
Abstract
Land surface geomorphology plays an important role in water and sediment dispersal processes in wetlands. For wetland practitioners and researchers to engage with these processes in time and space, they require topographic data in order to derive wetland surface gradient, cross-sectional shape and area, surface and subsurface hydrological connectivity, and hydraulic characteristics. A range of data options, with varying spatial resolutions, are available, ranging from free national and global resources (e.g. contour data and global elevation models) to project-specific high-resolution surveys (e.g. Differential Global Positioning Systems (DGPS), Photogrammetry, Light Detection And Ranging (LiDAR)). Due to the scarcity of high-resolution and high-accuracy data, especially in developing countries, data gathering and processing costs can be significant. This paper presents a commentary on a range of topographic data and processing options for a relatively small (~ 40 ha) floodplain wetland in the Eastern Cape, South Africa. It critically reviews the usefulness and shortfalls of various wetland-related applications ranging from gradient calculations to more detailed hydraulic modelling, and the data resolution required for each application. Free, low-resolution, datasets have a limited representation of geomorphology at this scale due to the relatively low-resolution and large vertical error. Field-based surveys (using survey-grade equipment such as a DGPS) have the benefit of providing accurate terrain results in areas with dense vegetation and surface water, while photogrammetry and LiDAR data are useful to represent the higher resolution morphology across the wetland, despite shortcomings regarding the penetration of dense vegetation and surface water. However, combining DGPS data with LiDAR proves to yield the best model for detailed process modelling for wetlands at the local scale.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
In fluvial geomorphic studies, detailed topographic data of bed, bank and floodplain surfaces are required to understand systems and to use them as inputs into process-based numerical models. Land surface topography plays an important role in how water and sediments are distributed along rivers and across wetland surfaces (Zevenbergen & Thorne 1987; French et al. 1995; Stovall et al. 2019; Xiao et al. 2019; Rajib et al. 2020). The quality of morphology and surface roughness input data used for modelling is critical to flow and material transport predictions, and the resulting channel and floodplain morphodynamics (Heritage et al. 2009). Land surface topography also affects associated ecosystem service function and consequent environmental risks (Kotze et al. 2009).
Studies delving into morphological changes over time and characterising morphological features at a site commonly use Digital Elevation Models (DEMs) to represent the morphology in three dimensions (Heritage et al. 2009; Błaszczyk et al. 2022; Li et al. 2022). The quality of a DEM is subject to the accuracy of individual survey points, the field survey strategy and coverage of morphological units, and the interpolation method used to create the DEM from the survey data (Heritage et al. 2009). The methods in which landscape morphology is surveyed have changed in response to increased development and availability of suitable hardware and software. Freely-available DEM datasets such as from the Shuttle Radar Topography Mission (SRTM), are limited by coarse-scale data. Increasing the resolution of the data is commonly carried out through field-based surveys and in-situ measurements.
Over the past 10 years, morphological-based survey approaches have become more established with the use of highly accurate survey hardware such as total stations and Differential Global Positioning Systems (DGPS). The use of this hardware has significantly reduced the error between repeat transects when surveying morphological change over time (Heritage et al. 2009). Additional advances in available hardware include Light Detection And Ranging (LiDAR), Terrestrial Laser Scanning (TLS) and computing power that can run large models generated by Structure from Motion (SfM) photogrammetry which provide high-resolution, fully distributed data of land surfaces and can cover a larger area in a shorter space of time. Long-range terrestrial laser scanning is increasingly being used for surveying rough mountainous terrain (Błaszczyk et al. 2022). However, an error can be introduced with individual point elevations, particularly in complex landscapes where the optimal elevated positioning of the scanner is limited, such as broad wetlands. With advances in survey technology, the difference in error between morphology-based ground surveys and aerial surveys is becoming significantly reduced (Heritage et al. 2009). Li et al. (2022) proposed a deep learning model as a method to improve the validity of reconstructed DEMs. Błaszczyk et al. (2022) found that the aerial data used in their study had gaps over the mountainous slopes due to low side overlap during the flight and reduced the data gaps using a long-range terrestrial laser scanner. This allowed for a full analysis of different geomorphic features across the landscape using a combination of methods.
