
Abstract
The notion of homotopy in the category of morphisms introduced by Górniewicz and Granas is proved to be equivalence relation which was not clear for years. Some simple properties are proved and a coincidence point index is described.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In [9] Górniewicz and Granas defined a convenient category which allows to treat fixed point problems for a broad class of multivalued maps as coincidence problems for single-valued maps. Their notion of morphisms is still the object of interest in various aspects (see, e.g., [1, 12, 16,17,18, 20, 21]). The aim of this paper is to define a homotopy notion and to check its basic properties in their category. In particular, we prove the transitivity property of the homotopy what seems new (comp. the remark before Lemma 3.4. in [1, p. 602]). Note that in some papers, a different notion of homotopy is considered [8, 13]. We prove some basic properties of the homotopy and also introduce a homotopy invariant—coincidence point index. This yields some known theorems on coincidence and fixed points (comp., e.g., [5, 7, 9, 14, 19, 24]).
The index was in fact defined in [5] for a broader class of multivalued maps but then it appeared to be a set of indices. Note that our notion of homotopy appears to be not the usual one in the case of single-valued maps. It seems to be closer to the homology relation. Nevertheless, it is satisfactory from the point of view of index theory.
2 The Górniewicz–Granas category of morphisms
By a space, we understand a Hausdorff topological space and by a map—a continuous transformation.
Definition 2.1
A map \(p: X \rightarrow Y\) is a Vietoris map provided
-
1.
p is onto and closed (an image of a closed set is a closed set),
-
2.
for each \(y\in Y\) \(p^{-1}(y)\) is a compact acyclic set (i.e., all its reduced Čech homology groups with rational coefficients are zero).
We will denote Vietoris maps by a double arrow \(p:X \Longrightarrow Y\). We make use of the following basic properties of them. Observe that Vietoris maps are proper maps (i.e., the preimage of a compact set is compact).
Theorem 2.2
(see [11, Ch. VI §19 Thm 3.2]) If \(p: X \Longrightarrow Y\) then the induced linear map \(p_*: H_*(X) \rightarrow H_*(Y)\) is an isomorphism. The composite of Vietoris maps is also a Vietoris map. The pullback of a Vietoris map is a Vietoris map.
We use the Čech homology theory with compact carriers here and thereafter.
Given two spaces X and Y, we consider the set of all diagrams of the form

Two such diagrams are said to be equivalent if there are maps \(f:Z\rightarrow Z'\) and \(g: Z'\rightarrow Z\) such that the following two diagrams commute

Clearly, this is an equivalence relation (see [9]). Let us note that in [8, 13] a different (more restrictive) relation is considered. The maps f, g are required to be homeomorphisms there.
Definition 2.3
([9]) An equivalence class of a diagram (p, q) with respect to the above relation is called a morphism and is denoted by

Given two morphisms

and

, we write a commutative diagram:

in which \(Z \boxtimes Z'=\{(z,z')\in Z \times Z';~q(z)=p'(z')\}, \bar{p}(z,z')=z\) and \(\bar{q}(z,z')=z'\). Then, we define the composite of \(\varphi \) and \(\psi \) to be a morphism

(\(\bar{p}\) is Vietoris being the pullback of \(p'\)). It is easy to check that the above definition is independent of the choice of representatives. The law of composition allows to regard the collection of morphisms on spaces as a category \(\mathcal {M}\). The category of usual single-valued maps regarded as morphisms of the form

is a subcategory of \(\mathcal {M}\). Górniewicz and Granas [9] established that the Čech homology functor extends to the category \(\mathcal {M}\).
One easily see that morphisms can be treated as multivalued maps. We define an image of a point as the set \(\varphi (x)=q\left( p^{-1}(x)\right) \) and it is obviously independent of the choice of representatives. We say that a morphism determines a multivalued map \(\varphi \). Such a map \(\varphi \) is upper-semicontinuous (see, e.g., [19] for a detailed but easy proof). A broad class of multivalued maps can be viewed in this way. A multivalued map \(\varphi : X \multimap Y \) is acyclic provided it is u.s.c. and the image of each point \(\varphi (x)\) is an acyclic compact set.
Proposition 2.4
A multivalued map \(\varphi : X \multimap Y\) is determined by a morphism if and only if it is a composition of acyclic maps.
Proof
Every acyclic map is determined by a morphism of the form

where \(\Gamma _\varphi \) is the graph of \(\varphi \), \(\Gamma _\varphi =\{(x,y)\in X \times Y;~y\in \varphi (x)\}\) and \(\pi _1, \pi _2\) are projections. Therefore, a composition of acyclic maps is determined by a composition of the above morphisms.
Now, given any morphism

it is sufficient to notice that a map \(\psi : X \rightarrow Z, \psi (x)=p^{-1}(x)\) is acyclic and \(\varphi \) is a composition \(\varphi =q\circ \psi \). \(\square \)
Remark 2.5
In [7], a broader class of admissible maps was considered. Those were maps admitting selections which were determined by morphisms.
Example
A multivalued map may be determined by different morphisms. Consider an acyclic map \(\widetilde{\varphi }:S^n\rightarrow S^n,\) \(\widetilde{\varphi }(x)=\left\{ y\in S^n;~\Vert y-x\Vert \le \frac{3}{2}\right\} \), where \(S^n=\{x\in {\mathbb {R}}^n;~\Vert x\Vert =1\}\).
It is determined by a morphism

