
Abstract
This review article presents prior studies on controlling shape and stress in flexible structures. The study offers a comprehensive survey of literature concerning the adjustment and regulation of shape, stress, or both in structures and emphasizes such control’s importance. The control of systems is classified into three primary classes: nodal movement control, axial force control, and controlling the two classes concurrently. Each class is thoroughly assessed, showcasing diverse methods anticipated by various scholars. Furthermore, the paper discusses methods to reduce the number of devices (actuators) to adjust and optimize actuators’ placement to achieve optimal structural control, considering the cost implications of numerous actuators. Additionally, various actuators are presented in detail, their advantages and disadvantages are also discussed. Moreover, the applications of the presented techniques are reviewed in detail, the essential recommendations for future work are also suggested.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Shape and/or control of structures is crucial in modern engineering, allowing for the creation of innovative and efficient designs across various fields. The capacity to actively manipulate and adjust structures’ shape and/or stress provides unparalleled performance, durability, and safety advantages. Recent progress in materials science and intelligent systems has transformed shape control, leading to exciting applications in aerospace, civil engineering, robotics, and biomedicine. An adjustment involves minor modifications or movements to enhance performance or achieve a desired result. Shape control minimizes or eliminates structural deformation from external disruptions [1]. Consequently, specific structures are intentionally designed with the ability to alter their shapes by adjusting the lengths of components or applying forces to them [2]. Varying bar lengths cause stress changes in indeterminate structures. Thus, internal forces should also be considered.
Structural engineering achieves control or adjustment of structures through altering the length of some bars. These length changings are made possible using embedded devices known as actuators, which produce the necessary length changes [3]. To achieve precise shape control, the devices must be able to lengthen and shorten. “Adjustment” refers to minor joint displacements or axial force changes to achieve the targets. The terms control and adjustment can be used interchangeably in this context. Although the concept of length changing causing changes in shape is straightforward, research on analytical and numerical techniques is limited, especially regarding direct approaches. Former studies in this field can be categorized into three main groups: nodal movement, axial force, and both cases control together.
Thus far, only a few review articles are available in the field of structural shape control; for example, two reviews were conducted in 1999 by Sunar and Rao [4], and in 2002 by Irschik [5], the reviews were dedicated for the studies used piezoelectric actuators. This paper covers the research conducted on shape and/or stress control of structures to date. It also covers the studies about several types of actuators and the research about optimization in the number of actuators and their optimal locations. It’s crucial to underscore that for this study, the literature review was conducted using the highly reputable Web of Science database. This database was chosen for its comprehensive coverage and rigorous selection process, ensuring the inclusion of only high-quality research. The review focused on the latest advancements in shape and stress control, as well as actuator technologies, specifically for structural applications. To ensure a thorough and comprehensive collection of relevant research, a search strategy combining titles, topics, and keywords was employed. The main key terms used in the search were “shape control”, “displacement control”, “stress control”, “actuators”, and “structures,“.
2 Structural Control
2.1 Shape Control
In structural engineering, the configuration of flexible structures holds great importance. Typically, their structural geometry is defined by nodal positions; these structures often support sensitive equipment used in scientific or communication applications, necessitating high geometric accuracy for optimal performance, especially in exacting situations like space [6,7,8,9]. The structures in space are intended to be lightweight, leading to high flexibility and shape imperfections from various factors such as manufacturing errors, thermal distortion, and transportation loading. Thus, adjusting these structures with appropriate corrections is crucial to maintain accuracy [10, 11]. The concept of reshaping was initially presented by Weeks [12, 13], Who provided explanations for methods concerning the determination and management of static shapes in extensive space systems. Mitigation of static distortion by applying temperature was then developed analytically [14] and computationally [1].
The primary objective of reshaping is to diminish the influence of exterior disturbances on the distortion of the structure through suitable elongation [5, 14]. In cases where shape distortion is undesirable, adjustments to nodal positions are necessary for reshaping, which is done by altering the length of some bars [15, 16]. Shape control is closely related to control engineering and is a branch of structural engineering; an example of shape restoration is illustrated in Fig. 1. One approach to effectively control external displacement is to adjust the length of active members; identifying active bars and determining the required size of actuation for those bars is essential. Researchers like Korkmaz [17] have addressed this issue in several studies on structural control. Additionally, static shape adjustment approaches were studied by Burdisso and Haftka [18], and Ziegler [1].

Reshaping a structure after deformation due to external loading adapted from Saeed, Manguri [19]
Over time, more researchers have explored various approaches to shape control. Indirect methods, like Subramanian and Mohan’s successive peak error correction algorithm [20], have proven economical and practical for correcting shape deformation; further improvements were made to the algorithm by Skelton and DeLorenzo [21]. Yoon [22] used finite element analysis (FEA) to control the shape of adaptive one-dimensional structures for performance optimization, and Salama, Umland [23] employed simulated annealing with FEA for controlling a truss system. In another study, piezoelectric sensor distribution was implemented for shape control for intelligent structures based on FEA [24]. In addition, shape-controlling methods have been derived, considering curvatures and slopes as fine-tuning criteria [25, 26] and eigenstrain actuation [27].
Concerning direct methods, Mitsugi, Yasaka [28] studied the direct method of using the generalized inverse of a Jacobian matrix to determine inputs for shape control pertaining to cable length variations. In addition, a direct method based on Maysel’s formula was proposed by Nyashin, Lokhov [29] for nodal displacement control of trusses. The surface accuracy method for cable mesh reflectors was presented by Tanaka and Natori [30]. An effective method to control the shape of flexible structures was proposed based on the linear force method [31] and then coupled with optimization algorithms [32]. Tanaka [33] developed the “surface adjustment mechanisms” method, an innovative approach for resembling and correcting the surface deformation of an antenna. This approach creates connections between surface errors in antennas and the resulting alterations in antenna gains caused by deliberate deformations, allowing for correction following the assessment of the initial deformation of the antenna surface based on signal gain impacts resulting from implemented modifications. Tanaka [33] also determined that this method reduced calculation costs and improved applicability. Furthermore, the deformed cantilevers’ shape was controlled by employing Timoshenko beam coupling with strain actuation theory using piezoelectric [34] and laminated piezoelectric [35]. Du, Zong [16] suggested an optimization-driven method for modifying the shape of structures.
Regarding shape-controlling applications, it has been utilized in various structures to address shape distortion issues. For instance, Senatore, Duffour [36] conducted intensive studies on adaptive trusses, Yang and Ngoi [37] focused on controlling a beam’s shape using piezoelectric. They derived a solution for beam deflection that considered the actuation of piezoelectric and external forces. Although they presented case studies demonstrating the potential of analytical solutions for shape control, they also acknowledged that achieving the desired shape was challenging due to limited actuation [37]. Burdisso and Haftka [18] stated the efficient analysis of shape distortion statistics in antenna structures. For cable mesh antenna reflector surfaces, precise adjustments are required to achieve enhanced amplification or focused signal directionality, enabling the minimizing of ground terminals or capture of faint signals through the alteration of cable length [16]. In addition, the distorted shapes of cable mesh antenna [28, 30, 33, 38,39,40,41,42,43,44] for prestressed cable structures [31, 45,46,47] and plate wings [48] were restored. Trak and Melosh [49] also explored shape control of deployable cable net reflectors based on self-equilibrated stresses, achieving shape control without iteration. They studied the manipulation of a truss’s shape by adjusting nodal coordinates to counteract deformation, demonstrating that minor changes in the truss’s geometry did not significantly impact the determinate truss bar forces. Further numerical applications of shape control theories were allied to a single-layer egg structure [19] double-layer domes [50, 51].
