr ago due to a strong earthquake event (Rellini et al. 2016). “Scaloria Bassa” is the lower chamber of Scaloria Cave. This wide chamber is reached through a conduct passage and terminates in a natural water pool, of approximately 3-m depth. The Upper Chamber is connected with other cavities used in prehistory, the so-called Grotta di Occhipinto that opens about 200 m south east of the current entrance of Scaloria Cave.

Geographical setting (a) and field survey map (b) with planimetry of Scaloria and Occhiopinto cave complex: C1—Scaloria cave “Lower Chamber”; C2—Scaloria cave “Upper Chamber”; C3—Occhiopinto Cave. The maps in panels (a) and (b) are based on http://www.pcn.minambiente.it/mattm/ using the WMS service in GIS environmental; (c) stratigraphic core drillings [m]

(Modified from Rellini et al. 2019)
a Plan of Scaloria Cave with orange rectangles showing the location of the main archaeological excavation. b Cross-section of Scaloria cave with synthetic stratigraphic information, the fill consists in large blocks; further downwards, the deposits contain remains from the Early Neolithic.
The Scaloria Cave has a rich history of archaeological research spanning over more than 80 years. The publication of the volume “The Archeology of Grotta Scaloria,” which integrates up-to-date research with data from earlier studies, marks an important milestone in the history of the research at Scaloria Cave but also in the history of Italian prehistory itself (Elster et al. 2016). Scaloria Cave is one of the most important Neolithic complexes in the Mediterranean. It is a key site for prehistory well beyond that of Tavoliere. Scaloria Cave represent one of the most extraordinary examples of intensive utilization of the cave itself documented for the Neolithic period in Italy. It became famous thanks to spectacular evidences for the ritual collection of dripping waters from Stalactites discovered in the lower chamber (Tinè 1975; Tine and Isetti 1982; Whitehouse 1992; Skeates 2007). Vessels were located in different parts of the conduct between the upper and lower chambers and in the lower chamber itself, particularly in a flat area were a rectangular basin was dug, that is still collecting the dripping water from the roof (Fig. 3; Elster et al. 2016).

These rituals may express cultural activities or ceremonies related to water and/or water scarcity in the specific agrarian context of the area and the adjacent Tavoliere Plain. In fact, the beginning of the Scaloria Cave cult coincided with the abandonment of the Tavoliere settlements due to changing climatic conditions (Gravina 1988, Boenzi et al. 2001, 2004; Caldara and Pennetta 1992). However, recent studies (Rellini et al. 2020) confirmed the use of the cave as location of complete households and penning flocks, hence not only for special uses (ritual). The excavations of the late 70ies indicate an epipaleolithic presence of small groups of hunter and gatherer living in a typical. These finds, thus, attest a sporadic use of cave by small groups of hunter-gatherers living in a typical open post-glacial landscape (Elster et al. 2016).
In 2014, a bedrock core-drilling programme was carried out by IIAS “Istituto Italiano di Archeologia Sperimentale” (Isetti et al. 2016) to investigate the extent of karst cavities and the subsurface conditions near the cave. In total, three boreholes were drilled using a diamond core drill rig, giving a core diameter of 101 mm. The holes were drilled to varying depths ranging from 6 to 11 m below ground level. Figure 1 shows the location of the core drillings and a comparison of the stratigraphic settings of the boreholes. In summary, the two cores S1 and S3 showed an analogous stratigraphy, characterized by massive limestone, up to 6 m followed by an extremely fractured limestone, with numerous fissures and cracks, especially for S3. The stratigraphic sequence of core S2 consists of weathered limestone with numerous dissolution pores up to 7 m. Unfortunately, due to limited financial resources, the drilling was not exploring deeper sections. The cores simply demonstrated that a large part of the cave system is located quite deep under the present-day surface; hence, other methods are needed to investigate current subsurface geology.
ERT and cavity detection
In this archaeological context, near-surface geophysical methods represent an important tool to derive important information about underground properties and structures. One of the most frequently used geophysical techniques is electrical resistivity tomography (ERT). It is a quick and cost-effective method providing a reliable imaging of the subsurface electrical resistivity pattern and, hence, allows to identify subsurface structures. ERT theory (cf. Dahlin and Loke 1998; Loke et al. 2003) and application (cf. Griffiths and Barker 1993; Guerin and Benderitter 1995) are well documented in geophysical research literature.