Therefore, the square \(\varphi ^2=\varphi \circ \varphi \) determines a map \(\widetilde{\psi }: S^n\rightarrow S^n\), \(\widetilde{\psi }(x)=S^n\). But \(\widetilde{\psi }\) is also determined by any morphism of the form \(\psi ^2\),

where \(f:S^n\rightarrow S^n\) is a map of degree k.
It is easily seen that \(\varphi _*: H_*(S^n)\rightarrow H_*(S^n)\) is an identity isomorphism and so is \(\varphi _*^2\). But \(\psi _*\) is not an identity. Therefore, \(\varphi ^2\) and \(\psi ^2\) are different morphisms.
3 Homotopy of morphisms
There are various ways of defining a homotopy relation in the category \(\mathcal {M}\). We have chosen the one which seems to be the most straightforward and has been used by some authors (see, e.g., [1, 4, 7]), though it was not obvious whether it was an equivalence relation.
Definition 3.1
Two diagrams

are homotopic if there is a diagram

and maps \(f_0,f_1\) such that the following diagram commutes:

Here \(i_0(x)=(x,0)\), \(i_1(x)=(x,1)\).
Proposition 3.2
The homotopy relation is an equivalence relation in the set of diagrams from X to Y.
Proof
The only non-obvious property is the transitivity. Assume we have two commutative diagrams:

where \(i_k(x)=(x,k)\).
We have the mapping cylinders:
Now, we define a space \(K=Z_{f_1} \cup _{Z_1} Z_{f_2}\) which can be seen schematically in Fig. 1.

The space K
Define a map \(\tilde{p} : K \Longrightarrow X\times [-1,1]\) by a formula
and a map \(\tilde{q} : K \longrightarrow Y\) by
It follows immediately from the definition of K that \(\tilde{p}, \tilde{q}\) are correctly defined continuous maps. Moreover, \(\tilde{p}\) is a Vietoris map since the preimages of points are exactly the same as for \(p_1 \) whenever \(-1<t<1\), and for \( t=1, t=-1\) the maps \(\pi _1\circ p\) and \(\pi _1\circ \bar{p}\), which are Vietoris maps, respectively.

where \(\tilde{f}_0(x)=j\circ f_0(x), \tilde{f}_3(x)=\bar{j}\circ f_3(x),\) with inclusions \(j:Z \hookrightarrow K,\) \(\bar{j}:\bar{Z} \hookrightarrow K\). \(\square \)
Proposition 3.3
Assume that there exists a map \(f: Z\rightarrow Z'\) such that the following diagram commutes

Then, the diagrams


are homotopic.
Proof
It is sufficient to write a commutative diagram

where the maps are defined by formulas:
\(\bar{f}(x)=[f(x)], j(x)=x\). It is easily seen that \(\bar{p}, \bar{q}\) are well defined. \(\square \)
Definition 3.4
Two morphisms

are homotopic if there is a morphism

and maps \(f_0,f_1\) such that the following diagram commutes:

Here \(i_0(x)=(x,0)\), \(i_1(x)=(x,1)\).
The following proposition is an immediate consequence of Propositions 3.2 and 3.3:
Proposition 3.5
The definition 3.4 does not depend on the choice of representatives.
The following property is an immediate consequence of the definition of homotopy:
Proposition 3.6
Homotopic morphisms induce the same homology homomorphism.
Given three spaces X, Y, Z and maps \(\alpha : X \rightarrow Z, \beta : Y\rightarrow Z\) we denote by \( X \underset{\alpha , \beta }{\boxtimes } Y\) their fiber-product \( X \underset{\alpha , \beta }{\boxtimes } Y=\{(x,y)\in X\times Y;~~\alpha (x)=\beta (y)\}.\)
Proposition 3.7
Compositions of homotopic morphisms are also homotopic.
Proof
The proof is a diagram game. First, assume that

are homotopic and let

Define a morphism

where \(\widetilde{Z}=Z\times [0,1], \tilde{p}(x,t)=(p(x),t)\) and \( \tilde{q}(x,t)=(q(x),t).\) We can write the following commutative diagram

Here \(f(x,y)=((x,0),f_0(y)),~~ g(x,y)=((x,1),f_1(y))\), where \(f_i\) are the maps from the diagram defining a homotopy between \(\varphi _0\) and \(\varphi _1\) (see Def. 3.4), and \(\pi _1(x,y)=x, \pi _2(x,y)=y.\) One easily checks that the above diagram satisfies the conditions of 3.1 and thus the morphisms \(\varphi _0\circ \psi \) and \(\varphi _1\circ \psi \) are homotopic.
Now let \(\varphi _0, \varphi _1\) be as above and

