
Abstract
Based on a nonlinear flight dynamic model with aerodynamic coefficients and external disturbance uncertainties, which is a typical cyber physical system, a filtering backstepping terminal sliding mode control method is proposed for a robust controller. The tracking differentiator can provide the capability of solving the problem of “complexity explosion” in backstepping controllers to simplify the backstepping implementation. Nonlinear disturbance observers are used to observe the uncertainties of the nonlinear flight dynamic system. The terminal sliding mode controller is designed to improve its convergence rate and the tracking accuracy. Finally, nonlinear 6-degree-of-freedom simulation results for an F-16 aircraft model elaborate the effectiveness of the proposed control system.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In recent years, cyber-physical systems, which consist of physical and computational components, have drawn considerable attention[1]. The fact that computation, communication and control (3C) are now highly integrated in the concept of cyber-physical system (CPS). A typical CPS has the capabilities of sensing, controlling and communication, which can reflect the interaction and coordination between the physical and computational elements. Therefore, the design of control strategy in CPS is of crucial importance for stabilization and efficiency of system dynamics. CPS can be found in aerospace, automotive, transportation, infrastructure management and environmental monitoring [2, 3]. An important application of CPS is the flight control system[4]. And the efficacy of the control law will decide whether the CPS can bring its predominance into play or not[5].
Due to the unmodeled dynamics and external disturbances, the flight control system is a typical uncertain nonlinear system. Recently, adaptive backstepping design method has become an important method for the research of dealing with uncertainties[6–8]. A drawback of the conventional backstepping method may cause the problem of complexity resulting from the repeated differentiations[9]. Dynamic surface control (DSC) technique could solve the complexity problem in backstepping design method by introducing a first-order filter of the synthetic input at each step of the traditional backstepping design procedure[10]. Sliding mode control (SMC) has better robustness against the parameter uncertainties[11–13]. In [11, 12], SMC was proposed for the full envelop of the aircraft model with parameter uncertainties. The combination of SMC and adaptive backstepping control benefits from both approaches. The role of SMC is to achieve more robustness to disturbances and uncertainties[14]. However, unwanted chattering in the conventional sliding surface makes adaptive backstepping SMC unsuitable for high accuracy requirement. There are many methods which can be employed to reduce chattering such as integral sliding surface[15], high-order SMC[16] and dynamic SMC[17]. High-order sliding mode controllers can also be used to improve the system responses.
In this paper, the flight control CPS with aerodynamic coefficients and external disturbances is studied by adaptive backstepping SMC. The tracking differentiator is used to reduce the complexity of the computation. Nonlinear disturbance observer (NDO) is used to observe the uncertainties to compensate the control inputs[18, 19]. The highorder sliding mode control law is deigned to eliminate the chattering and improve the system response time. Simulation examples are given to illustrate the effectiveness of the proposed methods.
Nomenclature.
-
F: Aerodynamic forces about the body-fixed frame
-
L, M, N: Aerodynamic rolling, pitching, yawing moments
-
I: Moment of inertia
-
p, q, r: Roll, pitch, yaw rates about the body-fixed frame
-
\(\bar q\): Dynamic pressure
-
m: Aircraft mass
-
T: Thrust
-
S: Reference wing area
-
C*: Non-dimensional aerodynamic coefficient
-
V: Velocity
-
α, β: Angle of attack, sideslip angle
-
δ e , δ a , δ r : Elevator, aileron, rudder angles
-
ϕ, θ, ψ: Roll, pith, yaw angles
2 Problem statement
The body-fixed nonlinear equations of motion for an F-16 aircraft with external uncertainties and aerodynamic coefficients can be written as[20]
x1 = [α, β, ϕ]T, x2 = [p, q, r]T, x3 = [θ, ψ]T,u = [δ e , δ a , δ r ]T. And the expressions of f1, g1, f2, g2, f3, h are the same as given in [20].
M i represents the compound uncertainties in the model. Δf, Δg and Δh represent the aerodynamic coefficients, d(t) is the external uncertainty. h represents the aerodynamic force component caused by the control surface deflection. It is seen as one part of the model uncertainties M1. The task of the controller to be designed is to track the commands of α, β and ϕ. Assumption 1 is used in the design and analysis process.
-
Assumption 1. The desired trajectory y c = [α c , β c , ϕ c ]T is bounded, namely
$$\left\Vert {[{y_c},{{\dot y}_c},{{\ddot y}_c}]} \right\Vert \leq {c_0}$$where c0 ∈ R is a known positive constant and ∥·∥ denotes the 2-norm of a vector or a matrix.