ERT is based on a multi-electrode system consisting in the application of direct current into the ground by means of two current electrodes and the measure of the resulting voltage via two potential receiving electrodes. Each of the electrodes alternatively acts as a current and potential electrode. To obtain a true resistivity model of the subsurface, an inversion procedure is needed (Loke and Barker 1996). The arrangement of current and potential electrodes during the measurement is depending on the chosen electrode array. Most frequently used arrays are the dipole–dipole, Wenner, and Schlumberger arrays (e.g., Kneisel 2006; Schrott and Sass 2008). The dipole–dipole array uses two current electrodes on one side and two potential electrodes on the other side. This method is especially suitable for the detection of vertical structures as it shows high horizontal resolution. The main disadvantage of the method is a certain sensitivity to high near-surface resistivities (Szalai and Szarka 2008). The Wenner array comprises four equally spaced electrodes deployed in a row in which potential electrodes are located between current electrodes. The method is especially suitable for the detection of vertical changes (horizontal structures) as it shows high vertical resolution. Disadvantages comprise shallower penetration and less subsurface information in comparison with to the dipole–dipole array (Szalai et al. 2009). The Schlumberger configuration is similar to the Wenner array; potential electrode spacing is constant but current electrode spacing is logarithmically increased. The method is especially appropriate for the detection of horizontal structures since it shows a high vertical resolution like the Wenner array. As shown in the past, ERT is a well-suited technique to identify and map cavities. As shown in previous studies (e.g., Al-Zoubi et al. 2007; Carrière et al. 2013; Maillol et al. 1999; Rainone et al. 2015; Satitpittakul et al. 2013; Smith 1986; Van Schoor 2002; Zhu et al. 2011), ERT is a well-suited technique to identify and map karst features such as cavities and sinkholes. Cavities can be predominantly air-filled making them highly resistive or partially resistive in terms of the electric conductivity signal. The cavities may also be completely water-filled. In the latter case, depending on the ionic concentration of the groundwater, karst features may have a bulk conductivity ranging from very conductive to relatively conductive, compared to the bedrock. Cavities may comprise also strongly weathered material, such as clays, that have a relative high conductivity in respect to the bedrock. The resistivity response depends on the size of the target in relation to its depth and on the contrast between the resistivity of the target and the surrounding rock. The amplitude of resistivity anomalies is an inverse function of the distance between the measurement points and the cavity. The rocks surrounding cavities are often disturbed, particularly in carbonate karst environments where fractures and the dissolution of the rocks itself occur. The latter features create a larger, anomalous bulk volume than the cavity itself. Consequently, it was found that the effective geophysical size of the cavity varies with the geologic environment. However, it is usually larger than the true size of the cavity due to the porous and cracked surrounding rocks (Chalikakis et al. 2011). Nevertheless, the latter leads to a better or easier detection of cavities because the air-filled cavities have a near infinite electrical resistivity compared to the surrounding moist limestone and this helps to reproduce recognizable anomalies. Furthermore, sedimentary covers and epikarst zones having specific characteristics can significantly change the geophysical response of the underlying cavity-related target. The depth of the investigation and the vertical and lateral detectability, especially of shallow-body-resistivities, are linked to (i) the electrode spacing, (ii) the configuration array, (iii) the quadrupole sequence, (iv) the S/N ratio, and (v) the contrast between the resistivity of the target and the surrounding rock and/or background resistivity.
However, cavity detection is still a challenge due to various reasons. Generally, cavity detection is controlled by its volume and depth and the electrical resistivity contrast in respect to the surrounding bedrock. Although ERT provides more information on the lithology of the bedrock because it engages the entire rock mass, 3D ERT or pseudo-3D ERT are more sensitive to rock discontinuities and, accordingly, their application can be suitable for the assessment of structural features. Based on the above discussed state of the art, our study focuses on the following research questions:
-
(i)
Can ERT accurately provide the position, the size, and the shape of an air-filled cavity in three-dimensions?
-
(ii)
Is ERT capable to detect double or multiple cavities?
-
(iii)
Is ERT able to discriminate a cavity from a high porosity zone consisting of only enlarged fractures?
Synthetic data modelling can be helpful in answering these questions. Synthetic data modelling (also termed as forward modelling) is a numerical simulation aimed at evaluating the capacity of the implemented model to detect and delineate predefined targets. Other previous studies employed synthetic modelling to aid in the interpretation of ERT anomalies and the detection of cavities. Torrese (2015; 2020; 2022) performed two-dimensional and three-dimensional synthetic data modelling to validate observed subsurface structural features and provide the detectability of ERT models in identifying karst features. Orlando (2013) used synthetic data modelling to show that a cavity embedded in a stratified sedimentary sequence can induce an equivalence problem in the ERT data inversion; this may manifest itself as wrong cavity depth positioning. Torrese et al. (2021) showed through their synthetic data modelling that cavity-related high-resistivity anomalies in heterogeneous settings may appear larger and shallower and may also be laterally shifted with respect to their true location; in addition, for cavities with a small size with respect to the electrode spacing, their results showed the difficulty in distinguishing single cavities from cavities that are connected, and distinguishing cavities in general from void-rich zones.
In addition, integration of different geophysical data (Negri et al. 2008) and ground truth validation (Torrese et al. 2022a, b) can help to reduce ERT uncertainties in the identification of cavities and subtle subsurface features. Cardarelli et al. (2010) integrated ERT and seismic refraction tomography data in a joint interpretation process for cavity location. They showed that data integration and the insertion of a priori information are key issues for reducing the uncertainties associated with the inversion process and for optimizing both acquisition procedures and computation time.
