
Abstract
By using the two distinct methods known as the \(\exp (-\phi (\eta ))\) and the \(Exp_a\)-function methods, various forms of soliton solutions of the modified equal width wave equation (MEWE) with beta time derivative (BTD) are produced in this study. This model is used as a model in partial differential equations for the simulation of one-dimensional wave transmission in nonlinear media with dispersion processes. The obtained solutions are in the form of rational, trigonometry and hyperbolic trigonometry functions. Using Mathematica software, the resulting solitons are validated. Graphs are also used at the conclusion to explain the findings. These soliton solutions imply that these two methods are more dependable, simple and efficient than other methods. The findings can be used to explain how studious structures and other comparable non-linear physical structures are substantially understood. The obtained results are very helpful in the fields of optics, kinetics solid-state physics and hydro-magnetic waves in cold plasma.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Because they are used in practical sciences, nonlinear partial differential equations (NLPDEs) are quite important. In various physical or applied domains, including quantum physics, fluid mechanics, applied chemistry, optics, and many more, NLPDEs always represent some nonlinear physical phenomena. In the structures of mathematical NLPDEs, the nonlinear Schrödinger equations (NLSE) are some significant model equations that represent the physical phenomena. Furthermore, FDEs are the generalized versions of nonlinear fractional differential equations (NLFDEs). For example, Two-Sided Beta Time Fractional Korteweg–de Vries Equations (Akter et al. 2023), space fractional parameter on nonlinear ion acoustic shock wave excitation (Uddin et al. 2022b), fractional resonant nonlinear Schrodinger equations (Hafez et al. 2019), beta derivative spatial–temporal evolution (Uddin et al. 2021; Uddin and Hafez 2020), Heisenberg model of ferromagnetic spin chains with beta derivative evolution (Uddin et al. 2022c), space–time fractional cubic–quartic nonlinear Schrödinger equation (Uddin et al. 2022a). The most crucial objective is to use some trustworthy methods to determine their approximative and analytical solutions. The precise solitary wave solutions of any FDE, among other types of solutions, are very important for understanding the related physics. Bilinear residual network method (Zhang and Li 2022) and Bilinear neural network method (Zhang and Bilige 2019; Zhang et al. 2021a, b) can obtain accurate analytical solution for partial differential equation, which is far more accurate than traditional neural network numerical method. The NLFDE wave solutions have been secured using a variety of analytical techniques (Hosseini et al. 2020; Kudryashov 2020; Bekir 2008; Rezazadeh et al. 2019; Wang et al. 2021; Shen and Tian 2021; Gao et al. 2021a; Yang et al. 2021; Gao et al. 2021b, c, d; Gao et al. 2021; Khatun et al. 2022; Arefin et al. 2022; Zaman et al. 2023a, b, c; Volkan 2023; Iqbal et al. 2022; Shen et al. 2021, 2022, Zou and Guo 2023; Song et al. 2020; Li et al. 2023; Li and Guo 2023; Yang et al. 2018; Guo et al. 2020). The periodic type wave solutions to the Kundu–Mukherjee–Naskar (KMN) equation in \((2+1)-\)-dimension have been investigated using the variational principle method (He 2020). In the field of optics, the Riccati equation method (Malomed et al. 2005) has also been used to secure a number of optical solitons.