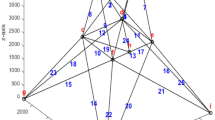
The number of studies that have been conducted for shape controlling in the disciplines of civil, mechanical and aerospace engineering from 2010 to 2023 are shown in Fig. 2. A formulation was developed by You [52] for nodal movement control of a prestressable pin-jointed assembly presented in Fig. 3. He was interested in prestressing effects and he didn’t put the effect of external loading into account.
Where ds is the displacements at nodes resulting from the adjustment of displacements, E is the matrix that relates external nodal movement and actuation, and eos is the actuation applied to modify the shape.
Then, it was further developed by insetting external loading effects [11]
Where dp and dt are nodal displacements due to loading and targeted ones, respectively.
After that, the method was progressed by giving the desired displacement in a domain and involving optimization algorithms [10].
Equation (3) is subjected to the optimization function below to minimize the sum of the total actuation and eliminate the actuators out of the domain of [Lb and Ub], which are lower bound and upper bounds, respectively.

Number of studies were conducted from 2010–2023
2.2 Stress Control
Specific structures may require more attention to controlling the internal forces within their members rather than focusing solely on displacements or deformations. An example is seen in systems containing cable members that may become slack under specific loads, necessitating tightening to maintain their structural integrity [53]. Conversely, slender struts may face instability due to buckling failure requiring reduced compressive force [54,55,56].

A 2D pretensioned cable structure You [52]
It is essential to note that bar length actuation impacts axial force only in structures with a high degree of indeterminacy. This discussion centers around controlling axial forces in specific structural members to prevent structural failure caused by over- or under-stressing due to loading. While the study of internal force control in structures is limited, some related works have been reviewed and summarized in this section, mainly focusing on the broader concept of prestressing in structures. Prestressing, strictly speaking, is typically applied to indeterminate structures. However, all structures experience some degree of “pre-stressing” owing to their deadweight. Enormous space systems, often indeterminate, can be specifically prestressed to reduce overall weight. This is achieved by adjusting the internal forces to be more tensile-dominant, thereby decreasing the reliance on bulky compression struts and enabling the structure to span more considerable distances [57].
The prestressing technique directly involves the length actuation of structural members. Kwan and Pellegrino [58] discussed methods for calculating length actuation before applying the load; the aim is to attain a particular prestress arrangement using the force method (FM). The researchers also investigated finding the best locations for actuators that apply prestress to pin-jointed trusses and the most effective actuator adjustments for improving an existing, incorrect prestress state. Roth and McCarthy [59] proposed a method coupled with a genetic algorithm; the technique suggests pretension on the tensegrity structures so that the compression members can resist six times more than before prestressing. Another approach to controlling forces in prestressed systems is pre-tensioning the bars to an anticipated amount [60]. The process to analyzing the pre-tension in a prestressable space structure relied on linear superposition. The computational outcomes demonstrated the approach’s correctness, reliability, and effectiveness, making it appropriate for analyzing prestressable networks.
In different studies, stress has been controlled and become a constraint in topology optimization studies using bi-directional evolutionary structural optimization (BESO) [61,62,63,64,65]. In addition, the influence of self-stress in tensegrity structures was studied theoretically and experimentally [66, 67]. Furthermore, Dai and Yu [68] developed a new method for creating shell openings that takes advantage of the powerful modeling capabilities of Grasshopper. This visual programming language is integrated with the Rhinoceros 3D software to control stress in designing shell structures. In addition, the Stress-Aware Optimal Actuator Placement (SOAP) framework is a novel approach to placing actuators on composite structures. SOAP considers the residual stresses generated in the structure when the actuators are activated, and it minimizes the residual stresses by optimizing the actuator placement [69]. Piezoelectric actuators nullify the axial force in members in a one-dimensional structure [70].
The applications of force control can be found in several structures like stress control on a Levy cable domes [71], adaptive cable domes [72]. In addition, prestressing has been done for several structures like cable-strut structures [73,74,75,76,77,78], cable domes [79, 80] tensegrity systems [81,82,83,84]. Studies conducted in force control or prestressing of cable or tensegrity structures between 2010 and 2023 are presented in the line graph in Fig. 4.
2.3 Shape and Stress Control Simultaneously
In practical applications, it can be challenging to manipulate a sole inconstant without affecting other variables simultaneously. For instance, when restoring an antenna’s shape to a predefined target by adjusting specific member lengths, one must be careful not to cause dangerous levels of strut forces or slacken cables due to reduced internal force. This requires controlling nodal displacements and bar forces, which is typically challenging.

Research about force control or prestressing cable or tensegrity structures from 2010 to 2023
Limited research has been conducted on controlling both shape and internal forces. Kawaguchi, Hangai [85] explored an analytical approach using the linear force method to control the stress and shape of prestressable trusses. They validated their proposed method by comparing computational results with experimental findings on a pin-jointed tensile structure. The experiments focused on identifying difficulties related to controlling displacement components. Yuan, Liang [86] presented a study using a nonlinear force method to simultaneously control cable structures’ nodal displacements and axial forces. Another study by You [52] proposed a displacement control method for prestressed cable structures derived from FM and elastic deformations. The technique directly linked length adjustments and displacements in prestressed systems. The validation was done by comparing computational and experimental results on a preattentional 2D cable structure shown if Fig. 3. However, this method is limited to structures made of materials that exhibit linear elasticity and applies only to cases with small deformations. Similarly, Kawaguchi, Hangai [85] investigated stress and shape adjustment of prestressable trusses; they employed a straightforward analytical approach grounded in FM. However, they faced difficulties in confirming computational results by practical testing. Senatore and Reksowardojo [87] developed a study to control the force and displacement of adaptive structures with optimal actuators.
Innovative structures have the ability to adapt their configuration, damping, and stiffness, to environmental deviations [17]. The study found applications in space structures with a high level of precision, for example, reflectors. However, minimal damping, changing temperature status, and slackness in the joint can disturb these structures. Actuator control can help mitigate these effects. Sener, Utku [3] discussed shape adjustment in prestressable adaptive space pin-jointed assemblies to meet precision requirements for supported instruments. They emphasized the need for exact control methods as approximate methods were inadequate for achieving the required micrometer-level geometry control for precise measuring instruments upheld by flexible space trusses. Furthermore, a process of optimizing multiple objectives was presented using a genetic algorithm for shape control of a prestressed cable structure [88]. Wang, Li [46] argued that multi-objective optimization methods were unsuitable for cable structures that demand high surface precision. This is due to the low accuracy of the solutions obtained and the extensive computational burden associated with large and/or delicate pin-jointed systems. Such methods might lead to substantial misshape or extensive stress in members. To address this, an algorithm was suggested for member and joint exchange that could be used to find alternate arrangements of members and joints in truss structures that result in lower surface errors and axial forces [89].
Furthermore, an iterative procedure that combines the linear displacement control technique and the non-linear force method to control the shape of prestressed cable structures was presented by Xu and Luo [90]. The computational results indicated that the non-linear method agreed with the expected results, while the equivalent outcomes of the linear method showed significant discrepancies. The researchers concluded that the non-linear approach presents a marked improvement over the linear one, particularly when considering maintaining prestressing. Manguri, Saeed [55] proposed a technique based on FM and interior point algorithm through altering the length of some bars, nodal displacements, and axial force controlled; they also considered buckling in their work, the technique applied on several numerical examples see Fig. 5. In a different study, axial force and external nodal displacements of cables and trusses were simultaneously adjusted while the weight of the structures was optimized [91]; their technique was derived from FM and coupled with the interior point optimization algorithm. A linear method for shape and stress control was used to see the validity of the technique on a linear and geometrically non-linear structure [92].

A 2D prestressable truss [55]
3 Types of Actuators
An actuator is a device that uses a power source to create mechanical motion. They are used in various applications, including engineering, machinery, aerospace, industrial, and medical [93]. This paper discusses the most used actuators to control shape and stress in structures.