To reach the objectives of the study, we carried out ERT surveys and compared the results with core drillings conducted in the area. Moreover, we performed a synthetic integrative dataset modelling to simulate and study the presence of single cavities, doublet cavities, and void-rich volumes. This systematic investigation helped us to get valuable information for further archaeological surveys. With our experiments, we checked the adequacy of the chosen method and developed a proper experimental setup. Moreover, the results we present yield valuable information to interpret field ERT data aimed at the visualization of heterogeneous and complex geological targets such as karst cavities.
Materials and methods
General methodology
Both synthetic and field ERT data were used in this study. Realistic synthetic datasets have been generated and inverted to provide pseudo-3D inverse resistivity models. Synthetic datasets have been generated by forward modelling through the application of different synthetic models simulating a geological model of the Scaloria Cave study site and the presence of air-filled cavities and void-rich volumes with different characteristics. This allowed to define the detectability of cavities provided by our pseudo-3D ERT model and to design the field experiment. The accuracy of the model has been determined on the basis of a visual comparison between a pre-defined synthetic model (SYM) and the image resulting from the inversion of synthetically calculated data (contaminated with noise) generated from the same pre-defined SYM through forward modelling.
Finally, field datasets were collected with the same experimental setup and inverted using the same inversion procedure already run for the synthetic datasets. The opportunity to cross-validate geophysical results with ground truth data allowed us to evaluate the detectability and limitations of the pseudo-3D models as well as the effectiveness of some of the most common electrode arrays in karst aquifer investigations.
Synthetic data test
Based on the local settings of Scaloria Cave, we developed 3 different synthetic models. Soil thickness and soil and rock resistivity, as well as cavity characteristics, were defined on the basis of a priori information and hand auger drilling logs. The first synthethic model, SYM 1 (Fig. 4; a1), is reflecting a thin soil up to 1-m depth (hand auger drillings). Moreover, Scaloria Cave is characterized by a weathered limestone (stratigraphic logs in Fig. 5). SYM 1 is based on a single cavity showing a maximum vertical extension of circa 10 m. The second model, SYM 2 (Fig. 4; b1), shows two air-filled cavities with a 5-m distance between them. This setting is reflecting the situation at Scaloria cave where larger cavities are separated by material of roof collapse or small conducts as reported by Elster et al. (2016). Instead, SYM 3 (Fig. 4; c1) is characterized by several cavities. Synthetic datasets have been generated by forward modelling through the application of different 3D synthetic models (SYMs):
-
SYM 1 simulated the presence of a 100 Ω∙m, 1-m-thick soil, 10.000 Ω∙m weakly karstified limestone, and a 10-m-sized air-filled cavity with the air resistivity (2.3 1014 Ω∙m) (Fig. 4; a1).
-
SYM 2 simulated the same geological model of SYM 1 and the presence of two, distant air-filled cavities 5 m apart (Fig. 4; b1).
-
SYM 3 simulated the same geological model of SYMs 1 and 2 and the presence of different sized and differently located air-filled cavities and a 1 106 Ω∙m, 10-m-sized void-rich volume (Fig. 4; c1).

3D synthetic models simulating the occurrence of (a1) a single air-filled cavity, (b1) a doublet air-filled cavity, (c1) different sized and differently located air-filled cavities and a voids-rich volume in the geological model of Scaloria Cave and (a2, b2, c2) the respective resulting pseudo-3D inverse models

Extraction from the pseudo-3D inverse model from field data, stratigraphic core drillings (S1; S2, S3), and corresponding vertical cross-sections from the pseudo-3D model; the (3D) extracted volume (13.000–73.000 resistivity range) is the cavity-related high-resistivity anomaly; differently, vertical cross-sections are full resistivity range pseudo-3D inverse model and vertical cross-sections are visualized with the same color scale displayed in the legend. The stratigraphic units from core drillings were represented with the same color (blue and light blue) as the resistivity interval associated with them. In contrast, the soil (black) and the void (white) were represented with colors not included in the resistivity color scale as they are too thin intervals to be well visualized in the pseudo-3D inverse model
The experimental layout consists in 51 electrodes at 2-m intervals along 14, parallel, 100-m-long profiles. The 14 parallel profiles have a 2-m row spacing (Fig. 1). Each profile simulates the use of a hybrid array sequence compounded by 1358 quadrupoles (19.012 for the overall model). The data sequence is composed by merging a dipole–dipole array which delivers high horizontal resolution with Wenner and Schlumberger arrays which deliver high vertical resolution and signal amplitude. The combination and the integrated inversion of the data obtained with these arrays, differing in resolution, were employed to deliver a better detectability and visualization and, therefore, according to Szalai et al. (2009) provides more accurate inverse models. A 3D resistivity grid of 100 m × 26 m size, with a maximum pseudo-depth of 17 m has been achieved by merging and full-inverting 2-D data.
The software ERTLab Solver (by Multi-Phase Technologies LLC, Geostudi Astier srl) based on tetrahedral finite element modelling (FEM) was used for the forward modelling and data inversion. A tetrahedral discretization was applied for both forward and inverse modelling. The foreground region was discretized using a 2-m element size along the X, Y, and Z directions. The use of a smaller element size was not possible due to computational limits. The background region was discretized using an increasing element size towards the external part of the domain, according to the sequence 1 × , 1 × , 2 × , 4 × , and 8 × of the foreground element size.
