
Abstract
Deep Learning (DL) is pervasive across a wide variety of domains. Convolutional Neural Networks (CNNs) are often used for image processing DL applications. Modern CNN models are growing to meet the needs of more sophisticated tasks, e.g. using Transposed Convolutions (TCONVs) for image decompression and image generation. Such state-of-the-art DL models often target GPU-based high-performance architectures, due to the high computational and hardware resource needs of TCONV layers. To avoid prohibitive GPU energy costs, CNNs are increasingly deployed to decentralized embedded autonomous devices, such as Field Programmable Gate Arrays (FPGAs). However, this poses challenges for designing efficient hardware implementations of TCONV layers. This paper presents a parameterized design and implementation of a new TCONV module, which is synthesizable onto FPGAs. It is implemented using the High-Level Synthesis (HLS), through a C++ template to parameterize its functional and non-functional properties. These parameters allow kernel sizes, image sizes, quantization and parallelism to be varied by users. With a systematic exploration in this design space, we find an optimal instance of this TCONV module that achieves 6.25 Giga Outputs per Second (Gout/s) using just 1.53 W of power. We then use our TCONV layer in two neural networks for image decompression and image generation. Image decompression achieves a speed throughput of more than 30K frames-per-second (fps) using only the 16% of resources on average, image generation achieves an energy efficiency of 324 fps/W and outperforms comparable state-of-the-art models by at least 7.3×.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Convolutional Neural Networks (CNNs) have gained widespread adoption in several applications, such as image processing [1], speech recognition [2] and robotics [3].
Input data, in the form of multi-dimensional arrays, are managed through a sequence of computing layers that modulate the space representation to handle the complexity of information. While down-sampling layers progressively compress data to extract relevant features, up-sampling stages act in the opposite way, by predicting new informative content to be arranged within a wider space.
Among several up-sampling layers, Transposed Convolutions (TCONVs) work well with image processing tasks. Indeed, they exploit learnable filters to produce high-resolution images starting from low-resolution representations. They are used for image generation through adversarial learning, where Generative Adversarial Networks (GANs) [4] build new images similar to those belonging to the training dataset. The detection of fake images in social media is an application scenario [5]. TCONVs are also suitable to implement pixel-level classification, or semantic segmentation, to highlight different objects within an image [6]. For instance, medical image segmentation makes use of TCONV-based decoders to analyze optic discs, retinal vessels and lungs [7]. Super-resolution imaging [8] is another scenario that benefits from such up-sampling layers to deal with virtual and augmented reality through smart head-mounted displays [9].
However, the performance of TCONVs are often impacted by high computational complexity. Indeed, they require input data pre-processing that results in more computations compared with conventional Convolutions (CONVs) [10]. Low-latency applications are extremely susceptible to this detrimental effect, thus demanding highly-parallelizable devices. Mainstream Graphics Processing Units (GPUs) effectively meet the parallelism constraint, but at the cost of a higher power dissipation [11]. Field Programmable Gate Arrays (FPGAs), other than offering a reasonable trade-off in terms of speed and power, also provide a flexible substrate suitable to not only deploy parallel CNNs, but to also infer either alternative algorithmic strategies or compression techniques (e.g., data quantization) to further improve the overall efficiency with respect to GPUs. FPGA can address the complexity issue by skipping redundant computations [12], or revisiting the conventional data pre-processing [13, 14]. The FPGA implementation of a 16-bit TCONV-based GANs [12], where redundant computations are skipped, outperformed the energy-efficiency on GPU by a ~ 3× factor. More aggressive quantization may boost such improvement, as shown in image classification CNNs implemented on FPGAs [15, 16]. However, the impact of deep quantization over up-sampling models using TCONVs is still under-explored.
Motivated by all these preliminary considerations, we have recently investigated the joint impact of parallelism and quantization over a simple Transposed Convolutional Neural Network (TCNN), implemented on FPGA [17], that deals with image decompression. The High-Level Synthesis (HLS) paradigm has been adopted, since the latter allows (1) the architecture to be platform-independent, and (2) parametric C++ templates to be used to investigate different configurations with minimal top-level modifications. We have performed an extensive design-space exploration, by either varying the input and output parallelism (i.e., the number of input images and output images processed in parallel) or the data bit-width, to determine the optimum configuration, by using the commercial XC7Z020 FPGA. We have observed that the architecture is able to decompress MNIST [18] and Fashion-MNIST [19] with only the ~ 2.5% accuracy loss when moving from 8 to 4 bits. Parallelism provides a 3.5× speed-up, whilst only requiring less than the 10% of Look-Up Tables (LUTs).
This work extends the previous investigations and provides further lines of research. Specifically, the new contributions can be summarized as follows:
-
An extended review about state-of-the-art TCNNs deployed on FPGAs (Section 2).
-
A detailed presentation of the C++ TCONV layer template, suitable to be implemented within dataflow TCNNs. The impact of the specific TCONV parameters over the resources utilization and the speed throughput are presented, as well as comparisons with some state-of-the-art competitors (Section 3). When implemented within the XC7Z100 FPGA device, the architecture provides 6.25 Giga Outputs per Second (Gout/s), whilst dissipating only 1.53 W, using ~ 11.7k LUTs and 4.52 Mb of on-chip memory.
-
A high-level design space exploration of the TCONV decoder from [17], using C++ #pragmas to control dataflow and data parallelism, memory resources, pipelining and loop unrolling. In particular, the trade-off between resources utilization and throughput is discussed (Section 4). The analysis, carried out in the range 8–4 bits, shows an improvement of 3 orders of magnitude in the number of frames-per-second (fps), with a 16% average resources utilization at most.
-
The characterization of a more complex TCNN, dealing with image generation through the Deep Convolutional Generative Adversarial Network (DCGAN) paradigm [20]. The impact of parallelism over the resources utilization and throughput is presented, as well as comparisons with state-of-the-art DCGAN accelerators (Section 5). The characterization at 5-bits highlighted an energy efficiency of 324.32 fps/W, which outperforms the art by at least ~ 7.3×.
Finally, conclusions are drawn in Section 6.
2 Background and Related Works
Several CNNs take advantage of TCONV layers, including architectures tailored for image generation and models conceived to either decompress data or provide super-resolution images. The former includes the well-known DCGAN [20] and consists of two networks, namely the discriminator and the generator. Training aims at strengthening the generator to build realistic images similar to the actual dataset under examination. While the discriminator consists of consecutive Convolution (CONV) layers that progressively down-sample the informative content for binary classification, the generator stacks multiple TCONV layers to build an image starting from a latent vector. Conversely, models for image decompression and super-resolution usually rely on an encoder-decoder architecture. For instance, the Fast Super-Resolution CNN (FSRCNN) [8] uses an encoder, made of seven CONVs layers, to extract meaningful features from inputs. The decoder adopts just a single TCONV layer to provide the final high-resolution image.