3.1 Mechanical Actuators (Turnbuckles)
The turnbuckle consists of two threaded eye bolts, one screwed into each end of a small metal frame, one with a left-hand thread and the other with a right-hand thread, as presented in Fig. 6. When the eye bolts are turned, they screw into each other, shortening or lengthening the turnbuckle. This changes the tension in the rope or cable threaded through the eye bolts [94, 95]. Researchers like Lee and Shin [96], and Olsson [97] developed novel types of turnbuckle with a regular cross-section. Shin and Lee [95] considered the flexural elements of a turnbuckle as beam-column components under the influence of both tensile force and moment; it becomes feasible to derive the relationship between load and displacement theoretically. Researchers used the mechanical actuator to change the force in members and/or relocation of joints [98, 99]. In addition, Turnbuckles were implemented to develop external post-tension in reinforced concrete beams [100,101,102].

A mechanical Actuator (turnbuckle)
3.2 Thermal Effect
Employing heating effects as an actuation technique can present a practical solution for mitigating static distortion in a big space system caused by its deformed shape. This method involves altering the temperature of the control elements. To ensure its effectiveness, choosing an active component with a high coefficient of thermal expansion is crucial.
Haftka and Adelman [14] conducted shape adjustment experiments on space structures utilizing heat as the actuation mechanism. Additionally, they conducted a study to anticipate and evaluate the impact of actuator inaccuracy on the shape adjustment process for delicate space systems, with the applied temperature serving as the actuation method [103]. Furthermore, Giusti, Mróz [104] described a method for designing thermomechanical actuators. The method uses topology optimization to maximize the output displacement of the actuator. Topology optimization is finding an object’s optimal shape by minimizing a cost function while satisfying constraints. In this case, the cost function is the output displacement, and the constraints are the mechanical and thermal equilibrium equations [105].
3.3 Piezoelectric
The utilization of piezoelectric actuators for shape control in flexible structures is an exciting application of piezoelectric materials [106]. These materials are the most commonly used intelligent materials for shaping systems. Irschik [5], and Sunar and Rao [4] have extensively discussed and reviewed the concept of shape control through piezoelectric actuation. Numerous researchers have applied piezoelectric actuators to control the shape of flexible structures. For example, Yang and Ngoi [37] and Hadjigeorgiou, Stavroulakis [34] used them to control the shape and identify damage in a beam and a cantilever composite beam, respectively. Additionally, Koconis, Kollar [107], Koconis, Kollar [108], Wang, Chen [24], and Chee, Tong [25], Chee, Tong [26] employed piezoelectric actuators for static shape control of intelligent structures.
A novel form of actuator called the laminated piezoelectric (LP) was applied by Yu, Zhang [35] to shape a cantilever beam. The LP consists of many piezoelectric patches with identical geometric and material parameters. Although Piezoelectric actuators are a valuable tool for shape adjustment, they have some drawbacks. They are highly sensitive to temperature variations, which can affect their performance. They produce relatively small displacements that may not meet the required range for certain applications. Additionally, their inherent nonlinear behavior necessitates complex computational techniques for accurate control. These drawbacks can be mitigated, but in some cases, it may be necessary to use a different type of actuator [109].
Wang, Qin [110] introduced a mathematical model focused on shape control of piezoelectric intelligent structures. The study utilizes a genetic algorithm to analyze optimal shape control outcomes for piezoelectric materials in a cantilever plate configuration, where both ends are subjected to specific loads. The analysis is conducted from various perspectives, such as precision reference or cost reference.
3.4 Shape Memory Alloy (SMA)
SMA is a comparatively recent and valuable material that has gained popularity owing to its exceptional characteristics, For example, considerable strength and an extended range of movement., compact size, and lightweight. Consequently, it has found increasing applications in various fields. One area of recent research involves using SMA for structural control purposes. Song, Ma [111] comprehensively reviewed SMA material applications in structural control. However, it is essential to acknowledge that Peng, Jiang [112] expressed concerns regarding SMA’s limited stability and controllability, posing challenges to achieving precise actuation. While SMA holds great promise for structural control, addressing the issues related to stability and controllability is crucial for ensuring accurate actuation. Further research in this domain is necessary to harness SMA’s potential in control applications fully.
4 Number of Actuators
Controlling a specific structure effectively requires an optimal number of actuators to address shape distortions and bar forces. Actuator numbers are needed contingent on the structure’s characteristics and the desired control over nodal displacements and axial forces. Research by Salama, Umland [23] suggests that adding more actuators leads to more accurate shape corrections. However, due to the high cost, there is a limitation of the actuators that can be used for adjusting and resolution. Thus, finding the ideal quantity of actuators for a specific problem is crucial. Haftka and Adelman [113] tackled the task of choosing a certain number of actuator positions (n) from a larger pool of available sites (m) to control the shape of large space structures statically.
Yuan and Yang [114] proposed a technique based on the singular value decomposition method to minimize actuators that adjust a sizeable deployable mesh reflector shape. In another study conducted by AlBahar, Kim [69] developed an SOAP framework to be more effective than conventional approaches in reducing deformation and residual stresses. It has also been shown to find the optimal solution with fewer actuators. Ali, Ghotbi [115] used Genetic Algorithm (GA) and sequential quadratic programming (SQP) to minimize the number of actuators to optimize the structural weight of a truss structure. Chanekar, Chopra [116] suggested a new approach for optimal actuator placement with several advantages over previous approaches. First, it can find the global optimal solution, which is the best possible solution to the problem. Second, it can be applied to both stable and unstable systems. Third, it does not require an initial controllable actuator combination, which makes it more flexible and easier to use. Other researchers like Chen, Jiang [117], Dhingra and Lee [118], and Du, Yue [119] investigated the optimal placement of actuators. Other studies have been conducted to minimize imbedded actuators for deformation control in several iterations in cable structures [120], and domes see Fig. 7 [121].

Minimizing actuator numbers in four iterations
Haftka [122] introduced the notion of “ideal actuators” to approximate the required quantity of actuators, reducing shape errors and evaluating their effectiveness in minimizing the truss bars members needing actuators. In another approach, Kincaid [123] utilized simulated annealing to achieve a near-optimal solution for the arrangement of actuators in assemblies with numerous members. Simulated annealing proved a practical computational technique, providing an efficient approach for actuator placement calculations without exhaustively searching all possible configurations. In another study, optimal actuators were utilized to control force and shape simultaneously [87].
5 Optimal Location of Actuators
The positioning of actuators to achieve the best control of a structure has a great importance [124,125,126,127,128]. Subsequently, various endeavors have been undertaken to optimize and decrease the structural deformation by identifying the most effective locations for actuators, the number of studies has been conducted since 1990 up to 2023 are shown in Fig. 8. This involves determining the least actuators required to accomplish the tasks. Furuya and Haftka [129] discovered that, even for small structures, the potential combinations for placing controllers could be vast. Due to the expensive cost of installing numerous actuators for control purposes, the quantity of actuators is usually restricted. As a result, finding the best locations for actuators becomes critical. Various researchers have tackled this issue by seeking global or nearly optimal solutions. Kwan and Pellegrino [58] stressed the significance of actuator locations in adjusting an inaccurate prestress distribution and obtaining optimal actuator adjustments for required actuation.
Haftka [130] explored analytical methods for optimally placing thermal and force actuators to control static distortions in massive space systems. The derived formulation drew on designing against the worst disturbances and minimized the analytical effort through numerical means. The study emphasized that actuator placement was more crucial for force actuators, though it was also important for thermal actuators. Furthermore, Reksowardojo, Senatore [131] conducted experimental testing of an adaptive truss that can change its shape to respond to the effects of loading. The placed actuators are optimized to ensure the structure can adapt to the optimal form for each load case. The experimental testing showed that the structure can adapt to a wide range of loading conditions and significantly reduce the structural loads.
