
Abstract
The introduction of new alloys and process improvements that promise increased material performance to the aerospace and defense industries is a long and costly venture due to ensuring flight safety by way of data analysis and field service. Changes to the supply chain require the use of a phased approach, typically technical readiness level (TRL), to reduce risk. The techniques in the TRL methodology include both physical simulation, such as demonstrators, and computational simulation within the Integrated Computational Materials Engineering (ICME) framework. The typical approach consists of designing a methodology using computational processing, conducting pilot-scale trials, and using a TRL approach for scaling the technology. A balanced combination of physical and numerical simulations aids in understanding the role of metalworking processes in microstructure and property development. This in turn ensures the development of new and improved products in an accelerated manner. This paper reviews simulation methods, both computational and physical, available in the metals industry and discusses examples of how the use has accelerated deployment of new products.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
To ensure both process robustness and flight safety, new alloys and process improvements in the aerospace and defense industries are generally long and costly ventures. Changes to the supply chains incorporate a phased or technical readiness level (TRL) approach, which reduces uncertainty of a product’s service readiness. Included in this TRL approach can be both numerical and physical simulations, the former widespread and the latter still used in systems like aerodynamic wind tunnels. Physical simulations of metalworking processes have decreased over the past decades with a concomitant increase in the use of computational modeling. A balanced combination of physical and computational simulation processes in understanding metalworking and its role in microstructure and property development is critical to ensure swift development of new and improved products.
TRLs were adopted across the aerospace industry after NASA first documented it as a tool in 1989,1 and expanded when ISO 162902 was published in 2013 to standardize it for space hardware. Similar tools, such as tool maturity levels, are more focused on modeling tools and the integrated computational materials engineering (ICME) approach. In all such scales, the most lagging evaluation sets the base assessment level for the program.
TRL is typically described on a 1–9 scale, with 1 representing a new idea with only basic principles observed, and 9 having demonstrated flight worthiness through successful missions. For material providers who produce metal products, like sheet, billet, bar, and plate, the development work for a new material or process occurs in TRL 1–5.
Advanced materials companies such as ATI routinely employ both physical and computational simulation to determine the viability of concepts and theories at low TRL levels. The priorities for developing new products and processes are determined based on customer need. The use of a judicious mix of subscale physical trials (models) and computational modeling can greatly accelerate the development cycle, as compared with using either computational or physical modeling alone.
In the aerospace industry, it is not uncommon for new alloys to take 5–15 years to be introduced into service. A good example is gamma-TiAl, which was first examined by McAndrew and Kessler in 1956,3 and was only first flight-qualified in 2007 in the GEnx engine.4 This long delay was due primarily to poor room-temperature ductility. A more typical customer-driven example was the introduction of Ti-5Al-5Mo-5V-3Cr-0.5Fe (Ti-5553), which was publicly introduced in 19975 and was first used on the 787 Dreamliner in 2009.6 The 12-year development period was despite Ti-5553 being a derivative of VT-22, an older Russian alloy. A more recent example is that of the engine disc alloy, René 65 (based on the older GE alloy René 88), where it took the GE-ATI team only about 5 years from TRL 1 to insertion in service.
This paper will review simulation methods, both computational and physical, available in the metals industry and discuss examples of how their use can accelerate deployment of new products.
Methods of Physical Simulation
The use of physical simulation has a long history in the field of materials science. It pre-dates the widespread use of numerical methods, such as computational fluid dynamics (CFD) and finite element analysis (FEA), and continues to be a relevant tool to this day.
Physical simulations can range in size from laboratory to full scale. The definition of size scales depends greatly upon the industry being served. Laboratory-scale physical simulations often involve micro-compression or tensile frames and arc melting button furnaces, which are quick ways to test new compositions or the impact of process changes.
Among metals producers in the aerospace supply chain, a pilot plant may be used to physically simulate almost every full-scale process step. This includes melting, remelting, open-die forging, rolling, and extrusion. For powder-based materials, additional processing steps are needed, such as atomization, sieving or screening, blending, and consolidation. Typical equipment for each of these steps is shown below by process.
Melt
Primary melting can be accomplished in air, under a protective atmosphere or under vacuum conditions. Laboratory-scale button melting furnaces produce 1–5 lb. (0.5–2.25 kg), and pilot-scale melting furnaces typically melt between 50 and 500 lb. (23,230 kg) of material. A pilot-scale vacuum induction melting furnace is shown in Fig. 1.