Lemmas 1 and 2 are used in the design and analysis process.
-
Lemma 1. There exist positive constants α m , β m and θ m ∈ R such that the magnitudes and derivatives of f1, f2, g1 and g2 are bounded for all α, β and θ ∈ R satisfying ∣α∣ ≤ α m and ∣β∣ ≤ β m . Furthermore, there exist g i 0 and g i 1 such that 0 < g i 0 ≤∥g i ∥ ≤ g i 1, i = 1, 2.
-
Lemma 2. There exist two arbitrary vectors x, y ∈ Rn satisfying
$${x^{\rm{T}}}y \leq {{{\varepsilon ^p}} \over p}{\left\Vert x \right\Vert ^p} + {1 \over {q{\varepsilon ^q}}} + {\left\Vert y \right\Vert ^q}$$ε > 0, p > 1, q > 1 and (p − 1)(q − 1) = 1. When p = q = 2 and e2 =2, there exist x, y ∈ Rn such that xTy ≤∥x∥2 + ∥y∥2.
3 Controller design and stability analysis
3.1 Tracking differential filter
The derivative of the virtual control signal obtained through the filter can effectively reduce the amount of calculation in the backstepping control. The classical differential filter has amplification effect on noises. Nonlinear tracking differentiator (NTD) can overcome the drawback when it is used to simplify the calculation. Its expression is written as[21]
where v0(t) is the input signal, y1 is the tracking signal, y2 is the approximate differential signal of v0(t), sat(x, δ) is the saturation function, i.e.,
γ > 0, and the value of γ determines the tracking speed of NTD. From (2), the following equality is satisfied when v0(t) is bounded and γ is sufficiently large
with T > 0. We can know that NTD does not affect the convergence of the tracking error of the control system[22]. And y2 is obtained by integrating the differential signal, which can effectively avoid the influence of noise.
3.2 Controller design
Define the tracking error of the states in the control system
where x1c = y c , x2c is the expected virtual input of the inner loop. The derivative of e1 is
NDO is adopted to estimate uncertainty M1, then
where L1 = diag {L11 L12 L13} is a positive constant, p1 is a nonlinear function to be designed, and L1 = ∂p1(x)/∂x. The virtual control \({{\bar x}_{2c}}\) to drive e1 → 0 based on NDO can be determined as
where k1 = diag{k11 k12 k13} is a positive constant. In order to obtain the filtering virtual control x2c, wepass \({{\bar x}_{2c}}\) through an NTD with γ > 0. The derivative of e2 is
The NDO of the inner loop is given by
Define a non-singular terminal sliding mode surface as follows:
where a = diag {a1 a2 a3}, a i > 0, ρ1 and ρ2 are positive odd constants to be designed and \(1 < {{{\rho _1}} \over {{\rho _2}}} < 2,\dot e_2^{{{{\rho _1}} \over {{\rho _2}}}} = {[\dot e_{21}^{{{{\rho _1}} \over {{\rho _2}}}},\dot e_{22}^{{{{\rho _1}} \over {{\rho _2}}}},\dot e_{23}^{{{{\rho _1}} \over {{\rho _2}}}}]^T}\) Let S(t) = 0, t ≥ t r , then
where
Therefore, the system will remain in the second-order sliding mode when t ≥ t s . The values of ρ1, ρ2, a determine the speed of convergence of the control system. In this paper, a high-order terminal sliding mode control law is proposed as
where
3.3 Stability analysis
It can be assumed that the disturbances are slowly time-varying, so we can consider that Ṁ ≈ 0 and ėNDO = −L(x)eNDO[19].
Consider the following Lyapunov function candidate:
The derivative of V1 is
From Lemma 2,
Let k1 > I and \({L_1} > {1 \over 4}I\). Then,
Therefore, we can know that e1 and eNDO1 are uniformly ultimately bounded if limt→∞ e2 (t) = 0. Consider the following Lyapunov function candidate
The derivative of V2 is
From (11),
So,
Substituting (14) into (9) yields
The derivative of ė2 is
Substituting (24) into (20) yields
Let \(1 < {{{\rho _1}} \over {{\rho _2}}} < 2,{k_2} > 0,{k_3} > 0,{L_2} > 0\) and a > 0. Then,
Accordingly, we can know that the tracking errors of the control system designed in this paper are locally uniformly ultimately bounded when \({k_1} > I,{k_2} > 0,{k_3} > 0,{L_1} > {1 \over 4}I,{L_2} > 0\) and \(1 < {{{\rho _1}} \over {{\rho _2}}} < 2\).
4 Simulation results
The proposed controller is tested by a numerical simulation on the attitude maneuver flight control system of an F-16 aircraft. The following command values of α d , β d , and ϕ d are applied to the aircraft in a steady-state level flight of V = 200 m/s, h = 4000 m, F T = 60 kN:
y c is obtained from y d by the following command filter to satisfy Assumption 1:
where s is Laplace operator. The controller design parameters are chosen as k1 = 10I, k2 = 5I, γ = 10I, a = 5I, τ2 = 0.05, δ(0) = 10, where I represents the 3 × 3 identity matrix. NDO gains are chosen as
We assume that the uncertainties of the aerodynamic coefficients and external moment disturbance are time-varying. The time-varying uncertainties are given as
where \(C_x^r,C_y^r,C_z^r,C_l^r,C_m^r\) and \(C_n^r\) are the standard aerodynamic coefficients.
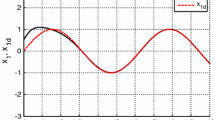
Figs. 1–3 present the simulation results when uncertainties do not exist. 0 represents the command signal. 1 represents the simulation result of the controller proposed in this paper. From Figs. 1–3, it is clear that the control law proposed in this paper can track the reference command signal effectively and make the tracking error converge.