Consider the following diagram:

where \(\pi _i\) are projections and \(\widetilde{f_i}(x,y)=(f_i(x),y) \). The above diagram defines a homotopy joining morphisms \(\psi \circ \varphi _0\) and \(\psi \circ \varphi _1\). Now we use the transitivity property of homotopy to end the proof. \(\square \)
4 Acyclic maps and homotopy of morphisms
As the Example 2 shows, different morphisms may determine the same multivalued map. In view of 3.6 these morphisms may even be not homotopic in general. The reason for it was the fact that the determined map in 2 was not acyclic.
Proposition 4.1
If \(\varphi : X \multimap Y\) is an acyclic map then every two morphisms which determine a selection of \(\varphi \), must be homotopic.
Proof
Consider the graph \(\Gamma _\varphi =\{(x,y)\in X\times Y;~~y\in \varphi (x)\}\) and maps \(p_\varphi (x,y)=x, q_\varphi (x,y)=y\). Then \(p_\varphi : \Gamma _\varphi \rightarrow X\) is a Vietoris map. Assume that

determines a selection of \(\varphi \) (i.e. for each \(x\in X\) we have an inclusion \(\psi (x)\subset \varphi (x)\)). Then we have a commutative diagram

where \(f(x)=(p(x),q(x))\). The assertion follows from 3.3. \(\square \)
Corollary 4.2
If two morphisms \(\varphi _0, \varphi _1 :X \rightarrow Y\) have a common acyclic support (i.e., an acyclic map such that \(\varphi _0, \varphi _1\) determine its selections) then, the induced homology homomorphisms are the same.
Proposition 4.3
There exist non-homotopic single-valued maps which are homotopic as morphisms.
Proof
It is enough to consider a space X which is acyclic but not contractible. Then, the identity map \(id: X \rightarrow X\) is not homotopic to any constant map \(y_0(x)=y_0\). But they are homotopic as morphisms since they are selections of the acyclic map \(\varphi :X\multimap X, \varphi (x)=X\).
5 A local coincidence index for morphisms
In [5], an index theory for a broad class of multi-valued maps including admissible maps as well some maps with non-connected images of points has been constructed (comp. [7], Ch. IV). It has been proved that such maps induce arbitrarily fine chain approximations on nerves of coverings in the sense of [22] (see [5, Thm 4.3]). Regarding a representative of a morphism

as a sequence of two acyclic maps \(p^{-1}\) and q there are chain maps induced by it. If X is a compact polyhedron and U is a polyhedral open subset of X such that \(x\not \in q(p^{-1}(x))\) for \(x\in \partial U\), an index of (p, q) can be defined to be a ’local Lefschetz number’ (comp. [5, 22]). It has been proved to be independent of the choice of approximation and representatives (since they are all homotopic). Therefore, the index \(i(X,\varphi , U)\) of a morphism \(\varphi \) is defined (see [5, Def. 5.6]) to be a rational number (more exactly, it is an element of the coefficient field). The definition can be extended in quite a routine way to the case of a morphism

