
Abstract
Complex flow around floating structures is a highly nonlinear problem, and it is a typical feature in ship and ocean engineering. Traditional experimental methods and potential flow theory have limitations in predicting complex viscous flows. With the improvement of high-performance computing and the development of numerical techniques, computational fluid dynamics (CFD) has become increasingly powerful in predicting the complex viscous flow around floating structures. This paper reviews the recent progress in CFD techniques for numerical solutions of typical complex viscous flows in ship and ocean engineering. Applications to free-surface flows, breaking bow waves of high-speed ship, ship hull–propeller–rudder interaction, vortex-induced vibration of risers, vortex-induced motions of deep-draft platforms, and floating offshore wind turbines are discussed. Typical techniques, including volume of fluid for sharp interface, dynamic overset grid, detached eddy simulation, and fluid–structure coupling, are reviewed along with their applications. Some novel techniques, such as high-efficiency Cartesian grid method and GPU acceleration technique, are discussed in the last part as the future perspective for further enhancement of accuracy and efficiency for CFD simulations of complex flow in ship and ocean engineering.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Ship and ocean engineering plays an important role in the contemporary society. For example, vessels transport goods around the world, platforms exploit oil for industry, underwater vehicles carry out scientific investigation, and so on. Understanding the hydrodynamic performance of ocean structures can help people design safer and more productive ocean structures. With the development of scientific knowledge, many fundamental problems about ship and ocean engineering have been solved. The resistance and stability of ships and platforms in still water can be precisely predicted. However, the dynamic features of real ship and ocean structures are complicated, including violent sea environment, the large motion of floating structures, the coupling of multi-systems, and the phenomena of noise and cavitation. To optimize the design of ocean structures, researchers have focused on resolving complex viscous flow in ship and ocean engineering.
Complex flow problems, such as multi-system interaction, nonlinear free surface, and turbulence flow, arise in ship and ocean engineering. Theoretical studies and experimental research used to be the major means in the past decades. In recent years, computational fluid dynamics (CFD) has become a powerful methodology to investigate these complex flow problems with the development of high-performance computing. CFD can obtain detailed flow field information so that the in-depth mechanism can be elucidated. CFD simulation can overcome the difficulties of nonlinear phenomenon and multi-system coupling in theoretical studies. Furthermore, CFD computations are relatively more cost-efficient than experiments. Therefore, more and more researchers apply CFD to study the complex flow problems in ship and ocean engineering.
Many topics and research fields are covered in ship and ocean engineering. Thus, only some typical complex flow problems are reviewed here, such as free-surface flows, ship breaking bow waves, ship hull–propeller–rudder interaction, vortex-induced vibration of risers, vortex-induced motions (VIMs) of deep-draft offshore platforms, and floating offshore wind turbines (FOWTs). Many researchers around the world have exerted efforts for the numerical study of complex flow problems. CFD techniques, including high-precision free surface, overset grid, detached eddy simulation (DES), and fluid–structure interaction (FSI), can extend the application of CFD solvers and improve calculation accuracy. Some applications referring to these techniques are also demonstrated. Finally, a brief conclusion is provided. The future perspectives using high-precision free-surface capturing schemes and GPU acceleration for further enhancement of accuracy and efficiency for CFD simulations of complex viscous flow problems are also mentioned.
2 Free-Surface Flows
In ship and ocean engineering, free-surface flow is one of the most featured phenomena. Such interfaces give rise to a highly diverse range of complexity in terms of their fluid mechanics, with its large density ratio moving interfaces. In the past few decades, considerable efforts have been devoted to develop numerical methods for solving interfaces. The volume of fluid (VOF) method is a well-established and extensively used interface capturing scheme in CFD regarding nonlinear surface wave propagation because of its robustness and rigorous numerical conservation (Jacobsen et al. 2012; Higuera et al. 2013; Cao and Wan 2014, 2015, 2017; Paulsen et al. 2014). This section only reviews the free-surface flows calculated by VOF methods especially in OpenFOAM.
In the VOF method, the volume fraction is used to identify the different phase regions and their interfaces. The key issue in a VOF scheme is how to approximate the numerical fluxes across the grid cell. In general, the flux is calculated using a geometrical or algebraic type of algorithm. The geometrical approach requires to construct the interface explicitly. At each time step, the constructed interface is carried forward by the velocity, and its new position should be identified. Thus, the flux can be obtained by calculating the volume swept by the interface. The most popular reconstruction method used in the VOF method is piecewise linear interface calculation (PLIC) (Youngs 1982; Puckett et al. 1997; Harvie and Fletcher 2000). The geometric VOF approach requires complicated manipulations to handle the geometric elements. Thus, this method is not only computationally expensive but also very difficult to extend to unstructured grids. In addition, its application is limited to real-case engineering problems because generating structural grids for complicated engineering structures is not a trial.
As an alternative, the numerical flux of the VOF field may be computed using general-purpose advection schemes to circumvent the complexity of geometrical reconstruction. However, numerical discretization schemes for advection term usually have intrinsic numerical dissipation and tend to smear the interface in the VOF function. The special procedures need to be employed to ensure the boundedness of the solution and to confine smearing of the interface (Ubbink and Issa 1999; Rusche 2003). These schemes, without the explicit geometric reconstruction, are sorted to the algebraic VOF method, which can be easily extended to unstructured grids, such as the Compressive Interface Capturing Scheme for Arbitrary Meshes (CICSAM) (Ubbink and Issa 1999) and High-Resolution Interface Capturing (HRIC) scheme (Muzaferija 1999). In OpenFOAM, an additional convective term (Rusche 2003) is employed in interface compression and widely used in engineering applications. An algebraic interface capturing method is much simpler and more computationally efficient than a geometric VOF scheme but generally not as competitive as the geometric-type VOF schemes in solution quality. For instance, the interface solved by the interFOAM solver in OpenFOAM, known as MULES (Deshpande et al. 2012), can be in the range of two or three grids where a sharp interface within one cell is expected (Roenby et al. 2016). This category remains to be improved and is worthy of further investigation. Basing from this situation, many researchers devoted efforts to improving the efficiency of the geometric-type model and extending it to unstructured grids or exploring the potential of the algebraic-type model to enhance accuracy.
The geometric-type model isoAdvector (Roenby et al. 2016) is proposed to work on arbitrary meshes, retain the accuracy of the geometric schemes by explicitly approximating the interface, and maintain the geometric operations at a minimum to obtain acceptable calculation times. In this method, an isosurface is numerically calculated from the volume fractions to represent the interface and efficiently estimate the distribution of fluids inside computational cells. This method is robust even on unstructured meshes. It avoids the gradient calculations traditionally used in geometric VOF reconstruction, which may cause problems. Figure 1 shows a benchmark result from the author: a circular region of fluid A of radius R = 0:25 moving in a constant and uniform velocity field. The author compared its performance with three algebraic VOF schemes: MULES, HRIC, and CICSAM.

