
Abstract
Synthetic aperture radar (SAR) imaging systems use pulse focusing techniques for achieving fine range resolution and large range detection. Stretch processing and correlation pulse focusing techniques are the most popular algorithms used in the radar signal processing stage. The architecture of the stretch processing technique makes it commonly used in frequency modulated continuous wave (FMCW) radar systems due to its simple architecture, low sampling rate, and inexpensive hardware. This paper discusses how the stretch range focusing approach can be used instead of the matched filter technique in the processing stage of the SAR Range-Doppler algorithm (RDA) to generate images of finer resolution and higher quality. In addition, validating the proposed algorithm and evaluating its performance according to some evaluation indices such as peak sidelobe ratio (PSLR), integrated sidelobe ratio (ISLR), and the impulse response width (IRW). Also, this paper presents a comprehensive analysis and hardware implementation of the two SAR algorithms, based on software-defined radio (SDR) architecture where it is characterized by less complexity, low cost, and high flexibility due to the usage of both software data processing and software waveform generation. Two Universal Software Radio Peripheral (USRP-2932) and NI-LabVIEW® software development environment are the platforms used for the hardware validation process. The transmitted waveform is a linear frequency modulated (LFM) signal generated by the first USRP (transmitter) which will hit a target located at a certain distance. The second USRP is used as a receiver for target’s echo processing and detection. This processing stage contains two architectures, which are the matched filter pulse compression architecture and the stretch range focusing approach. Finally, the validation process of the hardware results is performed based on the pre-mentioned evaluation indices.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Synthetic aperture radar is the primary operation mode for ground mapping and remote sensing applications. Compared to other real-beam systems, fine angles and accurate localization of the inspected targets could be resolved significantly by using SAR systems (Richards 2009). Conceptually, SAR uses the principle of accurate processing for the received returns to form very high-resolution images using coherent transmission of large bandwidth illuminated signals (Guaragnella and D’Orazio 2019). SAR exploits the coherent transmission during its forward motion to produce very long array antenna. The synthetic antenna is accomplished by effectively accumulating the physical antenna received echoes along the entire flight path. As a result, it guarantees fine azimuth resolution (Maître 2013). SAR structure is composed of the platform (i.e., space borne or airborne), time-shared antenna, and radio waves that are used for continuously illuminating the target scene (Klauder et al. 1960).
The target echoes are received along the platform flight path at different positions. These RF echoes are converted to IF signals for signal processing (Curlander and McDonough 1991). Generally, SAR image resolution is independent of the target range. For instance, the processed image at 100 m above the ground will have the same resolution as the captured image at several hundred kilometers (Berens 2006). RDA is an efficient, simple, and widely used algorithm designed for focusing on SAR raw data (Cumming and Wong 2005). RD algorithm uses the large difference in time scale of range and azimuth data and approximately separates processing in these two directions using the Range Cell Migration Correction (RCMC). Range cell migration correction (RCMC) performs this separation process efficiently (Clemente and Soraghan 2012). Theoretically, the compression concept of RDA depends on the principle of the matched filter, where the SNR index is sufficient to achieve the minimum imaging requirements (Fang et al. 2013).
This paper depicts the improvements achieved by the stretch processing approach over the matched filter pulse compression technique used to focus the SAR data in the range direction of the Range-Doppler algorithm. The validation process of these improvements is accomplished according to software and hardware implementations. The trend platform for radar implementation and research is software-defined radio (SDR). Particularly, Universal Software Radio Peripheral (USRP) can be used to replace analogue radar modules such as mixers, filters, modulators, and detectors, and it can be reconfigured and programmed in a flexible and fast manner with efficient performance (Dabrowski et al. 2020).
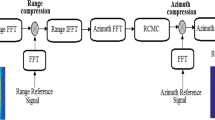
Based on the experimental results of Ashry et al. (2020), the response of the de-chirping (stretching) technique has finer resolution and lower PSLR compared with the matched filter response where the focusing process has been performed in one direction (range domain) for extracting the target’s ranges as shown in Fig. 1a. For conventional RDA, the received signal has been allocated in the form of a matrix represented by rows and columns. The compression of the data in the range direction has been accomplished based on the principle of the matched filter, as shown in the enclosed blue box in Fig. 1b. In this paper, we propose a modified RDA that depends on the de-chirping pulse compression technique for focusing the data in the range direction instead of the matched filter technique, as shown in the enclosed red box in Fig. 1b.