The forward modelling was performed using mixed boundary conditions (Dirichlet–Neumann) and a tolerance (stop criterion) of 1.0 10−7 for a Symmetric Successive Over-Relaxation-Conjugate-Gradient (SSORCG) iterative solver. The synthetic datasets generated by forward modelling through the application of the SYMs were corrupted with 1% random noise to provide realistic results and finally the datasets were inverted. Data inversion was based on a least squares’ smoothness constrained approach (La Brecque 1996). The noise was appropriately managed using a data weighting algorithm (Morelli and La Brecque 1996) that allows to adaptively change the variance matrix after each iteration for those data points which are poorly fitted by the model.
The inverse modelling was performed using a maximum number of internal inverse preconditioned-conjugate-gradient (PCG) iterations of 5 and a tolerance (stop criterion) for inverse PCG iterations of 0.001. The amount of roughness from one iteration to the next was controlled in order to assess maximum layering. A low value of the reweight constant (0.1) was set with the objective to generate a maximum inhomogeneity. A 3% standard deviation estimate for noise was assumed to invert the dataset.
Field data test
ERT field data were collected between the 11th and 13th of September 2014 with a fully automatic multi-electrode resistivity meter (4PunktLight Lippmann Ltd.). Same experimental layout, electrode arrays, and sequences simulated in synthetic data modelling were used to collect field data. Data processing allowed us to remove outliers from apparent resistivity data. A pseudo-3D resistivity imaging was obtained from full inversion of merged 2-D ERT data. The same solver and inversion procedure already run in synthetic dataset modelling was applied in the field data inversion. The inverse resistivity models were obtained through the application of a homogeneous starting model with background apparent resistivity values resulting from the collected field dataset. The final inverse resistivity models were chosen based on the criterion of minimum data residuals.
Results
Synthetic test results (Fig. 4; a2, b2, c2) show that ERT is a well-suited technique to identify air-filled cavities at the archaeological site of Grotta Scaloria. Indeed, they appear as high-resistivity volumes because they have a near infinite electrical resistivity compared to the host limestone. However, although a single cavity (Fig. 4; a2) and distant doublet cavities (Fig. 4; b2) are well defined, very close cavities appear as continuous anomalies (bodies 1–4 in the high resistivity range and bodies 1–6 in the low resistivity range, in Fig. 4; c2). Small cavities and void-rich volumes are not able to produce anomalies if their size-to-depth ratio is unfavorably low (bodies 5–8 in the high resistivity range, in Fig. 4; c2). Under the most favorable conditions (higher size to depth ratio), they produce large anomalies in common with the nearby, detectable cavities (bodies 3–8 in the low resistivity range, in Fig. 4; c2). However, small cavities and void-rich volumes are not able to produce recognizable and distinguishable anomalies. Moreover, at a given depth, it is not always possible to define whether an anomaly is a small cavity or a larger void-rich volume (bodies 7, 8 for the low resistivity range, in Fig. 4; c2). Furthermore, cavity-related high-resistivity anomalies always show a severe underestimation of their actual resistivity values (Fig. 4).
The field test revealed that resistivity data separate in three resistivity units as follows (Fig. 5):
-
1)
The low resistivity unit ranging from 135 to 1.300 Ω m, associated with different types of unconsolidated deposits, such as soil, detrital coverage, and/or the strongly weathered upper part of the limestone rock.
-
2)
The medium resistivity unit ranging from 1.300 to 13.000 Ω m that is related to the weakly karstified and cracked limestones.
-
3)
The high resistivity unit ranging from 13.000 to 73.000 Ω m which is characterized by cavity-related high-resistivity anomalies, i.e., air-filled cavities, void-rich volumes, heavily decompacted limestone, heavily cracked or karstified limestone, or, in general, high porosity volumes.
Regarding the cavity-related high-resistivity anomaly, the main body is located at a depth of about 9 m from the ground level. Secondary bodies are located at depths between 4 and 9 m (see Fig. 5). This high resistivity anomaly may correspond to (i) the presence of volumes affected by high porosities (e.g., void-rich volumes), or (ii) multiple cavities with various size not communicating or partly communicating, or (iii) the presence of a one large cavity. The pseudo-3D inverse model agrees with the stratigraphic core drillings (S1, S2, S3, Fig. 5) in terms of the thickness of the weakly karstified limestone (b in S1, S2, and S3, Fig. 5) and regarding the transition from weakly karstified limestone to cracked limestone (from b to c in S2 and S3, Fig. 5). The soil is not detectable by the pseudo-3D model as, being made up of air-filled, coarse, unconsolidated deposits. Moreover, it has a poor contrast of resistivity with respect to the underlying weakly karstified limestone. The presence of the cavity in the core drilling S3 (Fig. 5) is associated with the maximum resistivity values of the pseudo-3D model. Indeed, core drilling S3, which is located at the edge of the already explored cave of Scaloria, indicated a cavity at a depth between 8 and 9 m. This intercepted cavity is part of the cavity-related high-resistivity anomaly revealed by the pseudo-3D model (Fig. 5). Unfortunately, the remaining S1 and S2 core drillings have not reached the depth of the cavity-related high-resistivity anomaly. However, they show stratigraphic characteristics that are in line with the resistivity pattern revealed by the pseudo-3D model. Based on the pseudo-3D resistivity survey, the location of a potential cavity was identified and reported in relation to the already explored Scaloria Cave (Fig. 6).