Heritage et al. (2009) state that the morphological approach to channel bed surveying is highly accurate and error can be reduced by including morphological feature outlines, cut banks, breaks of slope and spot heights on uniform surfaces in the survey. Errors are commonly associated with the position of survey points relative to the morphology being surveyed (i.e., the surveyor must have an understanding of the system that is being surveyed). Błaszczyk et al. (2022) used both aerial SfM photogrammetry and terrestrial laser scanning and demonstrated that combining several techniques is an option, albeit an expensive one, in remote areas where data acquisition is not straightforward and data voids are present.
Wetland practitioners and researchers study wetlands to assess their ecological state, ecosystem service provision, the potential impact of planned activities, as well as to plan restoration activities. Topography in wetlands is created by physical and biological processes, and subsequently influences inundation patterns as well as sediment and organic matter dispersal (Grenfell et al. 2019; Keen-Zebert et al. 2013; Tooth et al. 2013; Tooth and McCarthy 2007). Thus, representing topography and geomorphology is vital for understanding spatial heterogeneity associated with biophysical processes and ecosystem service provision. This is especially important in wetlands situated along drainage lines, where flooding is associated with a combination of channel flow, hillslope seepage and direct rainfall.
To engage with landscape processes in time and space, practitioners require topographically accurate data such as wetland surface slope, cross-sectional morphology, variation in topography, location of morphological features, floodplain extent, surface hydrological connectivity and hydraulic characteristics (French et al. 1995). These metrics are essential for wetland assessments and management decisions that are based on spatial data. However, due to their high cost, accurate elevation data or high-resolution terrain models are often not freely available to developing countries. Nevertheless, multiple data options of variable resolution and accuracy are available, ranging from free national and global resources (e.g., contour data, SRTM, Advanced Land Observing Satellite) and project-specific high-resolution and accuracy surveys (e.g., using a DGPS, SfM, LiDAR). The spatial resolution and accuracy of each dataset limit its usefulness and often lead to confusion when practitioners need to apply a dataset to a given task.
Using a precise (< 2 cm Root Mean Square Error or RMSE vertical precision) DGPS survey of a small (~ 40 ha), floodplain wetland in the Eastern Cape, South Africa as a baseline, this study aimed to investigate the impact of variation in spatial resolution, precision (reproducibility of the results) and accuracy (how close the output is to the ‘true’ value) among available topographical datasets on 1.), wetland morphometrics, such as channel or wetland gradient, that are commonly calculated for wetland assessments, and 2.), the accuracy and precision of output surface elevation models in representing key geomorphic morphometrics for a floodplain wetland. We also compared the potential advantages and disadvantages in terms of cost and ease of data collection. The overall purpose was to determine whether the cost of certain datasets could be justified for specific applications, such as hydrodynamic modelling in wetlands, or whether similar results could be achieved using low-cost low-resolution alternatives. Answering this question has particular pertinence to the Global South, where high-resolution data are either scarce or excessively costly to commission.
Study area
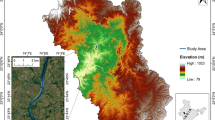
The study was based on a small meandering river floodplain wetland on the Gatberg River in the Eastern Cape of South Africa (Fig. 1). The Gatberg River is a headwater tributary to the Tsitsa River and larger Umzimvubu River and drains into the Indian Ocean. The wetland area is roughly 40 ha and has a continuous river channel that is 4 km long, ~ 5 m wide and ~ 2.5 m deep. Overbank floodplain areas are marked by multiple oxbows that are flooded by local rainfall and lateral seepage, as well as overtopping of the main channel during periods of high river flow. The wetland, located within the grassland biome, is dominated by a mixture of fairly short and dense vegetation (less than 1 m high) (Mucina et al. 2006; Pakati 2021). Smaller shrubs were present on the higher topographic features, such as alluvial ridges. Larger shrubby tree species are excluded from the wetland by a combination of frequent fires (~ 1 every 2 years), periodic inundation and grazing. Grass species occur across the wetland surface except within areas of permanent water. Common species include Sporobolus africanus, Eragrostis plana, Andropogon eucomus and Cynodon dactylon. Cyperus sp., Juncus sp. and Fimbristylis sp. occur in the damp grasslands and on the edges of permanent water. Typha capensis does grow seasonally in some of the flooded oxbows, but it is kept fairly short by grazing cattle. Other species present in the permanently inundated areas are Persicaria sp., Pycreus sp. and Schoenoplectus sp.. The climate is semi-arid (Aridity Index of ~ 0.44, as calculated by Trabucco and Zomer (2018), with an average annual precipitation of 779 mm which occurs predominantly during the summer season, whereas winter is typically dry (Mucina et al. 2006).