SAR image formation block diagram
Two NI-USRP 2932 units and NI LabVIEW® platforms are used in the hardware implementation; one USRP acts as a transmitter with a log-periodic antenna for linear-frequency modulated (LFM) signal transmission where the transmitted signal hits a target (corner-reflector) at a certain distance, and the returned echoes are processed and detected within the receiver bandwidth of the second USRP unit. The matched filter and stretch range focusing techniques are used to achieve the detection process. In contrast to text-based tools like C, C + + , Java, and MATLAB, LabVIEW is a visual programming tool that uses visual elements as programming structures. SDR-based studies typically use LabVIEW software, where the front panel and the block diagram are the two sections of the LabVIEW programming architecture. By using elements from the functions palette and connecting them with virtual cables in the block diagram panel, you can simply build a program.
Mathematical modeling measurement, signal processing, and data communication are just a few of the functions available in LabVIEW. In LabVIEW, there are three types of elements: control, indicator, and constants. Control elements are used to control the values of some functions by introducing a value into the front panel; the result is displayed on the front panel by the indicator (Gokceli et al. 2017).
The presence of sidelobe levels in the response to any compressed signal during SAR signal processing stage may result in ambiguities and undesirable consequences in the detection process, such as a reduction in the probability of target recognition and an increase in the probability of false alarm rates. In order to suppress sidelobes and enhance range resolution, this research focuses on designing a better SAR range-Doppler (RD) algorithm. This can be accomplished using stretch processing pulse compression approach instead of the conventional matched filter technique for the signal processing stage of the RD algorithm.
In the following section, we start off by outlining the general methodology of the LFM-CW radar system and how they are implemented using the SDR architecture. Additionally, we covered the matched filter technique and the stretch processing approach, which are the most popular radar pulse focusing techniques. This section is concluded by a proposed SAR range-Doppler algorithm that uses the stretching approach rather than the matched filter technique for the range compression process. Simulations, results, and interpretation are explained in the “Simulation, results, and discussion” section, which analyses the system performance simulation implemented using platforms such as LabVIEW and the USRP. A comparison between the proposed RDA and the conventional one is also presented to see the impact of the proposed algorithm on the range resolution and the level of the sidelobes. Finally, the conclusion is discussed in the simulation and results section.
Methodology
Recently, frequency-modulated continuous wave (FM-CW) radars become vital demand for synthetic aperture radar (SAR) systems due to their high range resolution, low power consumption, and cost-effectiveness (Wang et al. 2017). Besides, the low sampling rate, minimum target range detection, and miniaturized system design are the main advantages of LFM-CW which all motivates demands for FM-CW radars in many applications (Charvat and Kempel 2006; Ting et al. 2017).
Linear FM continuous wave (LFM-CW) radars transmit continuously wide pulses with LFM signal that is the predominant waveform in most radar systems because it achieves fine range resolution and it is insensitive to the Doppler frequency shift, even if the received signal echo has a large Doppler shift (Yang et al. 2018). LFM signal is characterized by a large time-bandwidth product (TBP), low probability of intercept (LPI), and achievement of a long detection range (Skolnik 1962). Linear FM signal modeling depends mainly on the stationary phase principle, which allows using a predefined shape of the power spectral density (PSD) function for generating the synthesis of the corresponding signal waveform (Jin et al. 2019). In this section, the generation of the LFM waveform is represented based on the principle of stationary phase (POSP) (Vizitiu et al. 2012).
The complex baseband LFM signal can be represented in the analytical form as
where \(\beta\) is the FM rate, \(t\) is a fast time, and \(T\) is the radar signal pulse duration.
The linear FM signal has an approximately rectangular shape denoted as \(w\left(t\right)\).
The instantaneous frequency of the linear FM signal can be denoted as
where \(\varnothing \left(t\right)\) is the signal phase expressed as \(\varnothing \left(t\right)= \pi \beta {t}^{2}\).
Equation (3) shows that the instantaneous frequency is linearly independent on the fast time; zero central frequency spectrum of the linear FM signal can be obtained by applying the Fourier transformation to Eq. (1), which is
This integration will not be a straightforward as the signal has a quadratic phase component, which will not be simply integrated using normal integration methods, then using the POSP procedures denoted in Table 1 to get a simple expression of the signal frequency characteristics.
-
Step 1:
The integrant phase of (4) is
Then, the derivative of this integrand phase at the stationary point (i.e., the derivation result is set to zero) will be:
-
Step2:
The frequency vs. time relationship is
-
Step3:
Transformation of the signal phase and shape to the frequency domain
Then, the linear FM signal spectrum can be modeled according to the following equation
The main advantage of the LFM-CW radar over the pulsed radar is that the transmission duration of LFM-CW radar is much longer than pulsed radars, i.e., signals contain more energy, which increases SNR and the detection range (Zaugg and Long 2008). The de-chirp-on-receive (stretch processing) technique is preferred for LFM-CW SAR processing due to its good resolution and lower sampling frequency (Duersch 2013). SNR index is an essential factor for synthetic aperture radar SAR imaging where the higher levels of the SNR lead to more details about the imaging target (Chan and Koo 2008). The correlation technique is the dominant algorithm for most remote sensing applications where it achieves higher SNR compared with the de-chirping technique.
Theoretically, improving the average transmitted power is the primary key for enhancing the SNR. This idea could be achieved using a linear frequency modulated-continuous wave signal. Therefore, the SNR of the de-chirping technique could be increased by using the LFM-CW signal in the transmission stage (Duersch 2004).
In terms of hardware, FM-CW radar uses the emerging technologies of a solid state amplifier for generating the transmitted signal , this transmitter is more compact and less expensive compared to the magnetrons used in the pulses radar (Li and O’Young 2015). Continuous signal transmission and reception, on the other hand, result in some of the transmitted power appearing as a strong echo at the receiving antenna. This phenomenon is known as the power feed through problem that is a critical flaw of the FM-CW radar (Li 2016). Because of its lightweight, low cost, and fine resolution, the LFM-CW SAR could be integrated with unmanned aerial vehicles (UAV) for military compactness and small-scale applications (Duersch 2004). The RF module and the radar components are the most important parts of any software-defined radar system, as shown in Fig. 2.

