
Abstract
Co-simulation allows the parallelization of several subsystems in a distributed manner with data exchanges at discrete user-defined communication points (macro-time points). Between two macro-time points, subsystems are integrated in a local circumstance using specified solvers. By adopting the technique, the computational efficiency can be enhanced greatly without exposure of inner information. As a weak coupling, communication between subsystems is usually approximated by extrapolated or interpolated polynomials that may induce instability. Implicit or semi-implicit co-simulation with iteration of macro-time steps can improve stability behavior significantly. However, reinitialization may be unfeasible for realtime simulation or not supported by most commercial tools. Therefore, stabilized non-iterative co-simulation has been more popular that can be achieved either by appropriate communication techniques or by interface error estimations. However, the influence of the coupling approximations on numerical stability is not well understood. In this paper, the numerical stability of explicit co-simulation will be studied using different approximations of coupling techniques. The influence of communication schemes (parallel and sequential coupling scheme), least square as well as relaxation techniques using an applied force coupling approach will be investigated quantitatively with the help of a linear two-mass oscillator. A quarter car model is used to validate the stability analysis of the linear oscillator. The results indicate that by adopting appropriate coupling techniques, stability improvement can be accomplished. Higher order of extrapolation (interpolation) introduces damping to the distributed system while relaxation and least square approaches might trigger artificial oscillations.
Similar content being viewed by others


Abbreviations
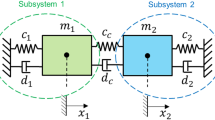
- c̄i(i = 1,2,c):
-
Dimensionless stiffness coefficient of subsystem 1, 2 and coupling element
- d̄i(i = 1,2,c):
-
Dimensionless damping coefficient of subsystem 1, 2 and coupling element
- mi(i = 1,2):
-
Mass of subsystem 1, 2
- α m21 :
-
Mass ratio of subsystem 2 w.r.t. subsystem 1
- αc21,αcc1 :
-
Stiffness ratio of subsystem 2 and coupling element w.r.t subsystem 1
- αd21,αdc1 :
-
Damping ratio of subsystem 2 and coupling element w.r.t subsystem 1
- zi(i = 1,2):
-
State vector of subsystem 1 and 2
- uN, uN−1, uN−2 :
-
Vector of coupling variables at macro-time point TN, TN−1 and TN−2
- f(ū):
-
Dimensionless coupling force in a force-force decomposition
- Ai(i = 1,2):
-
Coefficient matrix of subsystem 1 and 2
- fkex(t̄):
-
Extrapolated polynomials of order k
- fkin(t̄):
-
Interpolated polynomials of order k
- fmLS(t̄):
-
Extrapolated polynomials of order m using least square techniques
- f1Re(t̄):
-
Linear extrapolated polynomial using relaxation
- Re(λ̄1):
-
Real part of the eigenvalue of subsystem 1
- Im(λ̄1):
-
Imaginary part of the eigenvalue of subsystem 1
- \(\alpha_{Re(\overline{\lambda}_i)}\)(i = 2,c):
-
Real part ratio of the eigenvalue of subsystem 2 and coupling system w.r.t subsystem 1
- \(\alpha_{Im(\overline{\lambda}_i)}\)(i = 2,c):
-
Imaginary part ratio of the eigenvalue of subsystem 2 and coupling system w.r.t subsystem 1
- ε glo :
-
Global error of co-simulation method
References
W. G. Dettmer and D. Perić, A new staggered scheme for fluid-structure interaction, International Journal for Numerical Methods in Engineering, 93 (1) (2013) 1–22.
J. Rahikainen, X. González, M. Á. Naya, X. Sopanen and A. Mikkola, On the cosimulation of multibody systems and hydraulic dynamics, Multibody System Dynamics (2020).
M. A. Naya, X. Cuadrado, X. Dopico and U. Lugris, An efficient unified method for the combined simulation of multibody and hydraulic dynamics: Comparison with simplified and co-integration approaches, Archive of Mechanical Engineering, 58 (2) (2011) 223–243.
A. Recuero, X. Serban, X. Peterson, X. Sugiyama, X. Jayakumar and D. Negrut, A high-fidelity approach for vehicle mobility simulation: Nonlinear finite element tires operating on granular material, Journal of Terramechanics, 72 (2017) 39–54.
M. O. Neal and T. Belytschko, Explicit-explicit subcycling with non-integer time step ratios for structural dynamic systems, Computers & Structures, 31 (6) (1989) 871–880.
E. Lelarasmee, X. E. Ruehli and A. L. Sangiovanni-Vincentelli, The waveform relaxation method for time-domain analysis of large scale integrated circuits, IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 1 (3) (1982) 131–145.
J. Z. Wang, X. D. Ma and G. M. Hulbert, A gluing algorithm for distributed simulation of multibody systems, Nonlinear Dynamics, 34 (1-2) (2003) 159–188.
F. C. Tseng and G. M. Hulbert, A gluing algorithm for network-distributed multibody dynamics simulation, Multibody System Dynamics, 6 (4) (2001) 377–396.
J. Kraft, X. Meyer and B. Schweizer, Reduction of the computation time of large multibody systems with co-simulation methods, Cham (2019) 131–152.
M. Busch and B. Schweizer, Coupled simulation of multibody and finite element systems: An efficient and robust semi-implicit coupling approach, Archive of Applied Mechanics, 82 (6) (2012) 723–741.
A. Bautista, X. Montesinos and P. Pintado, Dynamic interaction between pantograph and rigid overhead lines using a coupled FEM — multibody procedure, Mechanism and Machine Theory, 97 (2016) 100–111.