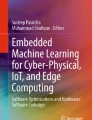
The generic TCONV layer receives a set of IC input feature maps (ifmaps), each consisting of HI × WI activations, and a set of OC 3-D filters, each consisting of IC kernels of K × K weights. As a result, the layer provides a set of high-resolution OC output feature maps (ofmaps), each HO × WO-sized. The ofmaps sizes are proportional to those related to the ifmaps by a factor S, known as stride or up-sampling factor. Each 3-D filter performs a 3-D TCONV processing the IC ifmaps, thus generating one of the OC ofmaps. Optionally, OC biases can be finally summed up to the ofmaps activations. By a top-level viewpoint, with no reference to the specific algorithm adopted, as depicted in Fig. 1, the generic TCONV layer practically matches the exoskeleton of conventional CONV layers. However, in order to meet the up-sampling behavior, the needed computations may significantly exceed those required by CONV layers. Indeed, the last TCONV layer of the FSRCNN may require up to ~ 6.75 more Multiply-Accumulations (MACs) with respect to the CONV layers [10]. This is due to the fact that, conventionally, TCONVs can be treated as direct CONVs over a dilated representation of the generic ifmap. To better understand this point, let us consider a 4 × 4 ifmap that is subjected to a filter having just one 2 × 2 kernel (Fig. 2); we also suppose S = 2. Firstly, the ifmap is up-sampled, by interleaving S–1 zeros between adjacent activations. Then, a direct CONV is performed between the dilated ifmap and the 2 × 2 kernel. As a result, each output activation is given by 2 × 2 MACs. In total, considering that 64 activations are generated, this TCONV costs 256 MACs. In the case of a conventional CONV, the overall cost would have been ~ 86% lower.

Example of TCONV layer with IC = 3 and OC = 3.

Example of a TCONV between a 4 × 4 ifmap and a 2 × 2 kernel. The yellow cells within the dilated ifmap represent the actual input activations.
High computational complexity makes it difficult to achieve low latency performance, typically required by real-time systems. As a result, efforts to accelerate TCNNs on dedicated hardware, such as FPGAs, have been undertaken in recent years [10, 12,13,14, 21,22,23,24,25, 27, 28, 30]. Different hardware-oriented algorithmic strategies have been investigated, with the aim to trade-off the resources utilization, the throughput and the power dissipation. The dilation of ifmaps, through zeros insertion, is the primitive way to infer the up-sampling capability to conventional CONV engines. This strategy was effectively managed in [12] through the FlexiGAN framework, which skips the redundant computations exhibited by the zeros insertion. This is accomplished by adding extra control logic to coach the computing core about the actual patterns to be managed (i.e., the patterns of non-zero values). As an alternative approach, the multi-channel-multi-kernel parallel algorithm was presented in [21], which rearranges K × K TCONVs into K2 separate 1 × 1 CONVs to avoid patterns with zeros.
With the aim of transforming TCONVs into CONVs, the algorithm proposed in [10] decomposes wide filters in multiple sub-filters, to be then processed by as many CONV engines. Starting from the observation that specific TCONVs with zeros insertion exhibit S × S regular patterns of actual computations, the generic filter can be split into S × S smaller filters, each consisting of a different number of weights, before being supplied to the CONV engine. However, the different number of weights of each pattern results in computational imbalance. The latter was addressed by the iterative filters sub-splitting proposed in [22], where the achieved efficacy was evaluated over both the FSRCNN [8] and the DCGAN [20] models. Both the above approaches [10, 22] need to pre-process filters off-chip, by making challenging the run-time adaptability to different configurations. In order to avoid preliminary transformations, as demonstrated in [13], ifmaps’ activations can be properly re-arranged at run-time. The equivalent reconfigurable circuit was made capable to support different filter sizes and benchmarked using the FSRCNN [8]. Finally, filters management was also taken into account in Uni-OPU [23] to both addresses zero-insertion in TCONV and offer adaptability to the nearest-neighboring up-sampling method that, in turn, dilates the ifmaps by replicating pixels instead of inserting zeros.
Alternative strategies strove to either leverage the Winograd transformation [29] or to adopt hybrid computations to alleviate the high computational complexity. The former strategy was examined in [24], where element-wise multiplication manipulation was used to model multiplications as simpler additions and shift operations. Conversely, the architecture in [25] adopted a mixed approach in which part of TCONVs are replaced by average computations to minimize the overall MACs. The key benefit of such an approach is to improve the throughput noticeably, at the cost of lower accuracy.
The Input-Oriented Mapping (IOM) strategy [26] uses a completely different algorithm that produces the same outputs of the previous approaches, but avoids both zeros insertion and sub-filters management. The HI × WI activations of the generic ifmap are multiplied by the K × K kernel weights, thus providing HI × WI provisional output windows. When K > S, adjacent windows overlap, by sharing K–S columns and rows. The overlapping areas are summed up to provide the actual results. The architecture presented in [14] firstly adopted the IOM on FPGAs, with reverse looping to avoid accumulations for overlaps, by taking into account the input coordinates for each iteration. Conversely, the reconfigurable engine proposed in [27] dealt with overlaps by carefully using the on-chip Digital Signal Processing (DSP) slices to boost the speed performance at limited power dissipation. Results reported in [28] demonstrated the suitability of both the IOM and neural network compression to manage 2-D and 3-D GANs on FPGAs. They also shown that filters pruning allows low-weights connections to be removed and, accordingly, the computational efficiency to be improved. Authors in [30] dealt with semantic segmentation by proposing a parameterizable architecture to comply with different neural networks. They also compared the FPGA results with the equivalent software on GPU. While the latter dissipates at least 147 W on the NVIDIA Titan X (Pascal) GPU, the FPGA accelerator used only 9.6 W.
In this work, we further extend the investigations about the FPGA implementation of IOM-based TCONV layers, by proposing a platform-independent HLS template, able to be adapted either to very low bit-width or to high parallelism, in accordance with the constraint of the specific deep learning task to be performed. The synthesis tool is supplied by HLS #pragmas to balance the trade-off between resources utilization, speed throughput and power dissipation, in order to achieve the highest energy efficiency.