Pilot-scale vacuum induction melting furnace. Courtesy ATI Specialty Materials.
Remelt
The ingot from a primary melt process (such as VIM) is usually remelted to remove unwanted contamination such as trace elements and inclusions. Remelting may be accomplished either under a vacuum (vacuum arc remelting; VAR), under a protective slag (electroslag remelting; ESR) or both. These processes use the ingot cast in a prior process as a consumable electrode for the remelt process. A pilot-scale VAR furnace is shown in Fig. 2.

Pilot-scale vacuum arc remelt furnace. Courtesy ATI Specialty Materials.
Press
Pilot-scale open die presses are commonly used to perform upset forging to evaluate workability and refine microstructure, as well as to simulate multiple hit/multiple reheat billet conversion (cogging) processes. The aerospace community employs forge presses with load capacities between 100 and 1000 tons (91 and 917 metric tonnes), which range in sophistication from hand-operated presses to those that are computer-controlled with automated data acquisition. Figure 3 shows an example of such a press.

Pilot-scale 1000-ton (907-metric tonne) forging press. Courtesy ATI Specialty Materials.
Rolling
Benchtop scale bar rolling simulation, using small-scale rolls and colored modeling clay or soft metals, can be operated with a hand-crank. Concentric layers of differing model clay colors allow direct measurement of deformations, and calculations of strains.
Pilot-scale rolling mills with either a two-high or four-high configuration are used to evaluate workability. The equipment is sized to accept input up of approximately 2 × 2 × 4 in. (width, thickness, length) in. (50 × 50 × 100 mm). Like forge presses, the equipment ranges from completely manual to fully automated and instrumented.
Extrusion
Pilot-scale extrusion presses are less common and have been used to develop new materials and to understand the effects of die geometry upon die wear and strain distributions with round or shaped workpieces.
Small-scale simulation of extruded rounds, approximately 2-in. (c.50-mm) diameter, have been conducted in order to physically predict strain fields. To map the strain, billets are cut longitudinally to half-circle cross-sections, marked along the midplane with a grid, and either co-extruded or extruded in a half-circle shape with the planar face aligned with the grid on the entering material. After extrusion, the shape of the grid is used to reveal the strain patterns within the material.
Atomization
Atomization at pilot-scale is a difficult process to model physically, primarily due to size-scale effects during solidification. The size of these installations depends upon the material and industry; nickel base superalloys typically have pilot-scale atomization units capable of producing 2–200 lb (1–100 kg) of powder per run. Pilot-scale can use full-scale atomizing nozzles with smaller melt and atomization chambers. These units often have high-speed photography through viewports to characterize the atomization process and the impact of process parameters on the powder produced. Figure 4 shows a pilot-scale atomization unit. Powder handling can also be simulated, including screening/sieving, blending, and container loading technology.

Atomization unit and cooling tower.
Gas atomization of metal is another example where the kinematic similarity of water to molten metal makes it a particularly adept material substitute. As we will see later, it also makes an excellent material substitute for other metallic liquid processes, such as water modeling of tundishes.
Atomization with water benches consists of an atomization head unit installed in a transparent plastic enclosure using air as the atomizing gas. High-speed photography is used to record the shape of the atomization plume as well as the characteristics of the formed water droplets, which makes it very good for studying the atomization process though not droplet solidification. Low melting point materials can be used for the latter, and while significantly easier to handle than other metals, they still require significantly more sophisticated equipment than the water due to maintaining a constant temperature supply of liquid material.
Hot Isostatic Pressing (HIP)
Small-scale hot isostatic pressing is common among both industry and academia given the importance of the technology in any powder-processed material, including additive manufacturing. Pilot-scale vessels as shown in Fig. 5 often have abilities that can exceed production vessels, including both higher temperatures and pressures, which allow for greater process exploration than at full-scale. This performance is afforded by their small scale and thick walls, with interior volumes less than 732 in3. (12 L).