The MEWE is a different significant model. By using diverse methodologies, various soliton solutions have been discovered (Zafar et al. 2020; Malfliet 1992; Raslan et al. 2017; Shi and Zhang 2019; Atangana et al. 2016; Atangana and Alqahtani 2016; Yépez-Martínez et al. 2018; Yusuf et al. 2019; Uddin et al. 2021; Ghanbari and Gómez-Aguilar 2019; Arshed 2020; Arshad et al. 2019; Raza et al. 2019; Akram et al. 2018; Hosseini et al. 2017). The fractional BTD has a few useful properties that are listed in Yépez-Martínez et al. (2018), Yusuf et al. (2019), Uddin et al. (2021), Ghanbari and Gómez-Aguilar (2019) and Zaman et al. (2023d).
Finding soliton solutions to the MEWE with BTD is the primary goal of this study. To complete the aforementioned work, the beta derivative is used in conjunction with the \(\exp (-\phi (\eta ))\) method and the \(Exp_a\)-function approaches.
2 Description of model
The modified equal width equation is a class of FPDE describing optics, solid-state physics and hydro-magnetic waves in cold plasma. This model is used as a model in partial differential equations for the simulation of one-dimensional wave transmission in nonlinear media with dispersion processes. This equation plays a significant role in fluid mechanics. The MEWE (Shi and Zhang 2019; Islam et al. 2020) is given:
where \(\theta\) and \(\rho\) are parameters.
We take travelling wave transformations:
where \(\omega\) and \(\lambda\) are the constants.
The use of Eq. (2) into the Eq. (1), yields the ordinary differential equation (ODE):
From Eq. (3) with respect to \(\eta\), we acquire
2.1 Explanation of the \(Exp(-\phi (\eta ))\) method
The \(Exp(-\phi (\eta ))\) method is given by the following steps (Arshed 2020).
Step 1
where \(q=q(x, t)\) depend on x and t and is a differentiable function. Now assume the given wave transformation:
where \(\mu\) is the wave speed. Putting the Eq. (6) into Eq. (5), taking the below nonlinear ordinary differential equation (NODE):
The Eq. (7) has the following solutions by the \(\exp (-\phi (\eta ))\) method:
Step 2 We look for answers to Eq. (7) in the following format:
here \(\alpha _{j}\) \(\ne 0\) to be found.
The function \(\phi (\eta )\) fulfil the below auxiliary differential equation:
Equation (9) gives the following solution.
Case 1: If \(B^{2}-4A>0\) and \(A\ne 0\),
Case 2: If \(B^{2}-4A<0\) and \(A\ne 0\),
Case 3: If \(B^{2}-4A>0\) , \(A=0\) and \(B\ne 0\),
Case 4: If \(B^{2}-4A=0\) , \(A\ne 0\) and \(B\ne 0\),
Case 5:
If \(B^{2}-4A=0\) , \(A=0\) and \(B=0\),
here C is the integration constant.
Step 3 The positive integer ‘m’ will be calculated with the help of homogenous balance technique (HBT) between the highest derivative and the non-linear term in the Eq. (7).
We will obtain the solutions of the NLPDE Eq. (5) by using the above steps.
2.2 Solutions with the \(Exp(-\phi (\eta ))\) method
Balancing the terms \(Q^{3}\) and \(Q^{''}\) in Eq. (4) by homogeneous technique, we acquire \(m=1\). For \(m=1\), Eq. (8) yields
Here \(\alpha _0\) and \(\alpha _1\) are unknown parameters. A polynomial in powers of \(\phi\) is produced when the Eqs. (15) and (9) are combined in the Eq. (4). We acquire a set of equations by setting the coefficients for each power and constant term to be equal to 0. Using Mathematica, we discover:
Set 1:
Case 1:
If \(B^{2}-4A>0\) and \(A\ne 0\),