where X is a metric ANR, \(\overline{\varphi (X)}\) compact and \(U\subset X\) an open set with \(x\not \in \varphi (x)\) for \(x\in \partial U\) (equivalently \(p(x)\not =q(x)\) for \(x\in p^{-1}(\partial U)\)). The detailed proofs can be found in [5].
Let \((K,\tau )\) be a compact polyhedron with a fixed triangulation \(\tau \). Its n-th barycentric subdivision is denoted by \(\tau ^n\). A subset \(U\subset K\) is polyhedral provided there is an integer l such that \(\tau ^l\) induces a triangulation of the closure \(\overline{U}\) of U in K.
Let l be a natural number and F a field. We denote by \(C_*(K,\tau ^l)\) the oriented chain complex \(C_*(K,\tau ^l; F)\). The carrier of \(c\in C_*(K,\tau )\) (carr c) is the smallest polyhedral subset \(X\subset K\) such that \(c\in C_*(X,\tau )\). By \(b: C_*(K,\tau )\rightarrow C_*(K,\tau ^l)\) we denote the subdivision chain mapping which maps each chain into its l-th barycentric subdivision.
By \( \chi :C_*(K,\tau ^l)\rightarrow C_*(K,\tau ) \), we denote a chain mapping which is induced by a simplicial approximation of the identity map \(id: (K,\tau ^l)\rightarrow (K,\tau )\). It is known that b and \(\chi \) are chain homotopy inverses to each other. In the context of approximations the notion of a closed star is useful. Let \(B\subset K\) be a subset. The k-th closed star of B in \((K,\tau )\) is defined inductively (simplices are closed here):
Let \(\Phi :(K,\tau ) \multimap (L,\mu )\) be an u.s.c. multivalued mapping.
Definition 5.1
Let k and l be two natural numbers.
A chain mapping \(\varphi : C_*(K,\tau ^l)\rightarrow C_*(L, \mu ^k)\) is called an (n, k)-approximation of \(\Phi \) provided the following conditions holds: for each simplex \(\sigma \in \tau ^l\), there exists a point \(y(\sigma )\in K\) such that
Definition 5.2
A graded set
where \(A(\Phi )_j\subset hom(C_*(K,\tau ^j), C_*(L,\mu ^j))\) is called an approximation system (A-system) for \(\Phi \) provided there is an integer \(n=n(A)\) such that:
-
(i)
If \(\varphi \in A(\Phi )_j\) then \(\varphi =\varphi _1\circ b\), where \(\varphi _1\) is an (n, j)-approximation of \(\Phi \).
-
(ii)
For every \(j\in {\mathbb {N}}\), there exists \(j_1\in {\mathbb {N}}\) such that for \(m\ge l \ge j_1\) and for all \(\varphi =\varphi _1\circ b\in A(\Phi )_l\) and \(\psi =\psi _1\circ b \in A(\Phi )_m\) the diagram
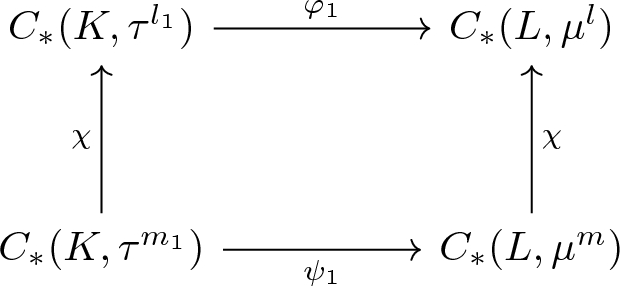
with \(m_1\ge l_1\) is homotopy commutative with a chain homotopy D satisfying the following smallness condition:
-
For any simplex \(\sigma \in \tau ^{m_1}\), there exists a point \(z(\sigma )\in K\) such that
$$\begin{aligned} \sigma \subset St^n(z(\sigma ),\tau ^j),~~~~carr~D\sigma \subset St^n(\Phi (z(\sigma )),\mu ^j). \end{aligned}$$
-