Laboratory-scale hot isostatic press unit. Courtesy of The Ohio State University, Center for the accelerated maturation of materials (CAMM); (https://camm.osu.edu/facilities/processing/aip-hot-isostatic-press).
Methods of Numerical Simulation
Physical phenomena occur at various length scales (from atomistic to galactic). In the application of modeling it is important to couple numerical simulation to physical modeling in order to ensure similitude and to validate the results. In constructing numerical models to describe physical phenomena, one typically follows a set procedure:
-
1.
Description of the Physics The fundamental premise is that the situation to be simulated is adequately described by mathematical equations, i.e., all the relevant physics is captured. Such a description (the governing equations with well-defined initial and/or boundary conditions) is usually too complicated for closed-form solutions, especially if the different phenomena are “coupled”, i.e., there is one-way or two-way exchange of information between the equations governing the different physical phenomena; (for example, in hot working of metals, the mechanical response of the workpiece to external forces is dependent upon the temperature field). Hence the need for numerical solutions.
-
2.
Discretization methods The goal of this is to approximate the continuum solution for the governing equations through a series of simplified (often linear) localized solutions at discrete locations throughout the global domain, such that these local solutions are consistent (error diminishes with reducing scale of discretization) and conservative (conservation laws not violated). Examples of discretization methods include the finite difference, finite volume, and finite element methods. The discretization results in a large set of simultaneous algebraic equations that need to be solved for the primary variables of interest.
-
3.
Solution Algorithms The solution of these simultaneous equations must be quick (fast turnaround), efficient (minimal computing resources), stable, convergent, and accurate.
-
4.
Interpretation of Results A ‘reality check’ is required, to ensure a proper interpretation of the results to provide the effects that are being sought (i.e., the solution of the governing equations).
In the field of alloy development and characterization, CALculation of PHAse Diagram (or CALPHAD) techniques have been used for several years now to aid in the rapid development of new alloy compositions with specific properties and enhancements.7 We are focusing on numerical modeling of processes at the macro-scale (~ 1 m), which de-emphasizes compositional modeling relative to other methods.
The Finite Difference Method: This method is the oldest discretization technique. It uses the governing equations in the differential form. It is based in using the Taylor series expansion of the function to be solved to obtain approximations to the derivatives of the function. This approximation is applied locally (grid point), and the solution over the entire domain of interest (spatial and/or temporal) can be approximated by considering an appropriate number of regularly spaced ‘discrete’ locations. This simplifies the differential equation to a set of algebraic equations that can be solved to obtain an approximate solution. The advantage of this technique is its simplicity; its disadvantage is that it does not handle complex geometries well.
The Finite Volume Method: This technique which originated in the fluid mechanics community considers the governing equations in integral form. The entire domain of interest is divided into well-defined non-overlapping regions (control volumes) with an interior grid point associated with each control volume. Piecewise functions are used to approximate the behavior of the primary variables between grid points, and are such that the conservation principles are obeyed within each control volume. This automatically ensures that the conservation principles are enforced over the entire domain of interest. This is the primary advantage of this approach, in addition to its simplicity of formulation. Since the control volumes are regular, discretization of complex geometries is a challenge.
The Finite Element Method: In this method, the domain of interest is sub-divided into a collection of non-overlapping geometric shapes; the ‘finite elements.’ Piecewise functions are used to describe the behavior of the primary variables within each element, and the governing equations formulated for each element using the approximate functions. The primary advantage of the technique is the ability to handle complex geometries, as well as the ability to use techniques such as adaptive mesh refinement (locally finer meshing and/or higher order interpolations). The disadvantage of the finite element method is that the formulation and implementation are complicated.
Since the early 1970s, several commercial numerical packages have been in use to perform the discretization and solution steps listed above. CFD codes, such as ANSYS-Fluent™ and COMPACT/MeltFlow™, are based on the control volume approach, while the solid mechanics codes, such as Abaqus™ and DEFORM®, have chosen the FEA approach.
In the aerospace industry, the use of numeric models that have been validated with advanced characterization and physical models provides a key link to production scale. No matter the approach, a key aspect of such solutions was noted by Bertram et al.8, in the context of modeling the VAR process:
To a degree hard to overstate, most of the problem definition is contained in … boundary conditions.
Example Cases of Integrated Modeling
The integration of physical modeling along with computational modeling results in a greater refinement of both models, a deeper understanding of the physical systems and boundary conditions, and often a unique combination of speed and accuracy unparalleled by either singular technique. The following are examples where both efforts were used in combination to great success.
Case 1: Development of Extruded Titanium Shapes
Structural members of airframes can be made by a variety of methods, ranging from machining from mill products such as plate or forgings, to extruding complex shapes. The cost ranges are based on the efficiency, or the “buy to fly” ratio, of manufacturing the part from each method. Extruding shapes rather than machining from blocks often results in a lower installed cost.
Designing tooling for extruded titanium shapes is a challenging, iterative process given the high strain rates, thermal gradients, and large plastic strains involved. The time and cost of developing these shapes is reduced through computational and/or physical modeling. ATI has manufactured extruded titanium shapes and used finite element modeling to generate and digitally assess die designs. The digital design process also enabled machine shops to automatically design machining and inspection paths for the extrusion dies.
Non-axisymmetric, 3-D finite element modeling was implemented to design extrusion tooling with reasonable computational times: less than 24 hours between iterations. A computational process was designed for dimensional tolerances and incorporated the billet’s strain rates, adiabatic heating, and exit velocity. To validate the method, five shapes were designed and extruded both at full-scale and pilot-scale. The subscale designs were selected using both ‘linear’ and ‘non-linear’ approaches and extruded at the Technical University of Berlin with 125-mm-diameter titanium billets at 2000 °F (1094 °C) at 45 mm/s with a glass lubricant, as shown in Fig. 6. Following this, the extrusions were cooled (6), conditioned, and laser-scanned. The scans were compared to full-scale extrusions which were conducted simultaneously and also scanned.