Location of the Gatberg wetland in South Africa and an oblique view of the meandering Gatberg Wetland (flow is towards the camera) under different flow conditions and exhibiting different stages of vegetation growth (A low clear early winter flow- May 2021 and B high and turbid mid-summer flow - February 2020).
Methods
For the study, a few commonly used elevation data sets were selected for comparison. This included a DEM derived from the national contours (available from CDNGI Geospatial Portal (cdngiportal.co.za)), 30 m SRTM (USGS EROS Archive-Digital Elevation-Shuttle Radar Topography Mission (SRTM) Non-Void Filled), and SUDEM (an interpolation of national contour data and SRTM data, see SUDEM–Stellenbosch University Digital Elevation Model CGA sun.ac.za). In South Africa, contour data is freely available from the Department of Rural Development and Landforms database, the National Geospatial Information (NGI). Contour lines are available throughout the country at at 5 m intervals. Accurately surveyed spot heights are also available. SRTM data are freely available around the globe and can be acquired online. The SUDEM is available for a nominal fee. The spatial resolution and vertical accuracy, cost and sources are described in the Results section. All datasets were projected to the ellipsoidal-based World Geodetic System 84 with local Hartebeeshoek94-Lo29 datum and converted to ellipsoidal height.
In addition to these datasets, four additional datasets, including a DGPS survey, a Topo to Raster model (called T2R from here onwards) using the contour and all DGPS survey data, a LiDAR survey, and a drone-based SfM output were compiled using a combination of field measurements and subsequent manipulation in ArcGIS. These methods represent a range of effort (and therefore cost) to create a wetland ground surface DEM.
The first entailed a field-based DGPS survey collated in the manner described by Heritage et al. (2009), where the focus is applied to rapid changes in slope and breakpoints (i.e., a morphologically-based survey). The DGPS comprised a base station with a rover and was not referenced to a local trigonometric beacon, but a local reference point was established to ensure relative precision through loop closure throughout the multi-day survey. The DGPS survey was composed of five evenly spread transects across the wetland surface at ~ 500 m intervals. Random spot heights on the surface and shorter cross-sections along meander bends were included. The DGPS survey served as the standard for comparison due to its high relative precision (< 2 cm RMSE vertical precision) and its ability to represent the terrain without vegetation or water depth affecting the elevation of the model.
The Topo to Raster function in ArcMap 10 was used to interpolate the 1:10,000, 5 m contours from the NGI and field DGPS point data. Two DEMs were created using the topo to raster feature (no enforce, with depressions indicated as sinks) at a 1 m resolution. In the first DEM, a line digitised from 1:10,000 aerial photographs indicating the location of the left bank was used as the channel, while in the second, a line of the right bank was used. The resultant DEMs were identical except the location of the channel was slightly offset. These two DEMs were merged using the Cell Statistics tool, with the mean value selected. This had the effect of widening the base of the river channel, while the rest of the floodplain was completely unaffected. To capture the elevation differences of meander scars and visible open water, these features were digitised from aerial images. An assessment of the survey data indicated that areas of open water were conservatively 0.7 m deeper than the surrounding floodplain, while unflooded meander scars were typically 0.2 to 0.5 m deeper than the surrounding floodplain. The features were converted to raster images with values of 0.7 and 0.4 m respectively. These elevation values were burnt into the DEM created by subtracting the elevations of the meander scar and lake raster using the Raster Algebra tool. The resultant DEM is not completely independent from the DGPS cross-section used for comparative purposes as the DGPS data was used as an input. However, the Topo to Raster feature does not honour input data values, and instead produces a hydrologically correct, smoothed surface which is useful for comparative purposes.
An SfM surface model was constructed from 757 drone-based aerial images with > 80% overlap using Agisoft Photoscan. A DJI Mavic Pro II with a 20 megapixel Hasselblad camera (L1D-20c with 10.26 mm focal length) was used at an elevation of 120 m in August 2019. The model was referenced using 10 identifiable natural ground control points surveyed with the DGPS on the same date as the flight, equally spread out across the wetland surface. As the channel was inundated during the drone survey, channel bathymetry was added to the surface model in RAS Mapper (see the method in the HEC RAS Mapper manual (Terrain Modification (army.mil)). The bathymetry was developed by interpolating the 5 cross-sections along the bank lines for the river length using the Cross-section Interpolation Surface tool.