Definition 5.3
Let \(\Phi _1,\Phi _2: K\multimap L\) be u.s.c. maps and let \(H:K\times [0,1] \multimap L\) be an u.s.c. homotopy joining \(\Phi _1\) and \(\Phi _2\). Let \(A(\Phi _1)\) and \(A(\Phi _2)\) be A-systems for \(\Phi _1\) and \(\Phi _2\), respectively. They are H-homotopic provided there is an integer \(m\in {\mathbb {N}}\) such that the following condition holds:
-
(I)
For every \(j\in {\mathbb {N}}\), there is \(j_1\in {\mathbb {N}}\) such that for any \(l\ge j_1\) there are \(\varphi =\varphi _1\circ b\in A(\Phi _1)_l\) and \(\psi =\psi _1\circ b\in A(\Phi _2)_l\) such that \(\varphi _1, \psi _1: C_*(K,\tau ^{l_1}) \rightarrow C_*(L,\mu ^{l})\) are chain homotopic with an H-small homotopy D, i.e.:
-
(i)
For \(\sigma \in \tau ^{l_1}\) there is a point \(d(\sigma )\in K\) such that
$$\begin{aligned} \sigma \subset St^m(d(\sigma ),\tau ^{j}),~~~~carr~D\sigma \subset St^m (H(d(\sigma )\times [0,1]),\mu ^j). \end{aligned}$$
-
(i)
One can define an index for an A-system as follows: Let K be a compact polyhedron with a given triangulation \(\tau \) and let U be a polyhedral open subset of K (i.e., U is open and \(\bar{U}\) is a subpolyhedron of K). Let \(\Phi :\bar{U}\multimap K\) be such that \(x\notin \Phi (x)\) for \(x\in \partial U\), and let \(A=A(\Phi )\) be an A-system for \(\Phi \). Denote by \(p_U:C_*(K,\tau ^k)\rightarrow C_*(\bar{U},\tau ^k)\) the natural linear projection and let \(\varphi \in A(\Phi )_k\). We define a ’local Lefschetz number’
It has been proved in [22] that there exists sufficiently large \(k_0\) such that the above defined number does not depend on the choice of \(\varphi \in A(\Phi )_k, k\ge k_0\).
Thus, we can define the index properly.
Definition 5.4
\(i_A(K,\Phi , U) :=\lambda (p_U\circ \varphi )\) for \(\varphi \in A(\Phi )_k, k\ge k_0\).
Proposition 5.5
Properties of index:
-
(1)
(Additivity) Let \(U_1, U_2\) be open, disjoint and polyhedral subsets of U and \(\Phi : \bar{U} \rightarrow K\) an u.s.c. mapping such that \(\mathrm {Fix}(\Phi ) \subset U_1 \cup U_2\). If \(A(\Phi )\) is an A-system for \(\Phi \) then
$$\begin{aligned} i_A(K,\Phi ,U)=i_A(K,\Phi ,U_1)+i_A(K,\Phi ,U_2). \end{aligned}$$ -
(2)
(Excision) Let \(U_1\subset U\) be two open and polyhedral subsets of K and \(\mathrm {Fix}(\Phi )\subset U_1\). Then,
$$\begin{aligned} i_A(K,\Phi ,U)=i_A(K,\Phi ,U_1). \end{aligned}$$ -
(3)
(Homotopy invariance) Let \(H: \bar{U} \times [0,1]\rightarrow K\) be an u.s.c. homotopy such that \(x\not \in H(x,t)\) for \(x\in \partial U\) and \(t\in [0,1]\). Let \(A_0,A_1\) be H-homotopic A-systems for \(H_0=H(\cdot , 0)\) and \(H_1=H(\cdot , 1),\), respectively. Then,
$$\begin{aligned} i_{A_0}(K,H_0,U)=i_{A_1}(K,H_1,U). \end{aligned}$$ -
(4)
(Commutativity) Let \(W\subset K\) be open and let \(\Phi _1:K\rightarrow L, \Phi _2: L\rightarrow K\) be u.s.c. maps.
Assume that \(x\not \in \Phi _2\circ \Phi _1(x)\) for \(x\in \partial W\) and \(y\not \in \Phi _1 \circ \Phi _2(y)\) for \(y\in \partial (\Phi _2^{-1}(W))\). Assume further that if \(y\in \mathrm {Fix}(\Phi _1\circ \Phi _2)\setminus \Phi _2^{-1}(W)\) then \(\Phi _2(y)\cap \mathrm {Fix}(\Phi _2\circ \Phi _1){\Big |}_{\bar{W}}=\emptyset \). Then for any A-systems \(A_1=A(\Phi _1),\) \(A_2=A(\Phi _2)\)
$$\begin{aligned} i_{A_1\circ A_2}(L,\Phi _1\circ \Phi _2,\Phi _2^{-1}(W))=i_{A_2\circ A_1}(K,\Phi _2\circ \Phi _1,W). \end{aligned}$$ -
(5)
(Mod-p property) Let the coefficient field \(F={\mathbb {Z}}_p, p\) prime. Let \(W\subset K\) be open and \(\Phi :K \rightarrow K\) an u.s.c. map such that \(x\not \in \Phi ^p(x)\) for \(x\in \partial W\). Assume that if \(y\in \mathrm {Fix}(\Phi ^p)\setminus W\) then \(\Phi ^k(y)\cap \mathrm {Fix}(\Phi ^p){\Big |}_{\bar{W}}=\emptyset \) for \(k<p\). Then
$$\begin{aligned} i_A(K,\Phi ,W)=i_{A^p}(K,\Phi ^p,W). \end{aligned}$$
Remark 5.6
Because of Prop. 5.5(2), one can also define the index \(i_A(K,\Phi ,V),\) when V is open and not polyhedral, if \(\Phi : L\rightarrow K, V\subset L \subset K,\) and L is a subpolyhedron of K. Then one puts
where \(U\subset V\) is polyhedral and \(\mathrm {Fix}(\Phi ){\Big |}_{\bar{V}}\subset U\).
The existence of an A-system for maps determined by morphisms was proved in fact in [5], where more general maps were considered. Recall that we can associate an abstract simplicial complex with a locally finite covering \(\alpha \) of a given space X, called its’ nerve \(N(\alpha )\). Simplices of \(N(\alpha )\) are the nonempty intersections of the sets \(V_i \in \alpha \). We denote the support of a simplex \(s\in N(\alpha )\) as the union of the forming sets (vertices). Similarly we define the star of a set as the union of all simplices intersecting it. We denote by \(N^{n}(\alpha )\) the n-dimensional skeleton of the nerve. Let X, Y be compact spaces. By CovX, CovY we denote the sets of finite open coverings of these spaces, respectively.
Definition 5.7
Let \(\alpha , \bar{\alpha }\in Cov X,\) \(\beta ,\) \(\bar{\beta }\in Cov Y\) and let \(\Phi :X\multimap Y\).
A chain map \(\varphi : C_*(N^{n}(\bar{\alpha }))\rightarrow C_*(N^{n}(\bar{\beta }))\) is called an \((\alpha , \beta )\)-approximation of \(\Phi \) provided: for every simplex \(s\in N^{n}(\bar{\alpha })\) there exists a point \(p(s)\in X\) such that
The following basic approximation result is a special case of Theorem 4.3 in [5]:
Theorem 5.8
Let \(\Phi :X\multimap Y\) be an acyclic-valued u.s.c. map of compact spaces, and \(\alpha \in Cov X, \beta \in Cov Y\). Then for every \(n\in \mathbb {N}\), there exist: a refinement \(\bar{\alpha }\) of \(\alpha \) and an \((\alpha , \beta )\)- approximation \(\varphi :C_*(N^{n}(\bar{\alpha }))\rightarrow C_*(N^{n}(\beta ))\) of \(\Phi \).
Recall that given a morphism