Disk in uniform flow U = (1, 0.5) at time t = 4 on a square mesh with five grid resolutions. Volume fractions are shown in gray scale. Exact solution is shown with red circles. α = 0:5 contour is shown in blue, and α = 0:01 and α = 0:99 contours are shown in green (Roenby et al. 2016)
The author concluded that the isoAdvector method is significantly better than the reference schemes with calculation times similar to those of HRIC and CICSAM and significantly lower than that of MULES.
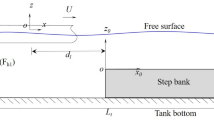
Aside from the works focused on the geometric-type model, several attempts have been made to improve the quality of the algebraic-type model. Many researchers paid attention to the jump condition treatment across a sharp, moving interface. Tangent of hyperbola for interface capturing (THINC) (Xiao et al. 2005) is a successful algebraic method that utilizes the hyperbolic tangent function to compute the numerical flux for the fluid fraction function and gives a conservative, oscillation-less, and smearing-less solution to the fluid fraction function even for the extremely distorted interfaces of arbitrary complexity. The step-like nature of the hyperbolic tangent function makes it a suitable presentation of the distribution of volume fraction. THINC can be used as a conservative advection scheme to transport the VOF function and give solutions with compact thickness of the transition jump. Subsequently, THINC schemes were extended for unstructured grids (Ii et al. 2014; Xie et al. 2014b). After the consistency improvement, the THINC method on unstructured grids can achieve competitive solution quality and is more computationally efficient than the geometric method. Zhang et al. (2019) built a 2D wave tank to validate the performance of the THINC/QQ method (Xie and Xiao 2017). In that work, a volume-average/point-value multi-moment scheme (Xie et al. 2014a) was involved to solve the fluid dynamics. The simulation results of 2D waves were compared between THINC/QQ and interFOAM solvers. Figure 2 shows that with interFOAM solver, the wave decay aggravates as the wave trains propagate along the tank with phase lags over the x-location. The wave height and wavelength simulated with the THINC/QQ + VMP model are maintained well and agree well with the reference solutions throughout the working area.

2D wave simulation results interFOAM vs. THINC + VMP (Zhang et al. 2019)
The VOF method mentioned above is focused on the jump condition of the phase fraction. In addition, a jump of dynamic pressure is observed across the interfaces. The ghost fluid method (GFM) is devised to handle these jumps. Considering that the GFM is originally designed to the level-set method, Vukčević et al. (2017) extended the GFM to VOF based on the arbitrary polyhedral finite volume framework for free-surface flow simulations. Through the GFM, two immiscible, incompressible fluids are implicitly coupled via interface jump conditions, allowing the formulation of a single set of equations for both fluids. The key of the GFM is to correct the dynamic pressure and its gradient on the cell surfaces located between dry and wet cells required by the FV discretization of momentum and pressure equations. The GFM method successfully resolves the spurious velocities at the free surface caused by segregated solution algorithms, and a sharper interface can be obtained. Although one of its drawbacks is the neglect of surface tension, it is suitable for large length-scale free-surface water–air flows encountered in marine hydrodynamics. Jasak et al. (2018) studied full-scale CFD self-propulsion simulations for two ships: a general cargo carrier and a car carrier. In their study, the GFM is also used to capture the free surface. The achieved speed predicted with CFD is comparable with sea trial measurements, where the relative error is within 0.3% for both ships. In the simulations, authors have noticed the occurrence of breaking waves in front of the bow due to vertical, cylindrical bow stem without a bulb, as indicated in Figure 3a. Similar flow features have been observed at the stern near the intersection of the rudder with a free surface, as shown in Figure 3b.

Dynamic pressure field in bow and stern regions for REGAL ship (Jasak et al. 2018)
Recently, Gatin et al. (2019) have calculated extreme green sea loads upon a vertical deck structure of an ultra-large container ship with the GFM method. The simulations were conducted using a newly developed flow model that considers air compression in violent free-surface phenomena. It shows that a significant amount of water is shipped onto the deck, encountering the breakwater. Vukčević et al. (2018) combined the GFM method and the isoAdvector (Roenby et al. 2016) approach and validated the method for wave-related problems in ocean engineering by considering the following cases: (i) wave propagation of a 2D wave with moderate steepness, (ii) green water simulations for a ship model with violent free-surface flow patterns. This study concluded that the GFM method is suitable to predict the complex free-surface flows around ship and offshore structures.
On the basis of the discussions above, the comparison of different VOF methods is summarized in Table 1, and the merits and demerits of each approach are concluded.
In addition to the free-surface flows investigated using the VOF method discussed above, many active studies focused on using other techniques. The level-set method is also widely used to capture the free-surface flows in ship hydrodynamics (Carrica et al. 2007; Sadat-Hosseini et al. 2013, 2016). Some studies used the coupled VOF and level-set methods (Wang et al. 2009; Bihs and Kamath 2017) to investigate the free-surface flows, and they were not reviewed herein.
3 Breaking Bow Waves
Breaking bow waves have long been recognized for advancing ship in high speed. So far, ship resistance can be well predicted, but to accurately resolve, the flow field is still challenging, especially for the breaking wave phenomenon. Many researchers studied the profile of bow wave and its breaking process through CFD to evaluate the physical mechanism and the effect on ship performance of the breaking bow waves accurately.
Among several CFD techniques resolving free surface, level-set and VOF methods were commonly used to predict the breaking wave phenomena for high-speed ships. Wilson et al. (2006) adopted the URANS solver CFDShip-Iowa to predict the hydrodynamic performance of a high-speed surface ship (R/V Athena I) under different speeds (Fr = 0.25, 0.43, and 0.62). The single-phase level-set method was used to capture free surface, and local refinements with structured overlapping grids were applied in the bow and transom wave region. Good agreement was achieved for velocity components and axial vorticity at four cross planes, which indicated that the CFD approach can accurately predict the detailed wake flow and breaking bow wave. Carrica et al. (2010) performed large-scale DES computations for a surface combatant DTMB 5512 using over 60 million cells. The simulation results showed significant improvements in the local flow and free-surface results but minor enhancements in forces and moments when compared with previous URANS computations with coarser grids. Mousaviraad et al. (2015) conducted DES computations for a high-speed planning craft (Fr = 0.59–1.78) using the single-phase level-set solver CFDShip-Iowa V4.5 and the two-phase VOF solver CFDShip-Iowa V6.2. Results showed that the tails of the spray are not well resolved and that finer grid resolution is required for better prediction. Broglia and Durante (2017) used a single-phase level-set method to accurately predict the complex free-surface flow around a high-speed craft with a series of Froude numbers ranging from 0.6 to 1.2. The methodology is proven reliable in the accurate prediction of the wave pattern, velocity, and pressure fields. Wang et al. (2018a, 2020) conducted a comparative study of breaking bow wave simulation based on the Reynolds-averaged Navier–Stokes (RANS) and delayed detached eddy simulation (DDES) methods, respectively. Results showed that the DDES approach can provide a better description of the wave pattern through the comparison of experimental measurements.
Apart from the RANS and DES approaches incorporated with VOF or level-set methods based on mesh methods, meshless methods or particle methods were also applied to resolve the violent free surface of breaking bow waves. Marrone et al. (2011, 2012) developed a 2D + t SPH model and a 3D SPH solver to analyze the breaking wave pattern of the vessel DTMB 5365, and the overturning and breaking of bow wave were captured clearly as shown in Figure 4. The results were also compared with the experimental measurements and numerical results from the RANS simulations in which the level-set method was applied to resolve the free surface.