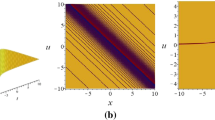
Graph of \((Exp(-\phi (\eta ))\) Method) Set 1, Case 1 \(\lambda =-0.3,\rho =1,\beta =1,\theta =2,B=0.5, -10<x<10, 0<t<2\)

Graph of (\(Exp(-\phi (\eta ))\) Method) Set 1, Case 1 \(\lambda =-0.3,\rho =1,t=1,\theta =2,B=0.5, -10<x<10\)

Graph of (\(Exp(-\phi (\eta ))\) Method) Set 1, Case 1 \(\lambda =-0.3,\rho =1,\theta =2,B=0.5, -10<x<10, 0<t<2\)
Case 2:
If \(B^{2}-4A<0\) and \(A\ne 0\),

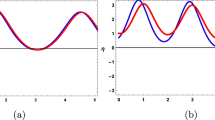
Graph of (\(Exp(-\phi (\eta ))\) Method) Set 1, Case 2 \(\lambda =-0.2,\rho =1,\beta =1,\theta =2,B=0.5, -10<x<10, 0<t<2\)

Graph of (\(Exp(-\phi (\eta ))\) Method) Set 1, Case 2 \(\lambda =-0.2,\rho =1,t=1,\theta =2,B=0.5, -10<x<10\)

Graph of (\(Exp(-\phi (\eta ))\) Method) Set 1, Case 2 \(\lambda =-0.2,\rho =1,\theta =2,B=0.5, -10<x<10, 0<t<2\)
Case 3:
If \(B^{2}-4A>0\) , \(A=0\) and \(B\ne 0\),

Graph of (\(Exp(-\phi (\eta ))\) Method) Set 1, Case 3 \(\lambda =-1, \rho =1.5, \beta =1, \theta =2, B=0.5,-10<x<10, 0<t<2\)

Graph of (\(Exp(-\phi (\eta ))\) Method) Set 1, Case 3 \(\lambda =-1, \rho =1.5, t=1, \theta =2, B=0.5, -10<x<10\)

Graph of (\(Exp(-\phi (\eta ))\) Method) Set 1, Case 3 \(\lambda =-1, \rho =1.5, \theta =2, B=0.5, -10<x<10, 0<t<2\)
Case 4:
If \(B^{2}-4A=0\) , \(A\ne 0\) and \(B\ne 0\),
Case 5:
If \(B^{2}-4A=0\), \(A=0\) and \(B=0\),
Set 2:
Case 1:
If \(B^{2}-4A>0\) and \(A\ne 0\),
Case 2:
If \(B^{2}-4A<0\) and \(A\ne 0\),
Case 3:
If \(B^{2}-4A>0\) , \(A=0\) and \(B\ne 0\),
Case 4:
If \(B^{2}-4A=0\) , \(A\ne 0\) and \(B\ne 0\),
Case 5:
If \(B^{2}-4A>0\) , \(A=0\) and \(B=0\),
2.3 Explanation of the \(Exp_a\) function method
We regard Eqs. (5)–(7). We assume that Eq. (7) has the following solution (Zayed and Al-Nowehy 2017; Zafar 2019):
here \(\alpha _{j}\) and \(\beta _{j} (0\le j\le m)\) are unknown parameters and to be find later. The positive integer m is determined by using HBT into Eq. (7). Inserting Eq. (28) into Eq. (7), yield
Putting \(\ell _j~(0\le j\le t)\) into Eq. (7) equal to zero, so we acquire.
We achieve the wave soltions of Eq. (5).
2.4 Solutions with the \(Exp_a\) function method
Balancing the terms \(Q^{3}\) and \(Q^{''}\) into the Eq. (4) by homogeneous technique, we acquire \(m=1\). For \(m=1\), Eq. (28) reduces into:
where \(\alpha _0\), \(\alpha _1\) , \(\beta _0\) and \(\beta _1\) are unknowns. A set of equations is acquired by entering Eq. (31) into the Eq. (4) and setting the coefficients of each power and constant term to 0. Using Mathematica, we discover:
Set 1:
By using the Eqs. (32) and (31) into Eq. (2), we acquire

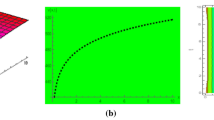
Graph of (\(Exp_a\) function method) Set 1, Case 1 \(\lambda =1.1,\rho =0.6,\beta _0=0.4,\beta _1=0.3,\theta =0.5, -10<x<10, 0<t<2\)

