
Abstract
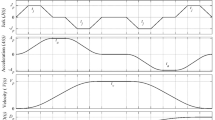
We studied the methods that are used for analyzing and optimizing the dynamic performance of mechanical systems in the startup stage under different driving functions. Especially, we considered the effects of joint clearance and component flexibility. The dynamic model of mechanical system is the basis of our methods. A higher order polynomial was used for describing the driving form of mechanical system, and the initial jerk and accelerating time length were employed to determine the specific driving function. Besides, we presented three performance evaluation parameters for mechanical system and introduced surrogate models to improve performance evaluation efficiency. Then, the optimal driving function was determined by using the surrogate models and a multi-objective optimization algorithm. Finally, a planar slider-crank mechanism with a clearance joint was taken as an example to demonstrate our methods.
Similar content being viewed by others

References
X. Liu and J. M. McCarthy, Design of a continuum mechanism that matches the movement of an eight-bar linkage, J, of Mechanisms and Robotics, 12(6) (2020) 061013.
Q. Qiao, J. Yuan, Y. Shi, X. Ning and F. Wang, Structure, design, and modeling of an origami-inspired pneumatic solar tracking system for the NPU-phonesat, J. of Mechanisms and Robotics, 9(1) (2017) 011004.
J. Ding, C. Wang and H. Wu, Accuracy analysis of a parallel positioning mechanism with actuation redundancy, Journal of Mechanical Science and Technology, 33(1) (2019) 403–412.
H. Wu, C. Wang, Z. Ding, J. Ding, Y. Dong and J. Man, Optimization design of a landing gear under uncertain landing attitude, J. of Astronautics, 39(12) (2018) 1323–1331.
Z. Wang, Q. Tian, H. Hu and P. Flores, Nonlinear dynamics and chaotic control of a flexible multibody system with uncertain joint clearance, Nonlinear Dynamics, 86 (2016) 1571–1597.
S. Atay, M. Bryant and G. Buckner, The spherical rolling-flying vehicle: dynamic modeling and control system design, J. of Mechanisms and Robotics, 13(5) (2021) 050901.
S. Erkaya and I. Uzmay, Investigation on effect of joint clearance on dynamics of four-bar mechanism, Nonlinear Dynamics, 58 (2009) 179–198.
S. Erkaya and I. Uzmay, Determining link parameters using genetic algorithm in mechanisms with joint clearance, Mechanism and Machine Theory, 44(1) (2009) 222–234.
P. Flores, A parametric study on the dynamic response of planar multibody systems with multiple clearance joints, Nonlinear Dynamics, 61 (2010) 633–653.
Y. Lu, S. Song, C. Wang and F. Zeng, Dynamic analysis for lunar lander based on rigid-flexible coupled model, J. of Beijing University of Aeronautics and Astronautics, 36(11) (2010) 1348–1352.
E. Zheng, R. Zhu, S. Zhu and X. Lu, A study on dynamics of flexible multi-link mechanism including joints with clearance and lubrication for ultra-precision presses, Nonlinear Dynamics, 83 (2016) 137–159.
J. F. Archard, Contact and rubbing of flat surfaces, J. of Applied Physics, 24 (1953) 981–988.
X. Lai, H. He, Q. Lai, C. Wang, J. Yang, Y. Zhang, H. Fang and S. Liao, Computational prediction and experimental validation of revolute joint clearance wear in the low-velocity planar mechanism, Mechanical Systems and Signal Processing, 85 (2017) 963–976.
X. Zheng, F. Zhang and Q. Wang, Modeling and simulation of planar multibody systems with revolute clearance joints considering stiction based on an LCP method, Mechanism and Machine Theory, 130 (2018) 184–202.
Y. Zhang, Y. Gu, T. Liu, J. Zhao and S. Yan, Dynamic behavior and parameter sensitivity of the free-floating base for space manipulator system considering joint flexibility and clearance, J. of Mechanical Engineering Science, 233(3) (2019) 895–910.
Y. Li, C. Wang and W. Huang, Dynamics analysis of planar rigid-flexible coupling deployable solar array system with multiple revolute clearance joints, Mechanical Systems and Signal Processing, 117 (2019) 188–209.
G. Wang and L. Wang, Dynamics investigation of spatial parallel mechanism considering rod flexibility and spherical joint clearance, Mechanism and Machine Theory, 137 (2019) 83–107.
T. Lv, Y. Zhang, Y. Duan and J. Yang, Kinematics and compliance analysis of double wishbone air suspension with frictions and joint clearances, Mechanism and Machine Theory, 156 (2021) 104127.