Basic concept of software-defined radar (SDR) system
A low noise amplifier, phase locked loops, voltage-controlled oscillator, and the antenna for transmission and reception are all included in the RF module. Modulators, demodulators, filters, and mixers are among the radar modules that can be designed and constructed using the SDR software platform on some kind of FPGA, DSP, or PC.
Pulse focusing techniques
Pulse compression techniques aim to keep the transmitted pulses as shorter as possible while keeping the peak power under the practical system limitations. This technique enables the radar system to achieve a combination of short transmitted pulses and high average transmitted pulse power (Hubbard 2012). The target resolution is the capability of radar to discriminate between targets that are nearby in either range or bearing. While range resolution \(\Delta r\) is the radar’s ability to distinguish between two or more targets that have the same bearing but at different ranges (Ashry et al. 2022), it could be expressed as follows:
It is obvious that fine range resolution could be achieved by using a pulse duration \(\tau\) as shorter as possible. One vital issue for designing an efficient radar system is the ability to distinguish between two targets that are very small, closed, and located at a long distance. This could be achieved by transmitting long pulses having sufficient power to detect small targets located at long ranges (Skolnik 1962). However, the transmission of long pulses will degrade the range resolution.
where \({P}_{peak}\) is the peak transmitted power, \({P}_{av}\) is the average transmitted power, and \(T\) is the pulse period.
Equation (12) shows that for a long detection range, the average power should be increased. This could be accomplished either by increasing the transmitted pulse-width \(\tau\) or by transmitting pulses with high peak power (Skolnik 1962). Meanwhile, using high peak power is unpractical and has many constraints, such as waveguide dimensions and voltage breakdown (Duersch 2013). Therefore, the transmitted pulse-width is a critical factor in the configuration of any radar system since increasing \(\tau\) deteriorates the range resolution while decreasing it will decrease both the detection range and the signal-to-noise ratio (SNR). For solving this dilemma, sufficient wide pulses could be transmitted to achieve the required average power. Then, the returned echoes are compressed to achieve fine range resolution. Such a process has been known as the pulse compression technique (Ashry et al. 2022).
Matched filter technique
Matched filter is considered an optimum technique for sensing the availability of the signal spectrum since it can achieve higher SNR in the presence of additive white Gaussian noise (AWGN). This technique is required in radar systems to get more information and details about the sensed target and to increase the probability of detection (Edwards 2009). The matched filter is designed to be the conjugate and time-reversed version of the returned radar signal where it is accomplished through the correlation method as shown in Fig. 3.
where \(X(t)\) is the input signal, \(Y(t)\) is the matched filter output, and \(h(t)\) is the matched filter response function.

Matched filter concept
Figure 4 represents the theoretical signal processing procedures of the matched filter technique: firstly, transforming the received signal \({S}_{r}\left(t\right)\) and the conjugate of the reference signal \({S}_{ref}^{*}\left(t\right)\) to the frequency domain using the FFT. The multiplication process between the two outputs was carried out using a mixer. Finally, the compressed signal \({S}_{rc}\left(t\right)\) could be obtained by applying an IFFT to the mixed-signal \({S}_{mix}\left(t\right)\) (Zaugg and Long 2008).