Breaking wave result by 3D SPH simulations (Marrone et al. 2012)
4 Hull–Propeller–Rudder Interaction
As computers and numerical methods advance, direct computations of hull–propeller–rudder interaction during ship maneuvers and seakeeping have become feasible. Compared with the conventional method based on system-based simulation and potential code, CFD is a higher-fidelity method based on physical principles and yields results that are typically more accurate with almost no need for empirical inputs. Accurate prediction can improve the evaluation of navigational safety and hydrodynamic loads, including forces and moments. Optimization of fuel consumption can help achieve this goal. The present types of CFD simulation solvers for ship hull–propeller–rudder interaction are listed in Table 2.
With the purpose of directly predicting the behavior of ship maneuvering, a CFD solver named naoe-FOAM-SJTU (Wang et al. 2019) was developed by the Computational Marine Hydrodynamics Lab (CMHL) in Shanghai Jiao Tong University. At its early version, Shen et al. (2015) implemented the dynamic overset grid technique into the open source code OpenFOAM with application to KRISO Container Ship (KCS) self-prolusion and maneuvering. The implementation relied on the code Suggar to compute the domain connectivity information dynamically at run time. Self-propulsion and zigzag maneuvers of the KCS model were used to validate the dynamic overset grid implementation. For self-propulsion, the ship model was fitted with the KP505 propeller, achieving self-propulsion at Fr = 0.26. Computational results compared well with experimental data of resistance, free-surface elevation, wake flow, and self-propulsion factors. Free maneuvering simulations of the HSVA KCS model appended with the HSVA propeller, and a semi-balanced horn rudder was performed at constant self-propulsion propeller rotational speed. Results for a standard 10/10 zigzag maneuver (Figure 5) and a modified 15/1 zigzag maneuver showed good agreement with experimental data, even though relatively coarse grids were used.

Vortical structures represented by isosurfaces of Q visualizing vortices produced by propeller, rudder, and hull interaction for the 10/10 zigzag maneuver (Shen et al. 2015)
The naoe-FOAM-SJTU solver was further extended to the application involving waves. Wang et al. (2017) extended the free-running simulations from calm water to waves for a course-keeping maneuver and showed the capability of CFD with dynamic overset grid in predicting ship maneuvering in waves. The self-propulsion model point was used for the free-running computation under course-keeping control in waves, where three regular waves were considered: head wave, bow quartering wave, and beam wave. A new course-keeping control module was developed using feedback controller based on the CFD solver naoe-FOAM-SJTU to fulfill the course-keeping demand. Good agreements were achieved for self-propulsion and course-keeping tests. This result showed that free-running ship simulations especially in waves using the CFD approach coupled with newly developed course-keeping module are feasible and reliable. In addition, Wang et al. (2018b) further investigated the ship maneuvering in waves. It presented the direct simulations of free-running zigzag maneuver in calm water and waves coupled with open source toolbox waves2foam (Jacobsen et al. 2012) to generate the desired wave environment with the moving computational domain. Different wave heights were also considered to study how the wave height affects the performance of free-running ship maneuver. In consideration that the CFD simulations could take most of the effects into account, unsteady and nonlinear behavior was found in the hydrodynamic loads acting on the hull, twin propellers, and rudders. Future work (Wang and Wan 2018) includes simulations of turning circle maneuver in waves to study the wave effects on the trajectory and the course, which are other important characteristic parameters for evaluating ship maneuverability in waves.
Despite the work from CMHL, many researchers also performed the direct simulation of hull–propeller–rudder interaction. Dubbioso et al. (2013) computed turning circle maneuvers of a tanker-like ship model using CFD solver χnavis and evaluated the performance of several propeller models in strong oblique flows. Carrica et al. (2012) simulated the turn and zigzag maneuver by using the RANS solver CFDShip-Iowa where the deflection of rudders was achieved by the dynamic overset grid technique with a hierarchy of hull and rudders, while the rotating propellers were simplified by body forces. Furthermore, Carrica et al. (2012) performed maneuver simulations in waves by using the simplified model and found that the main discrepancy between the CFD and experiments can possibly be tracked to the simplistic propeller model. Mofidi and Carrica (2014) presented the direct simulation of free-running zigzag maneuver for a single screw KCS, where standard 10/10 zigzag maneuver and modified 15/1 zigzag maneuver (Figure 6) with actual rotating propeller and turning rudder were computed in calm water. The results are promising when compared with the experiment, although the authors emphasized that the computational cost in direct calculating free-running ships is still very high. Mofidi et al. (2018) employed the CFD solver REX to simulate ship maneuvers using the body force propeller and actual propeller model. When the improved body force propeller model is introduced, the computational cost is decreased significantly and the accuracy is relatively high.

Isosurfaces of Q = 5000 colored with dimensionless U-velocity for the 15/1 maneuver. a and c show zero yaw, and b and d are maximum and minimum yaw, respectively (Mofidi and Carrica 2014)
Broglia et al. (2015) and Dubbioso et al. (2016) used a similar overset grid approach to simulate the turning circle maneuver in calm water by using a finite volume method CFD solver. The ship model was a fully appended twin-screw vessel with a single rudder. The twin rotating propellers were simulated by an actuator disk model, which was modified to account for oblique flow effects. The distribution of forces and moments on the hull and appendages was analyzed further to obtain the hydrodynamic behavior in turning tests. Recently, Dubbioso et al. (2017) and Muscari et al. (2017) have conducted CFD investigations of propeller bearing loads in steady and transient maneuvers using the overset grid approach. Bekhit (2018) adopted ISIS-CFD to simulate the self-propulsion performance of JBC ship and compared the results computed by the body force and actual propeller model. Bakica et al. (2019) applied numerical simulations of self-propulsion for KCS and JBC ships using Naval Hydro Pack. The propeller was modeled by an idealized pressure-jump actuator disk model. They also compared the flow field with the experiment, and the comparison showed fair agreement.
5 Vortex-Induced Vibration
Marine riser is the key equipment for deep-sea oil exploration and is also one of the weakest parts in the offshore platform structure. Under the influence of currents, vortex-induced vibration occurs. In the past decade, the exploitation of offshore oil and gas resources has turned to the deep sea, resulting in a rapid increase in the aspect ratio of marine risers, even up to 1000. The increase in aspect ratio makes it easier for the riser to generate high-order vibration modes, while the fatigue damage caused by vortex-induced vibration (VIV) becomes more serious.
For long flexible risers, VIV is more complicated for the fact that the riser tends to vibrate at different frequencies along its axial direction (Vandiver et al. 2009). Different from rigid cylinders, flexible risers are more prone to multi-modal vibrations, and the traveling wave characteristics are obvious. The 3D effect complicates the wake vortex dynamics and structural dynamics of the VIV response for the long flexible riser, which create a difficulty in predicting the vibration response (Chen et al. 2017). Therefore, the vortex-induced vibration response must be predicted using the time and frequency domain methods, and the vibration response mechanism must be analyzed from the perspective of complex flow field.
Given the limitations of experimental conditions, research on complex flow field for VIV through experimental methods is relatively rare. With the rapid development of computer technology, different numerical simulation methods based on CFD, such as direct numerical simulation (DNS), large eddy simulation (LES), DES, discrete vortex method (DVM), and RANS, have been used to simulate the VIV of flexible risers in recent years. The comparison of different methods in VIV research and their corresponding features is shown in Table 3.
Given the limitation of computing resources, the DNS method is rarely used for the numerical simulation of the VIV of flexible risers with large aspect ratios. Bourguet et al. (2015) used DNS to investigate the VIV of a flexible riser with an aspect ratio of 50 at a Reynolds number equal to 500. The vortex structure is notably more disordered than in the stationary cylinder case at the same inclination angle, as shown in Figure 7 a and b. The wake of the stationary cylinder exhibits a clear oblique vortex-shedding pattern, whereas the spanwise vortex rows forming downstream of the flexible cylinder remain essentially parallel to the cylinder axis in the near wake.