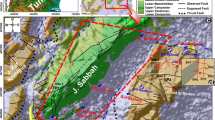
Unexplored predicted cavity as revealed by the pseudo-3D resistivity survey (in blue) and the location of the already explored cavities (in brown), cave entrances (red star), main archaeological excavation (red rectangle) and cross-section (red line) in the Scaloria “Upper Chamber”
Discussion
The synthetic test results validated by the cross-validation of the field data test results with ground truth show that the ERT pseudo-3D model can identify and map air-filled cavities in the study area of Grotta Scaloria. Although the interpretation of resistivity anomalies is not always straightforward (Van Schoor 2002) and cavity detection is often challenging, our ERT analysis revealed the presence of cavity-related high-resistivity anomalies. The opportunity to cross-validate the geophysical results with ground truth provided by core drillings S1 and partly S2 and S3 allowed us to calibrate resistivity values and patterns to recognize different geologic bodies, such as cavities as well as weakly karstified/cracked limestones. Furthermore, the combination and the joint inversion of data obtained with Wenner, Schlumberger, and dipole–dipole arrays show reliable inverse model results.
The resistivity pattern revealed by the pseudo-3D inverse model agrees with the stratigraphic core drillings regarding the detection of weakly karstified limestone, cracked limestone, and cavity occurrence. Conversely, the pseudo-3D inverse model was unable to detect the presence of soil as revealed by core drillings due to the poor contrast of resistivity with respect to the underlying weakly karstified limestone. This was however not significant for the purposes of the study. If the soil had been made up of finer incoherent materials, such as silt and clay, its presence and thickness might have been detected by the model.
It is worth highlighting that, as suggested by the synthetic data assessment, the cavity-related high-resistivity anomaly revealed by the field data test may correspond to (i) different geological bodies such as volumes affected by high porosity values (e.g., void-rich volumes), or (ii) cavities with various size not communicating or partly communicating (Torrese et al. 2021), or (iii) the presence of a unique large cavity. Indeed, one of the most significant disadvantages of the application of geoelectrical techniques is that the same range of resistivity can be related to different materials and that each material can be characterized by a relatively wide range of possible resistivities depending on measurement-related factors and internal (e.g., the size/depth ratio of the target, actual physical and chemical states of the target) as well as external conditions such as the physical and chemical composition of the targets’ surrounding (Schrott and Sass 2008).
Furthermore, the detected cavity-related high-resistivity anomalies may appear as larger than the real cavity. This discrepancy was also revealed by the synthetic dataset modelling illustrating a large anomaly due to the interference of smaller cavities and void-rich volumes (Fig. 4). This phenomenon has been also observed by Ezersky (2008) and Pánek et al. (2010) in their studies on cave chambers, passages, and sinkholes and by Torrese et al. (2021) in their studies on lava tubes in volcanic settings Another explanation of this phenomena is related to the occurrence of zones surrounding the cavity that are highly alterated or affected by rock decompaction (i.e., void-rich zones) in the vicinity of or above real cavities.
Although this study focused on the detection of air-filled cavities only, it is worth highlighting that ERT can be also used to investigate cavities and caves that are (at least partly) filled with water and sediment. If air-filled cavities are related to high resistivity anomalies, partially or completely water-filled cavities may have a significant lower resistivities compared to the host rock depending on the ionic concentration of the groundwater. Cavities may also be filled by highly weathered material, such as silt and clays, in which case they will typically show a very lower resistivity relative to the host rock (Torrese et al. 2022a, b).
As shown in our analysis, karst-landscapes show very complex characteristics difficult to assess with geophysical explorations due to strong surface heterogeneities generated by fractures and depressions in the carbonate rocks filled with air, weathered detritus, or soil material. However, we illustrated that the composition and geophysical behaviour of different geological bodies such as volumes affected by high porosity, or multiple, smaller, communicating cavities, or larger, isolated, individual cavities can be assessed combining different arrays of measured and synthetic data (Szalai et al. 2009; Torrese 2020) and validating the models with stratigraphic core drillings (Fig. 5).
This study also identified some important pitfalls that may limit the use and accuracy of ERT in detecting the geometry of cavities. This is due to the spectrum of possible interpretations of cavity-related anomalies. To overcome the limitations of the ERT method in resolving the geometry of air-filled cavities, other geophysical methods and further ground-truthing coupled with ERT can be considered in future surveys at Scaloria Cave site. Recently, Torrese et al. (2022a, b) found microseismic data useful and suitable for cavity detection, in agreement with results by Kolesnikov and Fedin (2018). Furthermore, active seismic methods such as high-resolution reflection, refraction, and tomography as well as ground-penetrating radar (GPR) are also suitable methods for this kind of task.
