
Abstract
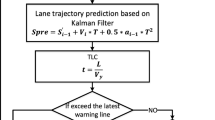
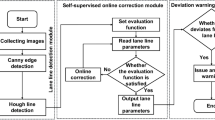
A technology for unintended lane departure warning was proposed. As crucial information, lane boundaries were detected based on principal component analysis of grayscale distribution in search bars of given number and then each search bar was tracked using Kalman filter between frames. The lane detection performance was evaluated and demonstrated in ways of receiver operating characteristic, dice similarity coefficient and real-time performance. For lane departure detection, a lane departure risk evaluation model based on lasting time and frequency was effectively executed on the ARM-based platform. Experimental results indicate that the algorithm generates satisfactory lane detection results under different traffic and lighting conditions, and the proposed warning mechanism sends effective warning signals, avoiding most false warning.
Similar content being viewed by others

References
JEFFREY D, ANTHONY G. Autonomous driving-A practical roadmap [C]// 2010 SAE Convergence, Detroit, Michigan, United States: SAE, 2010: 1–22.
AMOL B, MONSON H, MARK T. A novel lane detection system with efficient ground truth generation [J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 365–374.
STEPHAN S, SARATH K, ALEN A, GAMINI D. Robust lane detection in urban environments [C]// Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, CA, USA: IEEE Press, 2007: 123–128.
MOHAMED A. Real time detection of lane markers in urban streets [C]// IEEE Intelligent Vehicles Symposium. Eindhoven, The Netherlands: IEEE Press, 2008: 7–12.
HSIAO P, YEH C, HUANG S, FU L. A portable vision-based real-time lane departure warning system: day and night [J]. IEEE Transactions on Vehicular Technology, 2009, 58(4): 2089–2094.
JUNG C, KELBER C. Lane following and lane departure using a linear-parabolic model [J]. Image and Vision Computing, 2005, 23: 1192–1202.
LIU Xin, XU Xin, DAI Bin. Vision-based long-distance lane perception and front vehicle location for full autonomous vehicles on high roads [J]. Journal of Central South University, 2012, 19: 1454–1465.
JOEL C, MOHAN M. Video-based lane estimation and tracking for driver assistance: Survey, system, and evaluation [J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(1): 20–37.
WANG Y, NAIM D, ALIN A. A novel system for robust lane detection and tracking [J]. Signal Processing, 2012, 92: 319–334.
WANG J, LIN C, CHEN S. Applying fuzzy method to vision-based lane detection and departure warning system [J]. Expert Systems with Applications, 2010, 37: 113–126.
CHENG H, JENG B, TSENG P, FAN K. Lane detection with moving vehicles in the traffic scenes [J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 571–582.
MA Chao, XIE Mei. A method for lane detection based on color clustering [C]// 2010 Third International Conference on Knowledge Discovery and Data Mining. Phuket, Tailand: IEEE Press, 2010: 200–203.
BUI T, NOBUYAMA E. A local soft voting method for texture-based vanishing point detection from unstructured road images [C]// SICE Annual Conference. Akita, Japan: SICE, 2012: 396–401.
RASMUSSEN C, KORAH T. On-vehicle and aerial texture analysis for vision-based desert road following [C]// Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). San Diego, CA, USA: IEEE Press, 2005: 1063–6919.
RODOLFO T, MIGUEL T. A comparison of gradient versus color and texture analysis for lane detection and tracking [C]// The 6th Robotics Symposium in Latin American (LARS). Valparaiso, Chile: IEEE Press, 2006: 1–6.
MANISH H, LIU J, JOHN F. Image texture analysis: Methods and comparisons [J] Chemometrics and Intelligent Laboratory Systems, 2004, 72: 57–71.
LEE J. A machine vision system for lane-departure detection [J]. Computer Vision and Image Understanding, 2002, 86: 52–78.
JUNG C, KELBER C. A lane departure warning system using lateral warning using un-calibrated camera [C]// The 8th International IEEE Conference on Intelligent Transportation Systems. Vienna, Austria: IEEE Press, 2005: 348–353.
XU X, XU S, JIN L, SONG E. Characteristic analysis of Otsu threshold and its applications [J]. Pattern Recognition Letters, 2011, 32: 956–961.
POLLARD E, GRUYER D, TAREL J, IENG S, CORD A. Lane marking extraction with combination strategy and comparative evaluation on synthetic and camera images [C]// The 14th International IEEE Conference on Intelligent Transportation Systems. Washington, DC, USA: IEEE Press, 2011: 1741–1746.
VEIT T J, NICDLLE P. ROMA (ROadMAkings). [EB/OL]. http://www.lcpc.fr/francais/produits/bases-de-donnees-de-reference/article/roma-road-markings
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item: Project(51175159) supported by the National Natural Science Foundation of China; Project(2013WK3024) supported by the Science and Technology Planning Program of Hunan Province, China; Project(CX2013B146) supported by the Hunan Provincial Innovation Foundation for Postgraduate, China
Rights and permissions
About this article

Cite this article
Zhang, Ww., Song, Xl. & Zhang, Gx. Real-time lane departure warning system based on principal component analysis of grayscale distribution and risk evaluation model. J. Cent. South Univ. 21, 1633–1642 (2014). https://doi.org/10.1007/s11771-014-2105-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11771-014-2105-2