Instantaneous isosurfaces of the spanwise vorticity. Arrows represent the oncoming flow (Bourguet et al. 2015)
Wang and Xiao (2016) conducted fully 3D FSI simulations of the VIV of a vertical riser with an aspect ratio of 481.5 subjected to complex currents by using the ANSYS MFX multi-field solver and the LES method. Numerical results showed that the majority of the vortex shedding exhibits a clear 2S pattern, whereas a 2P mode was observed near the position where the maximum vibration amplitude appeared. Using the LES method, Chen and Kim (2010) attempted to give a reasonable interpretation of the coupling mechanism between VIV and wake structure.
Meneghini et al. (Meneghini et al. 2004) used the DVM method to investigate the hydroelastic interactions occurring between fluid forces and oscillating flexible cylinders. A 2S mode was found on regions of low amplitudes while changing to 2P mode in regions of large amplitudes. The position where the modes transition occurred varied as the velocity was reduced. Yamamoto et al. (2004) calculated the hydrodynamic forces of cylinders subjected to uniform and shear flow. Visualizations of the wake structures indicated a hybrid mode of vortex shedding along the span.
Lam et al. (2006) investigated the VIV of a cylinder row and a staggered cylinder array at a Reynolds number of 2.67×104 by using an SVM-based FSI model. For the simulation cases, the vorticity map was produced and compared with flow visualization results in detail.
Recently, Joshi and Jaiman (2017) have developed a bounded and positivity-preserving variational method for the turbulence transport equation of Spalart–Allmaras-based DDES. Based on the developed solver, simulations were made on the VIV of a flexible riser subjected to currents. The 2S mode of vortex shedding was observed in most locations, while a widened 2S with two-row and 2P modes was observed near the locations with large vibration amplitudes, as shown in Figure 8.

Vibration amplitude along the flexible riser with Z-vorticity contours in different sections (Joshi and Jaiman 2017)
Although full 3D simulation can consider the 3D characteristics of the vortex (Figure 9) structure and provide detailed wake information, it still costs too much computing resources. Considering this limitation, some researchers have developed the strip theory to simulate the VIV of long flexible risers. The CMHL research group has developed the VIV solver viv-FOAM-SJTU based on strip theory and OpenFOAM. Several VIV simulations (Duanmu et al. 2017, 2018; Fu and Wan 2017; Fu et al. 2017, 2018) of flexible risers with different structural parameters and subject to complex currents have been carried out with this solver. Fu et al. (2018) simulated the VIV of a horizontal flexible riser subjected to an oscillatory flow with the RANS method. The numerical results are in good agreement with the experimental results, and the development of wake behind the riser has been observed.

Vortex shedding along riser from inflow and cross-flow view (Duanmu et al. 2018)
Recently, Bao et al. (2016) have introduced a generalized thick strip modeling method for the VIV prediction of long flexible risers. The numerical results are in good agreement with the available experimental results. The 3D characteristics of the wake structure were captured, as shown in Figure 10.

Perspective view of the instantaneous spanwise vortex structure of the flow (Bao et al. 2016)
6 Vortex-Induced Motions
VIM occurs as a consequence of strong current. VIM is a common phenomenon on various kinds of deep-draft offshore platforms. Viscous flow around floating platforms is complex, and the motion is large, making it a difficult problem in ocean engineering.
Recently, more and more researchers are solving the high Reynolds number turbulent flow around floating platforms using the CFD technique incorporated with different methodologies. Munir et al. (2018a) conducted a 2D numerical simulation to study the effect of plane boundary on a two-degree-of-freedom vortex-induced motion of a circular cylinder in oscillatory flow. Munir et al. (2018b) further carried out a 3D numerical investigation of the vortex-induced vibration of a rotating circular cylinder in uniform flow. The lock-in regime of a rotating cylinder is wider than that of a non-rotating cylinder for α = 0, 0.5, and 1. The vortex-shedding pattern of a rotating cylinder is similar to that of a non-rotating cylinder. The VIM is suppressed when the rotation rate exceeds a critical value, which is dependent on the reduced velocity. The vortex shedding is in a 2P mode with two pairs of vortices shed from the cylinder in one period of vibration. Xie et al. (2017) presented a 3D CFD simulation of the vortex-induced motion of a buoyancy can in currents. The numerical tests were conducted with a buoyancy can under different reduced velocities utilizing the SST-DDES turbulence model and the overset grid method.
The increased draft renders the semi-submersibles susceptible to coherent vortex shedding and considerably increases the VIM. The geometry of semi-submersibles, multi-column, and multi-pontoon implies a more complex VIM phenomenon than that of single-column floaters. The VIM of deep-draft semi-submersibles is more complex than that of single-column floaters because of the wake interference between columns and the considerable yaw motions.
With the use of CFD, Rijken (2014) investigated the VIM responses of semi-submersibles with different column cross-sectional shapes, including square, rectangular, and pentagonal. Waals et al. (2007) discussed the effect of mass ratio and draft on the VIM of semi-submersible platform and found that semi-submersibles with small column heights show much less flow-induced cross-flow and yaw response than those with large column heights. Goncalves et al. (Gonçalves et al. 2012; Gonçalves et al. 2013) discussed systematically the effects of current incidence angles, hull appendages, surface waves, external damping, and draft conditions on the VIM of a semi-submersible platform. Chen et al. (Chen and Chen 2016) used the finite-analytic Navier–Stokes code in conjunction with a moving overset grid approach to simulate the VIM of a deep-draft semi-submersible. A DES calculation was performed to check against the LES model. Antony et al. (2015) utilized CFD analysis and model testing to determine the sensitivity of VIM responses of deep-draft column stabilized floaters to geometric parameters. The CFD tools used in his study were AcuSolve™ from Altair Engineering, Fluent™ from ANSYS, and STAR-CCM+™ from CD-adapco. Kara et al. (2016) used OpenFOAM on a model scale, deep draft, “Paired-Column” semi-submersible to estimate the VIM response and proposed that DES is a powerful turbulence model and recommended for CFD-based VIM simulations.
Zhao et al. (2018) presented a numerical approach for simulating the VIM of deep-draft semi-submersibles. In specific, DES was used for turbulence modeling and dynamic overset grid (Figure 11) was used for moving objects. Simulations for the stationary drag and VIM of a model-scale paired-column semi-submersible were conducted with the proposed approach. The vortex shedding between multiple columns is given by the CFD simulation shown in Figure 12.

