
Abstract
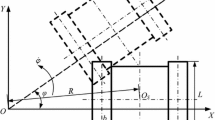
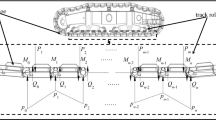
This study analyzes resistances to sinking, steering bulldozer, steering friction, running, climbing, inertia, and wind and considered the offsetting effects of instantaneous center of speed and center of mass based on the sinkage method proposed by Bekker. The purpose of the analysis is to show the calculation method for the driving power of crawlers under different working conditions. The influence of several performance factors were analyzed to calculate the steering performance of a dumping machine with heavy double crawler. The performance factors include steering radius, offset mass, width-to-length ratio, crawler width wider than the interior and lateral, caterpillar gauge in crawler drive, drive power, and steering torque friction. These factors are involved in driving wheels at a crawler speed of 3.33 RPM. The law of operation for heavy crawlers under different working conditions is obtained by performing a real vehicle test. The results of this test are compared with the theoretical calculations to verify correctness. Such a test provides important theoretical basis for theoretical modeling and for analyzing the performance of large crawlers running on soft ground.
Similar content being viewed by others

References
O. Benoit and Ph. Gotteland, Modelling of sinkage tests in tilled soils for mobility study, Soil & Tillage Research, 80 (2005) 215–231.
Q. Li, P. D. Ayers and A. B. Anderson, Modeling of terrain impact caused by tracked vehicles, Journal of Terramechanics, 44 (2007) 395–410.
T. D. Thai and T. Muro, Numerical analysis to predict turning characteristics of rigid suspension tracked vehicle, Journal of Terramechanics, 36 (1999) 183–196.
J. Y. Wong and W. Huang, Wheels vs. tracks -A fundamental evaluation from the traction perspective, Journal of Terramechanics, 43 (2006) 27–42.
Y. Gao and J. Y. Wong, The development and validation of a computer-aided method for design evaluation of tracked vehicles with rigid links, Journal of Automobile Engineering, 208 (1994) 207–215.
D. Rubinstein and G. N. Rekem, A design-oriented simulation program for off-road track vehicle, Journal of Terramechanics, 31 (1994) 329–352.
D. Rubinstein and R. Hitron, A detailed multi-body model for dynamic simulation of off-road tracked vehicles, Journal of Terramechanics, 41 (2004) 163–173.
G. Ferretti and R. Girelli, Modelling and simulation of an agricultural tracked vehicle, Journal of Terramechanics, 36 (1999) 139–158.
Q. Li, Modeling of terrain impact caused by off-road vehicles, Knoxville, Tennessee, US: The University of Tennessee (2006).
G. Alexandr, Thrust and slip of a track determined by the compression-sliding approach, Journal of Terramechanics, 44 (2007) 451–459.
K. Hun, J. Choi and H. Yoo, Development of a multi-body Dynamics simulation tool for tracked vehicles: (Part II, Application to track tension controller design): Special issue on multibody dynamics, JSME International Journal. Series C, Mechanical Systems, Machine Elements and Manufacturing, 46 (2) (2003) 550–556.
S. Bošnjaka, N. Zrnića and A. Simonovića, Failure analysis of the end eye connection of the bucket wheel excavator portal tie-rod support, Engineering Failure Analysis, 16 (3) (2009) 740–750.
D. J. Van Wyk, K. J. Spoelstra and J. H. KLerk, Mathematical modelling of the interaction between a tracked vehicle and the terrain, Applied Mathematical Modelling, 20 (1996) 838–847.
M. Bruce, A skid steering model with track pad flexibility, Journal of Terramechanics, 44 (2007) 95–110.
T. S. Nakanishi, On the numerical solution of tracked vehicle dynamic equations, Nonlinear Dynamics, 6 (4) (1994) 391–417.
M. Sarwar, T. Nakanish and A. Shabana, Chain link deformation in the nonlinear dynamics of tracked vehicles, Journal of Vibration and Control, 1 (2) (1995) 201–224.
J. Yamakawa and K. Watanabe, A spatial motion analysis model of tracked vehicles with torsion bar type suspension, Journal of Terramechanics, 41 (2004) 113–126.
W. Merhof and E. M. Hackbarth, Tracked vehicle mechanics, National defence of Industry Press, Beijing (1989).
J. Y. Wong, Terramechanics and off-road vehicle, Elsevier Science Publishers B.V., Amsterdam (1989).
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editor Yeon June Kang
Shuai Wang received his B.S. degree (2013) from Changchun University of Science and Technology. He is currently a Ph.D. candidate at the School of Mechanical Science and Engineering at Jilin University. His major area is modern mechanical design theory and method.
Rights and permissions
About this article

Cite this article
Zhang, G., Liu, X., Wang, S. et al. Simulation of travelling performance and experimental research on heavy double crawlers on a soft ground. J Mech Sci Technol 31, 501–514 (2017). https://doi.org/10.1007/s12206-017-0103-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-017-0103-7