B. Schweizer and D. Lu, Semi-implicit co-simulation approach for solver coupling, Archive of Applied Mechanics, 86 (12) (2014) 1739–1769.
T. Meyer, X. Li, X. Lu and B. Schweizer, Implicit co-simulation method for constraint coupling with improved stability behavior, Multibody System Dynamics (2018).
R. Kübler and W. Schiehlen, Two methods of simulator coupling, Mathematical and Computer Modelling of Dynamical Systems, 6 (2) (2000) 93–113.
B. Schweizer and D. Lu, Predictor/corrector co-simulation approaches for solver coupling with algebraic constraints, Journal of Applied Mathematics and Mechanics, 95 (9) (2014) 911–938.
M. Arnold, X. Burgermeister, X. Führer, G. Hippmann and G. Rill, Numerical methods in vehicle system dynamics: State of the art and current developments, Vehicle System Dynamics, 49 (7) (2011) 1159–1207.
M. Arnold, Stability of sequential modular time integration methods for coupled multibody system models, Journal of Computational and Nonlinear Dynamics, 5 (3) (2010) 1–9.
M. Benedikt and E. Drenth, Relaxing stiff system integration by smoothing techniques for non-iterative co-simulation, Cham (2019) 1–25.
M. Benedikt, X. Watzenig and A. Hofer, Modelling and analysis of the non-iterative coupling process for co-simulation, Mathematical and Computer Modelling of Dynamical Systems, 19 (5) (2013) 451–470.
C. Gomes, X. Thule, X. Deantoni, X. G. Larsen and H. Vangheluwe, Co-simulation: The past, future, and open challenges, Cham (2018) 504–520.
C. Gomes, X. Thule, X. Broman, X. G. Larsen and H. Vangheluwe, Co-simulation: A survey, ACM Computing Surveys, 51 (3) (2018).
M. Busch, Performance improvement of explicit cosimulation methods through continuous extrapolation, Cham (2019) 57–80.
M. Busch, Continuous approximation techniques for co-simulation methods: Analysis of numerical stability and local error, ZAMM - Journal of Applied Mathematics and Mechanics, 96 (2016) 1061–1081.
J. Rahikainen, X. González and M. Á. Naya, An automated methodology to select functional co-simulation configurations, Multibody System Dynamics, 48 (1) (2020) 79–103.
J. Zhao, X. Wang and H. Zhang, A regression-based collaborative filtering recommendation approach to time-stepping multi-solver co-simulation, IEEE Access (2019) 1–13.
M. Benedikt and F. R. Holzinger, Automated configuration for non-iterative co-simulation, 17th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE) (2016) 1–7.
A. Peiret, X. Kövecses, F. González and M. Teichmann, Interface models for multirate co-simulation of nonsmooth multi-body systems, Proceedings of the ASME Design Engineering Technical Conference (2019).
F. González, S. Arbatani, X. Mohtat and J. Kövecses, Energyleak monitoring and correction to enhance stability in the co-simulation of mechanical systems, Mechanism and Machine Theory, 131 (2019) 172–188.
A. Peiret, X. González, J. Kövecses and M. Teichmann, Multibody system dynamics interface modelling for stable multirate co-simulation of multiphysics systems, Mechanism and Machine Theory, 127 (2018) 52–72.
S. Sadjina, X. T. Kyllingstad, X. Skjong and E. Pedersen, Energy conservation and power bonds in co-simulations: Non-iterative adaptive step size control and error estimation, Engineering with Computers, 33 (3) (2017) 607–620.
S. Genser and M. Benedikt, A pre-step stabilization method for non-iterative co-simulation and effects of interface-jacobians identification, Advances in Intelligent Systems and Computing (2018).
P. Li, X. Yuan, X. Lu, X. Meyer and B. Schweizer, Improved explicit co-simulation methods incorporating relaxation techniques, Archive of Applied Mechanics, 90 (1) (2020) 17–46.
B. Schweizer, X. Lu and P. Li, Co-simulation method for solver coupling with algebraic constraints incorporating relaxation techniques, Multibody System Dynamics, 36 (1) (2015) 1–36.
T. Sweafford and H.-S. Yoon, Co-simulation of dynamic systems in parallel and serial model configurations, Journal of Mechanical Science and Technology, 27 (12) (2013) 3579–3587.
T. Moshagen, On meeting energy balance errors in co-simulations, Mathematical and Computer Modelling of Dynamical Systems, 25 (2) (2019) 139–166.
F. González, M. Naya, X. Luaces and M. González, On the effect of multirate co-simulation techniques in the efficiency and accuracy of multibody system dynamics, Multibody System Dynamics, 25 (4) (2011) 461–483.
P. Li, X. Lu and B. Schweizer, On the stability of explicit and implicit co-simulation approaches, ECCOMAS Thematic Conference on Multibody Dynamics (2015).
Acknowledgments
This work is supported by National Nature Science Foundation of China (No. 11902237, No. 11872289), China Postdoctoral Science Foundation (No. 2018M643622).
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editor No-cheol Park
Pu Li is a Post Doctor of the School of Energy and Power Engineering at Xi’an Jiaotong University, China. He received his Ph.D. in Mechanical Engineering from Technical University Darmstadt. His research interests include co-simulation and rotor dynamics.
Qi Yuan is a Professor of the School of Energy and Power Engineering, Xi’an Jiaotong University. His research interests include structural strength and vibration of turbomachinery, wind turbine and biofluid mechanics.
Rights and permissions
About this article

Cite this article
Li, P., Yuan, Q. Influence of coupling approximation on the numerical stability of explicit co-simulation. J Mech Sci Technol 34, 2289–2298 (2020). https://doi.org/10.1007/s12206-020-0504-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-020-0504-x