Skelton and DeLorenzo [21] devised an algorithm known as the SD algorithm aimed at identifying the best locations for positioning actuators and sensors in optimal control. The method assesses the impact of adding up or removing actuators based on quadratic performance criteria at all available areas. It progressively eliminates the sites with minimal impact till the optimum actuators are nominated within the allowed quantity of control sites. Subramanian and Mohan [20] proposed a novel, straightforward algorithm known as the successive peak error correction, claiming its superior speed over the SD algorithm for statically controlling flexible structures while maintaining similar levels of precision.
A significant investigation explored actuator placement in large structures using heuristic integer programming to address shape control [113]. The study devised two iterative algorithms, the Worst-Out-Best-In (WOBI) and the Exhaustive-Single Point Substitution (ESPS). Both algorithms could attain shape control by repositioning actuators, although the outcomes relied on the preliminary assumption. Moreover, the researchers compared the outcomes of WOBI and ESPS with those gained from the SD algorithm for the shape control of a reflector. The study revealed that WOBI and ESPS produced better outcomes when selecting relatively few available sites. Though, the SD algorithm proved numerically more inexpensive than the two other algorithms when a substantial portion of the available sites needed to be nominated. It was also noted that achieving precise surface alignment with a limited number of actuators, even when strategically positioned, was challenging.
Following Haftka and Adelman [113], many researchers presented novel actuator placement methods, including genetic algorithms (GA). Rao, Pan [132] proposed a GA approach to address the precise optimal positioning of actuators in actively controlled systems, treating it as an optimization problem with binary encoding. They stated that their method may yield global-optimal solutions with adequate generations. The derivation was implemented to determine optimum actuator positions in the truss structure [132]. Similarly, Furuya and Haftka [129, 133] employed genetic algorithms and effectiveness indices to optimize the locations of actuators in significant space structures.
Simulated Annealing (SA) is a different algorithm for optimum actuator positioning. The SA method was applied to the problem of minimizing static distortion by optimizing actuator location in pin-jointed assemblies, as demonstrated on a large pin-jointed assembly for the least shape distortion [40]. Chen, Bruno [134] also employed SA to study the optimum positioning of active and passive members in intricate trusses. In a similar vein, Onoda and Hanawa [135] used a (GA), a modified GA (GA2), and an improved SA (ISA) method to tackle the actuator positioning optimization problem in the context of truss shape adjustment. The researchers determined that the three mentioned algorithms outperformed ESPS, WOBI, and SA when applied to a three-ring tetrahedral pin-jointed assembly.
Maghami and Joshi [136] presented an optimum actuator positioning method for actively controlling large, delicate space structures. They optimized the positioning of actuators to move the transmission zeros from the right-half-plane to the left-half-plane of the imaginary axis, a critical aspect for achieving rapid and optimal regulation and tracking capabilities. Moreover, they successfully applied this technique to a huge delicate system [136]. Additionally, Kwan and Pellegrino [58] investigated the identification of ideal locations for prestress actuators and the most efficient adjustments for these actuators to enhance the pre-existing, inaccurate prestress condition in pin-jointed trusses.
Irschik and Nader [137] also tackled the issue of actuator positioning to adjust the shape of weighted beam. They utilized the extension of the Mohr Analogy to eliminate movement and rotation at designated positions on the beam through piezoelectric. The researchers compared their proposed beam-type method and a two-dimensional FEA, yielding favorable results. Matunaga and Onoda [138] and Wang and Wang [139] recognized the optimum placement for actuators, they also mentioned that the actuators used in smart structures are crucial to their performance. The actuator’s category, their positions, and actuation amount must all be carefully considered by designers. Hadjigeorgiou, Stavroulakis [34] developed an FE model and a GA optimization technique for identifying and controlling damage in a piezoelectric-equipped composite beam with a cantilever configuration. The derivation was based on the shear formulation beam theory and the linear theory of piezoelectricity. The researchers demonstrated that although many actuators were typically required, careful positioning and optimum voltage values could also effectively attain adjust of the beam’s shape with fewer actuators.
A continuum approximation technique was introduced to enhance the cost-efficiency of actuator location optimization Burdisso and Haftka [140]. This approach allows the users to calculate the statistical characteristics of the adjusted form and demonstrated its performance as being favorable compared to exact statistical analysis. Furthermore, they established that continuous optimization techniques were considerably more economical than the integer programming approaches proposed by Haftka and Adelman [113]. Additionally, they determined that the continuum analysis led to optimized actuator positions, minimizing the weighted root mean square (rms) distortion. Moreover, their study revealed that the optimized design outperformed a design with evenly spaced actuators.
One of the primary drivers of shape control is the advancement of adaptive materials with inherent shape-changing properties. Smart materials, like shape memory alloys (SMAs), piezoelectric composites, and electroactive polymers, can undergo reversible deformations when exposed to external stimuli. For example, SMAs can regain their original shape after being subjected to heat or stress, offering self-repair and reconfiguration capabilities for aerospace structures operating under extreme conditions. In addition, optimal location based on the actuator power was studied [141, 142]. Hu, Li [143], Presented a study that seeks to explore the distributed activation response caused by piezoelectric patches on an adaptively supported paraboloidal cylindrical shell panel that is simply held in place. Moreover, Bruant and Proslier [144] introduced a revised optimization standard for addressing the pair of optimization challenges. It guarantees effective observability or controllability of the structure, while also factoring in residual modes to constrain the potential spill-over consequences. Another study was conducted to find optimal location of additional bars to minimize the total weight of space frames [145]. Reksowardojo, Senatore [146] Used a formulation based on stochastic search and the nonlinear force method to optimize the actuator placement and commands. This step ensures that the actuators are placed in the optimal locations and that the commands are optimally sent to the actuators so that the structure can adapt to the target shapes.

Studies on actuator placement in 1990–2023
6 Conclusion and Future Work
This paper presents an intensive review about structural controlling in the sconce of shape and stress, as well as types of actuators that can be used for length changing of structural members. In addition, the methods and the research dealt with minimizing number of actuators and finding optimal location of them were presented in detail. This study suggests further research in the field of structural controlling as follow.
-
Most of the methods established for shape and stress control of structures are liner techniques, while some structures are geometrically nonlinear especially cables structures. Linear methods are not as accurate as non-linear ones, thus establishing structural control methods based on non-linear methods for example dynamic relaxation method is suggested.
-
Using other powerful optimization algorithms to find optimum number of actuators.
-
Implementing different algorithms to find optimal location of actuators.
-
For smart systems, intelligent actuators can be designed that can reshape and redistribute stresses upon the desired levels.