Time response of α without uncertainties

Time response of β without uncertainties

Time response of ϕ without uncertainties
To demonstrate the tracking performance of the proposed control law, the backstepping controller in [18] is applied contrastively. Figs. 4–9 present the simulation results when the uncertainties exist. 1 represents the simulation result of filtering backstepping terminal sliding mode controller proposed in this paper. 2 represents the simulation result of the backstepping controller proposed in [18]. The tracking error convergence curves of e1 = [e1α, e1β, e1ϕ] are used to reflect the tracking control performance of the two controllers. The simulation results reveal that, under the condition of aerodynamic parameter perturbation and external disturbance uncertainties, the proposed control scheme can track the reference command signal more quickly and more accurately. Figs. 7–9 show that the nonsingular high-order terminal sliding mode control method can effectively weaken the chattering.

Time response of e1α with uncertainties

Time response of e1β with uncertainties

Time response of e1ϕ with uncertainties

Time response of δ e with uncertainties

Time response of δ a with uncertainties

Timeresponseof δ r with uncertainties
5 Conclusions
A filtering backstepping terminal sliding mode controller is designed in this paper to compensate for the effect of system uncertainties in CPS with time-varying parameter perturbations and external disturbances. NTD is used to obtain the derivation of the virtual control signal, simplifying the design of the controller and reducing the amount of computation. Nonlinear disturbance observers can effectively observe the uncertainties of CPS. Nonsingular terminal sliding mode controller can increase system robustness and tracking accuracy, and can effectively weaken the control signal chattering. Simulation results show that the proposed control system can quickly and accurately track the reference command signal. The method proposed in this paper may be also used in the design in other CPS controllers with aerodynamic coefficients and external disturbance uncertainties.
References
H. S. Li, L. F. Lai, H. V. Poor. Multicast routing for decentralized control of cyber physical systems with an application in smart grid. IEEE Journal on Selected Areas in Communications, vol. 30, no. 6, pp. 1097–1107, 2012.
J. R. Wen, M. Q. Wu, J. F. Su. Cyber-physical system. Acta Automatica Sinica, vol. 38, no. 4, pp. 507–517, 2012.
R. Poovendran. Cyber-physical systems: Close encounters between two parallel worlds. Proceedings of the IEEE, vol. 98, no. 8, pp. 1363–1366, 2010.
M. F. Yang, L. Wang, B. Gu, L. Zhao. The application of CPS to spacecraft control system. Aerospace Control and Application, vol. 38, no. 5, pp. 8–13, 2012.
H. S. Li, R. C. Qiu, Z. Q. Wu. Routing in cyber physical systems with application for voltage control in microgrids: A hybrid system approach. In Proceedings of the 32nd International Conference on Distributed Computing Systems Workshops, IEEE, Washington, USA, pp. 254–259, 2012.
R. Mei, Q. X. Wu, C. S. Jiang. Robust adaptive backstepping control for a class of uncertain nonlinear systems based on disturbance observers. Science China: Information Sciences, vol. 53, no. 6, pp. 1201–1215, 2010.
C. Byunghun, K. H. Jin, K. Youdan. Robust control allocation with adaptive backstepping flight control. Journal of Aerospace Engineering, vol. 228, no. 7, pp. 1033–1046, 2014.
J. Chen, S. L. Zhou, Z. Q. Song. Hypersonic aircraft dynamic surface adaptive backstepping control system design based on uncertainty. Journal of Astronautics, vol. 31, no. 11, pp. 2550–2556, 2010.