Anyway, our results confirm the hypothesis of a large northern extension of the karst system and provide useful information to design a future excavation plan. This approach, if extended to the whole area of the study site, can be used to produce a 3D map of the potential karst system or to produce other images that defined “anomalies” which may have a cultural significance (Fig. 6). Similarly to Scaloria cave, other cave entrances may have been collapsed in the past and hence unknown or invisible using traditional excavation methods. For instance, explorations by cavers showed that Scaloria and Occhiopinto caves are interconnected. In other words, they form different branches of a single, very extensive cave complex (see Fig. 1). The upper chamber of Scaloria Cave is connected with Occhiopinto Cave through a narrow passage. This passage may have been easily passable before roof collapses happened. Occhiopinto’s cave entrance is geomorphologically a wide sinkhole or dolina. Today, the shelter, partially blocked by blocks resulting from the roof collaps, is characterized by totally disturbed deposit, with a few Daunian and Classic pottery fragments, even if the cave was undoubtedly used in prehistory, probably for ritual purposes (Elster et al. 2016).
Moreover, Scaloria Cave is located in a densely occupied landscape. The neolithic Tavoliere is one of the best-understood Neolithic landscapes in Europe, thanks to Bradford’s pioneering discoveries through aerial photography of some 500 to 1000 ditched villages (Bradford 1949, Tinè 1983), followed by several decades of excavations at these sites. Surface collections in the fields around Scaloria Cave and excavations conducted outside the cave’s original entrance yield abundant Neolithic debris, commonly used for houses on villages’ sites (Elster et al. 2016), but aerial photographs of the cave reveal no ditched village. At present, there is no agreement as to whether a village existed around the cave or not. The information obtained by the geophysical studies may help resolve this issue revealing more information about buried archaeological features.
Finally, the detection of new cavities which might keep rare evidence of Palaeolithic is an important objective regarding the exiguous number of sites of that culture available in Central and Southern Italy.
Conclusions
The Scaloria Cave study site is one of the most important Neolithic complexes in the Mediterranean. It is a key site for prehistory with extraordinary examples documenting an intensive use of the cave. The wide presence of fractured limestone and the optimal climatic conditions in the past favored the development of karst processes in the entire area. Thus, the study site is characterized by an extensive cave that is part of a larger karst system, with irregular chambers and twisting galleries of unknown extent. In order to get more information and insights to the complex underground structures of the Scaloria Cave system, we applied a pseudo-3D ERT survey. The results revealed the presence of cavity-related high-resistivity anomalies and provided a good definition of the main geological limits and boundaries. The opportunity to cross-validate the geophysical results with ground truth provided by core drillings allowed us to calibrate resistivity values with observed stratigraphic/lithologic pattern. These evidences suggest that unknown and speleologically unexplored cavities are present at Scaloria site. Synthetic data modelling allowed to check the adequacy of the geophysical method and to develop a proper experimental setup for further surveys. It also helped defining and interpreting difficult geological structures such as karst cavities. Our findings provide further insights concerning pseudo-3D ERT applicability and its effectiveness in cavity detection. Moreover, we show how synthetic data modelling yield valuable information for survey design and interpretation stages of ERT investigations aimed at imaging similar geological structures and features. This study also identified some important pitfalls that may limit the use and accuracy of ERT in detecting the geometry of cavities. This is due to the spectrum of possible interpretations of cavity-related anomalies. To overcome the limitations of the ERT method in resolving the geometry of air-filled cavities, other geophysical methods and further ground-truthing coupled with ERT can be considered in future surveys at Scaloria Cave site. The presented approach, if applied to the whole study area, can be used to produce a 3D map of the potential karst cavities and may help archaeologists in the planning of new excavation campaigns. Additionally, a detailed geophysical assessment helps also to determine suitable conditions for the conservation and safeguarding of potential archaeological sites (e.g., limiting construction activity; local/regional planning in the investigated areas). Our results confirm once more that the ERT techniques are very powerful and helpful tools in archaeological investigations of the underground and, hence, contribute to preserve the cultural heritage.