3 Design and Characterization of the HLS-Based Transposed Convolution Layer
The generic TCONV layer, used within the TCNNs discussed in this work, is described at the C++ abstraction. The template is made parameterizable in terms of (a) the bit-width N, (b) the TCONV parameters (i.e., the kernel size K, the stride S, the ifmaps sizes HI, WI), and (c) the input and output parallelism factors (i.e., TIC and TOC). These parameters allow either characterizing different configurations onto the same device or implementing a specific architecture on different devices.
3.1 The Proposed Design
The algorithm for the proposed TCONV layer is reported in Listing 1. The equivalent architecture is made able to process TIC ifmaps in parallel, using TOC × TIC filters and TOC biases at the same time. While the activations are the actual inputs, all the weights and biases are preliminarily stored on-chip. At the completion of the computations, the circuit provides TOC ofmaps in parallel. Figure 3 illustrates an example of top-level block diagram when TIC = 2 and TOC = 2. Considering the output parallelism factor, line 1 highlights that OC/TOC steps are required to generate all the ofmaps. Referring to Listing 1, for each iteration of the loop in line 1, the circuit takes IC/TIC + 1 steps (line 2). The first IC/TIC steps are needed to compute the 3-D TCONVs between the TIC ifmaps and the TOC × TIC filters, to provide a group of TOC ofmaps. The extra step is used to (a) add the TOC biases, and (b) move the actual outputs out, after being temporarily stored within on-chip memories.
Listing 1
The pseudocode of the Transposed Convolution Layer


Parallel inputs and outputs of the TCONV Layer when TIC = 2 and TOC = 2.
Listing 2 details the 3-D TCONV that makes use of the IOM strategy carried out on line 8 in Listing 1. In what follows, the reported lines refer to Listing 2, unless otherwise stated. The #pragma HLS PIPELINE (line 3) ensures that the underlining loops are parallel performed in a pipeline fashion. For each clock cycle, as stated by the Initiation Interval (II = 1), a stream of TIC activations is read and saved in the array inAct (line 4). The TIC activations are multiplied by the respective TOC × TIC × K × K weights of the array filt, and subjected to columns overlap. We refer to weights to indicate the trained parameters of the generic neural network.
Listing 2
Detail of the Input-Oriented Mapping 3-D TCONVs

As a result, TOC × TIC windows of K × K provisional results are generated each cycle. Within each window, the locations having row index kr < S and column index kc < S are final, while the remaining cells must be overlapped to those belonging to subsequent windows, either in column- or row-sense. Firstly, column overlaps are managed in lines 9–20. There, while the outCol array collects the provisional results, the ColBuff array is responsible to temporarily store the products to be overlapped. The column overlap takes place by accumulating the products belonging to the first K–S columns of the current windows with those belonging to the last K–S columns of the windows computed in the previous clock cycle (line 13). Accordingly, ColBuff saves the current products having column index kc ≥ S (lines 18–20). The processing of the very first TIC activations does not entail accumulations, as stated by the body of lines 10–11.
Lines 21–36 report the more complex management of row overlaps. In this case, while the outRow array stores the new computations, the buffer RowBuff stores the provisional results to be overlapped. Specifically, the first K–S rows of the current windows are accumulated to the last K–S rows of the windows previously computed, and which share the same column indices. The latter were computed WI clock cycles before according to the raster-order alignment. In addition, considering that the column overlap implies that only the first S outputs of each row are valid for each clock cycle, row overlap also takes care of the latter consideration (lines 21–22). Accordingly, RowBuff saves the current outputs having row index kr ≥ S and column index kc < S (lines 32–36). The processing of the TIC activations belonging to the first row of the generic ifmap does not entail accumulations, as stated by the body of lines 23–24.
To better explain the behavior of the IOM strategy, Fig. 4 illustrates the example in which an ifmap having HI = WI = 2 is processed by a filter with K = 3 and the stride S = 2. The input activation I00 is multiplied by the weights Wij, with i = 0, …, 2 and j = 0, …, 2. As a result, the provisional output window, associated to the array outCol, and having activations Rmn, with m = 0, …, 2 and n = 0, …, 2, is placed within the output space. While the activations having m = 0, 1 and n = 0, 1 are final, the remaining activations must be accumulated either along the columns or along the rows with the results provided by the subsequent products. All these activations are followed by an asterisk, which means that they concur to compose the final results to be placed in the generic (m.n) position. Specifically, the activations with n = 2 are stored within the ColBuff array for column overlap during the next cycle. Conversely, activations with m = 2 and n = 0, 1 are temporarily stored within the RowBuff array for subsequent row overlap. The activation R22 will be accepted by RowBuff during the next clock cycle, in that it must be preliminary subjected to column overlap.

Example of IOM-based TCONV between a 2 × 2 ifmap and a 3 × 3 weights kernel.
This process is repeated for the input activation I01, which either fully generates or contributes to the output activations Rmn, with m = 2, …, 4 and n = 0, …, 2. In this step, column overlap definitely provides the final activations R02 and R12. Conversely, R22 is stored within the RowBuff array for row overlap purposes.
The input activation I10 belongs to the second row of the ifmap. Starting from this point, row overlaps will be also executed. After having generated the activations Rmn, with m = 0, …, 2 and n = 2, …, 4, those having m = 2 are accumulated to the temporary results provided two cycles before, which share the same row index and have n = 0, 1. The provisional result R22 is stored within ColBuff to be subjected to its final column overlap during the next cycle. Finally, the input activation I11 generates the final results Rmn, with m = 2, …, 4 and n = 2, …, 4.
In order to comply with 3-D TCONV, the TOC × TIC windows are summed up in a pixel-wise manner (lines 37–41) to generate the provisional TOC ofmaps. Obviously, if no parallelism is exploited, no further computations are required (lines 37–38). The process is equally repeated when the subsequent group of TIC ifmaps is processed, thus generating a new group of provisional TOC ofmaps, which must be accumulated to that generated during the previous cycle. To manage this, an on-chip buffer, namely outBuff, is exploited. By a circuital point of view, the latter can be thought as TOC banks of S simple dual-port memories, each being HI × WI wide. During the writing phase, outBuff receives TOC × S × S activations per cycle, while during the read phase it provides the data as a stream of TOC activations per cycle, in order to well comply with the raster-order policy of either a subsequent TCONV layer or an external memory support.