LiDAR data were captured using a DJI Matrice 300 RTK UAV and DJI L1 LiDAR payload in February 2022. Scans were captured at 100 m above the ground and had 70% side overlap and were captured at a pulse rate of 148 kHz and scan rate of 55 Hz, with 3 returns. This resulted in a point cloud with 700 points per m2 (~ 8 ground points per m2). The ground points were converted to a Digital Surface Model with 0.16 m tiles and relative vertical precision of 3–10 cm RMSE.
The general parameters of the models were summarised in table form, such as resolution, vertical accuracy, type of model, the inclusion of bathymetry and cost estimates (produced by GroundTruth consultants for commercial drone-based SfM and LiDAR products). The longitudinal gradient of the wetland surface (difference in elevation/valley length) and the channel thalweg (difference in thalweg elevation/channel length) were calculated. To establish the ability of the different models to characterise geomorphic features common in the wetland (and important from a functional perspective), a cross-section of the topographical surface was extracted along a fixed transect and visually represented. Furthermore, the depth, width and cross-sectional area of the channel were calculated based on the cross-section. The results were qualitatively assessed against the DGPS survey and summarised intable format.
Results
The elevation models range in pixel size from 0.12 to 30 m (Table 1, Fig. 2). As expected, the vertical precision improves with increases in spatial resolution, giving a more detailed and precise representation of the surface or geomorphology. The majority of the models are surface models and exclude ground surface and bathymetry. Terrain models are based on the points that were surveyed/classified as ground points. The availability and cost increase for finer resolution models (Table 1). The SUDEM and drone-based SfM elevation models are surface models, and thus do not discriminate between the ground surface, the surface of vegetation or the water surface at the time of the survey. This may represent a substantial obstacle if vegetation is of variable height (e.g., in a surface model, tall reeds within flooded oxbows may have a similar surface height adjacent to low floodplain grasses). An example is the SfM output with 0.12 m pixels and vertical accuracy of 0.027 m RMSE for the control points and 1.38 m RMSE for the 18 checkpoints within vegetation. If vegetation height is similar across the surface, this error is reduced in relative terms (i.e., while the result may not be precise, the error is consistent across the wetland surface). In addition, if the model is to be used for hydrological modelling, the lack of bathymetry is a major impediment to further use. However, it is possible to combine survey strategies such that bathymetry may be added to a drone-based SfM survey, as was done in this study (see Fig. 2).
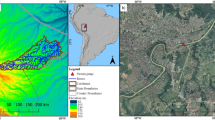
When looking at the detail presented by the elevation models in Fig. 2, it can be seen that the 5 m contour of the topographic map, SRTM and SUDEM data poorly represent the more detailed wetland morphology, such as the channel, levees and oxbows at the scale of the Gatberg wetland (Fig. 2 and 3). The T2R shows moderate morphological definition, whereas the SfM and LiDAR models show high levels of morphological definition in plan and cross-sectional view (Fig. 2 and 3).

A visual representation of the wetland surface with A 5 m contours on a 1:50,000 topographic map, B SRTM 30 m tiles, C SUDEM 5 m tiles, D T2R, E SfM, F SfM with bathymetry and G LiDAR for the Gatberg Wetland

A cross-sectional example of the various elevation models for the Gatberg Wetland with some of the morphological features indicated
The wetland gradient calculations deviated by 3 to 459% compared to the gradient calculated from the DGPS survey (Table 2). The LiDAR performed the best (3% deviation) compared to the SRTM (459% deviation). For the river thalweg slope calculation, the range was smaller, ranging from 13% (SfM with bathymetry) to 99% (SfM; Table 2). The SRTM and SUDEM could not be included in the thalweg calculations as the channel was not defined by the raster dataset.
With a focus on morphometrics, it can be seen that the models vary markedly, with the SRTM and SUDEM datasets producing no detail on the river channel (Table 3). The width of the bankfull channel deviates by 0.05 (LiDAR) to 91% (T2R), whereas depth deviates by 10 (T2R) to 60% (SfM) from what was surveyed. These deviations are evident in the cross-sectional area, with deviations of 26 (SfM with bathymetry) to 58% (T2R).