References
Al-Zoubi AS, Abueladas AERA, Al-Rzouq RI, Camerlynck C, Akkawi E, Ezarsky M, Al Rawashdeh S (2007) Use of 2D multi electrodes resistivity imagining for sinkholes hazard assessment along the eastern part of the Dead Sea Jordan. Am J Environ Sci 3(4):229–233. https://doi.org/10.3844/ajessp.2007.230.234
Boenzi F, Caldara M, Pennetta L (2001) History of the Salpi lagoon-sabkha (Manfredonia Gulf, Italy). Il Quaternario 14(2):124–133
Caldara M, Pennetta L (1992) Interpretazione paleoclimati a di dati preistorici e storici relativi all’entroterra del Golfo di Manfredonia. Mem Soc Geol Ital 42(1989):197–207
Cardarelli E, Cercato M, Cerreto A, Di Filippo G (2010) Electrical resistivity and seismic refraction tomography to detect buried cavities. Geophys Prospect 58(4):685–695
Carrière SD, Chalikakis K, Sénéchal G, Danquigny C, Emblanch C (2013) Combining electrical resistivity tomography and ground penetrating radar to study geological structuring of karst unsaturated zone. J Appl Geophys 94:31–41. https://doi.org/10.1016/j.jappgeo.2013.03.014
Chalikakis K, Plagnes V, Guerin R, Valois R, Bosch FP (2011) Contribution of geophysical methods to karst-system exploration: an overview. Hydrogeol J 19(6):1169–1180. https://doi.org/10.1007/s10040-011-0746-x
Dahlin T, Loke MH (1998) Resolution of 2D Wenner resistivity imaging as assessed by numerical modelling. J Appl Geophys 38(4):237–249. https://doi.org/10.1016/S0926-9851(97)00030-X
Elster ES, Isetti E, Robb J, Traverso A (eds) (2016) The Archeology of Grotta Scaloria. Cotsen Institute of Archaeology Pres, Los Angeles
Ezersky M (2008) Geoelectric structure of the Ein Gedi sinkhole occurrence site at the Dead Sea shore in Israel. J Appl Geophys 64(3–4):56–69. https://doi.org/10.1016/j.jappgeo.2007.12.003
Gravina A (1988) Caratteri del Neolitico medio-finale nella Daunia centro-settentrionale. Atti del VI Convegno sulla Preistoria - Protostoria e Storia della Daunia, vol. I, S. Severo, pp. 21–50, 14/12/1984
Griffiths DH, Barker RD (1993) Two-dimensional resistivity imaging and modelling in areas of complex geology. J Appl Geophys 29(3–4):211–226. https://doi.org/10.1016/0926-9851(93)90005-J
Guerin R, Benderitter Y (1995) Shallow karst exploration using MT-VLF and DC resistivity methods. Geophys Prospect 43(5):635–653. https://doi.org/10.1111/j.1365-2478.1995.tb00272.x
Isetti E, Traverso A, Nicolini S, Pian D, Rellini I, Robb J, Rossi G (2016) Grotta Scaloria. Indagini 2015 2015. Atti del 36° Convegno sulla Preistoria - Protostoria e Storia della Daunia, vol. I, S. Severo, pp 23- 31
Kneisel C (2006) Assessment of subsurface lithology in mountain environments using 2D resistivity imaging. Geomorphology 80(1–2):32–44. https://doi.org/10.1016/j.geomorph.2005.09.012
Kolesnikov Y, Fedin K (2018) Detecting underground cavities using microtremor data: physical modelling and field experiment. Geophys Prospect 66:342–353. https://doi.org/10.1111/1365-2478.12540
La Brecque DJ (1996) The effects of noise on Occam’s inversion of resistivity tomography data. Geophysics 61(2):538. https://doi.org/10.1190/1.1443980
Loke MH, Acworth I, Dahlin T (2003) A comparison of smooth and blocky inversion methods in 2D electrical imaging surveys. Explor Geophys 34(3):182–187. https://doi.org/10.1071/EG03182
Loke MH, Barker RD (1996) Rapid least-squares inversion of apparent resistivity pseudosections by a quasi-Newton method. Geophys Prospect 44(1):131–152. https://doi.org/10.1111/j.1365-2478.1996.tb00142.x
Maillol JM, Seguin MK, Gupta OP, Akhauri HM, Sen N (1999) Electrical resistivity tomography survey for delineating uncharted mine galleries in West Bengal India. Geophys Prospect 47(2):103–116. https://doi.org/10.1046/j.1365-2478.1999.00126.x
Morelli G, LaBrecque DJ (1996) Advences in ERT inverse modeling. Eur J Environ Eng Geophys 1:171–186
Negri S, Leucci G, Mazzone F (2008) High resolution 3D ERT to help GPR data interpretation for researching archaeological items in a geologically complex subsurface. J Appl Geophys 65(3–4):111–120. https://doi.org/10.1016/j.jappgeo.2008.06.004
Orlando L (2013) GPR to constrain ERT data inversion in cavity searching: theoretical and practical applications in archeology. J Appl Geophys 89:35–47. https://doi.org/10.1016/j.jappgeo.2012.11.006
Pánek T, Margielewski W, Tábořík P, Urban J, Hradeckỳ J, Szura C (2010) Gravitationally induced caves and other discontinuities detected by 2D electrical resistivity tomography: case studies from the Polish Flysch Carpathians. Geomorphology 123(1–2):165–180. https://doi.org/10.1016/j.geomorph.2010.07.008
Rainone ML, Rusi S, Torrese P (2015) Mud volcanoes in central Italy: subsoil characterization through a multidisciplinary approach. Geomorphology 234:228–242. https://doi.org/10.1016/j.geomorph.2015.01.026
Rellini I, Ciampalini A, Firpo M, Hellstrom J (2016) Geoarcheological studies. In: Elster ES, Isetti E, Robb J, Traverso A (eds) The Archeology of Grotta Scaloria. Cotsen Institute of Archaeology Pres, Los Angeles, pp 57–61