The writing phase works as follows: according to the IOM strategy, the TIC ifmaps are able to generate TOC ofmaps with S × S valid activations per clock cycle. The generic memory bank stores the S × S results, into the S memories. Taking into account that the latter consists of S rows of S adjacent activations, the S memories of the bank store S activations in each cell.
To properly access each memory cell, the read phase makes use of a control logic that manages two pointers, namely buff_idx and cell_idx that indicates, respectively, which memory of the bank and which specific cell are under analysis. Without loss of generality, the example reported in Fig. 5 shows the behavior of outBuff during the reading phase. There, TOC = 1, S = 2 and HI = WI = 2. In other words, the outBuff consists of TOC = 1 memory bank of S = 2 memories (i.e., Memory#0 and Memory#1). Each memory has HI × WI = 4 cells, each able to accommodate S = 2 activations. The numbers indicated in each cell refer to the spatial position of the activations within the ofmap space. The control logic follows that numbering strategy to furnish TOC = 1 activations per clock cycle. During the first cycle, buff_idx = 0 and cell_idx = 0. This state is preserved for two cycles, in order to get the first two activations stored within the Memory#0. During the third and fourth cycles, cell_idx = 1 and the activations R02, R03 are read. Afterwards, cell_idx is set again to 0, while buff_idx = 1. Accordingly, the activations R10 and R11 are read. Thus, cell_idx = 1 to read the activations R12 and R13. At this point, in order to read the activations R20 and R21, buff_idx = 0 and cell_idx = 2. And so on for the remaining activations, following a ping-pong way.

Example of outBuff management when HI = WI = 2 and S = 2.
3.2 Parametric Analysis
In order to be compliant with real FPGA-based acceleration architectures, the proposed TCONV layer is equipped with the streaming interface of the fourth generation Advanced eXtensible Interface (AXI4-Stream) [31]. To this aim, the #pragma HLS INTERFACE axis is used.
As a first set of experiments, the proposed template implements several circuit configurations, in order to examine the trend of both resources utilization and speed throughput when the specific TCONV parameters are varied (i.e., the kernel size K, the stride S and the ifmaps sizes HI, WI). The characterization is carried out using the Xilinx Vivado Design Suite (v2019.2) and referring to the XC7Z020 device at the 100 MHz clock frequency. The resources utilization is evaluated in terms of Look-Up Tables (LUTs), Flip-Flops (FFs), on-chip Block Random Access Memories (BRAMs) and Digital Signal Processing slices (DSPs). The frames-per-second (fps) metric is considered for the evaluation of the speed throughput. Figure 6a-c illustrate the obtained trends. For each plot, the horizontal axis refers to the specific parameter under evaluation, while the vertical axis reports the resources utilization as well as the achieved throughput.

Parametric analysis of the TCONV layer (a) varying S, (b) varying K, (c) varying HI (WI).
The impact of the stride S is reported in Fig. 6a. The variation of S is typically adopted in super-resolution imaging, which relies on wide filters to process the ifmaps [8]. Accordingly, K is set to 9 and left fixed for all the configurations. The other parameters are fixed to N = 8, HI = WI = 32, TIC = 2, TOC = 2. While LUTs, FFs, and DSPs are practically unaffected by S, the quantity of BRAMs grows with the latter. This is justified by the fact that the sizes of the generated ofmaps are proportional to S and, in turn, they are temporarily buffered in on-chip memories to comply with 3-D TCONV accumulations. For example, varying S from 2 to 4 leads to a 3.6 × increase of memory. As stated in Section 3.1, the on-chip buffers are made able to write data as a stream of TOC × S × S activations per cycle. However, in order to satisfy the raster-order policy of contiguous TCONV layers, the stored activations have to be moved out as a stream of TOC values per cycle. The latter directly impacts on the latency that becomes proportional to S. As a result, the higher S, the higher the latency and the lower the frame rate.
The impact of the kernel size K is reported in Fig. 6b. There, while K is varied between 3 and 9, the other parameters are fixed to N = 8, HI = WI = 32, S = 2, TIC = 2, TOC = 2. The computing resources (i.e., LUTs and DSPs) are strongly influenced by K. This is due to the use of #pragma HLS PIPELINE that completely unrolls the computational loops of the IOM to meet the II = 1 constraint. The higher the filter size, the higher the number of parallel hardware replicas. Conversely, the fps is practically independent of K. Indeed, the negligible ~ 5.1% loss noted when K is moved from 3 to 9 is due to the low amount of extra cycles to load wider 9 × 9 kernels.
Finally, the impact of the input fmap sizes HI, WI is reported in Fig. 6c, where HI = WI by supposing square fmaps, as usually happens in CNNs. The sizes range from 8 to 128, which is usual in image generation. The other parameters are fixed to N = 8, K = 4, S = 2, TIC = 2, TOC = 2. As expected, the throughput is strongly influenced by HI and WI. Indeed, wider ifmaps require more clock cycles to be processed by the TCONV layer. On-chip BRAMs are also influenced by the referred sizes, especially when HI, WI ≥ 32. Indeed, at the parity of S, the wider the ifmaps, the wider the ofmaps to be temporarily stored on-chip.
Table 1 summarizes all the performed experiments, by reporting (a) the parameters of each configuration, (b) the resources utilization (i.e., LUTs, FFs, 18 Kb BRAMs, DSPs), and (c) the throughput in terms of fps.
3.3 Comparison with State-of-the-Art Competitors
In this Section, the proposed TCONV layer is compared to several state-of-the-art FPGA-based architectures [23, 25, 27] at a parity of bit-width N, kernel size K and stride S, as well as the used device. Table 2, other than reporting the referred parameters, provides information about (a) the output image sizes (HO × WO); (b) the output parallelism, given by the number of images generated in parallel (TOC); (c) the resources utilization (i.e., LUTs, FFs, BRAMs, DSPs used); (d) the clock frequency; (e) the throughput in terms of Giga Outputs per Second (Gout/s); (f) the power consumption and the energy efficiency (i.e., the ratio between the throughput and the power). Power consumption was estimated by analyzing the post-implementation results through the power analysis tool available within Vivado.
The circuit having K = 3 is implemented within the XC7Z020 FPGA device to be compared with the direct competitor [25]. It can be seen that, due to the higher parallelism, the proposed solution exhibits twice the throughput but at the expense of a ~ 36% lower energy efficiency. Indeed, the hybrid computational approach adopted in [25] to replace many TCONVs with simpler averages leads to a power dissipation of only ~ 9 mW and to a DSP slices utilization ~ 5× lower than the proposed architecture.