Pilot-scale extruded L-shapes: left non-linear die-scaling, and right linear-scaling methods.
Comparisons to pilot-sized extruded shapes were very good. As shown in Table I, the non-linear scaling of die designs was slightly more accurate than the linear-scaling method, and most dimensions on the pilot-scale extrusions fell within 3–5% of their intended size. From this, it became obvious that the combination of finite element modeling along with pilot-scale testing would save significant development costs and time compared with full-scale trial and error.
Case 2: Scale-up Simulation of Powder Alloys
Numerical modeling has been a major factor of the speed and efficiency in the development of nickel-base powder metal superalloy processing. The process models provide key insights into HIP parameters, powder container design, and deformation steps.
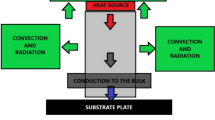
During HIP, a steel container encapsulates the nickel alloy powder, creating both an interface for creep-based consolidation under hydrostatic pressure and an interface with vastly different yield strength and density than the material within. As indicated in Fig. 7, thermal history is location-dependent, so computational simulation is necessary to understand the temperature profile of the full-scale powder compact and how to replicate the behavior on the subscale. This demonstrates the synergies of numeric and physical simulations.

Models for heat transfer during HIP become important factors in defining subscale physical models.
Integration of the subscale activities into production-scale processes are important validation steps. As indicated in the powder development activity on an advanced nickel-base superalloy, the process simulation applied to full-scale effectively predicted loading within 5% of actual (Fig. 8).