Signal processing procedures for the matched filter technique
In matched filter architecture, the received signal is sampled after being down-converted. Also, it is then used to determine the location or range profiles of the targets. As a result of using the matched filter, it is able to achieve the best SNR level. However, a high sampling rate analogue to digital converter is required for this architecture (ADC). This is a significant disadvantage of this architecture, as it raises the cost.
Stretch processing technique
Matched filter and stretch processing range focusing approaches are the most commonly architectures used in FMCW radar systems (Wang et al. 2008); (Das 2010). The implementation of the stretch processing architecture is processed in the time domain using a mixer that supports the necessary bandwidth for the LFM waveforms (Li 2016). The beat frequency signal used for target detection is generated by mixing the received and transmitted signals. Fast Fourier transform (FFT) is applied to the sampled signal to determine target location or range profile. Meanwhile, it provides high-resolution imaging at a low sampling rate, making it suitable for a wide range of applications. Recalling the following mathematical relations for understanding how the de-chirping technique works.
where \(x\), \(y\) are arbitrary constants and \({t}_{d}\) is a time delay.
The difference results from multiplying two linear FM signals having the same rate \(\beta\). It gives a constant (single-tone) that depends only on the relative time difference between the two signals. Consequently, the stretching technique results from the multiplication between the returned signal and the reference or de-stretch signal giving a single-tone frequency that varies proportionally with the different time of the two signals. Figure 5 shows the de-chirping process represented by a frequency vs. time plot that could mathematically be modeled as follows:

Stretch processing concept
Where \({t}_{rx}\) the delay is the time of the received signal and \({t}_{ref}\) is the delay time of the de-stretched signal.
Equation (17) shows that when the signal is “stretched” enough in the frequency domain. The summation term could be ignored due to its insignificant power level, while the subtraction term is the desired one; the result will be:
Then, the instantaneous frequency can be calculated as
Now, every target will have its instantaneous frequency that could be used for calculating its range according to the following equation.
Generally, the de-chirp (stretch) processing technique achieves finer resolution and more sidelobe cancelation compared with the matched filter technique. However, it achieves lower SNR that is considered a key parameter for any radar system (Duersch 2013). For SAR, high SNR will improve the quality of SAR image and obtain more details about the target Zaugg (2010). As result, there is a trade-off between the two compression techniques as the de-chirping technique will give fine resolution and more sidelobe attenuation but losing some of the target details that have been achieved perfectly by the matched filter technique (Edwards, 2009).
Recently, researchers use LFM-CW for improving the stretching technique SNR. This can be achieved by the integration between the LFM-CW and the stretching technique, which in turns will enhance the performance of the stretching technique especially for the SNR index Daum (2008). Figure 6 shows the processing steps of the de-chirping (stretching) technique. Firstly, the received signal \({S}_{r}\left(t\right)\) is mixed with a reference signal \({S}_{ref}\left(t\right)\), then the output is applied to a low pass filter for removing the higher frequencies, and narrow-band filters that make the same functionality of the FFT have been applied after the low pass filtering for extracting the target tone where each tone refers to the target range (Ashry et al. 2020).

Signal processing procedures for the stretch processing technique
After applying FFT to the sampled signal, a single tone appears at a certain frequency \({f}_{i}\), and each frequency is corresponding to the target range \({R}_{i}\) that is mathematically related to the bandwidth \(Bw\) as
Compression of wideband waveforms using a single processor that has smaller bandwidth can be performed by the de-chirping technique without deterioration in the range resolution or SNR Daum (2008). For stretch processing, the target range is corresponding to a spike in the time domain. However, for the matched filter, a single tone in the frequency domain is corresponding to the target’s range. Consequently, a smaller bandwidth could be achieved by the stretch technique that reduces the bandwidth of the LFM waveform to the level suitable for the sampling of the ADC.
Proposed range-Doppler algorithm
Since the energy reflected from targets with the same slant range but located separately in the azimuth direction could be resolved into the same location in the azimuth frequency domain. Then, the correction process of a certain target trajectory will efficiently correct a group of targets having the same slant range. This is the key feature of the RD algorithm (Vizitiu et al. 2012).
Conventional Range-Doppler algorithm depends on the matched filter technique for concentrating the complex raw data in the range direction. As mentioned above, the de-chirping (stretch) processing technique provides finer resolution and more sidelobes attenuation compared with the matched filter technique. Then, the enhancement process applied to the conventional RD algorithm can be achieved by using the de-chirping technique for focusing SAR data in the range direction instead of the correlation technique by means of the stretch range focusing approach.
Figure 7 illustrates the processing steps for the proposed RD algorithm, starting from the stretch range focusing process, and then applying the other signal processing steps of the conventional algorithm, (i.e., we introduce an integrated method between the stretch range focusing algorithm and the RD algorithm).