The circuit having K = 5 is implemented within both the XC7Z020 and the XC7Z100 FPGA devices and directly compared to the reconfigurable architectures proposed in [27]. Both the accelerators adopt the IOM strategy for TCONV computations. However, in [27] VHDL templates are used to improve speed performances. When the XC7Z020 device is referred to, the novel architecture exhibits a ~ 25% higher throughput, due to the doubled parallelism, even running at a ~ 37.5% lower frequency. Results obtained for the XC7Z100 part show that the proposed design is ~ 1.14× more energy-efficient than [27], while running ~ 1.5× slower. Finally, when compared to the accelerator Uni-OPU [23], the proposed solution is only ~ 5.8% less energy-efficient, but it uses ~ 89.8%, ~ 95.8%, ~ 59.7%, ~ 74% less LUTs, FFs, DSPs and BRAMs, respectively.
Finally, in order to get a more insightful understanding about the impact of power over the time, we also retrieved the energy values for all the implemented circuits. Considering that all of them take the same number of clock cycles to complete the task, the reported energy depends on the clock frequency and the power consumption. The XC7Z020 implementation with K = 3 dissipates ~ 19 μJ at 125 MHz. At the same frequency, the K = 5 configuration shows a ~ 24.2% increment due to the slightly higher power (because of the higher usage of computing resources to manage wider filters). As expected, the high-end XC7Z100 implementation led to the highest contribution of 62.8 μJ to meet the doubled parallelism. When comparing the XC7Z020 and the XC7Z100 implementations at K = 5, while the power dissipation shows a 4.25× increase, the energy ratio is only 2.7×. This because the XC7Z100 implementation benefits from a 50% higher clock frequency.
4 Characterization of a Decoder Through Design-Space Exploration
This Section evaluates the suitability of the TCONV layer model introduced in Section 3 to be accommodated within dataflow architectures, consisting of stacked layers that exchange informative content on-chip, by reducing the off-chip memory accesses to send and retrieve the intermediate results. The evaluation has a twofold aim: (1) examine the suitability of careful high-level synthesis, through the effective use of #pragmas; (2) determine the impact of the bit-width N, and parallelism configurations, over the implemented architectures.
4.1 The HLS Decoder Template
The top-level model of the TCNN for image decompression, namely decoder, is reported in Listing 3. Two TCONV layers compose the network, with the former also equipped with the Rectified Linear Unit (ReLU) non-linearity [32]. The first layer is supplied by four 8 × 8 ifmaps, and 16 filters of 4 × 3 × 3 weights. The stride S = 2. Accordingly, sixteen 16 × 16 fmaps are generated and provided to the second layer that, in turn, uses 1 filter of 16 × 3 × 3 weights. Finally, a 32 × 32 ofmap is provided. The #pragma HLS DATAFLOW is adopted to infer task-level parallelism, thus allowing the overlap of the computations of both the layers.
Listing 3
The pseudocode of the TCNN for image decompression

4.2 Evaluation of #pragmas, Bit-Width and Parallelism
To evaluate the effectiveness of #pragmas, as well as the influence of bit-width and parallelism, an extensive design-space exploration is carried out, using the XC7Z020 FPGA device at f = 100 MHz. Two types of HLS designs are considered:
-
Baseline designs, containing the minimum number of #pragmas to ensure the correct behavior of the synthesized circuits.
-
Optimized designs, containing additional #pragmas, to allow the circuits to meet hardware-oriented features, including pipelining and parallelism.
Table 3 summarizes the used #pragmas, by clarifying their behavior in hardware, and taking into account both the baseline designs and the optimized counterparts.
Results in terms of resources utilization are shown in Fig. 7a−d. Each plot refers to a specific type of resource (i.e., LUTs, DSPs, FFs, BRAMs, respectively). The labels reported in the Configurations axis must be interpreted as (type of implementation-TIC,TOC), where type of implementation can be ‘base’ for the baseline designs and ‘opt’ for the optimized versions. Bars of different colors refer to different bit-widths.

Resources utilization of different configuration of the TCONV-based decoder: a LUTs, b DSPs, c FFs, d BRAMs.
LUTs in Fig. 7a are mainly exploited for computations and control. To understand the impact of #pragmas, we consider the configurations having (TIC,TOC) = (2,4) as an example. The optimized versions use more resources. This is justified by the use of #pragma HLS PIPELINE that inherits the #pragma HLS UNROLL to allow loops bodies to perform the computations in parallel. For instance, when N = 6, the optimized version adopts ~ 2.5× more LUTs.
DSPs are used, in conjunction with LUTs, for computation purposes. Accordingly, the optimized versions, relying in loop unrolling and pipelining, ask for more DSPs, as highlighted in Fig. 7b. For example, fixed N = 8, the configuration (opt-2,2) requires 14.5× more DSPs than the configuration (base-2,2). As a further consideration, it is worth noting that N differently affects DSPs and LUTs utilization trends. As an example, taking into account the optimized designs only, while LUTs utilization progressively increases varying N from 8 to 6, for DSPs a downward trend occurs. Indeed, while the amount of occupied LUTs grow by a 2.1× factor, the amount of utilized DSPs decrease up to 95%. Below 6 bits, the DSPs utilization is steady, while the LUTs utilization progressively decreases. This means that, while the synthesizer infers multiplications and additions using DSPs predominantly in the range 8–6 bits, it relies on LUTs for lower bit-widths.
Figure 7c shows that, given that FFs mainly equip with pipelining the combinatorial paths, their utilization follows the LUTs trend. Conversely, BRAMs are exploited to buffer weights on-chip and to temporary store ofmaps before being delivered either to the subsequent TCONV layer or as final outputs. While the optimized configurations make use of proper #pragmas to instruct the synthesizer to split and place memory arrays into on-chip RAMs (i.e., #pragma HLS ARRAY_PARTITION and #pragma HLS RESOURCE), the baseline designs completely leverage the synthesizer to arrange data storage. Let us compare the configurations (base-1,1) and (opt-1,1) at various N. As visible in Fig. 7d, at a fixed configuration in terms of input and output parallelism, the baseline designs have an irregular trend, whereas the optimized configurations have a constant trend, meaning that they use the same number of BRAMs for each bit-width. This is due to the above mentioned #pragmas that instruct the synthesizer to leave BRAMs implementation independent of the bit-width. Finally, as expected, for both the baseline and the optimized configurations, higher (TIC,TOC) pairs mean higher memory requirements.