The model simulation related well with the actual upset billet.
Once the physical and numerical modeling is complete, the entire package provides insight into setting up the full-scale production manufacturing route. As indicated in Fig. 9, full-scale superalloy powder billets have been successfully produced from some of the most complex and advanced nickel-base superalloys.

(a) Final forging of full-scale 10 in. (254 mm)-diameter nickel superalloy billet; (b) uniform fine grain (ASTM 13).
Case 3: Understanding Pool Stirring
Vacuum arc remelting is the crucial final step for the manufacture of both superalloy and titanium ingots used in aerospace applications. Figure 10 shows a schematic of the VAR furnace, and Table II compares the nominal melt practice for a superalloy such as alloy 718 with Ti-6Al-4V. The key difference in VAR practices is the use of magnetic steering coils in the case of titanium melting. A square-wave DC-current solenoidal magnetic field is applied to the process to control arc motion (arc-steering), which helps to contain the plasma arc under the shadow of the electrode. Typically, the current in the solenoid is periodically reversed so that the field direction in the furnace alternates up and down along the ingot axis. In addition to its effect on the arc, the reversing magnetic field also induces melt pool stirring. The reversal of the stirring field induces a periodic rotation/counter rotation of the pool, analogous to a washing machine. The exact impact of this pool stirring on the pool depth has been studied using CFD models, and the results from various models have differed enough that no conclusions could be drawn. The melting of pilot-scale VAR ingots offers a convenient and low-cost alternative means of answering this question during alloy development.

Left Schematic of VAR furnace, right schematic of melting titanium and superalloy in production compared with pilot plant.
For this study, 6-in. (150-mm)-diameter electrodes of alloy 718 were VAR-melted into 8-in. (200-mm)diameter crucibles using a melt current of 3000 A. In each case, the steady-state pool was marked just prior to turning off the power at the end of the melt. The pool was marked by inserting about 0.5 lb. (227 g) of tungsten bits into the electrode, which entered the melt pool as the electrode melted up to the location of the tungsten. The tungsten dispersed and marked the bottom of the pool because it sinks due to its higher density. Ingots were manufactured for three conditions:
-
No stirring.
-
Stirring with field strength of 45 G, with field reversing every 7 s.
-
Stirring with field strength of 45 G, with field reversing every 59 s.
After VAR, the ingots were sectioned longitudinally and etched to reveal the macrostructure of the entire ingot. Figure 11 illustrates the results of these trials in terms of the VAR pool depth and macrostructure. The left ingot in Fig. 11 is the unstirred ingot, the pool depth is 5.5 in. (140 mm), and the macrostructure is typical of the VAR ingot with columnar grains growing perpendicular to the liquid pool. The middle ingot in Fig. 11 is the stirred ingot with a 7-s reversal time, and both pool and structure are similar to the unstirred ingot with no appreciable change in the measured pool depth (5.6 in. or 142 mm); however, the shape of the pool is more conical, with straighter side walls. The third ingot was stirred with a 59-s reversal and shows more distinct differences in having a 25% deeper pool (6.9 in. or 175 mm), and a macrostructure showing a distinct banding pattern, the periodicity of which corresponds to the reversal frequency of the stirring field.