References
Ziegler F (2005) Computational aspects of structural shape control. COMPUT STRUCT 83(15):1191–1204. https://doi.org/10.1016/j.compstruc.2004.08.026
Shea K, Fest E, Smith IFC (2002) Developing intelligent tensegrity structures with stochastic search. ADV ENG Inf 16(1):21–40. https://doi.org/10.1016/S1474-0346(02)00003-4
Sener M, Utku S, Wada BK (1994) Geometry control in prestressed adaptive space trusses. SMART MATER STRUCT 3(2):219. https://doi.org/10.1088/0964-1726/3/2/018
Sunar M, Rao SS (1999) Recent advances in sensing and control of flexible structures via piezoelectric materials technology. APPL MECH REV 52(1):1–16. https://doi.org/10.1115/1.3098923
Irschik H (2002) A review on static and dynamic shape control of structures by piezoelectric actuation. ENG STRUCT 24(1):5–11. https://doi.org/10.1016/S0141-0296(01)00081-5
Yuan S, Yang B, Fang H (2016) Improvement of surface accuracy for large deployable mesh reflectors. in AIAA/AAS Astrodynamics Specialist Conference. https://doi.org/10.2514/6.2016-5571
Yuan S, Yang B, Fang H (2018) The projecting surface method for improvement of surface accuracy of large deployable mesh reflectors. ACTA ASTRONAUT 151:678–690. https://doi.org/10.1016/j.actaastro.2018.07.005
Tagai R, Kitamoto K, Hamori H, Mizutani T, Kawashima T, Iwasaki A (2023) High-precision real-time displacement control for large optical system structure. in Proc.SPIE. https://doi.org/10.1117/12.2652282
Lu S, Qi X, Huang H, Hu Y, Li B (2018) Accuracy Adjustment Method of Cable net surface for large space deployable antenna. 2018 IEEE Int Conf Inform Autom (ICIA). https://doi.org/10.1109/ICInfA.2018.8812602
Saeed NM, Manguri AA, Szczepanski M, Jankowski R, Haydar BA (2023) Static shape and Stress Control of Trusses with Optimum Time, Actuators and Actuation. INT J CIV ENG 21(3):379–390. https://doi.org/10.1007/s40999-022-00784-3
Saeed NM, Kwan ASK (2016) Simultaneous displacement and internal force prescription in shape control of pin-jointed assemblies. AIAA J 54(8):2499–2506. https://doi.org/10.2514/1.J054811
Weeks CJ (1984) Static shape determination and control of large space structures: I. The flexible beam. J DYN SYST-T ASME 106(4):261–266. https://doi.org/10.1115/1.3140683
Weeks CJ (1984) Static shape determination and control of large space structures: II. A large space antenna. J DYN SYST-T ASME 106(4):267–272. https://doi.org/10.1115/1.3140684
Haftka RT, Adelman HM (1985) An analytical investigation of shape control of large space structures by applied temperatures. AIAA J 23(3):450–457. https://doi.org/10.2514/3.8934
Edberg DL (1987) Control of flexible structures by applied thermal gradients. AIAA J 25(6):877–883. https://doi.org/10.2514/3.9715
Du J, Zong Y, Bao H (2013) Shape adjustment of cable mesh antennas using sequential quadratic programming. AEROSP SCI TECHNOL 30(1):26–32. https://doi.org/10.1016/j.ast.2013.06.002
Korkmaz S (2011) A review of active structural control: challenges for engineering informatics. COMPUT STRUCT 89(23):2113–2132. https://doi.org/10.1016/j.compstruc.2011.07.010
Burdisso RA, Haftka RT (1990) Statistical analysis of static shape control in space structures. AIAA J 28(8):1504–1508. https://doi.org/10.2514/3.25245
Saeed N, Manguri A, Abdulkarim S, Shekha A (2019) Shape Restoration of Deformed Egg-Shaped Single Layer Space Frames. in 2019 International Conference on Advanced Science and Engineering (ICOASE), Duhok, Kurdistan Region, Iraq: IEEE. https://doi.org/10.1109/ICOASE.2019.8723714
Subramanian G, Mohan P (1996) A fast algorithm for the static shape control of flexible structures. COMPUT STRUCT 59(3):485–488. https://doi.org/10.1016/0045-7949(96)00266-0
Skelton RE, DeLorenzo ML (1983) Selection of noisy actuators and sensors in linear stochastic systems. LARGE SCALE SYST 4(2):109–136
Yoon H-S (2013) Optimal shape control of adaptive structures for performance maximization. STRUCT MULTIDISCIP O 48(3):571–580. https://doi.org/10.1007/s00158-013-0917-6
Salama M, Umland J, Bruno R, Garba J (1993) Shape adjustment of precision truss structures: analytical and experimental validation. SMART MATER STRUCT 2(4):240. https://doi.org/10.1088/0964-1726/2/4/005
Wang Z, Chen Sh, Han W (1997) The static shape control for intelligent structures. FINITE ELEM ANAL DES 26(4):303–314. https://doi.org/10.1016/S0168-874X(97)00086-3
Chee CYK, Tong L, Steven GP (2001) Static shape control of composite plates using a curvature–displacement based algorithm. INT J SOLIDS STRUCT 38(36):6381–6403. https://doi.org/10.1016/S0020-7683(01)00049-X
Chee CYK, Tong L, Steven GP (2002) Static shape control of composite plates using a slope-displacement-based algorithm. AIAA J 40(8):1611–1618. https://doi.org/10.2514/2.1831
Irschik H, Ziegler F (2001) Eigenstrain without stress and static shape control of structures. AIAA J 39(10):1985–1990. https://doi.org/10.2514/2.1189
Mitsugi J, Yasaka T, Miura K (1990) Shape control of the tension truss antenna. AIAA J 28(2):316–322. https://doi.org/10.2514/3.10391
Nyashin Y, Lokhov V, Ziegler F (2005) Stress-free displacement control of structures. ACTA MECH 175(1):45–56. https://doi.org/10.1007/s00707-004-0191-1
Tanaka H, Natori MC (2004) Shape control of space antennas consisting of cable networks. ACTA ASTRONAUT 55(3):519–527. https://doi.org/10.1016/0045-7949(92)90413-T
Saeed NM (2014) Prestress and deformation control in flexible structures. 2014, Cardiff University
Saeed NM (2022) Displacement Control of Nonlinear Pin-Jointed Assemblies Based on Force Method and optimization. AIAA J 60(2):1024–1031. https://doi.org/10.2514/1.J060568
Tanaka H (2011) Surface error estimation and correction of a space antenna based on antenna gainanalyses. ACTA ASTRONAUT 68(7):1062–1069. https://doi.org/10.1016/j.actaastro.2010.09.025
Hadjigeorgiou EP, Stavroulakis GE, Massalas CV (2006) Shape control and damage identification of beams using piezoelectric actuation and genetic optimization. INT J ENG SCI 44(7):409–421. https://doi.org/10.1016/j.ijengsci.2006.02.004
Yu Y, Zhang XN, Xie SL (2009) Optimal shape control of a beam using piezoelectric actuators with low control voltage. SMART MATER STRUCT 18(9):095006. https://doi.org/10.1088/0964-1726/18/9/095006
Senatore G, Duffour P, Winslow P, Wise C (2018) Shape control and whole-life energy assessment of an ‘infinitely stiff’prototype adaptive structure. SMART MATER STRUCT 27(1):015022. https://doi.org/10.1088/1361-665X/aa8cb8
Yang S, Ngoi B (2000) Shape control of beams by piezoelectric actuators. AIAA J 38(12):2292–2298. https://doi.org/10.2514/2.898
Du J, Bao H, Cui C (2014) Shape adjustment of cable mesh reflector antennas considering modeling uncertainties. ACTA ASTRONAUT 97(1):164–171. https://doi.org/10.1016/j.actaastro.2014.01.001
Xun G, Peng H, Wu S, Wu Z (2018) J Aerosp ENG 31(4):04018038. https://doi.org/10.1061/(ASCE)AS.1943-5525.000085. Active Shape Adjustment of Large Cable-Mesh Reflectors Using Novel Fast Model Predictive Control