Figure 8 illustrates the frame rate variations versus N by means of a heat map. The optimized designs improve considerably the performance of the decoder, in a range of 2 to 3 orders of magnitude. While a higher parallelism obviously leads to a higher throughput, the latter is independent of the bit-width. Indeed, the #pragma HLS PIPELINE (thus, #pragma HLS UNROLL) makes the circuit able to perform parallel computations independently of the data word-length.

Throughput trend of different configurations of the TCONV-based decoder.
Finally, in order to provide a trade-off picture of the whole set of experiments, Fig. 9 plots the average resources utilization versus the throughput. The average resources utilization is the average of the percentages of each type of resource (i.e., LUTs utilization, FFs utilization, BRAMs utilization, DSPs utilization). For the sake of clear visualization, both the axes use the logarithmic scale. Each point is labeled to represent a specific configuration: indicating the design type (i.e., baseline as ‘b’, optimized as ‘o’), the bit-width N and the TOC factor. For example, o62 represents the optimized design with N = 6 and output parallelism factor TOC = 2. The green points refer to the configurations that satisfy the minimum accuracy threshold for both MNIST and Fashion-MNIST datasets, while red points fail in meeting these accuracy thresholds, based on our previous study [17].

Trade-off analysis of different configurations of the TCONV-based decoder. Each point represents a specific configuration: the first letter indicates the design type (i.e., baseline configuration as ‘b’, optimized configuration as ‘o’); the second value is the bit-width N; the third value is the output parallelism (i.e., the TOC factor).
Two main regions can be identified within the plot of Fig. 9: on the left, the baseline designs, whereas on the right the optimized counterparts. For what concerning the fps, a proper usage of #pragmas to infer parallelism leads to an overall 3 orders of magnitude improvement. However, higher throughput means higher resources requirements. Despite this, even considering the worst-case configuration o84, the average utilization is limited to 16%. Figure 10 magnifies the baseline designs points. While the fps does not significantly changes, a more noticeable variation occurs in terms of the average percentage of resources utilization. As expected, the higher the data bit-width N the higher the resources occupation. This because wider bit-widths reflect on wider computing units (i.e., multipliers and adders), thus increasing the quantity of LUTs and FFs. Furthermore, as expected, higher TOC lead to higher resources occupation. Finally, the configuration b41 requires the lowest amount of resources, while the configurations b64, b54, b44 employ the lowest amount of clock cycles to complete the computations.

Detail of trade-off analysis of the baseline configurations TCONV-based decoder. Each point represents a specific configuration: the first letter indicates the design type (i.e., baseline configuration ‘b’); the second value is the bit-width N; the third value is the output parallelism (i.e., the TOC factor).
5 Characterization of the Generator of the DCGAN Architecture
In order to further investigate the suitability of the proposed TCONV layer for dataflow architectures, we consider the DCGAN network. Specifically, considering the quality results over the MNIST dataset [34], we propose an FPGA accelerator dealing with 5-bit weights and activations. The chosen quantization ensures all the weights to be preliminary stored on-chip and the off-chip memory accesses to retrieve data to be reduced.
5.1 The HLS DCGAN Template
Listing 4 shows the top-level pseudocode of the C++ model. The first Project and Reshape layer is supplied by a 1 × 1 × 100 activations and 256 × 100 × 4 × 4 weights, and performs TCONVs having K = 4 and S = 1. The resulting 256 4 × 4 fmaps are supplied to the second layer, that executes TCONVs having K = 4 and S = 2. The same for the third and the fourth layers, which progressively up-sample fmaps from 8 × 8 to 32 × 32. The second and the third layers are also equipped with ReLU non-linearity [32].
Listing 4
The pseudocode of the generator of the DCGAN model

With respect to the decoder analyzed in Section 4, the DCGAN requires reusing the fmaps to manage internal layers with more than one 3-D filter. Indeed, all the 3-D filters need the same activations to generate as many ofmaps. However, due to the streaming behavior of the architecture, the activations provided by the current layer are generated once and consumed by the next layer as soon as possible. As a consequence, a buffer at the interface is mandatory. This is the meaning of the DataBuffer function reported in Listing 4 and placed between the Layers 1–2 (line 5) and 2–3 (line 7). No extra buffering is needed between the Layers 3 and 4, in that the latter uses just one 3-D filter to provide the output image.
5.2 Characterization and State-of-the-Art Comparisons
The architecture is implemented within the XC7Z045 FPGA and characterized over different parallelism configurations. Table 4 reports the resources utilization, the achieved clock frequency, the throughput (fps), the power dissipation, the energy dissipation, and the energy efficiency. Power was estimated considering the post-implementation results and using the power analysis tool. Energy was computed considering the power results and the latency to process one image through the entire DCGAN architecture. The configurations array refers to the parallelism factor TOC of each layer. For example, the configuration (2,2,2,1) indicates that the first, the second, and the third layers exhibit an output parallelism TOC = 2, while the last layer has TOC = 1.
Obviously, the higher the overall parallelism, the better the throughput. An improvement of ~ 4.6× is achieved with the most parallelized configuration (2,4,2,1) compared with the sequential (1,1,1,1) configuration, whilst power dissipation grows from 0.34W to 0.74W due to increased BRAM use. In addition, N = 5 practically nullifies the use of DSPs for computations, thus removing a not-negligible source of power consumption.
Parallelism positively impacts the energy dissipation. Indeed, a ~ 2.15× reduction is evident when moving from the baseline (1,1,1,1) configuration to the most parallelized counterpart (2,4,2,1). Considering the slight increase in power, the referred result is mainly due to the higher speed performance (i.e., the fps).
Finally, the configuration (2,4,2,1) is compared to some state-of-the-art counterparts, as reported in Table 5. With respect to the architecture presented in [21], the proposed accelerator shows a 7.3× improvement in terms of energy efficiency, even at 1.7× lower throughput. The power saving is motivated by the fact that the novel engine accommodates all the needed TCONV Layers on chip, as well as the required filter weights, thus limiting the off-chip memory accesses. In addition, the data treatment at 5-bit shrinks the area occupation for computations significantly; indeed, the 16-bit counterpart hugely adopts DSPs, while the new design takes just 1 DSP. It is also worth underlining that the counterpart [21] takes advantage of the high-performance Alveo U200 device: it achieves the 300 MHz clock frequency, thus improving the fps.