Results of pool marking trials for 8 in. (200 mm) diameter. Pilot-scale vacuum-arc remelted ingots. The ingot on the left was not stirred; the ingot in the middle was stirred with a field reversal of 7 s; the ingot on the right was stirred with a field reversal of 59 s. In each case, the dotted lines depict the melt pool.
The differences in pool configuration may be explained as follows. In the case of the unstirred ingot, there is no appreciable flow in the azimuthal direction. In the middle case, with the fast reversal of 7 s, the azimuthal velocity field is just establishing at the instant of reversal, as inferred by the straighter side walls. In the case of the third ingot, a slow reversal time of 59 s provides enough time for the azimuthal velocity field to fully establish, resulting in enough motion to significantly deepen the pool before reversal. The results also provide a cautionary lesson about the need for numerical models to incorporate all the relevant physics, as well as well-defined boundary conditions, as a plausible explanation for the differing results from various CFD models alluded to earlier.
Case 4: Evaluation of Ti Ingot Conversion
Open die forging is the most common method of refining cast grain structures of ingots into a suitable fine-grain structure as input for other operations or final product—the so-called cast-wrought process. In the aerospace industry, the forging process has near-limitless combinations of process parameters which are optimized for performance, cost, and throughput, given the multiple thermomechanical cycles involved for every product, as illustrated in Fig. 12. Integration of subscale physical models with computational models shortens the optimization cycle; an example is the refinement optimization of Ti-6Al-4V microstructure from a nominal 36 in. (915 mm) diameter ingot to a 10 in. (255 mm) diameter billet, which was modeled as individual upset and draw forging steps at pilot-scale. Once the desired microstructure was achieved at a 3 1/8 in. (80 mm) diameter billet in the subscale physical model (Fig. 13), that process was analyzed using commercially available FEA software (Fig. 14), and the full-scale process was then developed with the pilot-scale digital and physical models as guides. By mapping each thermo-mechanical subscale step to a full-scale step with equivalent output state variables in the computational model, the model was validated and the optimization process was achieved with a single full-scale trial, demonstrating equivalence between the subscale and full-scale microstructure (Fig. 15).

Representative thermo-mechanical process map for Ti-6Al-4V demonstrating the four major process cycles and their input controls, including: duration, temperature, heat-up rate, cool-down rate and deformation orientation (upset in z-axis or draw in the x-axis.

Pilot-scale cogging of a Ti-6Al-4V billet at 140 mm diameter on a 1000-ton (907-metric tonne) hydraulic press, and the resulting microstructure revealed by Kroll’s etchant.

The effective strain distribution of a 130-mm-diameter billet longitudinal cross-section after subscale thermo-mechanical processing as simulated by the cogging model available in DEFORM-3D®.

Full-scale cogging of a Ti-6Al-4V ingot of 915 mm diameter on a 10,000-ton (9070-metric tonne) hydraulic press, and resultant longitudinal microstructure revealed along the centerline with Kroll’s etchant.
Case 5: Simulation of Liquid Metal Flow
Metal cleanliness is critical to material performance, such as fatigue resistance and improved safety. Pilot-scale tundish simulations can use water as a model material to physically simulate fluid dynamics and are common in the steel industry. These simulations can help to ensure metal cleanliness across alloy systems, through inclusion entrapment by establishing latency times for fluid flow that ensures adequacy of density-based separation. This aids in the optimization of dams and weirs in full-scale installations. Pilot-scale can consist of 10–50% the size of full-scale installations, and the Froude number ensures dynamic similarity.9 Dyes can typically track fluid flow, and gelatin capsules can simulate inclusions. Construction from transparent plastics allows the recording of results using video cameras, as shown in Fig. 16, where the water model in combination with an air jet was used to simulate the flow of liquid titanium and the trajectories of inclusion particles in the hearth of a plasma arc cold hearth furnace.10 Particle counters on the exiting product can provide insight into the effectiveness of various weir and dam configurations.

Water model for the physical simulation of molten metal flow through a tundish or hearth.
Case 6: Process Development of René 65
Powder metal superalloys have made significant advances into the turbine sections of both military and commercial propulsion engines. As a result, conventional melted (VIM + VAR or VIM + ESR + VAR) alloys such as ATI 718™, and ATI 720™ grades are being replaced with powder alloys, René 88, René 104 and RR1000. Phase stability modeling and compositional adjustments can be analyzed to reduce the sensitivity to solidification segregation or enable greater recyclability of these or other nickel-based superalloys.
René 65 was developed as a derivative from René 88DT, and features higher iron content and controlled carbon and nitrogen to assist in recycling. These advanced alloys have a high propensity for cracking (Fig. 17), and their processing can be optimized using computational models in combination with pilot-scale physical simulations. To accomplish this in René 65, subscale ingots were press-converted through initial hotworking operations, and the final microstructure was generated using roll deformation.