Q. Ding, C. Feng, Z. Li and Z. Wu, Study on DHMM fault diagnostic methods for rotating machinery during run-up, J. of Vibration Engineering, 16(1) (2003) 41–45.
J. Yuan, S. Xia, W. Zong, B. Zhou and Y. Fu, Transient stress characteristic during centrifugal pumps start-up based on fluent-structure interaction, J. of Vibration and Shock, 35(12) (2016) 196–201.
X. Liu, Structure of jerk-continuous cam curve suitable for special requirements, Heavy Machinery, 5 (2010) 46–51.
S. Lu, Y. Zhao, J. He and S. Chen, Trajectory planning of a 4-DOF parallel kinematic manipulator while considering jerk impact, China Mechanical Engineering, 25(6) (2014) 784–788.
J. Huang, P. Hu, K. Wu and M. Zeng, Optimal time-jerk trajectory planning for industrial robots, Mechanism and Machine Theory, 121 (2018) 530–544.
A. Alzaydi, Time-optimal, minimum-jerk, and acceleration continuous looping and stitching trajectory generation for 5-axis on-the-fly laser drilling, Mechanical Systems and Signal Processing, 121 (2019) 532–550.
Y. Fang, J. Qi, J. Hu, W. Wang and Y. Peng, An approach for jerk-continuous trajectory generation of robotic manipulators with kinematical constraints, Mechanism and Machine Theory, 153 (2020) 103957.
H. M. Lankarani and P. E. Nikravesh, A contact force model with hysteresis damping for impact analysis of multibody systems, J. of Mechanical Design, 112(3) (1990) 369–376.
W. Xiang, S. Yan, J. Wu and W. Niu, Dynamic response and sensitivity analysis for mechanical systems with clearance joints and parameter uncertainties using Chebyshev polynomials method, Mechanical Systems and Signal Processing, 138 (2020) 106596.
M. Qian, Z. Qin, S. Yan and L. Zhang, A comprehensive method for the contact detection of a translational clearance joint and dynamic response after its application in a crank-slider mechanism, Mechanism and Machine Theory, 145 (2020) 103717.
L. Chen, Mechanical System Dynamics Analysis and ADAMS Application Tutorial, Tsinghua University Press, Beijing (2005).
R. R. J. Craig and M. C. C. Bampton, Coupling of substructure for dynamic analyses, AIAA J., 6(7) (1968) 1313–1319.
X. He, The analysis on ADAMS dynamic simulation algorithm and parameters select, Drive System Technique, 19(3) (2005) 27–30.
D. Rand, Dynamical Systems and Turbulence (Lecture Notes in Mathematics), Springer-Verlag, New York, USA (1982).
A. M. Fraser and H. L. Swinney, Independent coordinates for strange attractors from mutual information, Physical Review A, 33(2) (1986) 1134–1140.
M. B. Kennel, R. Brown and H. D. I. Abarbanel, Determining embedding dimension for phase-space reconstruction using a geometrical construction, Physical Review A, 45(6) (1992) 3403–3411.
H. Wu, W. Niu, S. Wang, S. Yan and T. Liu, Sensitivity analysis of input errors to motion deviations of underwater glider based on optimized response surface methodology, Ocean Engineering, 209 (2020) 107400.
J. Wang, C. Wang and J. Zhao, Frequency response function-based model updating using kriging model, Mechanical Systems and Signal Processing, 87 (2017) 218–228.
H. Wu, W. Niu, S. Wang and S. Yan, An optimization method for control parameters of underwater gliders considering energy consumption and motion accuracy, Applied Mathematical Modelling, 90 (2021) 1099–1119.
M. Fu, L. Lei, G. Yang and B. Li, Multi-objective shape optimization of autonomous underwater glider based on fast elitist non-dominated sorting genetic algorithm, Ocean Engineering, 157 (2018) 339–349.
Acknowledgments
This work is supported by the National Natural Science Foundation of China (Grant No. 11872033) and the Natural Science Foundation of Beijing Municipality (Grant No. 3172017).
Author information
Authors and Affiliations
Corresponding author
Additional information
Hongyu Wu is a doctoral candidate in Mechanical Engineering, Tsinghua University, Beijing, China. He received his M.S. in Mechanical Engineering from Beihang University. His research interests include multibody dynamics, underwater glider technology, multidisciplinary optimization design, and landing buffer technology.
Rights and permissions
About this article

Cite this article
Wu, H., Zhang, Y. & Yan, S. Effect of driving functions with different jerk and accelerating time length on dynamic performance for mechanical systems: analysis and optimization. J Mech Sci Technol 36, 2225–2238 (2022). https://doi.org/10.1007/s12206-022-0406-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-022-0406-1