Lang X, Damaren CJ (2023) Active shape control for flexible space structures using an optimal gyricity distribution. ADV SPACE RES 71(1):803–815. https://doi.org/10.1016/j.asr.2022.10.049
Zong Y, Zhang S, Du J, Yang G, Xu W, Hu N (2016) Shape Control of Cable-Network Antennas considering the RF performance. IEEE T ANTENN PROPAG 64(3):839–848. https://doi.org/10.1109/TAP.2015.2513088
Di J, Zhao Y, Sun Q, Duan B (2010) Shape adjustment based on optimization for cable mesh deployable antenna. 2010 3rd Int Symp Syst Control Aeronaut Astronautics: IEEE. https://doi.org/10.1109/ISSCAA.2010.5633988
Ren Z, Du J, Bao H, Ge D, Wang F (2023) Shape adjustment for uncertain mesh reflectors using machine learning. INT J MECH SCI 244:108082. https://doi.org/10.1016/j.ijmecsci.2022.108082
Yang G, Duan B, Du J, Zhang Y (2016) Shape pre-adjustment of deployable mesh antennas considering space thermal loads. P I MECH ENG G-J AER. 232(1):143–155. https://doi.org/10.1177/0954410016678432
Shon S, Kwan AS, Lee S (2014) Shape control of cable structures considering concurrent/sequence control. STRUCT ENG MECH 52(5):919–935. https://doi.org/10.12989/sem.2014.52.5.919
Wang Z, Li T, Cao Y (2013) Active shape adjustment of cable net structures with PZT actuators. AEROSP SCI TECHNOL 26(1):160–168. https://doi.org/10.1016/j.ast.2012.03.001
Zhang H, Lu J, Gong P, Li N (2023) Mechanical properties and shape-control abilities of a cable dome under asymmetrical loads. J CONSTR STEEL RES 208:108021. https://doi.org/10.1016/j.jcsr.2023.108021
Zhou W, Zhang Z, Wang X, Lv W, Hu X (2021) Structure-actuator Integrated Design of Piezo-Actuated Composite plate Wing for active shape control. J Aerospace Eng 34(6):04021070. https://doi.org/10.1061/(ASCE)AS.1943-5525.0001322
Trak AB, Melosh RJ (1992) Passive shape control of space antennas with truss support structures. COMPUT STRUCT 45(2):297–305. https://doi.org/10.1016/0045-7949(92)90413-T
Manguri A, Saeed N, Haydar B (2021) Optimal Shape Refurbishment of Distorted Dome Structure with Safeguarding of Member Stress. in 7th International Engineering Conference Research & Innovation amid Global Pandemic(IEC), Erbil, Iraq: IEEE. https://doi.org/10.1109/IEC52205.2021.9476107
Saeed N, Manguri A, Al-Zahawi S (2021) Optimum Geometry and Stress Control of Deformed Double Layer Dome for Gravity and Lateral Loads. in 2021 7th International Engineering Conference Research & Innovation amid Global Pandemic(IEC), Erbil, Iraq: IEEE. https://doi.org/10.1109/IEC52205.2021.9476094
You Z (1997) Displacement control of prestressed structures. COMPUT METHOD APPL M 144(1):51–59. https://doi.org/10.1016/S0045-7825(96)01164-4
Nouri-Baranger T (2004) Computational methods for tension-loaded structures. ARCH COMPUT METHOD E 11(2):143. https://doi.org/10.1007/BF02905937
Kirsanov MN (2016) Analysis of the buckling of spatial truss with cross lattice. MAG CIV ENG 4(64):52–58. https://doi.org/10.5862/MCE.64.5
Manguri A, Saeed N, Szczepanski M, Jankowski R (2023) Buckling and shape control of prestressable trusses using optimum number of actuators. SCI REP 13(1):3838. https://doi.org/10.1038/s41598-023-30274-y
Lagaros ND, Plevris V, Kallioras NA (2022) The Mosaic of Metaheuristic Algorithms in Structural optimization. ARCH COMPUT METHOD E 29(7):5457–5492. https://doi.org/10.1007/s11831-022-09773-0
Levy R, Hanaor A, Rizzuto N (1994) Experimental investigation of prestressing in double-layer grids. Int J Space Struct 9(1):21–26. https://doi.org/10.1177/026635119400900103
Kwan A, Pellegrino S (1993) Prestressing a space structure. AIAA J 31(10):1961–1963. https://doi.org/10.2514/3.11876
Roth JK, McCarthy TJ (2021) Optimizing compressive load capacity for differing tensegrity geometries. COMPUT STRUCT 249:106523. https://doi.org/10.1016/j.compstruc.2021.106523
Dong S, Yuan X (2007) Pretension process analysis of prestressed space grid structures. J CONSTR STEEL RES 63(3):406–411. https://doi.org/10.1016/j.jcsr.2006.04.006
Han Y, Xu B, Duan Z, Huang X (2021) Controlling the maximum stress in structural stiffness topology optimization of geometrical and material nonlinear structures. STRUCT MULTIDISCIP O 64(6):3971–3998. https://doi.org/10.1007/s00158-021-03072-1
Fan Z, Xia L, Lai W, Xia Q, Shi T (2019) Evolutionary topology optimization of continuum structures with stress constraints. STRUCT MULTIDISCIP O 59(2):647–658. https://doi.org/10.1007/s00158-018-2090-4
Xu B, Han Y, Zhao L (2021) Bi-directional evolutionary stress-based topology optimization of material nonlinear structures. STRUCT MULTIDISCIP O 63(3):1287–1305. https://doi.org/10.1007/s00158-020-02757-3
Chen A, Cai K, Zhao Z-L, Zhou Y, Xia L, Xie YM (2021) Controlling the maximum first principal stress in topology optimization. STRUCT MULTIDISCIP O 63(1):327–339. https://doi.org/10.1007/s00158-020-02701-5
Bruggi M, Duysinx P (2012) Topology optimization for minimum weight with compliance and stress constraints. STRUCT MULTIDISCIP O 46(3):369–384. https://doi.org/10.1007/s00158-012-0759-7
Gilewski W, Kłosowska J, Obara P (2017) The influence of self-stress on the behavior of tensegrity-like real structure. in MATEC WEB CONF: EDP Sciences. https://doi.org/10.1051/matecconf/201711700079
Kłosowska J, Obara P, Gilewski W (2018) Self-stress control of real civil engineering tensegrity structures. in AIP CONF PROC: AIP Publishing. https://doi.org/10.1063/1.5019157
Dai H, Yu Z (2023) A new design method for the openings of shell structures under the dual control of principal stress lines and stress contours. ADV ENG SOFTW 183:103479. https://doi.org/10.1016/j.advengsoft.2023.103479
AlBahar A, Kim I, Lutz T, Yue X (2022) Stress-Aware Optimal Placement of Actuators for Ultra-High Precision Quality Control of Composite Structures Assembly. in 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE). https://doi.org/10.1109/CASE49997.2022.9926532
Schoeftner J, Brandl A, Irschik H (2019) Control of stress and damage in structures by piezoelectric actuation: 1D theory and monofrequent experimental validation. Struct Control Health Monit 26(5):e2338. https://doi.org/10.1002/stc.2338
Zhang H, Lu J, Lu M, Li N (2023) Active control experiments on a levy cable dome. ENG STRUCT 278:115450. https://doi.org/10.1016/j.engstruct.2022.115450
Lu J, Lu M (2017) Application of ant colony algorithm in internal force control of adaptive cable dome. J SOUTHEAST UNIV NAT SCI ED 47(6):1161–1166. https://doi.org/10.3969/j.issn.1001-0505.2017.06.013
Xue Y, Luo Y, Xu X, Wan H-P, Shen Y (2021) A robust method for pre-stress adjustment of cable-strut structures based on sparse regression. ENG STRUCT 246:112987. https://doi.org/10.1016/j.engstruct.2021.112987
Chen L-M, Dong S-L (2013) Optimal Prestress design and construction technique of Cable-Strut Tension structures with Multi-overall Selfstress modes. ADV STRUCT ENG 16(10):1633–1644. https://doi.org/10.1260/1369-4332.16.10.1633
Guo J, Jiang J (2016) An algorithm for calculating the feasible pre-stress of cable-struts structure. ENG STRUCT 118:228–239. https://doi.org/10.1016/j.engstruct.2016.03.058