Overset mesh assembly for VIM simulations (Zhao et al. 2018)

Instantaneous non-dimensional spanwise vorticity contour at half draft (z/H = − 0.5) plane (Zhao et al. 2018)
7 Floating Offshore Wind Turbine
With the development of the offshore wind industry, several countries have planned to build floating offshore wind farms consisting of multiple floating wind turbines in deep-sea areas to gain huge amounts of wind energy. However, designing the FOWT system is a challenging task due to the complicated structure, the complex environmental loading, and the coupling effects (Tran and Kim 2018). Compared with conventional onshore wind turbines or fixed-bottom wind turbines working in shallow water, a FOWT suffers much more complicated environmental loads, such as the aerodynamic forces on turbine rotor, the hydrodynamic loads on the floating support platform, and the mooring forces. The hydrodynamics of the floating support platform is also affected greatly by the aerodynamic loads and high unsteady characteristics, which consequently increase the aerodynamic instability of turbine rotor. Coupled interactions between the aerodynamics of the wind turbine and the hydrodynamics of the floating platform hinder the accurate prediction of the performance of the FOWT system (Shen et al. 2018).
Accurate prediction of the dynamic responses of FOWTs is necessary to understand the coupled aero-hydrodynamic performance of the FOWT system under realistic ocean environment. Although experimental tests are reliable to investigate the coupled performance of FOWT with the offshore wind-wave environment, these tests are expensive and time-consuming and difficult to perform under controlled conditions.
Compared with experimental tests, applying numerical methods for full-scale FOWT analysis costs much less and inherently satisfies the essential scaling laws, which makes it is an advisable choice. Several coupled analysis tools based on different numerical methods have been developed for FOWTs, as shown in Table 4. The blade element momentum (BEM) and generalized dynamic wake (GDW) models are widely used for the aerodynamic analysis of wind turbines because they are fast and produce results that meet the engineering requirements. However, studying the complex flow field characteristics of FOWTs is too simple (Figure 13). The detailed flow field information cannot be obtained either. For the hydrodynamics of floating platforms, the potential flow theory and Morison’s equation are commonly selected to obtain the hydrodynamic forces and motion responses, which acquire the advantages of saving time and computational resources. However, the coupling effects between the wind and wave and detailed coupled aero-hydrodynamic characteristics cannot be modeled (Figure 14). Although the CFD method costs more computational resources, all physical effects of a FOWT system can be directly modeled (Christensen et al. 2005). In addition, precise results can be obtained to study the dynamic responses of FOWTs. CFD has been widely used for the analysis of FOWT systems.

Velocity contours for different blade locations with respect to the tower (Tran and Kim 2018)

Coupled aero-hydrodynamic simulation of the FOWT system (Liu et al. 2017)
Many researchers have performed CFD simulations to investigate the aero-hydrodynamic responses of FOWTs. Tran and Kim (2016) conducted the fully coupled aero-hydrodynamic analysis of a semi-submersible FOWT using a dynamic fluid body interaction approach. The overset grid technique was applied to handle the rotation of wind turbine blades. Liu et al. (2017) established a fully coupled CFD analysis tool for FOWTs based on OpenFOAM package, and the coupling effect of the OC4 DeepCWind semi-submersible FOWT was studied. Sliding mesh and three sets of grids were adopted to achieve the multi-level motions of the FOWTs. Quallen et al. (2013) coupled a quasi-static crowfoot mooring model with a two-phase CFD solver to study the coupled aero-hydrodynamic performance of OC3 spar-type FOWT under wind and wave conditions.
CFD simulations achieve accurate results and enable detailed quantitative analysis of flow field. However, a full-structure CFD simulation has large computational cost. To make the cost of CFD simulations acceptable, the actuator line model (ALM) is adopted to model the wind turbine aerodynamics in the offshore wind farm. Using the ALM is an effective way to reduce computational cost by replacing the real blade structure with virtual actuator lines and guarantee considerable precision by solving the Navier–Stokes equations in flow field. Mikkelsen et al. (2007) analyzed the effect of wake interaction for three in-line model wind turbines in a wind farm based on the actuator line technique, and detailed unsteady behavior of interacting wakes was captured. Troldborg et al. (2011) studied the wake interaction between two wind turbines by using the ALM. The averaged velocity and turbulence fields as well as the development of wake generated vortex structure were extracted to understand the interacting wakes. Li et al. (2015) developed an unsteady actuator line model (UALM) and embedded it into a 3D Reynolds-averaged Navier–Stokes solver to model the unsteady aerodynamics of the FOWT. Cheng et al. (2019) coupled the UALM and in-house code naoe-FOAM-SJTU to establish a coupled analysis tool FOWT-UALM-SJTU solver for the aero-hydrodynamic simulations of the FOWTs. The coupled responses of a FOWT with NREL-5MW baseline wind turbine mounted on a semi-submersible platform were investigated. Huang et al. (2018) investigated the wake interactions between two in-line FOWTs based on the UALM (Figure 15). The influence of layouts on the dynamic responses of FOWT was also discussed using the in-house code FOWT-UALM-SJTU solver.