, the map \(p^{-1}:X\multimap Z\) is u.s.c. and acyclic, and Theorem 5.8 applies. Thus, we can formulate
Proposition 5.9
If \((K,\tau ),(L,\mu )\) are compact polyhedra and

is a morphism, then the compositions of chain approximations of \(p^{-1}\) and q form an A-system.
Proof
Let us recall that given a triangulation \(\tau \), we can associate an open covering \(\alpha (\tau )\) by the sets \( st(v,\tau )= Int (St(v,\tau )),\) where v are vertices of the triangulation. The simplicial maps \( \theta :(K,\tau )\rightarrow N(\alpha (\tau )), \lambda : N(\alpha (\tau ))\rightarrow (K,\tau )\) defined on vertices by \(\theta (v):=st(v,\tau ) \), and \( \lambda (st(v,\tau )):=v\), define a natural simplicial isomorphism. The same is true for \((L,\mu )\). Considering barycentric subdivisions of the triangulation \(\tau \) we obtain arbitrarily fine refinements of \(\alpha (\tau ))\). It has been detailly proved that the compositions of sufficiently close chain approximations: \(\psi _2\) of the acyclic map \(p^{-1}\) and \(\psi _1\) of the single-valued map q are chain homotopic (see [5, Prop. 4.8 and 4.14], [8, Prop. 50.30 and 50.39]).
Therefore, the compositions of the form \(\lambda \circ \psi _1 \circ \psi _2 \circ \theta \circ b\) form an A-system for the given morphism \(\varphi \). The map b is the standard subdivision map (see [23]) and \(\lambda , \theta \) are the above isomorphisms for barycentric subdivisions \(\tau ^k, \mu ^k\). \(\square \)
Let now U be an open polyhedral subset of a compact polyhedron \((K,\tau )\) (i.e. \(\overline{U}\) is a subpolyhedron) and let \(\varphi :\overline{U}\rightarrow K\) be a morphism such that \(x\notin \varphi (x)\) (equivalently \(p(y)\not =q(y)\) for \(y\in p^{-1}(\partial U\)) for the representatives).
Then, we define
By localization property, we do not need to assume that U is polyhedral.
Now let X be a compact metric ANR, \(U\subset X\) open and let \(\varphi : \overline{U}\rightarrow X\) be a morphism such that \(\mathrm {Fix}~\varphi \cap \partial U = \emptyset \). Then, there exists a finite polyhedron K \(\varepsilon \)-dominating X with \(\varepsilon >0\) smaller than the distance of \(\mathrm {Fix}\varphi \) from \(\partial U\) (see [3, p. 41]). Denoting the maps \(r:K\rightarrow X\), \(s: X\rightarrow K\) (\(r\circ s=id_X, d(s\circ r(x),x)<\varepsilon \)), we define the index as follows:
Independent of the choice of K, r, s is detailly proved in [5], and [8, Sect. IV.52].
The next step is to extend the definition of the index to the case of arbitrary ANRs. By the Arens–Eells embedding Theorem (see, e.g., [8, Thm 1.6]) we can assume that X is a closed subset of a normed space E. Since X is an ANR, there is an open subset \(V\subset E\) and a retraction \(r:V\rightarrow X\). Consider a compact morphism

such that \(\overline{q(Z)}\) is compact, and \(p(z)\not = q(z)\) for \(p(z)\in \partial U\). Denoting by \(i:X\rightarrow V\) the inclusion map we define a morphism \(\psi =i\circ \varphi \circ r:U'= r^{-1}(\overline{U})\rightarrow V\). One easily checks that \(\mathrm {Fix}\psi \cap r^{-1}(\partial U)=\emptyset \). By the result of J. Girolo [6] there exists a compact ANR K such that \( \overline{\psi (U')} \subset K \subset V\). We let \(W=K\cap r^{-1}(U)\) and then the index \(i(K, \psi {\Big |}_{K}, W) \) is well defined as above.
Thus, we define
Theorem 5.10
([5, Prop. 7.5]) The index has the following properties:
-
1.
Additivity. If \(U_1,U_2\subset U\) are open and disjoint and if \(\mathrm {Fix}~ \varphi {\Big |}_{\overline{U}}\subset U_1\cup U_2\) then \(i(X,\varphi , U)=i(X,\varphi , U_1)+i(X,\varphi , U_2)\).
-
2.
Homotopy invariance. Assume that the morphisms \(\varphi , \psi :X \rightarrow X\) are homotopic by a homotopy such that for its representatives holds \(x\not \in q(p^{-1}(x,t))\) whenever \(x\in \partial U\). Then \(i(X,\varphi , U)=i(X,\psi , U)\).
-
3.
Normalization. If \(\Lambda (\varphi _*)\) denotes the (generalized) Lefschetz number of the induced homology homomorphism then \(i(X,\varphi , X)=\Lambda (\varphi _*)\).
-
4.
Commutativity. Let \(W\subset X\) be open and \(\varphi : X\rightarrow Y\), \(\psi : Y \rightarrow X\) be morphisms. Assume that \(x\not \in \psi \circ \varphi (x)\) for \(x\in \partial W\) and \(y\not \in \varphi \circ \psi (y)\) for \(y\in \partial (\psi ^{-1}(W))\) and moreover \(\psi (\mathrm {Fix}~\varphi \circ \psi - \psi ^{-1}(W))\cap \mathrm {Fix}~\psi \circ \varphi {\Big |}_{\overline{W}}=\emptyset \). Then \(i(X,\psi \circ \varphi , W)=i(Y, \varphi \circ \psi , \psi ^{-1}(W))\).
Corollary 5.11
If \(i(X,\varphi ,U)\not =0\) then the determined map has a fixed point in U (or equivalently any representative