The topographic survey produces a highly precise terrain model including bathymetry but is limited in the representation of the wider wetland surface (Table 4). An increase in the interval of cross-sectional transects which incorporate the wider wetland surface can address this limitation. However, this is dependent on both the cost and time constraints of a specific project. The DGPS survey data produce accurate slope and cross-sectional representations. The T2R represent many of the surface features, such as the channel and oxbows moderately well and will be useful for slope and plan view area calculations. The SfM output has a high resolution of morphological features, but it represents the wetland surface (with vegetation) and shows some distortion (dishing or doming) along the cross-section, introducing some uncertainty in vertical accuracy along the cross-section. This model can be used for slope and plan view area calculations, it visually represents the morphological features (but includes vegetation elevations) and can be used for hydrodynamic modelling of flood flows when the bathymetry is included. The LiDAR model represents the terrain well (similar to the topographic survey), but lacks bathymetry.
Discussion
There is a range of free elevation products available that have the potential to answer some of the basic questions, such as wetland setting (macro topography), valley gradient, wetland surface gradient and valley width for smaller wetlands without significant resource investment. The ability of a dataset to model a particular characteristic, such as channel cross-sectional shape or wetland gradient, can be considered in terms of precision and accuracy. The precision and accuracy of the datasets are illustrated in Fig. 4 and described hereafter.
In general, vertical precision and accuracy improve with increases in spatial resolution (Stovall et al. 2019). Unfortunately, the freely available resources in developing countries (mostly national to global cover) are of low-resolution and not useful for detailed studies of smaller wetlands (no morphological features represented and a high error for wetland gradient calculation), as seen in the case of the Gatberg Wetland (area of 40 ha). For these smaller wetlands, field-based data are needed to improve cross-sectional or terrain models to include the topography of characteristic geomorphic features such as river channels, oxbows and flood channels.
From our experience, free data sources, such as SRTM, are ideal for a preliminary assessment of the wetland setting, especially on the Google Earth platform that combines satellite images with the DEM. Based on the findings one can use the low-resolution data to plan a field survey to improve the elevation model, keeping requisite simplicity in mind. Calculations of wetland surface gradient can be inaccurate by four-fold (~ 400%) due to the low vertical precision and accuracy across the large tiles. Care needs to be taken when calculating wetland surface gradient based on relatively low-resolution elevation models and results should be treated as preliminary.
The topographic survey along cross-sections and for targeted morphological features produced high-precision data, despite a fairly low spatial resolution of the larger wetland surface. This method is ideal for monitoring purposes, as it measures the terrain with precision. However, surveys have to be carefully planned to monitor relevant sections of the wetland surface as the coverage of the data is spatially limited depending on the number of transects/points surveyed. Data collection is normally time-consuming, but additional notes, such as vegetation type, surface substrate, etc., can be invaluable for representing the wetland in a model and also contributes to a sound baseline description and understanding of a system that can be used for monitoring.
The T2R method produced a useful surface that provides a good representation of the wetland gradient and floodplain features. A limitation to this method is due to smoothing which occurred during the processing that lowered the bank gradients, increased the channel area and resulted in the surveyed points protruding above the general bank surface on the elevation model. This might lead to additional errors if this surface model is used for monitoring or hydrodynamic modelling.
The SfM product has a detailed surface texture, but removing the vegetation from the surface model would be challenging as the grass cover was thick and varied in height across the surface. This would be a common challenge in all wetlands as they are often characterised by dense vegetation. The dense grass cover and distortions associated with the inaccurate geolocation of cameras, a rolling shutter and lens distortions introduced a significant reduction in vertical precision and accuracy when compared to the control points. With the added bathymetry along the river channel, this layer proved to be fairly detailed, but distortion is visible along the cross-section. This method is unfortunately susceptible to dishing and doming (negative or positive distortion of the surface) which is a function of lens distortions that are not well corrected during the SfM process (Carbonneau and Dietrich 2017). This method has the potential to be used for hydrodynamic modelling provided that the surface vegetation can be removed or the survey is conducted following vegetation die-back or a vegetation fire (low biomass) and the bathymetry can be included (or when a survey can be done during a period where the channel and wetland features are dry).
The LiDAR model performed well in representing the terrain with minimal distortions. However, areas with very dense grass or water were not well represented and introduced misrepresentations of the surface. Adding the bathymetry to the LiDAR surface model could improve the results significantly and would make it ideal for hydrodynamic modelling.