Processing steps for the proposed algorithm
This section discusses the procedures for the stretch range focusing process applied to SAR data and considers a target at range \(R\) away from the imaging radar, and its reflection coefficient is \({\sigma }_{0}\), and then the signal received from this target could be represented as
where \(\eta\) is the azimuth time (slow time), \(\beta\) is the LFM signal rate, and \({f}_{c}\) is the radar carrier frequency.
Consider a reference signal \({S}_{ref}\left(t\right)\) which is a replica of the transmitted chirp signal be defined as
Mixing the received baseband signal \({S}_{r}\left(t.\eta \right)\) in (23) with the conjugate of the reference signal \({{S}_{ref}}^{*}\left(t\right)\) and then the output signal has been applied to a low pass filter (LPF) for high-frequency components suppression where only the frequency of the echoes picked up after range FFT, then
When \(\left(\beta ={~}^{B}\!\left/ \!{~}_{T}\right.\right)\), then
Since \(T>>\left(\frac{2R\left(\eta \right)}{C}\right)\), then the mixed signal becomes
Now, the instantaneous frequency can be acquired as
Equation (27) shows that the instantaneous frequency \({f}_{instant}\) varies directly with the target range \(R\left(\eta \right)\) at a certain azimuth time \({\eta }_{i}\). The extraction of the target’s tones has been achieved by sampling \({S}_{mix}\left(t.\eta \right)\) and applying range FFT, where each tone refers to a certain calculated range as follows:
After completing the range focusing process, now the range compressed data needs to be completely focused on a single point by means of the azimuth focusing process with the processing procedures illustrated above in Fig. 7.
Simulation, results, and discussion
This section investigates the implementation of the conventional range-Doppler algorithm and the stretch range focusing approach using simulated SAR raw data. Also, for validating the performance of the proposed algorithm over the conventional one, a comprehensive analysis is accomplished according to some radar signal processing indices. For hardware validation of the two techniques, LabVIEW programs are designed for the two approaches. Then, these programs are implemented using the NI-USRP SDR platform.
Comparative analysis of the two pulse focusing algorithms according to software implementation
The peak sidelobe ratio (PSLR), integrated sidelobe ratio (ISLR), and signal-to-noise ratio (SNR) are used as criteria for evaluating the precision of the proposed RD algorithm Wang et al (2008). The IRW refers to measuring the width of the main lobe at (3 dB) below the highest peak value to determine the resolution of SAR images. PSLR and ISLR are critical parameters for determining SAR’s ability to identify and detect weak echoes in the context of the neighborhood relationship between bright and strong echoes Das (2010). PSLR is defined as the ratio of the main lobe’s ultimate intensity to the sidelobe with the greatest ultimate intensity. However, ISLR is defined as the ratio of the energy contained in the main lobe to the side-lobe energy Lukin and Vyplavin (2012), and they are calculated as
where \({I}_{s}\) is the ultimate intensity in the sidelobe and \({I}_{m}\) is the ultimate intensity in the main lobe.
where \(g(\tau )\) stands for the impulse response function in the range or azimuth direction (a, b) stands for the range of the main lobe as illustrated in Fig. 8.

Processing impulse response function
To assess the performance of the proposed algorithm, we use complicated SAR raw data where the designed scene uses an overlapped data for three targets located at the same range bins as shown in Fig. 9. SAR system parameters such as the carrier frequency, platform velocity, platform altitude… etc. all are listed in Table 2.

Point target representation
For SAR image reconstruction, Fig. 10a, b shows the reconstructed SAR image using the conventional RD algorithm and the proposed algorithm, respectively.

Reconstructed point targets
Based on visual inspection, the reconstructed three-point targets of the proposed algorithm are more focused than the reconstructed targets of the conventional algorithm (i.e., the proposed algorithm improves the level of targets intensity and their bounded contour sharpness). From these simulated results, the proposed algorithm enhances target appearance w.r.t its surrounding background (i.e., enhances the overall target to clutter/background ratio (TCR)), thus facilitating the target detection criteria.
To evaluate the performance of the proposed algorithm, the simulation is conducted based on a single-point target analysis. Based on the proposed imaging algorithm (stretch focusing technique), the amplitude plot of the compressed data in the range direction and its amplitude response is shown in Fig. 11a, respectively. It is obvious that the compressed signal of the proposed imaging results is more focused and the sidelobe levels are greatly suppressed compared with the imaging results of the conventional RD algorithm shown in Fig. 11b.

Range focusing of point target
Figure 12 shows a more quantitative analysis of the sidelobe suppression process for both the proposed and the conventional algorithms. The proposed algorithm clearly suppresses the sidelobes and results in more power being concentrated in the main lobe, which improves image quality and efficiency.