Coupled aero-hydrodynamic simulations for two in-line FOWTs based on the unsteady actuator line model (Huang et al. 2018)
Floating wind turbines have received considerable attention in the past years. Traditional numerical analysis methods, such as the BEM and vortex methods, cannot satisfy the analysis requirement of complex flow. Thus, CFD has been widely used to investigate the coupled dynamic responses of FOWTs. With the development of the offshore wind industry, the complex flow field characteristics, the greatly influence on the annual energy production, operation, and maintenance cost of floating wind farms need to be studied in the future.
8 Conclusion and Future Perspectives
Several complex viscous flow problems in ship and ocean engineering, including free-surface flows, breaking bow waves of high-speed ship, ship hull–propeller–rudder interaction, vortex-induced vibration of marine risers, VIMs of deep-draft platforms, and FOWTs, are discussed in detail. The applications of CFD techniques in numerical solutions of typical complex viscous flows in ship and ocean engineering were reviewed. With the developed CFD techniques, the complex viscous flows around ship and offshore structures can be highly resolved (as shown in the figures in each section).
However, the increase in computational cost is not negligible, and the computational efficiency has been a significant problem for further applications using CFD. The GPU acceleration technique has been widely used in CFD. The GPU technique has been used in many commercial software to accelerate the linear equation, and many groups developed GPU-based in-house codes (Chow et al. 2018; Chen and Wan 2018). Tremendous achievement has been made in accelerating GPU-based CFD computations. The Cartesian grid CFD solver (Liu and Hu 2018a, 2018b) is also preferable because of its high parallel efficiency. In addition, the Cartesian grid CFD technique shows high accuracy when incorporated with high-order schemes and adaptive mesh. With the application of these novel techniques, additional complex, real, and large-scale CFD simulations can be carried out in the future.
References
Antony A, Vinayan V, Holmes S, Spernjak D, Kim SJ, Halkyard J (2015) VIM study for deep draft column stabilized floaters. Offshore Technology Conference, Houston, pp 1–16
Bakica A, Gatin I, Vukčević V, Jasak H, Vladimir N (2019) Accurate assessment of ship-propulsion characteristics using CFD. Ocean Eng 175:149–162. https://doi.org/10.1016/j.oceaneng.2018.12.043
Bao Y, Palacios R, Graham M, Sherwin S (2016) Generalized thick strip modelling for vortex-induced vibration of long flexible cylinders. J Comput Phys 321:1079–1097. https://doi.org/10.1016/j.jcp.2016.05.062
Bekhit AS (2018) Numerical simulation of the ship self-propulsion prediction using body force method and fully discretized propeller model. IOP Conf Ser Mater Sci Eng 400:042004. https://doi.org/10.1088/1757-899X/400/4/042004
Bihs H, Kamath A (2017) A combined level set/ghost cell immersed boundary representation for floating body simulations. Int J Numer Methods Fluids 83:905–916. https://doi.org/10.1002/fld.4333
Bourguet R, Em Karniadakis G, Triantafyllou MS (2015) On the validity of the independence principle applied to the vortex-induced vibrations of a flexible cylinder inclined at 60°. J Fluids Struct 53:58–69. https://doi.org/10.1016/j.jfluidstructs.2014.09.005
Broglia R, Durante D (2017) Accurate prediction of complex free surface flow around a high speed craft using a single-phase level set method. Comput Mech 1–17. doi: https://doi.org/10.1007/s00466-017-1505-1
Broglia R, Dubbioso G, Durante D, Di Mascio A (2015) Turning ability analysis of a fully appended twin screw vessel by CFD. Part I: single rudder configuration. Ocean Eng 105:275–286. https://doi.org/10.1016/j.oceaneng.2015.06.031
Cao H, Wan DC (2014) Development of multidirectional nonlinear numerical wave tank by naoe-FOAM-SJTU solver. Int J Ocean Syst Eng 4:52–59
Cao H, Wan DC (2015) RANS-VOF solver for solitary wave run-up on a circular cylinder. China Ocean Eng 29:183–196
Cao H, Wan DC (2017) Benchmark computations of wave run-up on single cylinder and four cylinders by naoe-FOAM-SJTU solver. Appl Ocean Res 65:327–337. https://doi.org/10.1016/j.apor.2016.10.011
Carrica PM, Wilson RV, Noack RW, Stern F (2007) Ship motions using single-phase level set with dynamic overset grids. Comput Fluids 36:1415–1433. https://doi.org/10.1016/j.compfluid.2007.01.007
Carrica PM, Huang J, Noack R, Kaushik D, Smith B, Stern F (2010) Large-scale DES computations of the forward speed diffraction and pitch and heave problems for a surface combatant. Comput Fluids 39:1095–1111. https://doi.org/10.1016/j.compfluid.2010.02.002
Carrica PM, Ismail F, Hyman M, Bhushan S, Stern F (2012) Turn and zigzag maneuvers of a surface combatant using a URANS approach with dynamic overset grids. J Mar Sci Technol 18:166–181. https://doi.org/10.1007/s00773-012-0196-8
Chen CR, Chen HC (2016) Simulation of vortex-induced motions of a deep draft semi-submersible in current. Ocean Eng 118:107–116. https://doi.org/10.1016/j.oceaneng.2016.04.005
Chen ZS, Kim WJ (2010) Numerical investigation of vortex shedding and vortex-induced vibration for flexible riser models. Int J Nav Archit Ocean Eng 2:112–118. https://doi.org/10.2478/ijnaoe-2013-0026
Chen X, Wan DC (2018) Numerical simulation of three-dimensional violent free surface flows by GPU-based MPS method. Int J Comput Methods 1843012. doi: https://doi.org/10.1142/S0219876218430120
Chen W, Fu Y, Guo S (2017) Fluid-solid coupling and dynamic response of vortex-induced vibration of slender ocean cylinders. Adv Mech 47:25–91
Cheng P, Huang Y, Wan DC (2019) A numerical model for fully coupled aero-hydrodynamic analysis of floating offshore wind turbine. Ocean Eng 173:183–196. https://doi.org/10.1016/j.oceaneng.2018.12.021
Chow AD, Rogers BD, Lind SJ, Stansby PK (2018) Incompressible SPH (ISPH) with fast Poisson solver on a GPU. Comput Phys Commun 226:81–103. https://doi.org/10.1016/j.cpc.2018.01.005
Christensen DE, Bredmose H, Hansen AE (2005) Extreme wave forces and wave run-up on offshore wind turbine foundations. Copenhagen Offshore Wind 2005. Copenhagen, Denmark
Deshpande SS, Anumolu L, Trujillo MF (2012) Evaluating the performance of the two-phase flow solver interFoam. Comput Sci Discov 5:014016
Duanmu Y, Zou L, Wan DC (2017) Numerical simulations of vortex-induced vibrations of a flexible riser with different aspect ratiosin uniform and shear currents. J Hydrodyn Ser B 29:1010–1022. https://doi.org/10.1016/S1001-6058(16)60815-6
Duanmu Y, Zou L, Wan DC (2018) Numerical analysis of multi-modal vibrations of a vertical riser in step currents. Ocean Eng 152:428–442. https://doi.org/10.1016/j.oceaneng.2017.12.033
Dubbioso G, Durante D, Broglia R (2013) Zig-zag maneuver simulation by CFD for tanker like vessel. 5th International Conference on Computational Methods in Marine Engineering. Hamburg, 29-31
Dubbioso G, Durante D, Di Mascio A, Broglia R (2016) Turning ability analysis of a fully appended twin screw vessel by CFD. Part II: single vs. twin rudder configuration. Ocean Eng 117:259–271. https://doi.org/10.1016/j.oceaneng.2016.03.001