Schematic comparison of accuracy and precision of channel cross-sections and wetland longitudinal gradient derived from output digital elevation models produced from a. SRTM (30 m), b. T2R 5 m contour and DGPS survey interpolation, c. Drone-based SfM with surveyed bathymetry, and d. LiDAR. X marks the exact location, red dots the observed location and the circle size indicates the magnitude of the error
These comparisons of the various elevation models that could be used in developing countries helped to show their optimal use and at what scale the data should be interpreted. For each method, the user needs to be aware of the limitations and factor this into their interpretation of a system. The question at hand will guide the user as to which model should be used. For large wetlands and basic wetland descriptions, the free or low-cost datasets should be sufficient if combined with high-resolution overhead imagery. For detailed morphometrics and monitoring, field-based surveys are needed. The costs are high, but the benefit of precise data will show once comparisons are made after repeat surveys to monitor morphological change. The same applies to hydraulic modelling, where precise terrain data, such as DGPS or LiDAR (with bathymetric survey) would result in the most realistic hydraulic models.
Conclusions and recommendations
This paper summarised some of the main elevation model types that were available for a small floodplain wetland in a resource-poor developing country. The free resources are generally of low-resolution and have high vertical inaccuracies. These elevation models are useful for understanding the general landscape setting and the general gradient and width of the valley floor for smaller wetlands. Studies that necessitate detailed wetland surface gradient, morphometrics and elevation data of specific topographic features will require field-based surveys. Field-based surveys (using survey-grade equipment such as a DGPS) have the benefit of providing accurate terrain results in areas with dense vegetation and surface water. SfM and LiDAR data are useful to represent the higher resolution morphology across the wetland, despite shortcomings with dense vegetation and surface water. Combining DGPS data with LiDAR proves to yield the best model for detailed process modelling.
The method and data used should be determined by the question at hand and the resources available. Users should be aware of the constraints of different resolution data when constructing monitoring plans or project findings. Based on the experience of the Gatberg floodplain wetland, detailed topographic surveys and SfM or preferably LiDAR processing was required to characterise the wetland along transects and develop a terrain model with bathymetry that could be used for hydrodynamic modelling. It is recommended that wetland studies should include sufficient resources for field surveys to represent the wetland topography as accurately as possible to improve the modelling, monitoring and adaptive management of these valuable natural resources.
Data Availability
The data can be made available upon request.
References
Blaszczyk M, Laska M, Sivertsen A, Jawak SD (2022) Combined Use of Aerial Photogrammetry and Terrestrial Laser scanning for detecting Geomorphological changes in Hornsund, Svalbard. Remote Sens 14:601. https://doi.org/10.3390/rs14030601
Carbonneau PE, Dietrich JT (2017) Cost-effective non-metric photogrammetry from consumer-grade sUAS: implications for direct georeferencing of structure from motion photogrammetry. Earth Surf Proc Land 42:473–486. https://doi.org/10.1002/esp.4012
Elkhrachy I (2018) Vertical accuracy assessment for SRTM and ASTER digital elevation models: a case study of Najran city, Saudi Arabia. Ain Shams Eng J 9:1807–1817. https://doi.org/10.1016/j.asej.2017.01.007
French JR, Spencer T, Murray AL, Arnold NS (1995) Geostatistical analysis of sediment deposition in two small tidal Wetlands, Norfolk, UK. J Coast Res 11:308–321
Grenfell MC, Aalto R, Grenfell SE, Ellery WN (2019) Ecosystem engineering by hummock-building earthworms in seasonal wetlands of eastern South Africa: insights into the mechanics of biomorphodynamic feedbacks in wetland ecosystems. Earth Surf Proc Land 44:354–366. https://doi.org/10.1002/esp.4497
Heritage GL, Milan DJ, Large ARG, Fuller IC (2009) Influence of survey strategy and interpolation model on DEM quality. Geomorphology 112:334–344. https://doi.org/10.1016/j.geomorph.2009.06.024