Dwell time and reduction were identified as critical parameters using subscale deformation modeling and experimental testing.
Through combined models, the cracking can be linked to strain and temperature distributions. Like in the titanium case presented, iterative modeling physically and computationally allows for better model refinement and sooner product offerings (Figs. 18, 19). Rolling operations were performed on the subscale billets after press conversion, and demonstrated refined, uniform grain size (Fig. 20).

Subscale macrostructural response can be used to refine model parameters prior to moving into full-scale development. The finite element map on the left plots effective strain, which is also observed with the macrostructure after etching.

Refined macrostructure and microstructure through pilot conversion.

Samples obtained from the bar ends exhibited a uniform macrostructure and microstructure.
With the use of integrated subscale equipment and numerical modelling, process conditions to increase scaling from a 1¼-in. (32-mm) bar to a 10-in. (250-mm)-diameter billet can be accomplished with a significantly shorter development cycle for new alloys. In the case of René 65, it permitted the tailoring of the composition of an existing powder alloy, René 88, and the modification of the process route for ingot metallurgy processing to provide a lower cost alternative for advanced aeroengines.
Conclusion
Integrated computational materials engineering most commonly refers to the joining of computational models at various length scales or levels of complexity. The combination of numerical and physical simulation is another example of how the ICME philosophy can be applied, and which has been shown to be potent in reducing both the time and the expense of the development of new or improved materials and processes. This combination allows the reduction of development iterations, leading to accelerated entry into the market of both titanium- and nickel-base alloy systems. For commercial alloy systems, the development cycle has been reduced by up to 5 years. Ultimately, the timely introduction of new materials and processing improvements contributes significantly to airline safety, improved defense capabilities, and improved economic performance of the aerospace sector as a whole. Aerospace industry trends include a continued focus on safety and cost, and therefore ICME approaches will remain in the forefront in the efforts to improve materials.
References
S.R. Sadin, F.P. Povinelli, and R. Rosen, Acta Astronaut. 20, 73 (1989).
International Organization for Standardization, ISO 16290:2013 (2013).
J.B. McAndrew and H.D. Kessler, J. Met. 8, 1348 (1956).
N. Bewlay and W. Suzuki, Mater. High Temp. 33, 549 (2016).
J.C. Fanning, R.R. Boyer, Proceedings of the 10th World Conference on Titanium (2003), pp. 2643–2650 .
Boeing 787 Dreaminer completes first flight (2009), https://boeing.mediaroom.com/2009-12-15-Boeing-787-Dreamliner-Completes-First-Flight#:~:text=SEATTLE%2C%20Dec.,Paine%20Field%20in%20Everett%2C%20Wash. Accessed 15 July 2020.
U.R. Kattner, Tecnol. Metal. Mater. Min. 13, 3 (2016).
L.A. Bertram, C.B. Adasczik, D.G. Evans, R.S. Minisandram, P.A. Sackinger, D.D. Wegman, R.L. Williamson, Proceedings of Liquid Metal Processing and Casting Conference (1997), pp. 110–132.
S. Chang, Z. Liangcai, and Z. Zongshu, ISIJ Int. 55, 837 (2015).
X. Huang, J.S. Chou, D.J. Tilly, K.O. Yu, Proceedings of Liquid Metal Processing & Casting Conference (1997), pp. 179–203.
Acknowledgements
We would like to particularly thank and acknowledge the great and long-lasting contributions made by S. Lee Semiatin and Wei-Tsu Wu over the course of their long careers. Both have made well-known and significant contributions to the combined use of physical and computational simulation.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Antolovich, B.F., Banik, A., Foltz, J.W. et al. Development of Aerospace Materials Using Integrated Numerical and Physical Simulation. JOM 72, 3570–3581 (2020). https://doi.org/10.1007/s11837-020-04319-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11837-020-04319-w