
Abstract
This paper proposes a search trajectory for a dual peg-in-hole assembly in the presence of uncertainty. To assemble a dual peg into a dual hole, the peg should be guided to the hole by coinciding with both position and orientation. Regarding this requirement, the trajectory of the dual peg is designed by the following new concepts: insertion guarantee region and hole insertion condition. First, the insertion guarantee region is a three-dimensional region based on the clearance between the dual peg and hole, which serves as the goal for the trajectory. Second, the trajectory is designed to satisfy the hole insertion condition, which is a geometric constraint. In this respect, the trajectory has distinct advantages of robust search performance and feasibility of implementation regardless of the shape of the components. The performance of the trajectory was experimentally verified using a 7-degree-of-freedom torque-controlled manipulator, and 100% success rate was reported in the guidance of the peg into the hole.














Similar content being viewed by others


References
Chang WC, Shao CK (2010) Hybrid fuzzy control of an eye-to-hand robotic manipulator for autonomous assembly tasks. In: Proceedings of SICE annual conference 2010, IEEE, pp 408–414
Chhatpar SR, Branicky MS (2001) Search strategies for peg-in-hole assemblies with position uncertainty. In: Proceedings 2001 IEEE/RSJ international conference on intelligent robots and systems. expanding the societal role of robotics in the the next millennium (Cat. No. 01CH37180), IEEE, vol 3, pp 1465–1470
Khatib O (1987) A unified approach for motion and force control of robot manipulators: the operational space formulation. IEEE J Robot Autom 3(1):43–53
Kim CH, Seo J (2019) Shallow-depth insertion: peg in shallow hole through robotic in-hand manipulation. IEEE Robot Autom Lett 4(2):383–390
Kim YL, Song HC, Song JB (2014) Hole detection algorithm for chamferless square peg-in-hole based on shape recognition using f/t sensor. Int J Precis Eng Manuf 15(3):425–432
Knepper RA, Layton T, Romanishin J, Rus D (2013) Ikeabot: An autonomous multi-robot coordinated furniture assembly system. In: 2013 IEEE International conference on robotics and automation, IEEE, pp 855–862
Lee H, Park J (2014) An active sensing strategy for contact location without tactile sensors using robot geometry and kinematics. Auton Robot 36(1):109–121
Park H, Park J, Lee DH, Park JH, Baeg MH, Bae JH (2017) Compliance-based robotic peg-in-hole assembly strategy without force feedback. IEEE Trans Industr Electron 64(8):6299–6309
Park H, Park J, Lee DH, Park JH, Bae JH (2020) Compliant peg-in-hole assembly using partial spiral force trajectory with tilted peg posture. IEEE Robot Autom Lett 5(3):4447–4454
Sathirakul K, Sturges RH (1998) Jamming conditions for multiple peg-in-hole assemblies. Robotica 16(3):329–345
Song HC, Kim YL, Song JB (2014) Automated guidance of peg-in-hole assembly tasks for complex-shaped parts. In: 2014 IEEE/RSJ international conference on intelligent robots and systems, IEEE, pp 4517–4522
Su J, Li R, Qiao H, Xu J, Ai Q, Zhu J (2017) Study on dual peg-in-hole insertion using of constraints formed in the environment. Ind Robot: An Int J 44(6):730–740
Suárez-Ruiz F, Pham QC (2016) A framework for fine robotic assembly. In: 2016 IEEE international conference on robotics and automation (ICRA), IEEE, pp 421–426
Suárez-Ruiz F, Zhou X, Pham QC (2018) Can robots assemble an ikea chair? Sci Robot 3(17):eaat6385
Triyonoputro JC, Wan W, Harada K (2019) Quickly inserting pegs into uncertain holes using multi-view images and deep network trained on synthetic data. arXiv preprint arXiv:1902.09157
Whitney DE (1982) Quasi-static assembly of compliantly supported rigid parts. ASME J Dyn Syst Measure Control 104:65–77
Xu J, Hou Z, Liu Z, Qiao H (2019) Compare contact model-based control and contact model-free learning: A survey of robotic peg-in-hole assembly strategies. arXiv preprint arXiv:1904.05240
Zhang K, Shi M, Xu J, Liu F, Chen K (2017) Force control for a rigid dual peg-in-hole assembly. Assem Autom 37(2):200–207
Zhou B, Pan M, Liu J, Wang Y (2018) Single force-guided precision peg-in-hole search of cylindrical part with small length/diameter ratio. In: 2018 IEEE 8th annual international conference on CYBER technology in automation, control, and intelligent systems (CYBER), IEEE, pp 589–594
Zhu Z, Hu H (2018) Robot learning from demonstration in robotic assembly: a survey. Robotics 7(2):17
Acknowledgements
This work was supported by Industrial Strategic Technology Development Program (No. 20004953) funded By the Ministry of Trade, Industry & Energy(MI, Korea)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Haeseong Lee and Sang Yup Lee: Contributed equally to this work.
I
I
This appendix considers a case of fitting a rectangular peg into a corresponding hole as an extension of the geometric analysis given in the paper above. Firstly, the dimension of the rectangle peg-in-hole assembly will be explained. Then, the insertion guarantee region will be computed as it is in Sect. 2. Figure 15 describes the coordinate system of the single rectangular peg-in-hole. In this figure, O\(_H\) and O\(_P\) are the centers of the hole and the peg coordinate systems, respectively. \(w_H\) and \(w_P\) are the width of the peg and the hole, \(h_H\) and \(h_P\) are the height of the peg and the hole. Figure 16 represents the top view of the single rectangular peg inside the single rectangular hole. The outer rectangle marks the hole and the inner rectangle marks the peg. \(\beta \) is the angle of \(\angle AO_PB\), which is constant. \(\varDelta x\) and \(\varDelta y\) are the translations of \(O_P\) from the \(O_H\).
where d is the position margin and

Coordinates and geometric information of a single rectangular peg and a single rectangular hole

Top view of the rectangular peg inside a rectangular hole

Illustrations to derive the insertion guarantee region. a The right-top corner contact; b the left-top corner contact; c the left-bottom corner contact; d the right-bottom corner contact

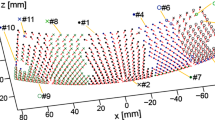
An example of the insertion guarantee region when \(w_H = 60\, \mathrm{mm}\), \(h_H = 80\,\mathrm{mm}\), and \(d = 0.1\, \mathrm{mm}\) where \(w_H\) and \(h_H\) are along x-axis and y-axis, respectively
By geometric interpretation, Fig. 17 shows how to compute the angle margin for the insertion guarantee region. \(C_i\) means the contact points between the peg and the hole in each case. \(\alpha _i\) is the angle of \(\angle BO_PC_i\). \(\theta _{u_i}\) means the candidates of the yaw angle margin, and each \(\theta _{u_i}\) can be computed as
For example, \(\theta _{u_1}\) is
where
Since this geometric interpretation is same as the analysis given in Sect. 2, the boundary of the allowed angle margin is
where \(i = 1, 2, 3, 4\). Consequently, the insertion guarantee region S is defined as
where \(\theta _s\) is a yaw rotation that allows the assembly task to be possible. Figure 18 shows an example of the insertion guarantee region when \(w_H = 60\) mm, \(h_H = 80\) mm, and \(d = 0.1\) mm.
Rights and permissions
About this article

Cite this article
Lee, H., Lee, S.Y., Jang, K. et al. Search trajectory with twisting motion for dual peg-in-hole assembly. Intel Serv Robotics 14, 597–609 (2021). https://doi.org/10.1007/s11370-021-00382-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11370-021-00382-7