Range amplitude comparison for the proposed RD algorithm and the conventional one
Intuitively, the stretch focusing technique produces more sharp and focusing data. Besides, its amplitude response has lower PSLR and ISLR, and the level of the sidelobes is more attenuated compared with the conventional RD algorithm. As a result, we conclude that the proposed imaging algorithm has better sidelobe suppression performance (i.e., the proposed algorithm has better SAR image focusing formation) based on the resultant simulated results. Point target analysis has been performed to assess the performance of the proposed algorithm. Table 3 presents the PSLR analysis for the proposed and conventional imaging algorithm, while the ISLR analysis for the two algorithms has been analyzed in Table 4.
The spatial resolution of the compressed signal for both the conventional and proposed algorithms in the range and azimuth direction is presented in Table 5.
From the presented simulation results in both range and azimuth directions, Table 3 shows that the PSLR of the conventional RD algorithm is about (− 15 dB), while the proposed algorithm reached about (− 24 dB), which is about 60% lower than the traditional algorithm. This improvement of PSLR leads to increase the probability of target detection and decrease the probability of false alarm rate. In Table 4, the ISLR of the conventional RDA was about (− 6 dB), while for the proposed algorithm it reached about (− 25 dB), which is suppressed by over 280%. This huge suppression of the sidelobes enhances the quality and the information content of the focused image to obtain more details about the imaging scene.
Table 5 shows that the spatial resolution of the compressed signal for the proposed algorithm is finer than the conventional one. For the range direction, the proposed algorithm can resolve and detect adjacent targets at range up to 1.9 m compared to the conventional algorithm, which achieves resolution of about 2.2 m. Finally, we concluded that the proposed algorithm improves the ability of the radar to detect weakly scattered targets merged with strongly scattered ones, which is achieved by the reduction process of PSLR. Besides that, the contrast of the SAR image will be improved according to the reduction of ISLR level compared with the conventional RD algorithm.
LabVIEW implementation of the two algorithms with NI USRP-2932
In general, SDR platforms could be used to implement the FMCW SAR system in real time at a low cost and with minimal complexity. Radar system research can be studied and analyzed in a low-cost environment using software-defined radio (SDR) platforms Woodbridge et al (2012). Figure 13 depicts the software-defined architecture for target echoes range focusing approaches, which consists of three main parts: signal generation, reception, and signal processing. The first NI USRP-2932 unit is in charge of transmitting the LFM signal, which is generated using the designed LabVIEW code. The echoes of the returned target are received by the second USRP unit, which is fed into the two range focusing (matched filter-stretch processing) algorithms.

System block diagram for hardware implementation
The major feature of the designed system in this paper is software programmability, which has a high degree of reconfigurability and flexibility. Besides that, a MIMO cable serves as a clock and reference frequency source for the transmitter and receiver’s synchronization. Figure 14a shows a hardware prototype for the FM-CW SAR where the radar signal is transmitted and received using a high directive log-periodic antenna with a frequency range of 800–2500 MHz. The two NI-USRP are connected to the laptop via a data switch. Corner reflector at a fixed distance from the transmitter and the received antenna serves as the target.

Hardware design of radar system
System synchronization setup is depicted in Fig. 14b, which is divided into two processes: splitter outputs (one of its output ports is connected to the transmitter antenna and the other output port is connected to the reception port of the transmitted USRP) and MIMO cable connection, which is responsible for the correlation process between the received signal and the reference signal. Table 1 shows the design specifications for the FM-CW system.
Discussion
The real-time implementation for the radar pulse compression techniques is modeled in both software and hardware domains. The signal processing stage is the main core of the software domain, and it is based primarily on the stretch processing approach and the matched filter compression technique. Figure 15 illustrates the signal processing procedures for obtaining the SAR raw data range compressed based on the compression techniques mentioned above.

SAR data range focusing based on the stretch processing (SP) approach and the matched filter technique
For the matched filter technique, the received target’s echoes are cross-correlated with the stored LFM signal replica. While for the stretch processing approach, after receiving the returned echoes, it mixed with the stored LFM signal which is a replica of the transmitted signal. Then, an LPF with a cutoff frequency of 2 MHz is designed to avoid the high-frequency components resulting from the mixer output. An FFT process is applied to the filter output for deriving the amplitude response of the extracted tones. Each tone frequency is related to a certain target’s range. The red dashed section illustrates the data collection process of the compressed data in both the fast time direction (range direction) and the slow time direction (azimuth direction). While for the hardware domain, NI-USRP (2932) is utilized for the transmission and reception of the radar signal.
IQ rate, carrier frequency, antenna gain, and TX/RX port are the variable parameters that control the functionality of the USRP. A LabVIEW algorithm is designed to configure the USRP modules to function as either a transmitter or a receiver.
Figure 16 shows the IQ representation of the transmitted chirp signal and its frequency response. Figure 17 depicts the block diagram of the signal generation algorithm. The generated LFM complex signal is sent to the transmitted USRP for wireless signal transmission (Fig. 18).