Keen-Zebert A, Tooth S, Rodnight H, Duller GAT, Roberts HM, Grenfell M (2013) Late quaternary floodplain reworking and the preservation of alluvial sedimentary archives in unconfined and confined river valleys in the eastern interior of South Africa. Geomorphology 185:54–66. https://doi.org/10.1016/j.geomorph.2012.12.004
Kotze D, Marneweck G, Batchelor A, Lindley D, Collins N (2009) WET-EcoServices: a technique for rapidly assessing ecosystem services supplies by wetlands (Water Research Commission Report No. TT 339/09). Water Research Commission, Pretoria
Li S, Hu G, Cheng X, Xiong L, Tang G, Strobl J (2022) Integrating topographic knowledge into deep learning for the void-filling of digital elevation models. Remote Sens Environ 269. https://doi.org/10.1016/j.rse.2021.112818
Miliaresis GCh, Paraschou CVE (2005) Vertical accuracy of the SRTM DTED level 1 of Crete. Int J Appl Earth Obs Geoinf 7:49–59. https://doi.org/10.1016/j.jag.2004.12.001
Mucina L, Hoare DB, Lotter MC, Du Preez PJ, Rutherford MC, Scott-Shaw CR, Bredenkamp GJ, Powrie LW, Scott L, Camp GT, Cilliers SS, Bezuidenhout H, Mostert TH, Siebert SJ, Winter PJD, Burrows JE, Dobson L, Ward RA, Stalmans M, Oliver EGH, Siebert F, Schmidt E, Kobisi K, Kose L (2006) Grassland Biome. In: Mucina L, Rutherford MC (eds) The vegetation of South Africa, Leshoto and Swaziland. South African National Biodiversity Institute, Pretoria, pp 349–431
Pakati S (2021) Investigation of sediment buffering function of the Gatberg floodplain wetland in the upper Tsitsa River catchment, South Africa. (MSc thesis). Rhodes University, Grahamstown, South Africa
Rajib A, Golden HE, Lane CR, Wu Q (2020) Surface depression and wetland water storage improves major river basin hydrologic predictions. Water Resour Res 56:e2019WR026561
Shan J, Toth CK (2018) Topographic Laser Ranging and Scanning: Principles and Processing, Second Edition. CRC Press
Stovall AEL, Diamond JS, Slesak RA, McLaughlin DL, Shugart H (2019) Quantifying wetland microtopography with terrestrial laser scanning. Remote Sens Environ 232:111271. https://doi.org/10.1016/j.rse.2019.111271
Tooth S, McCarthy TS (2007) Wetlands in drylands: geomorphological and sedimentological characteristics, with emphasis on examples from southern Africa-Stephen Tooth, McCarthy TS. Prog Phy Geogr 31:3–41
Tooth S, Hancox PJ, Brandt D, McCarthy TS, Jacobs Z, Woodborne S (2013) Controls on the Genesis, Sedimentary Architecture, and Preservation potential of Dryland Alluvial Successions in stable Continental Interiors: insights from the Incising Modder River, South Africa. J Sediment Res 83:541–561. https://doi.org/10.2110/jsr.2013.46
Trabucco A, Zomer RJ (2018) Global Aridity Index and potential evapo-transpiration (ET0) climate database v2. CGIAR Consortium for Spatial Information (CGIAR-CSI), p 10
Xiao H, Shahab A, Li J, Xi B, Sun X, He H, Yu G (2019) Distribution, ecological risk assessment and source identification of heavy metals in surface sediments of huixian karst wetland, China. Ecotoxicol Environ Saf 185:109700. https://doi.org/10.1016/j.ecoenv.2019.109700
Acknowledgements
This work is based on the research supported wholly by the National Research Foundation of South Africa (Grant Number: 126382). The LIDAR data was funded by the Department of Forestry, Fisheries and Environment, Chief Directorate: Natural Resource Management Programmes (NRM), Directorate: Operational Support and Planning. We acknowledge GroundTruth for capturing and processing the LiDAR data.
Funding
Open access funding provided by Rhodes University. This work is funded by the National Research Foundation of South Africa (Grant Number: 126382).
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Data collection was performed by BW, NH and PS, analysis and material preparation were performed by all authors and. T the first draft of the manuscript was written by BW with inputs from SG and NH and all authors commented on later versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
van der Waal, B., Grenfell, S., Huchzermeyer, N. et al. Selecting and refining suitable methods of developing digital elevation models to represent geomorphic features and characteristics of smaller wetlands in data-scarce environments. Wetlands Ecol Manage 31, 539–550 (2023). https://doi.org/10.1007/s11273-023-09932-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11273-023-09932-5