has a coincidence in \(p^{-1}(U)\)).
Corollary 5.12
If \(Y\subset X\) is an ANR and \(\varphi (\overline{U})\subset Y\), then
The first corollary is a consequence of additivity and the last one of commutativity (see. Thm 5.10).
Now, we prove a generalization of the well-known nonlinear alternative (comp. [11, II.6, Thm 5.2]) from which one can derive many fixed point or coincidence results. We omit the corollaries since they are routine (comp. [4, 7, 11]).
Theorem 5.13
Let C be a convex subset of a normed space E and U an open set in C containing 0. Then for any morphism

one of the following conditions is satisfied:
-
(i)
\(\varphi \) has a fixed point in \(\overline{U}\),
-
(ii)
for some \(x\in \partial U\) and \(0<t<1\) there is \(y\in p^{-1}(x)\) such that \(x=t\cdot q(y)\).
Proof
Consider the following commutative diagram

where \(\bar{p}(x,t)=(p(x),t),\) \(\bar{q}(x,t)=t\cdot q(x),\) \(0(x)=0,\) \(f(x)=(x,0)\) and \(g(x)=(x,1)\). Denoting by \(\psi \) the morphism defined by (p, 0) we observe that \(i(C,\psi , U)=1\) since \(0\in U\) and it is a constant map \(x\mapsto 0\). If \(\varphi \) has a fixed point in U then we are done. If not and if moreover (ii) is not satisfied that means exactly that assumptions of homotopy invariance (Thm 5.10) are fulfilled. Therefore, \(i(C,\varphi ,U)=1\) and \(\varphi \) has a fixed point in U by Cor. 5.11. \(\square \)
Remark 5.14
We assumed in this section that the considered morphisms determined compact maps, but one can extend all the results to some non-compact maps. We touched the example of compact attraction maps in [5]. The classes of condensing morphisms mentioned in [15] (comp. [24]) may be also included into the theory.
Remark 5.15
The index is a priori a rational number but there are no examples where it is not an integer. Moreover, in [2], it was proved that in the case of acyclic maps of ENR-s, the index is an integer and the theory is unique.
6 Extending morphisms from a sphere
In this short section, we prove one extremely simple geometric result which analog for single-valued maps is an exercise (see, e.g., [11, Thm II.5.1]). We say a morphism is nullhomotopic provided it is homotopic to a morphism

where \(y_0(x)=y_0\) is any constant map.
Proposition 6.1
A morphism

is nullhomotopic if and only if \(\varphi \) is extendable to a morphism \(\Phi :D^{n+1}\rightarrow Y\) in the unit disc.
Proof
Assume \(\varphi \) is nullhomotopic, i.e., we have a diagram

We define a morphism \(\Phi :D^{n+1}\rightarrow Y\). Let K be a space obtained from the disjoint sum of three spaces \(Z\times [0,1], \bar{Z}, S^n\times [0,1] \cup D^{n+1}\times \{0\}\) by the following relations: if \(x\in Z\) then \((x, 0)\sim f_1(x)\), and if \(x\in S^n\) then \((x, 1)\sim f_0(x)\) (see Fig. 2 for a sketch).