Zhang JY, Ohsaki M (2011) Force identification of prestressed pin-jointed structures. COMPUT STRUCT 89(23):2361–2368. https://doi.org/10.1016/j.compstruc.2011.07.007
Chen L, Jiang Z, Gao W, Zhou Y (2020) Identification and Adjustment of the Pretension deviation in Cable-Strut Tensile structures. KSCE J CIV ENG 24(1):143–152. https://doi.org/10.1007/s12205-020-1473-4
Zhang Q, Wang X, Cai J, Yang R, Feng J (2021) Prestress design for cable-strut structures by grouping elements. ENG STRUCT 244:112010. https://doi.org/10.1016/j.engstruct.2021.112010
Yuan X, Chen L, Dong S (2007) Prestress design of cable domes with new forms. INT J SOLIDS STRUCT 44(9):2773–2782. https://doi.org/10.1016/j.ijsolstr.2006.08.026
Krishnan S (2020) Structural design and behavior of prestressed cable domes. ENG STRUCT 209:110294. https://doi.org/10.1016/j.engstruct.2020.110294
Feron J, Latteur P (2023) Implementation and propagation of prestress forces in pin-jointed and tensegrity structures. ENG STRUCT 289:116152. https://doi.org/10.1016/j.engstruct.2023.116152
Zhang P, Feng J (2017) Initial prestress design and optimization of tensegrity systems based on symmetry and stiffness. INT J SOLIDS STRUCT 106–107:68–90. https://doi.org/10.1016/j.ijsolstr.2016.11.030
Wang Y, Xu X (2019) Prestress Design of Tensegrity Structures Using Semidefinite Programming. Adv Civ Eng. 2019: 5081463. https://doi.org/10.1155/2019/5081463
Averseng J, Crosnier B (2004) Prestressing tensegrity systems—application to multiple selfstress state structures. INT J STRUCT STAB DY 4(04):543–557. https://doi.org/10.1142/S0219455404001379
Kawaguchi K, Hangai K-IY, Pellegrino S, Furuya H (1996) Shape and stress control analysis of prestressed truss structures. J REINF PLAST COMP 15(12):1226–1236. https://doi.org/10.1177/073168449601501204
Yuan X, Liang X, Li A (2016) Shape and force control of prestressed cable-strut structures based on nonlinear force method. ADV STRUCT ENG 19(12):1917–1926. https://doi.org/10.1177/1369433216652411
Senatore G, Reksowardojo AP (2020) Force and Shape Control Strategies for Minimum Energy Adaptive Structures. Front. Built Environ 6. https://doi.org/10.3389/fbuil.2020.00105
Xu X, Luo YZ (2008) Multi-objective shape control of prestressed structures with genetic algorithms. P I MECH ENG G-J AER. 222(8):1139–1147. https://doi.org/10.1243/09544100JAERO394
Greene WH, Haftka RT (1990) Reducing distortion and internal forces in truss structures by member exchanges. AIAA J 28(9):1655–1662. https://doi.org/10.2514/3.25265
Xu X, Luo YZ (2009) Non-linear displacement control of prestressed cable structures. P I MECH ENG G-J AER. 223(7):1001–1007. https://doi.org/10.1243/09544100JAERO455
Manguri A, Saeed N, Kazemi F, Szczepanski M, Jankowski R (2023) Optimum number of actuators to minimize the cross-sectional area of prestressable cable and truss structures. STRUCT 47:2501–2514. https://doi.org/10.1016/j.istruc.2022.12.031
Manguri AA, Kwan ASK, Saeed NM (2017) Adjustment for shape restoration and force control of cable arch stayed bridges. Int J Comput Methods Exp Meas 5(4):514–521. https://doi.org/10.2495/CMEM-V5-N4-514-521
Liu S, Hao Y, Zou X (2014) Study on the stress of micro-S-shaped folding cantilever. ADV MECH ENG 12(5):1687814020924865. https://doi.org/10.1177/1687814020924865
Lee S-H, Shin K-J, Shin H-M, Lee H-D (2021) Design Procedure and Ultimate Capacity of New Turnbuckle for Measuring Tensile Force. INT J STEEL STRUCT 21(2):626–633. https://doi.org/10.1007/s13296-021-00461-6
Shin KJ, Lee SH (2011) Analysis and test of modified turn-buckles for measuring tensile force. J CONSTR STEEL RES 67(5):833–840. https://doi.org/10.1016/j.jcsr.2010.12.010
Lee SH, Shin KJ (2009) Test and analysis of a turn-buckle for tensile force measurement. J KOREAN SOC STEEL CONST 21(2):183–192. https://doi.org/10.18284/jss.2009.06.28.1.183
Olsson J (2006) Safety Turnbuckle. 2006: Karlstad, Sweden: Karlstads Universitet
Manguri A, Saeed N, Katebi J, Mahmood A, Jankowski R (2022) Optimal reshaping and Stress Control of Double-Layer Spherical Structures under Vertical Loadings. ARCH CIV ENG 68(4). https://doi.org/10.24425/ace.2022.143056
Saeed N, Katebi J, Manguri A, Mahmood A, Szczepanski M, Jankowski R (2022) Using Minimum actuators to control shape and stress of a double layer spherical model under gravity and lateral loadings. Adv Sci Technol Res J 16(6):1–13. https://doi.org/10.12913/22998624/155214
Lejano BA (2016) Fiber method analysis of rc beam retrofitted with turnbuckle external post-tensioning. COMPUT CONCRETE 17(1):67–86. https://doi.org/10.12989/cac.2016.17.1.067
Liew A, Stürz YR, Guillaume S, Van Mele T, Smith RS, Block P (2018) Active control of a rod-net formwork system prototype. AUTOMAT CONSTR 96:128–140. https://doi.org/10.1016/j.autcon.2018.09.002
Toral K, Lejano B (2015) Structural Retrofitting of Buildings: Turnbuckle Exterior Post Tensioning. in IABSE Conference: Elegance in structures, Nara, Japan, 13–15 May 2015. https://doi.org/10.2749/222137815815775592
Haftka RT, Adelman HM (1987) Effect of sensor and actuator errors on static shape control for large space structures. AIAA J 25(1):134–138. https://doi.org/10.2514/3.9592
Giusti SM, Mróz Z, Novotny AA, Sokołowski J (2017) Topology design of thermomechanical actuators. STRUCT MULTIDISCIP O 55(5):1575–1587. https://doi.org/10.1007/s00158-016-1593-0
Xia Q, Xia L, Shi T (2018) Topology optimization of thermal actuator and its support using the level set based multiple–type boundary method and sensitivity analysis based on constrained variational principle. STRUCT MULTIDISCIP O 57(3):1317–1327. https://doi.org/10.1007/s00158-017-1814-1
Chee CYK, Tong L, Steven GP (1998) A review on the modelling of piezoelectric sensors and actuators incorporated in intelligent structures. J INTEL MAT SYST STR 9(1):3–19. https://doi.org/10.1177/1045389X9800900101
Koconis DB, Kollar LP, Springer GS (1994) Shape control of composite plates and shells with embedded actuators. I. voltages specified. J COMPOS MATER 28(5):415–458. https://doi.org/10.1177/002199839402800503
Koconis DB, Kollar LP, Springer GS (1994) Shape control of composite plates and shells with embedded actuators. II. Desired shape specified. J COMPOS MATER 28(3):262–285. https://doi.org/10.1177/002199839402800504
Binette P, Dano ML, Gendron G (2009) Active shape control of composite structures under thermal loading. SMART MATER STRUCT 18(2):1–12. https://doi.org/10.1088/0964-1726/18/2/025007
Wang Z, Qin X, Zhang S, Bai J, Li J, Yu G (2017) Optimal shape control of piezoelectric intelligent structure based on genetic algorithm. ADV MATER SCI ENG STRUCT 2017. https://doi.org/10.1155/2017/6702183
Song G, Ma N, Li H-N (2006) Applications of shape memory alloys in civil structures. ENG STRUCT 28(9):1266–1274. https://doi.org/10.1016/j.engstruct.2005.12.010
Peng F, Jiang XX, Hu YR, Ng A (2008) Actuation precision control of SMA actuators used for shape control of inflatable SAR antenna. ACTA ASTRONAUT 63(5):578–585. https://doi.org/10.1016/j.actaastro.2008.01.043