Graph of (\(Exp_a\) function method) Set 1, Case 1 \(\lambda =1.1,\rho =0.6,\beta _0=0.4,\beta _1=0.3,\theta =0.5, -10<x<10, t=1\)

Graph of (\(Exp_a\) function method) Set 1, Case 1 \(\lambda =1.1,\rho =0.6,\beta _0=0.4,\beta _1=0.3,\theta =0.5,-10<x<10, 0<t<2\)
Set 2:
The use of the Eqs. (34) and (31) into Eq. (2), we acquire
3 Physical explanation
Here we present the physical significance of the above mentioned solutions to the beta-time fractional modified equal width equation. Plotting these solutions in 2-D at different time levels and different values of \(\beta\) and 3-D. We found interesting behaviors, depending on the values of the free constants in the gained solutions as shown in the figures. Figure 1; represents the dark soliton solution for the values \(\lambda =-0.3,\rho =1,\beta =1,\theta =2,B=0.5, -10<x<10, 0<t<2\) Figure 2; represents the dark soliton solution for the values \(\lambda =-0.3,\rho =1,t=1,\theta =2,B=0.5, -10<x<10\). Figure 3; represents the dark soliton solution for the values \(\lambda =-0.3,\rho =1,\theta =2, B=0.5, -10<x<10, 0<t<2\). Figure 4; represents the periodic soliton solution for the values \(\lambda =-0.2,\rho =1,\beta =1,\theta =2,B=0.5, -10<x<10, 0<t<2\). Figure 5; represents the periodic soliton solution for the values \(\lambda =-0.2,\rho =1,t=1,\theta =2,B=0.5, -10<x<10\). Figure 6; represents the periodic soliton solution for the values \(\lambda =-0.2,\rho =1,\theta =2,B=0.5, -10<x<10, 0<t<2\). Figure 7; represents the kink wave soliton solution for the values \(\lambda =-1, \rho =1.5, \beta =1, \theta =2, B=0.5,-10<x<10, 0<t<2\). Figure 8; represents the kink wave soliton solution for the values \(\lambda =-1, \rho =1.5, t=1, \theta =2, B=0.5, -10<x<10\). Figure 9; represents the kink wave soliton solution for the values \(\lambda =-1, \rho =1.5, \theta =2, B=0.5, -10<x<10, 0<t<2\). Figure 10; represents the rational wave solution for the values \(\lambda =1.1,\rho =0.6,\beta _0=0.4,\beta _1=0.3,\theta =0.5, -10<x<10, 0<t<2\). Figure 11; represents the rational wave solution for the values \(\lambda =1.1,\rho =0.6,\beta _0=0.4,\beta _1=0.3,\theta =0.5, -10<x<10, t=1\). Figure 12; represents the rational wave solution for the values \(\lambda =1.1,\rho =0.6,\beta _0=0.4,\beta _1=0.3,\theta =0.5,-10<x<10, 0<t<2\). The results of this work come with a lot of encouragement for further future discussion in different branches of science, especially in nonlinear optics and ocean engineering.
4 Results and discussion
Here we will compare the existing results and our obtained results of the concerned model. In Raslan et al. (2017), travelling wave solutions are obtained by using the modified extended tanh method. Kink solitons, periodic solitons and other soliton solutions of modified equal width equation with fractional derivative operator in the sense of Caputo are gained in Ali et al. (2022). Explicit and periodic solutions are obtained by applying extended simple equation and \(\exp (-\varphi (\xi ))\) methods in Lu et al. (2018). While we obtained the rational and other type of soliton solutions in the sense of beta-time derivative operator. Hence,our gained results are new and different from the existing results in the literature.
5 Conclusion