A sketch of K
Define a map \(\tilde{p}: K\Longrightarrow D^{n+1}\) by the formula
where \(g: S^n\times [0,1]\rightarrow D^{n+1}, g(x,t)=\frac{1}{4}(2+t)x\).
A map \(\tilde{q}: K \rightarrow Y\) is defined by the formula
It is easily seen that p is a Vietoris map, and moreover
Hence a morphism

is an extension of \(\varphi \).
Conversely, assume we have a morphism

There is a map \(g: S^n\times [0,1]\rightarrow D^{n+1}\) given by
Define a space \(K=\{(x,t,y,z)\in S^n\times [0,1]\times D^{n+1}\times \bar{Z};~~y=g(x,t)=\bar{p}(z)\}\). Then we have a commutative diagram

Here \(Z = \bar{p}^{-1}(S^n\times \{1\}), \) \(\tilde{p}(x,t,y,z)=(x,t),\) \( \tilde{q}(x,t,y,z)=\bar{q}(z), \) \(f(x)=\)
\(=(\bar{p}(x), 1,\bar{p}(x), x), \) \(h(x)=(x,0,0,y_0)\), where \(y_0\) is any point in \(\bar{p}^{-1}(0)\) and \(z_0=q(y_0)\), and p, q are restrictions of \(\bar{p}, \bar{q}\). The diagram proves that

is a morphism homotopic to a constant map. \(\square \)
Combining Propositions 6.1 together with 4.3, we obtain:
Corollary 6.2
If Y is an acyclic space with \(\pi _n(Y)\ne 0\) then there exists a single-valued map \(f: S^n \rightarrow Y\) such that f is not extendable to \(D^{n+1}\) as a map but it is extendable as a morphism (there is a multivalued extension).
The results of this section suggest that one can extend theorems concerning essential maps of [11, Ch. II]. A version of this approach can be found in [16,17,18].
References
Andres, J.: On the coexistence of irreducible orbits of coincidences for multivalued admissible maps on the circle via Nielsen theory Topol. Appl. 221, 596–609 (2017)
Bielawski, R.: The fixed point index for acyclic maps on ENR-s Bull. Pol. Acad. Sci. 35, 487–499 (1987)
Brown, R.F.: The Lefschetz Fixed Point Theorem Scott. Foresman and Co. Glenview III, London (1971)
Dzedzej, Z.: Degree of coincidence in locally convex spaces Coll. Math. Soc. Janos Bolyai 23, Topology, Budapest (1978), 377-395
Dzedzej, Z.: Fixed point index theory for a class of nonacyclic multivalued maps Dissert. Math. 253, 1–58 (1985)
Girolo, J.: Approximating compact sets in normed linear spaces Pacific. J. Math. 98, 81–89 (1982)
Górniewicz, L.: Homological methods in fixed point theory of mulivalued maps Dissert. Math. 129, 1–71 (1976)
Górniewicz, L.: Topological Fixed Point Theory of Multivalued Mappings, 2nd edn. Springer, Dortrech (2006)
Górniewicz, L., Granas, A.: Some general theorems in coincidence theory I. J. Math. Pures et Appl. 60, 361–373 (1981)
Granas, A.: Sur la methode de continuité de Poincaré C. R. Acad. Sci Paris 282, 978–985 (1976)
Granas, A., Dugundji, J.: Fixed Point Theory. Springer, New York (2003)
Hara, Y., Moriwaki, Y.: The degree of multivalued maps from manifolds to spheres. J. Fixed Point Theory Appl. 11, 253–259 (2012)
Kryszewski, W.: Topological and approximation methods of degree theory of set-valued maps Dissert. Math. 336, 1–101 (1994)
Kucharski, Z.: A coincidence index Bull. Acad. Polon. Sci. 24, 245–252 (1976)
Nussbaum, R.: Generalizing the fixed point index Math. Ann. 228, 259–278 (1977)
O’Regan, D.: Coincidence theory for compact morphisms Fixed Point Theory Appl. 19, (2017)
O’Regan, D.: Coincidence for morphisms based on compactness conditions on countable sets. Appl. Math. Comput. 339, 59–62 (2018)
O’Regan, D.: Coincidence for morphisms based on compactness principles. J. Nonlinear Sci. Appl. 11, 1096–1098 (2018)
Segiet, W.: Local coincidence index for morphisms Bull. Acad. Polon. Sci. 30, 261–267 (1982)
Shitanda, Y.: The degree of set-valued mappings from ANR spaces to homology spheres Math. J. Okayama Univ. 59, 27–40 (2017)
Shitanda, Y.: A generalization of antipodal point theorems for set-valued mappings. Hokkaido Math. J. 20(3), 217–238 (2010)
Siegberg, H.W., Skordev, G.: Fixed point index and chain approximations. Pacific J. Math. 102, 455–486 (1982)
Spanier, E.H.: Algebraic Topology. McGraw-Hill, New York (1966)
Violette, D., Fournier, G.: A fixed point index for compositions of acyclic multivalued maps in Banach space (in French) Ann. Sci. Math. Québec 22(2), 225–244 (1998)
Acknowledgements
We are grateful to Anonymous Reviewer for very careful reading of the manuscript and many constructive remarks.
Author information
Authors and Affiliations
Corresponding author
Additional information
To the memory of A. Granas.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Dzedzej, Z., Gzella, T. On homotopies of morphisms and admissible mappings. J. Fixed Point Theory Appl. 22, 91 (2020). https://doi.org/10.1007/s11784-020-00824-2
Accepted:
Published:
DOI: https://doi.org/10.1007/s11784-020-00824-2