In comparison with [24], at a parity of the FPGA device used and of the clock frequency, the architecture presented here is ~ 29.7% faster and exhibits an energy efficiency more than 10× higher. This is the direct consequence of the extra logic exploited in [24] to meet the transformations steps of the Winograd-based TCONV algorithm, as well as the high level of parallelism.
Finally, Table 5 shows that the 16-bit DCGAN accelerator [28] accommodated within the high-end XC7VX690T FPGA device reaches the best throughput but at expense of a considerable amount of resources: it occupies ~ 13.26×, ~ 23.47×, ~ 3.56× more LUTs, FFs, on-chip BRAMs, respectively, than the new design.
6 Conclusions
This paper presented the design of an HLS-based TCONV layer, based on the IOM strategy, and suitable for dataflow-based neural network architectures. The latter consist of stacked layers that exchange data internally, by reducing the data movement from/to external memory resources. The accelerator was conceived at the C++ abstraction, using a parametric template to be adapted at different configurations using proper bit-widths, kernel sizes, strides, image sizes, parallelism factors. For purposes of characterization, the proposed engine was preliminarily examined as a standalone unit and then integrated into two neural networks: a decoder for image decompression, and the generator of the DCGAN network.
The standalone TCONV layer showed competitiveness when compared the state-of-the-art, being able to provide up to 6.25 Gout/s and dissipating only 1.53 W, using ~ 11.7k LUTs resources and 4.52 Mb of on-chip memory.
When used within the decoder architecture, a systematic design-space exploration was conducted to investigate the positive influence of #pragmas to infer hardware optimizations, including pipelining and parallelism. The evaluation ranges in the interval 8–4 bits and showed an improvement of 3 orders of magnitude in fps throughput, with an average resources utilization of at most 16%. Finally, the characterization of the DCGAN at 5 bits highlighted a noticeable throughput of 240 fps, with an energy efficiency of 324.32 fps/W, which outperforms the state-of-the-art counterparts by a factor of at least ~ 7.3×.
Data Availability Statement
The dataset generated during the current study is available from the authors on request.
References
Voulodimos, A., Doulamis, N., Doulamis, A., & Protopapadakis, E. (2018). Deep Learning For Computer Vision: A Brief Review. Computational Intelligence and Neuroscience, 2018, 1–13. https://doi.org/10.1155/2018/7068349
Nassif, A. B., Shahin, I., Attili, I., Azzeh, M., & Shaalan, K. (2019). Speech recognition using deep neural networks: A systematic review. IEEE Access, 7, 19143–19165. https://doi.org/10.1109/ACCESS.2019.2896880
Wang, Z., & Majewicz Fey, A. (2018). Deep learning with convolutional neural network for objective skill evaluation in robot-assisted surgery. International Journal of Computer Assisted Radiology and Surgery, 13(12), 1959–1970. https://doi.org/10.1007/s11548-018-1860-1
Creswell, A., White, T., Dumoulin, V., Arulkumaran, K., Sengupta, B., & Bharath, A. A. (2018). Generative adversarial networks: An overview. IEEE Signal Processing Magazine, 35(1), 53–65. https://doi.org/10.1109/MSP.2017.2765202
Kumar, M., & Sharma, H. K. (2023). A GAN-Based Model of Deepfake Detection in Social Media. Procedia Computer Science, 218, 2153–2162. https://doi.org/10.1016/j.procs.2023.01.191
Im, D., Han, D., Choi, S., Kang, S., & Yoo, H. J. (2020). DT-CNN: An energy-efficient dilated and transposed convolutional neural network processor for region of interest based image segmentation. IEEE Transactions on Circuits and Systems I: Regular Papers, 67(10), 3471–3483. https://doi.org/10.1109/TCSI.2020.2991189
Gu, Z., Cheng, J., Fu, H., Zhou, K., Hao, H., Zhao, Y., Zhang, T., Gao, S., & Liu, J. (2019). Ce-net: Context encoder network for 2d medical image segmentation. IEEE Transactions on Medical Imaging, 38(10), 2281–2292. https://doi.org/10.1109/TMI.2019.2903562
Dong, C., Loy, C. C., & Tang, X. (2016). Accelerating the super-resolution convolutional neural network. In European Conference on Computer Vision (ECCV) (pp. 391–407). Springer, Cham. https://doi.org/10.1007/978-3-319-46475-6_25
Spagnolo, F., Corsonello, P., Frustaci, F., & Perri, S. (2023). Design of a Low-power Super-Resolution Architecture for Virtual Reality Wearable Devices. IEEE Sensors Journal, 23(8), 9009–9016. https://doi.org/10.1109/JSEN.2023.3256524
Chang, J. W., Kang, K. W., & Kang, S. J. (2020). An energy-efficient FPGA-based deconvolutional neural networks accelerator for single image super-resolution. IEEE Transactions on Circuits and Systems for Video Technology, 30(1), 281–295. https://doi.org/10.1109/TCSVT.2018.2888898
Nurvitadhi, E., Venkatesh, G., Sim, J., Marr, D., Huang, R., Ong Gee Hock, J., Liew, Y. T., Srivatsan, K., Moss, D., Subhaschandra, S., & Boudoukh, G. (2017). Can FPGAs beat GPUs in accelerating next-generation deep neural networks? In Proceedings of the 2017 ACM/SIGDA International Symposium on Field-Programmable Gate Arrays (FPGA) (pp. 5–14). ACM. https://doi.org/10.1145/3020078.3021740
Yazdanbakhsh, A., Brzozowski, M., Khaleghi, B., Ghodrati, S., Samadi, K., Kim, N. S., & Esmaeilzadeh, H. (2018). FlexiGAN: An end-to-end solution for FPGA acceleration of generative adversarial networks. In 2018 IEEE 26th Annual International Symposium on Field-Programmable Custom Computing Machines (FCCM) (pp. 65–72). IEEE. https://doi.org/10.1109/FCCM.2018.00019
Sestito, C., Spagnolo, F., & Perri, S. (2021). Design of Flexible Hardware Accelerators for Image Convolutions and Transposed Convolutions. Journal of Imaging, 7(10):210, 1–16. https://doi.org/10.3390/jimaging7100210
Zhang, X., Das, S., Neopane, O., & Kreutz-Delgado, K. (2017). A Design Methodology for Efficient Implementation of Deconvolutional Neural Networks on an FPGA. arXiv preprint arXiv:1705.02583.