Haftka RT, Adelman HM (1985) Selection of actuator locations for static shape control of large space structures by heuristic integer programing. COMPUT STRUCT 20(1):575–582. https://doi.org/10.1016/0045-7949(85)90105-1
Yuan S, Yang B (2021) Shape adjustment of large deployable mesh reflectors under thermal strain. in AIAA Scitech 2021 Forum. https://doi.org/10.2514/6.2021-1148
Ali A, Ghotbi E, Dhingra AK (2015) Optimum placement of actuators in structural and control design using Stackelberg games. J VIB CONTROL 21(7):1373–1382. https://doi.org/10.1177/1077546313494113
Chanekar PV, Chopra N, Azarm S (2017) Optimal actuator placement for linear systems with limited number of actuators. 2017 Am Control Conf (ACC). https://doi.org/10.23919/ACC.2017.7962975
Chen J, Jiang J, Wang K, Zhang F (2019) Optimal Placement of actuators for active vibration control using EER and genetic algorithm. 2019 IEEE 10th Int Conf Mech Aerosp Eng (ICMAE). https://doi.org/10.1109/ICMAE.2019.8880980
Dhingra AK, Lee BH (1994) Optimal placement of actuators in actively controlled structures. ENG OPTIMIZ 23(2):99–118. https://doi.org/10.1080/03052159408941347
Du J, Yue X, Hunt JH, Shi J (2019) Optimal Placement of Actuators Via sparse learning for composite fuselage shape control. J Manuf Sci Eng 141(10). https://doi.org/10.1115/1.4044249
Saeed NM, Manguri AAH, Adabar AM (2021) Shape and force control of cable structures with minimal actuators and actuation. Int J Space Struct 36(3):241–248. https://doi.org/10.1177/09560599211045851
Mahmood A, Katebi J, Saeed N, Manguri A (2022) Optimized Stress and Geometry Control of Spherical structures under Lateral Loadings. in 2022 8th International Engineering Conference on Sustainable Technology and Development (IEC). https://doi.org/10.1109/IEC54822.2022.9807455
Haftka RT (1991) Limits on static shape control for space structures. AIAA J 29(11):1945–1950. https://doi.org/10.2514/3.10823
Kincaid RK (1993) Minimizing distortion in truss structures: a comparison of simulated annealing and tabu search. STRUCT Optim 5(4):217–224. https://doi.org/10.1007/BF01743582
Reksowardojo AP, Senatore G, Smith IFC (2018) Actuator Layout Optimization for Adaptive Structures Performing Large Shape Changes. in Advanced Computing Strategies for Engineering, Cham: Springer International Publishing. https://doi.org/10.1007/978-3-319-91638-5_6
Bruant I, Coffignal G, Léné F, Vergé M (1999) Optimal location of piezoelectric actuators on beams structures. Proceedings of active 99: the international symposium on active control of sound and vibration: 327–338
Kondoh S, Yatomi C, Inoue K (1990) The positioning of sensors and actuators in the vibration control of flexible systems. JSME INT J III-VIB C 33(2):145. https://doi.org/10.1299/jsmec1988.33.145
Yang SM, Lee YJ (1993) Optimization of noncollocated sensor/actuator location and feedback gain in control systems. SMART MATER STRUCT 2(2):96. https://doi.org/10.1088/0964-1726/2/2/005
Hébrard P, Henrot A (2005) A spillover phenomenon in the optimal location of actuators. SIAM J Control Optim Eng Struct 44(1):349–366. https://doi.org/10.1137/S0363012903436247
Furuya H, Haftka RT (1995) Static shape control of space trusses with partial measurements. J Spacecr ROCKETS 32(5):856–865. https://doi.org/10.2514/3.26696
Haftka RT (1984) Optimum placement of controls for static deformations of space structures. AIAA J 22(9):1293–1298. https://doi.org/10.2514/3.8775
Reksowardojo AP, Senatore G, Srivastava A, Smith IF, Unterreiner H, Carroll C (2020) Design and control of a prototype structure that adapts to loading through large shape changes. IFAC PAPERSONLINE 53(2):8377–8382. https://doi.org/10.1016/j.ifacol.2020.12.1596
Rao SS, Pan TS, Venkayya VB (1991) Optimal placement of actuators in actively controlled structures using genetic algorithms. AIAA J 29(6):942–943. https://doi.org/10.2514/3.10683
Furuya H, Haftka RT (1995) Placing actuators on space structures by genetic algorithms and effectiveness indices. STRUCT Optim 9(2):69–75. https://doi.org/10.1007/BF01758822
Chen G-S, Bruno RJ, Salama M (1991) Optimal placement of active/passive members in truss structures using simulated annealing. AIAA J 29(8):1327–1334. https://doi.org/10.2514/3.10739
Onoda J, Hanawa Y (1993) Actuator placement optimization by genetic and improved simulated annealing algorithms. AIAA J 31(6):1167–1169. https://doi.org/10.2514/3.49057
Maghami PG, Joshi SM (1993) Sensor/actuator placement for flexible space structures. IEEE T AERO ELEC SYS 29(2):345–351. https://doi.org/10.1109/7.210073
Irschik H, Nader M (2009) Actuator placement in static bending of smart beams utilizing Mohr’s analogy. ENG STRUCT 31(8):1698–1706. https://doi.org/10.1016/j.engstruct.2009.02.026
Matunaga S, Onoda J (1995) Actuator placement with failure consideration for static shape control of truss structures. AIAA J 33(6):1161–1163. https://doi.org/10.2514/3.12540
Wang Q, Wang CM (2000) Optimal placement and size of piezoelectric patches on beams from the controllability perspective. SMART MATER STRUCT 9(4):558. https://doi.org/10.1088/0964-1726/9/4/320
Burdisso RA, Haftka RT (1989) Optimal location of actuators for correcting distortions in large truss structures. AIAA J 27(10):1406–1411. https://doi.org/10.2514/3.10278
Bhargava A, Chaudhry Z, Liang C, Rogers CA (1995) Experimental Verification of Optimal Actuator Location and Configuration based on Actuator Power factor. J INTEL MAT SYST STR 6(3):411–418. https://doi.org/10.1177/1045389X9500600313
Liang C, Sun FP, Rogers CA (1995) Determination of design of Optimal Actuator Location and Configuration based on Actuator Power factor. J INTEL MAT SYST STR 6(4):456–464. https://doi.org/10.1177/1045389X9500600402
Hu Sd, Li H, Tzou Hs (2011) Microscopic actuation and optimal actuator locations of paraboloidal cylindrical shells. in 2011 Symposium on Piezoelectricity, Acoustic Waves and Device Applications (SPAWDA). https://doi.org/10.1109/SPAWDA.2011.6167292
Bruant I, Proslier L (2005) Optimal location of actuators and sensors in active vibration control. J INTEL MAT SYST STR 16(3):197–206. https://doi.org/10.1177/1045389X05047989
Manguri A, Saeed N, Szczepanski M, Jankowski R (2023) Bending Moment Control and Weight Optimization in Space structures by adding Extra members in the optimal locations. Adv Sci Technol Res J 17(4):313–324. https://doi.org/10.12913/22998624/169573
Reksowardojo AP, Senatore G, Smith IF (2020) Design of structures that adapt to loads through large shape changes. J STRUCT ENG 146(5):04020068. https://doi.org/10.1061/(ASCE)ST.1943-541X.00026
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic Supplementary Material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Manguri, A., Saeed, N. & Jankowski, R. A Review: Structural Shape and Stress Control Techniques and their Applications. Arch Computat Methods Eng (2024). https://doi.org/10.1007/s11831-024-10149-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11831-024-10149-9