Rellini I, Firpo M, Isetti E, Rossi G, Robb J, Pian D, Traverso A (2020) Micromorphological investigations at Scaloria Cave (Puglia, South-east Italy): new evidences of multifunctional use of the space during the Neolithic. Archaeol Anthropol Sci. https://doi.org/10.1007/s12520-019-01005-0
Satitpittakul A, Vachiratienchai C, Siripunvaraporn W (2013) Factors influencing cavity detection in Karst terrain on two-dimensional (2-D) direct current (DC) resistivity survey: a case study from the western part of Thailand. Eng Geol 152(1):162–171. https://doi.org/10.1016/j.enggeo.2012.10.015
Schrott L, Sass O (2008) Application of field geophysics in geomorphology: advances and limitations exemplified by case studies. Geomorphology 93(1–2):55–73. https://doi.org/10.1016/j.geomorph.2006.12.024
Skeates R (2007) Religious experience in the prehistoric Maltese underworld. In: Barrowcough DA, Malone C (eds) Cult in context. Reconsidering Ritual in Archaeology, Oxford p, pp 91–95
Smith DL (1986) Application of the pole-dipole resistivity technique to the detection of solution cavities beneath highways. Geophysics 51(3):833–837. https://doi.org/10.1190/1.1442135
Szalai S, Novak A, Szarka L (2009) Depth of investigation and vertical resolution of surface geoelectric arrays. J Environ Eng Geophys 14(1):15–23. https://doi.org/10.2113/JEEG14.1.15
Szalai S, Szarka L (2008) Parameter sensitivity maps of surface geoelectric arrays I. Linear arrays. Acta Geod Geophys Hungarica 43(4):419–437. https://doi.org/10.1556/AGeod.43.2008.4.4
Tinè S (1975) Un Culto Neolitico delle Acque nella Grotta Sca-loria. In: Valcamonica Symposium ’72: Les Religions de la Préhistoire, edited by E. Anati,185–190. Centro Comuno di Studi Preistorici, Capo di Ponte, Italy
Tine S, Isetti E (1982) Culto neolitico delle acque e recenti scavi nella Grotta Scaloria. Bullettino Di Paletnologia Italiana 82:31–70
Torrese P (2015) The use of synthetic dataset modelling to assess the detectability of ERT surveys with different arrays when identifying karst intervals in the HES of Poitiers (France). 28th Symposium on the Application of Geophysics to Engineering and Environmental Problems 2015. SAGEEP 2015:631–637
Torrese P (2020) Investigating karst aquifers: Using pseudo 3-D electrical resistivity tomography to identify major karst features. J Hydrol 580. https://doi.org/10.1016/j.jhydrol.2019.124257
Torrese P (2022) Subsurface structure of the proposed Sirente meteorite crater: insights from ERT synthetic modelling. Acta Geod Geophys. https://doi.org/10.1007/s40328-022-00391-7
Torrese P, Pozzobon R, Rossi AP, Unnithan V, Sauro F, Borrmann D, Lauterbach H, Santagata T (2021) Detection, imaging and analysis of lava tubes for planetary analogue studies using electric methods (ERT). Icarus 114244, https://doi.org/10.1016/j.icarus.2020.114244
Torrese P, Unnithan V, Rossi AP (2022a) Planetary analogue study using microseismic analysis for near-surface lava tube detection and exploration. Icarus 377:114912. https://doi.org/10.1016/j.icarus.2022.114912
Torrese P, Zucca F, Martini S, Benazzi S, Drohobytsky D, Gravel-Miguel C, Hodgkins J, Meyer D, Miller C, Peresani M, Orr C, Riel-Salvatore J, Strait DS, Negrino F (2022b) Ground truth validated 3D electrical resistivity imaging of the archaeological deposits at Arma Veirana cave (northern Italy). J Quaternary Sci. https://doi.org/10.1002/jqs.3406
Van Schoor M (2002) Detection of sinkholes using 2D electrical resistivity imaging. J Appl Geophys 50(4):393–399. https://doi.org/10.1016/S0926-9851(02)00166-0
Whitehouse RD (1992) Underground religion. Cult and Culture in Prehistoric Italy. Accordia Research Centre, London
Zhu J, Currens JC, Dinger JS (2011) Challenges of using electrical resistivity method to locate karst conduits-A field case in the Inner Bluegrass Region Kentucky. J Appl Geophys 75(3):523–530. https://doi.org/10.1016/j.jappgeo.2011.08.009
Funding
Open access funding provided by Università degli Studi di Pavia within the CRUI-CARE Agreement. This study was supported by Heidelberg Academy of Sciences and Humanities (ROCEEH Project) providing travel grants for Michael Maerker. The University of Genova supported fieldwork of Ivano Rellini and Luigi Mucerino. The archeologic excavations at Scaloria Cave are conducted with specific permission (ex artt. 88-89 D.L.gs 42/04 circ. n.47 del 16-11-2022) at the Italian Institute for Experimental Archeology, Genoa, Italy, under supervision of Dr. Eugenia Isetti.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Maerker, M., Rellini, I., Mucerino, L. et al. Cavity detection using a pseudo-3D electric resistivity tomography at the Palaeolithic/Neolithic site of Scaloria Cave, Apulia, Italy: integrated assessment of synthetic and field data sets. Archaeol Anthropol Sci 15, 175 (2023). https://doi.org/10.1007/s12520-023-01859-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12520-023-01859-5