Transmitted LFM signal representation and its frequency response

LabVIEW code for the chirp signal transmitter block diagram

Amplitude comparison between the stretch processing algorithm and the matched filter one
The transmitted complex signal travels through the space and illuminates the target (corner reflector) at a certain range. A portion of the reflected signal is captured by the log antenna connected to the received USRP. Figure 19a depicts the receiver block diagram for the designed code indicated in two main algorithms that are the range focusing approaches (matched filter-stretch processing), as long as the target’s echoes are fetched and processed according to the two algorithms; they will be saved in a specified spreadsheet on the PC. Following that, the stored echoes will be read into MATLAB for obtaining the range-focused data illustrated.

LabVIEW code for range focusing of the target’s echoes
The amplitude response of the range focused data after applying the range compression algorithm for the matched filter is shown in Fig. 19b. While the de-chirping algorithm amplitude response is shown in Fig. 19c by taking a section through certain azimuth bin along the azimuth direction of the range focused data.
The amplitude comparison of the focused signal in the range direction for both the matched filter and the stretch processing algorithm is shown in Fig. 18.
According to visual inspection, we conclude that the stretch processing algorithm has finer range resolution, lower PSLR, and more sidelobe cancelation. This conclusion is verified based on the point target analysis shown in Table 6. The measurements of the IRW, PSLR, and ISLR indices were used to construct this analysis.
The following conclusions can be drawn from the previous data.
-
The matched filter algorithm has a PSLR of about (− 10) dB, whereas the proposed algorithm has PSLR of about (− 13) dB, which was about (23%) lower than the traditional algorithm. This improvement of PSLR increases the probability of target detection while lowering the probability of false alarm rate. Moreover, The proposed algorithm’s ISLR is around (− 13.2) dB, which is suppressed by over (26%) compared to the matched filter algorithm’s ISLR of about (− 10.5) dB. The quality and information content of the focused image is improved due to the significant suppression of the sidelobes. The obtained information about the imaging scene is also enhanced.
-
The stretch processing approach provides finer resolution for focusing data in the range direction than the matched filter algorithm. Similarly, the stretching algorithm suppresses sidelobes more than the correlation algorithm.
Conclusion
In this paper, a proposed RD algorithm for SAR data focusing has been presented, discussed, and analyzed. Moreover, a complete mathematical model for the proposed algorithm has been derived. The key of the proposed algorithm is the range compression of the data based on the stretch range focusing technique rather than the matched filter technique used in the conventional RD algorithm. Some quantitative indices such as PSLR, ISLR, and SNR have been discussed and measured for validating that the proposed algorithm provides better-focusing abilities. Simulated results analysis showed that the proposed algorithm accomplishes more focusing capabilities and more side-lobe suppression compared with the conventional RD algorithm. Also, for real-time performance validation of the proposed algorithm, LabVIEW-designed codes for the two algorithms have been tested and validated using NI-USRP 2932 hardware platform to ensure the results of simulated experiments.
References
Ashry MM, Mashaly AS, Sheta BI (2020) Comparative analysis between SAR pulse compression techniques. In: 2020 12th International Conference on Electrical Engineering (ICEENG), IEEE, pp 234–240
Ashry MM, Mashaly AS, Sheta BI (2022) Improved SAR range Doppler algorithm based on the stretch processing architecture. In: 2022 International Telecommunications Conference (ITC-Egypt), IEEE, pp 1–6
Baraniuk R, Steeghs P (2007) Compressive radar imaging. In: 2007 IEEE radar conference, IEEE, pp 128–133
Berens P (2006) Introduction to synthetic aperture radar (sar). Tech. rep.,FGAN-FHR Research Inst For High Frequency Physics And Radar Techniques.
Chan YK, Koo V (2008) An introduction to synthetic aperture radar (SAR). Progress Electromagnet Res B 2:27–60
Charvat GL, Kempel LC (2006) Low-cost, high resolution x-band laboratory radar system for synthetic aperture radar applications. In: 2006 IEEE International Conference on Electro/Information Technology, IEEE, pp 529–531