S. J. Yoo. Adaptive tracking and obstacle avoidance for a class mobile robots in the presence of unknown skidding and slipping. IET Control Theory & Applications, vol. 5, no. 14, pp. 1597–1608, 2011.
J. Y. Sung, J. B. Park, Y. H. Choi. Adaptive dynamic surface control of flexible-joint robots using self-recurrent wavelet neural networks. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, vol. 36, no. 6, pp. 1342–1355, 2006.
E. Abdlhamitbilal, E. M. Jafarov. Robust sliding mode speed hold control system design for full nonlinear aircraft model with parameter uncertainties: A step beyond. In Proceedings of the 12th IEEE International Workshop on Variable Structure Systems, IEEE, Mumbai, India, pp. 7–15, 2012.
I. C. Karagöz, E. M. Jafarov. Sliding mode robust tracking control for complete flight envelope of an UCAV with parameter uncertainties. In Proceedings of the 15th International Conference on Automatic Control, Modelling and Simulation, Brasov, Romania, pp. 253–258, 2013.
J. Geng, X. D. Liu, L. Wang. Dynamic sliding mode control of a hypersonic flight vehicle. Acta Armamentarii, vol. 33, no. 3, pp. 307–312, 2012.
K. Jamoussi, M. Ouali, L. Chrifi-Alaoui, H. Benderradji, A. El Hajjaji. Robust sliding mode control using adaptive switching gain for induction motors. International Journal of Automation and Computing, vol. 10, no. 4, pp. 303–311, 2013.
Z. Xi, T. Hesketh. Discretised integral sliding mode control for systems with uncertainty. IET Control Theory & Applications, vol. 4, no. 10, pp. 2160–2167, 2010.
J. F. Zheng, Y. Feng, X. M. Zheng, X. Q. Yang. Adaptive backstepping-based terminal-sliding-mode control for uncertain nonlinear systems. Control Theory & Applications, vol. 26, no. 4, pp. 410–414, 2009.
L. Li, J. Xie, J. Z. Huang. Modeling and dynamic surface adaptive sliding mode control of erecting mechanism. Systems Engineering and Electronics, vol. 36, no. 2, pp. 337–342, 2014.
L. P. Liu, Z. M. Fu, X. N. Song. Sliding mode control with disturbance observer for a class of nonlinear systems. International Journal of Automation and Computing, vol. 9, no. 5, pp. 487–491, 2012.
J. Yang, S. H. Li, C. Y. Sun, L. Guo. Nonlinear disturbance observer based robust flight control for airbreathing hypersonic vehicles. IEEE Transactions on Aerospace and Electronic Systems, vol. 49, no. 2, pp. 1263–1275, 2013.
T. Y. Lee, Y. D. Kim. Nonlinear adaptive flight control using backstepping and neural networks controller. Journal of Guidance, Control, and Dynamics, vol. 24, no. 4, pp. 675–682, 2001.
J. Q. Han. Active Disturbance Rejection Control Technique—The Technique for Estimating and Compensating the Uncertainties, Beijing, China: National Defence Industry Press, 2009. (in Chinese)
M. Y. Cui, D. H. Sun, Y. F. Li. Kinematic control algorithm for AGV with parameter uncertainties based on filtering backstepping. Control and Decision, vol. 28, no. 8, pp. 1200–1206, 2013.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the State Key Laboratory of Industrial Control Technology Zhejiang University China (No. ICT1447) and Shanghai Leading Academic Discipline Project (No. J50103).
Recommended by Associate Editor Yuan-Qing Xia
Rights and permissions
About this article

Cite this article
Li, F., Hu, JB., Zheng, L. et al. Terminal sliding mode control for cyber physical system based on filtering backstepping. Int. J. Autom. Comput. 12, 497–502 (2015). https://doi.org/10.1007/s11633-015-0903-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-015-0903-0