Dubbioso G, Muscari R, Ortolani F, Di Mascio A (2017) Analysis of propeller bearing loads by CFD. Part I: straight ahead and steady turning maneuvers. Ocean Eng 130:241–259. https://doi.org/10.1016/j.oceaneng.2016.12.004
Fu B, Wan DC (2017) Numerical study of vibrations of a vertical tension riser excited at the top end. J Ocean Eng Sci 2:268–278. https://doi.org/10.1016/j.joes.2017.09.001
Fu B, Zou L, Wan DC (2017) Numerical study on the effect of current profiles on vortex-induced vibrations in a top-tension riser. J Mar Sci Appl 16:473–479. https://doi.org/10.1007/s11804-017-1429-3
Fu B, Zou L, Wan DC (2018) Numerical study of vortex-induced vibrations of a flexible cylinder in an oscillatory flow. J Fluids Struct 77:170–181. https://doi.org/10.1016/j.jfluidstructs.2017.12.006
Gatin I, Vladimir N, Malenica Š, Jasak H (2019) Green sea loads in irregular waves with finite volume method. Ocean Eng 171:554–564. https://doi.org/10.1016/j.oceaneng.2018.10.061
Gonçalves RT, Rosetti GF, Fujarra ALC, Oliveira AC (2012) Experimental study on vortex-induced motions of a semi-submersible platform with four square columns, part I: effects of current incidence angle and hull appendages. Ocean Eng 54:150–169. https://doi.org/10.1016/j.oceaneng.2012.06.032
Gonçalves RT, Rosetti GF, Fujarra ALC, Oliveira AC (2013) Experimental study on vortex-induced motions of a semi-submersible platform with four square columns, part II: effects of surface waves, external damping and draft condition. Ocean Eng 62:10–24. https://doi.org/10.1016/j.oceaneng.2013.01.019
Harvie DJ, Fletcher DF (2000) A new volume of fluid advection algorithm: the stream scheme. J Comput Phys 162:1–32
Higuera P, Lara JL, Losada IJ (2013) Simulating coastal engineering processes with OpenFOAM®. Coast Eng 71:119–134. https://doi.org/10.1016/j.coastaleng.2012.06.002
Huang Y, Cheng P, Wan DC (2018) Numerical analysis on two floating offshore wind turbines with different layouts. In: The 9th International Conference on Computational Methods. Rome, Italy
Ii S, Xie B, Xiao F (2014) An interface capturing method with a continuous function: the THINC method on unstructured triangular and tetrahedral meshes. J Comput Phys 259:260–269. https://doi.org/10.1016/j.jcp.2013.11.034
Jacobsen NG, Fuhrman DR, Fredsøe J (2012) A wave generation toolbox for the open-source CFD library: OpenFoam®. Int J Numer Methods Fluids 70:1073–1088
Jasak H, Vukčević V, Gatin I, Lalović I (2018) CFD validation and grid sensitivity studies of full scale ship self propulsion. Int J Nav Archit Ocean Eng 11:33–43. https://doi.org/10.1016/j.ijnaoe.2017.12.004
Joshi V, Jaiman RK (2017) A variationally bounded scheme for delayed detached eddy simulation: application to vortex-induced vibration of offshore riser. Comput Fluids 157:84–111. https://doi.org/10.1016/j.compfluid.2017.08.013
Kara MC, Kaufmann J, Gordon R, Sharma PP, Lu JY (2016) Application of CFD for computing VIM of floating structures. Offshore Technology Conference, Houston, Texas, USA
Lam K, Jiang GD, Liu Y, So RMC (2006) Simulation of cross-flow-induced vibration of cylinder arrays by surface vorticity method. J Fluids Struct 22:1113–1131. https://doi.org/10.1016/j.jfluidstructs.2006.03.004
Li P, Cheng P, Wan DC, Xiao Q (2015) Numerical simulations of wake flows of floating offshore wind turbines by unsteady actuator line model. In: The 9th International Workshop on Ship and Marine Hydrodynamics, Glasgow, UK
Liu C, Hu C (2018a) An adaptive multi-moment FVM approach for incompressible flows. J Comput Phys 359:239–262. https://doi.org/10.1016/j.jcp.2018.01.006
Liu C, Hu C (2018b) Block-based adaptive mesh refinement for fluid–structure interactions in incompressible flows. Comput Phys Commun 232:104–123. https://doi.org/10.1016/j.cpc.2018.05.015
Liu Y, Xiao Q, Incecik A, Peyrard C, Wan DC (2017) Establishing a fully coupled CFD analysis tool for floating offshore wind turbines. Renew Energy 112:280–301. https://doi.org/10.1016/j.renene.2017.04.052
Marrone S, Colagrossi A, Antuono M, Lugni C, Tulin MP (2011) A 2D+t SPH model to study the breaking wave pattern generated by fast ships. J Fluids Struct 27:1199–1215. https://doi.org/10.1016/j.jfluidstructs.2011.08.003
Marrone S, Bouscasse B, Colagrossi A, Antuono M (2012) Study of ship wave breaking patterns using 3D parallel SPH simulations. Comput Fluids 69:54–66. https://doi.org/10.1016/j.compfluid.2012.08.008
Meneghini JR, Saltara F, de Fregonesi RA, Yamamoto CT, Casaprima E, Ferrari JA Jr (2004) Numerical simulations of VIV on long flexible cylinders immersed in complex flow fields. Eur J Mech B- Fluids 23:51–63. https://doi.org/10.1016/j.euromechflu.2003.09.006
Mikkelsen R, Sørensen JN, Øye S, Troldborg N (2007) Analysis of power enhancement for a row of wind turbines using the actuator line technique. J Phys Conf Ser 75:012044. https://doi.org/10.1088/1742-6596/75/1/012044
Mofidi A, Carrica PM (2014) Simulations of zigzag maneuvers for a container ship with direct moving rudder and propeller. Comput Fluids 96:191–203. https://doi.org/10.1016/j.compfluid.2014.03.017
Mofidi A, Martin JE, Carrica PM (2018) Propeller/rudder interaction with direct and coupled CFD/potential flow propeller approaches, and application to a zigzag manoeuvre. Ship Technol Res 65:10–31. https://doi.org/10.1080/09377255.2017.1399970
Mousaviraad SM, Wang Z, Stern F (2015) URANS studies of hydrodynamic performance and slamming loads on high-speed planing hulls in calm water and waves for deep and shallow conditions. Appl Ocean Res 51:222–240. https://doi.org/10.1016/j.apor.2015.04.007
Munir A, Zhao M, Wu H, Ning D, Lu L (2018a) Numerical investigation of the effect of plane boundary on two-degree-of-freedom of vortex-induced vibration of a circular cylinder in oscillatory flow. Ocean Eng 148:17–32. https://doi.org/10.1016/j.oceaneng.2017.11.022
Munir A, Zhao M, Wu H, Lu L, Ning D (2018b) Three-dimensional numerical investigation of vortex-induced vibration of a rotating circular cylinder in uniform flow. Phys Fluids 30:053602. https://doi.org/10.1063/1.5025238
Muscari R, Dubbioso G, Ortolani F, Di Mascio A (2017) Analysis of propeller bearing loads by CFD. Part II: transient maneuvers. Ocean Eng 146:217–233. https://doi.org/10.1016/j.oceaneng.2017.09.050
Muzaferija S (1999) A two-fluid Navier-Stokes solver to simulate water entry. In: Proceedings of 22nd symposium on naval architecture, 1999. National Academy Press, pp 638–651
Paulsen BT, Bredmose H, Bingham HB (2014) An efficient domain decomposition strategy for wave loads on surface piercing circular cylinders. Coast Eng 86:57–76. https://doi.org/10.1016/j.coastaleng.2014.01.006
Puckett EG, Almgren AS, Bell JB, Marcus DL, Rider WJ (1997) A high-order projection method for tracking fluid interfaces in variable density incompressible flows. J Comput Phys 130:269–282
Quallen S, Xing T, Carrica P, Li Y, Xu J (2013) CFD simulation of a floating offshore wind turbine system using a quasi-static crowfoot mooring-line model. In: The Twenty-third International Offshore and Polar Engineering Conference. Anchorage, Alaska