Clemente C, Soraghan JJ (2012) Range Doppler and chirp scaling processing of synthetic aperture radar data using the fractional Fourier transform. IET Signal Proc 6(5):503–510
Cumming IG, Wong FH (2005) Digital processing of synthetic aperture radar data. Artech House 1(3):111–231
Curlander JC, McDonough RN (1991) Synthetic aperture radar, vol 11. Wiley, New York
Dabrowski G, Stasiak K, Drozdowicz J, et al (2020) An x–band FMCW radar demonstrator based on an SDR platform. In: 2020 21st International Radar Symposium (IRS), IEEE, pp 103–106
Das SK (2010) Synthetic aperture radar image quality measurements
Daum F (2008) Radar handbook, (mi skolnik, ed; 2008)[book review]. IEEE Aerosp Electron Syst Mag 23(5):41–41
Duersch MI (2004) BYU micro-SAR: a very small, low-power LFM-CW synthetic aperture radar. Brigham Young University
Duersch MI (2013) Backprojection for synthetic aperture radar. Brigham Young University
Edwards MC (2009) Design of a continuous-wave synthetic aperture radar system with analog dechirp. Brigham Young University
Fang J, Xu Z, Zhang B et al (2013) Fast compressed sensing SAR imaging based on approximated observation. IEEE J Selected Topics Appl Earth Observations Remote Sens 7(1):352–363
Gokceli S, Karabulut Kurt G, Anarim E (2017) Cognitive radio testbeds: state of the art and an implementation. Spectrum access and management for cognitive radio networks pp 183–210
Guaragnella C and D’Orazio TJS (2019). “A data-driven approach to SAR data-focusing.” 19(7): 1649.
Hubbard Z (2012) Stretch processing radar RFIC system analysis and front-end design. PhD thesis
Jin G, Deng Y, Wang R et al (2019) An advanced nonlinear frequency modulation waveform for radar imaging with low sidelobe. IEEE Trans Geosci Remote Sens 57(8):6155–6168
Kabalci E, Kabalci Y (2019) From smart grid to internet of energy. Academic Press
Klauder JR, Price A, Darlington S et al (1960) The theory and design of chirp radars. Bell Syst Tech J 39(4):745–808
Li Y (2016) Frequency-modulated continuous-wave synthetic-aperture radar: improvements in signal processing. PhD thesis, Memorial University of Newfoundland
Li Y, O’Young S (2015) Focusing bistatic FMCW SAR signal by range migration algorithm based on fresnel approximation. Sensors 15(12):32,123-32,137
Lukin K, Vyplavin P (2012) Integrated sidelobe ratio in noise radar receiver. In: 2012 13th International Radar Symposium, IEEE, pp 479–482
Maître H (2013) Processing of synthetic aperture radar (SAR) images. John Wiley & Sons
Richards JA (2009) Remote sensing with imaging radar. Springer
Skolnik MI (1962) Introduction to Radar. Radar Handbook 2:21
Ting JW, Oloumi D, Rambabu K (2017) FMCW SAR system for near distance imaging applications—practical considerations and calibrations. IEEE Trans Microw Theory Tech 66(1):450–461
Torres JA, Davis RM, Kramer JDR et al (2000) Efficient wideband jammer nulling when using stretch processing. IEEE Trans Aerosp Electron Syst 36(4):1167–1178
Vizitiu I, Anton L, Popescu F, et al (2012) The synthesis of some NLFM laws using the stationary phase principle. In: 2012 10th International Symposium on Electronics and Telecommunications, IEEE, pp 377–380
Wang R, Loffeld O, Nies H et al (2008) Chirp-scaling algorithm for bistatic SAR data in the constant-offset configuration. IEEE Trans Geosci Remote Sens 47(3):952–964
Wang Y, Lou L, Chen B et al (2017) A 260-mw Ku-band FMCW transceiver for synthetic aperture radar sensor with 1.48-ghz bandwidth in 65-nm CMOS technology. IEEE Trans Microwave Theory Tech 65(11):4385–4399
Wang J, Cai D, Wen Y (2011) Comparison of matched filter and dechirp processing used in linear frequency modulation. In: 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering, IEEE, pp 70–73
Woodbridge K, Chetty K, Young L et al (2012) Development and demonstration of software-radio-based wireless passive radar. Electron Lett 48(2):120–121
Yang R, Li H, Li S, et al (2018) Linear frequency modulation pulse signal. In: High-Resolution Microwave Imaging. Springer, p 83–118
Zaugg EC (2010) Generalized image formation for pulsed and LFM-CW synthetic aperture radar. Brigham Young University
Zaugg EC, Long DG (2008) Theory and application of motion compensation for LFM-CW sar. IEEE Trans Geosci Remote Sens 46(10):2990–2998
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Responsible Editor: Biswajeet Pradhan
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ashry, M.M., Mashaly, A.S. & Sheta, B.I. Proposed SAR range focusing algorithm based on simulation analysis and SDR implementation. Arab J Geosci 16, 476 (2023). https://doi.org/10.1007/s12517-023-11569-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12517-023-11569-w