Blott, M., Preußer, T. B., Fraser, N. J., Gambardella, G., & O’brien, K., Umuroglu, Y., Leeser, M., & Vissers, K. (2018). FINN-R: An end-to-end deep-learning framework for fast exploration of quantized neural networks. ACM Transactions on Reconfigurable Technology and Systems (TRETS), 11(3), 1–23. https://doi.org/10.1145/3242897
Stewart, R., Nowlan, A., Bacchus, P., Ducasse, Q., & Komendantskaya, E. (2021). Optimising hardware accelerated neural networks with quantisation and a knowledge distillation evolutionary algorithm. Electronics, 10(4):396, 1–21. https://doi.org/10.3390/electronics10040396
Sestito, C., Perri, S., & Stewart, R. (2022). Design-Space Exploration of Quantized Transposed Convolutional Neural Networks for FPGA-based Systems-on-Chip. In 2022 IEEE Intl Conf on Dependable, Autonomic and Secure Computing, Intl Conf on Pervasive Intelligence and Computing, Intl Conf on Cloud and Big Data Computing, Intl Conf on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech) (pp. 1–6). IEEE. https://doi.org/10.1109/DASC/PiCom/CBDCom/Cy55231.2022.9927825
LeCun, Y., Cortes, C., & Burges, C. J. (1998). The MNIST database of handwritten digits. Retrieved from http://yann.lecun.com/exdb/mnist/
Xiao, H., Rasul, K., & Vollgraf, R. (2017). Fashion-mnist: a novel image dataset for benchmarking machine learning algorithms. arXiv preprint arXiv:1708.07747. https://doi.org/10.48550/arXiv.1708.07747
Radford, A., Metz, L., & Chintala, S. (2015). Unsupervised representation learning with deep convolutional generative adversarial networks. arXiv preprint arXiv:1511.06434. https://doi.org/10.48550/arXiv.1511.06434
Meng, Y., Kuppannagari, S., Kannan, R., & Prasanna, V. (2021, December). How to Avoid Zero-Spacing in Fractionally-Strided Convolution? A Hardware-Algorithm Co-Design Methodology. In 2021 IEEE 28th International Conference on High Performance Computing, Data, and Analytics (HiPC) (pp. 81–90). IEEE. https://doi.org/10.1109/HiPC53243.2021.00022
Mao, W., Lin, J., & Wang, Z. (2020). F-DNA: Fast convolution architecture for deconvolutional network acceleration. IEEE Transactions on Very Large Scale Integration (VLSI) Systems, 28(8), 1867–1880. https://doi.org/10.1109/TVLSI.2020.3000519
Yu, Y., Zhao, T., Wang, M., Wang, K., & He, L. (2020). Uni-OPU: An FPGA-based uniform accelerator for convolutional and transposed convolutional networks. IEEE Transactions on Very Large Scale Integration (VLSI) Systems, 28(7), 1545–1556. https://doi.org/10.1109/TVLSI.2020.2995741
Di, X., Yang, H. G., Jia, Y., Huang, Z., & Mao, N. (2020). Exploring efficient acceleration architecture for Winograd-transformed transposed convolution of GANs on FPGAs. Electronics, 9(2):286, 1–21. https://doi.org/10.3390/electronics9020286
Marrazzo, E., Spagnolo, F., & Perri, S. (2022). Runtime Reconfigurable Hardware Accelerator for Energy-Efficient Transposed Convolutions. In 2022 17th Conference on Ph. D Research in Microelectronics and Electronics (PRIME) (pp. 141–144). IEEE. https://doi.org/10.1109/PRIME55000.2022.9816800
Yan, J., Yin, S., Tu, F., Liu, L., & Wei, S. (2018). GNA: Reconfigurable and efficient architecture for generative network acceleration. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 37(11), 2519–2529. https://doi.org/10.1109/TCAD.2018.2857258
Perri, S., Sestito, C., Spagnolo, F., & Corsonello, P. (2020). Efficient deconvolution architecture for heterogeneous systems-on-chip. Journal of Imaging, 6(9):85, 1–17. https://doi.org/10.3390/jimaging6090085
Wang, D., Shen, J., Wen, M., & Zhang, C. (2019). Efficient implementation of 2D and 3D sparse deconvolutional neural networks with a uniform architecture on FPGAs. Electronics, 8(7):803, 1–13. https://doi.org/10.3390/electronics8070803
Lavin, A., & Gray, S. (2016). Fast algorithms for convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (pp. 4013–4021). IEEE. https://doi.org/10.1109/CVPR.2016.435
Liu, S., Fan, H., Niu, X., Ng, H. C., Chu, Y., & Luk, W. (2018). Optimizing CNN-based segmentation with deeply customized convolutional and deconvolutional architectures on FPGA. ACM Transactions on Reconfigurable Technology and Systems (TRETS), 11(3), 1–22. https://doi.org/10.1145/3242900
ARM. (2012). AMBA 4 AXI4, AXI4-Lite, and AXI4-Stream Protocol Assertions User Guide. Retrieved from https://developer.arm.com/documentation/dui0534/b/
Hara, K., Saito, D., & Shouno, H. (2015). Analysis of function of rectified linear unit used in deep learning. In 2015 International Joint Conference on Neural Networks (IJCNN) (pp. 1–8). IEEE. https://doi.org/10.1109/IJCNN.2015.7280578
AMD Xilinx. (2020). Vivado Design Suite User Guide: High-Level Synthesis. UG902 (v2019.2). Retrieved from https://www.xilinx.com/content/dam/xilinx/support/documents/sw_manuals/xilinx2019_2/ug902-vivado-high-level-synthesis.pdf
Sestito, C., Perri, S., & Stewart, R. (2022). Accuracy Evaluation of Transposed Convolution-Based Quantized Neural Networks. In 2022 International Joint Conference on Neural Networks (IJCNN) (pp. 1–8). IEEE. https://doi.org/10.1109/IJCNN55064.2022.9892671
Funding
Open access funding provided by Università della Calabria within the CRUI-CARE Agreement. This work was supported by POR Calabria FSE/FESR 2014-2020 – International Mobility of PhD students and research grants/type A Researchers” – Actions 10.5.6 and 10.5.12 actuated by Regione Calabria, Italy, and by Ministero dell'Università e della Ricerca under ICSC National Research Centre for High Performance Computing, Big Data and Quantum Computing within the Next Generation EU program.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Competing Interests
The authors declare no conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sestito, C., Perri, S. & Stewart, R. FPGA Design of Transposed Convolutions for Deep Learning Using High-Level Synthesis. J Sign Process Syst 95, 1245–1263 (2023). https://doi.org/10.1007/s11265-023-01883-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11265-023-01883-7