Rijken O (2014) Examining the effects of scale, mass ratios and column shapes on the vortex induced motion response of a semisubmersible through CFD analyses. In: ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering. American Society of Mechanical Engineers, San Francisco, California, USA, V002T08A028–V002T08A028
Roenby J, Bredmose H, Jasak H (2016) A computational method for sharp interface advection. R Soc Open Sci 3:160405. https://doi.org/10.1098/rsos.160405
Rusche H (2003) Computational fluid dynamics of dispersed two-phase flows at high phase fractions. Imperial College London (University of London)
Sadat-Hosseini H, Wu PC, Carrica PM, Kim H, Toda Y, Stern F (2013) CFD verification and validation of added resistance and motions of KVLCC2 with fixed and free surge in short and long head waves. Ocean Eng 59:240–273. https://doi.org/10.1016/j.oceaneng.2012.12.016
Sadat-Hosseini H, Kim D-H, Carrica PM, Rhee SH, Stern F (2016) URANS simulations for a flooded ship in calm water and regular beam waves. Ocean Eng 120:318–330. https://doi.org/10.1016/j.oceaneng.2016.02.019
Shen Z, Wan DC, Carrica PM (2015) Dynamic overset grids in OpenFOAM with application to KCS self-propulsion and maneuvering. Ocean Eng 108:287–306. https://doi.org/10.1016/j.oceaneng.2015.07.035
Shen X, Chen J, Hu P, Zhu X, Du Z (2018) Study of the unsteady aerodynamics of floating wind turbines. Energy 145:793–809
Tran TT, Kim D-H (2016) Fully coupled aero-hydrodynamic analysis of a semi-submersible FOWT using a dynamic fluid body interaction approach. Renew Energy 92:244–261
Tran TT, Kim D-H (2018) A CFD study of coupled aerodynamic-hydrodynamic loads on a semisubmersible floating offshore wind turbine. Wind Energy 21:70–85
Troldborg N, Larsen GC, Madsen HA, Hansen KS, Sørensen JN, Mikkelsen R (2011) Numerical simulations of wake interaction between two wind turbines at various inflow conditions. Wind Energy 14:859–876
Ubbink O, Issa RI (1999) A method for capturing sharp fluid interfaces on arbitrary meshes. J Comput Phys 153:26–50. https://doi.org/10.1006/jcph.1999.6276
Vandiver JK, Jaiswal V, Jhingran V (2009) Insights on vortex-induced, traveling waves on long risers. J Fluids Struct 25:641–653
Vukčević V, Jasak H, Gatin I (2017) Implementation of the ghost fluid method for free surface flows in polyhedral finite volume framework. Comput Fluids 153:1–19
Vukčević V, Roenby J, Gatin I, Jasak H (2018) A sharp free surface finite volume method applied to gravity wave flows. ArXiv Prepr ArXiv180401130
Waals OJ, Phadke AC, Bultema S (2007) Flow induced motions on multi column floaters. In: ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering. American Society of Mechanical Engineers, San Diego, California, USA, pp 669–678
Wang J, Wan DC (2018) CFD investigations of ship maneuvering in waves using naoe-FOAM-SJTU solver. J Mar Sci Appl 17:443–458. https://doi.org/10.1007/s11804-018-0042-4
Wang E, Xiao Q (2016) Numerical simulation of vortex-induced vibration of a vertical riser in uniform and linearly sheared currents. Ocean Eng 121:492–515
Wang Z, Yang J, Koo B, Stern F (2009) A coupled level set and volume-of-fluid method for sharp interface simulation of plunging breaking waves. Int J Multiph Flow 35:227–246. https://doi.org/10.1016/j.ijmultiphaseflow.2008.11.004
Wang J, Zou L, Wan DC (2017) CFD simulations of free running ship under course keeping control. Ocean Eng 141:450–464. https://doi.org/10.1016/j.oceaneng.2017.06.052
Wang J, Ren Z, Wan DC (2018a) RANS and DDES computations of high speed KRISO container ship. In: Proceedings of the 32nd Symposium on Naval Hydrodynamics. Hamburg, Germany
Wang J, Zou L, Wan DC (2018b) Numerical simulations of zigzag maneuver of free running ship in waves by RANS-Overset grid method. Ocean Eng 162:55–79. https://doi.org/10.1016/j.oceaneng.2018.05.021
Wang J, Zhao W, Wan DC (2019) Development of naoe-FOAM-SJTU solver based on OpenFOAM for marine hydrodynamics. J Hydrodyn 31:1–20
Wang J, Ren Z, Wan DC (2020) Study of a container ship with breaking waves at high Froude number using URANS and DDES methods. J Ship Res. https://doi.org/10.5957/JOSR.09180081
Wilson RV, Carrica PM, Stern F (2006) URANS simulations for a high-speed transom stern ship with breaking waves. Int J Comput Fluid Dyn 20:105–125. https://doi.org/10.1080/10618560600780916
Xiao F, Honma Y, Kono T (2005) A simple algebraic interface capturing scheme using hyperbolic tangent function. Int J Numer Methods Fluids 48:1023–1040. https://doi.org/10.1002/fld.975
Xie B, Xiao F (2017) Toward efficient and accurate interface capturing on arbitrary hybrid unstructured grids: the THINC method with quadratic surface representation and Gaussian quadrature. J Comput Phys 349:415–440
Xie B, Ii S, Ikebata A, Xiao F (2014a) A multi-moment finite volume method for incompressible Navier–Stokes equations on unstructured grids: volume-average/point-value formulation. J Comput Phys 277:138–162. https://doi.org/10.1016/j.jcp.2014.08.011
Xie B, Ii S, Xiao F (2014b) An efficient and accurate algebraic interface capturing method for unstructured grids in 2 and 3 dimensions: the THINC method with quadratic surface representation. Int J Numer Methods Fluids 76:1025–1042. https://doi.org/10.1002/fld.3968
Xie K, Zhao W, Wan DC (2017) naoe-FOAM-SJTU solver for numerical study of vortex-induced motions of a buoyancy can in currents. J Shipp Ocean Eng 6:223–232. https://doi.org/10.17265/2159-5879/2017.06.001
Yamamoto CT, Meneghini JR, Saltara F, Fregonesi RA, Ferrari JA Jr (2004) Numerical simulations of vortex-induced vibration on flexible cylinders. J Fluids Struct 19:467–489
Youngs DL (1982) Time-dependent multi-material flow with large fluid distortion. Numer Methods Fluid Dyn
Zhang Z, Zhao X, Xie B, Nie L (2019) High-fidelity simulation of regular waves based on multi-moment finite volume formulation and THINC method. Appl Ocean Res 87:81–94. https://doi.org/10.1016/j.apor.2019.03.007
Zhao W, Zou L, Wan DC, Hu Z (2018) Numerical investigation of vortex-induced motions of a paired-column semi-submersible in currents. Ocean Eng 164:272–283. https://doi.org/10.1016/j.oceaneng.2018.06.023
Funding
This study is supported by the National Natural Science Foundation of China (51809169, 51879159), Chang Jiang Scholars Program (T2014099), Shanghai Excellent Academic Leaders Program (17XD1402300), Innovative Special Project of Numerical Tank of Ministry of Industry and Information Technology of China (2016-23/09), and National Key Research and Development Program of China (2019YFB1704203, 2019YFC0312400).
Author information
Authors and Affiliations
Corresponding author
Additional information
Article Highlights
• CFD techniques for numerical simulations of typical complex flows in ship and ocean engineering are introduced.
• Numerical methods including interface capturing, overset grid, detached eddy simulation, and fluid–structure coupling are reviewed.
• Typical applications for complex flows in ship and ocean engineering using recent CFD techniques are demonstrated.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, J., Wan, D. Application Progress of Computational Fluid Dynamic Techniques for Complex Viscous Flows in Ship and Ocean Engineering. J. Marine. Sci. Appl. 19, 1–16 (2020). https://doi.org/10.1007/s11804-020-00124-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11804-020-00124-8