We have succussed to gain the singular and other type of soliton solutions of MEWE along BTD by applying the two different methods: \(\exp (-\phi (\eta ))\) and the \(Exp_a\) function methods. The acquired results are verified and also describe by figures. The first application of the BTD to this model is made in this study, and the results are crucial for the field’s continued advancement. The use of fractional derivative provides the more accurate results than the other. Impact of beta-time derivative is shown by graphically. The variable-order differential equation is a powerful mathematical model for describing difficult dynamical situations. Therefore, beta-time fractional derivative is used for the modified equal width equation so that the concerning model may be describe in a simple way.This research suggest that the used methods are simple, reliable and fruitful. As we all know, in the field of integrable systems, there is no general method to solve the Analytical solution of the nonlinear partial differential equation. The symbol calculation method based on neural networks proposed by Zhang et al. (2020, 2021b, 2022, 2023) open up a general symbolic computing path for the analytic solution of Nonlinear partial differential equation, and lays the foundation for the universal method of symbolic calculation of Analytical expression. The problems studied in this paper can be solved by using this method in the future work.
Availability of data and materials
No applicable.
References
Akram, G., Batool, F., Riaz, A.: Two reliable techniques for the analytical study of conformable time-fractional Phi-four equation. Opt. Quant. Electron. 50, 22 (2018)
Akter, S., Hossain, M.D., Uddin, M.F., Hafez, M.G., et al.: Collisional solitons described by two-sided beta time fractional Korteweg–de Vries equations in fluid-filled elastic tubes. Adv. Math. Phys. (2023). https://doi.org/10.1155/2023/9594339
Ali, U., Ahmad, H., Baili, J., Botmart, T., Aldahlan, M.A.: Exact analytical wave solutions for space–time variable-order fractional modified equal width equation. Results Phys. 33, 105216 (2022)
Arshad, M., Seadawy, A.R., Lu, D.: Study of soliton solutions of higher-order nonlinear Schrödinger dynamical model with derivative non-Kerr nonlinear terms and modulation instability analysis. Results Phys. 13, 102305 (2019)
Arshed, S.: New soliton solutions to the perturbed nonlinear Schrödinger equation by \(\exp (-\phi (\eta ))\) expansion method. Optik 220, 165123 (2020)
Atangana, A., Alqahtani, R.T.: Modelling the spread of river blindness disease via the Caputo fractional derivative and the beta-derivative. Entropy 18, 40 (2016)
Atangana, A., Baleanu, D., Alsaedi, A.: Analysis of time-fractional Hunter–Saxton equation: a model of neumatic liquid crystal. Open Phys. 14, 145–149 (2016)
Bekir, A.: Application of the extended tanh method for coupled nonlinear evolution equation. Commun. Nonlinear Sci. Numer. Simul. 13, 1748–1757 (2008)
Gao, X.-T., Tian, B., Shen, Y., Feng, C.-H.: Comment on “Shallow water in an open sea or a wide channel: auto-and non-auto-Bäcklund transformations with solitons for a generalized (2+ 1)-dimensional dispersive long-wave system. Chaos Solitons Fractals 151, 111222 (2021a)
Gao, X.-Y., Guo, Y.-J., Shan, W.-R.: Optical waves/modes in a multicomponent inhomogeneous optical fiber via a three-coupled variable-coefficient nonlinear Schrödinger system. Appl. Math. Lett. 120, 107161 (2021b)
Gao, X.-Y., Guo, Y.-J., Shan, W.-R.: Cosmic dusty plasmas via a (3+1)-dimensional generalized variable-coefficient Kadomtsev–Petviashvili–Burgers-type equation: auto-Bäcklund transformations, solitons and similarity reductions plus observational/experimental supports. Waves Random Complex Media (2021). https://doi.org/10.1080/17455030.2021.1942308
Gao, X.-Y., Guo, Y.-J., Shan, W.-R.: Beholding the shallow water waves near an ocean beach or in a lake via a Boussinesq–Burgers system. Chaos Solitons Fract. 147, 110875 (2021)
Gao, X., Guo, Y.-J., Shan, W.: Scaling transformations, hetero-backlund transformations and similarity reductions on a (2+1)-dimensional generalized variable-coefficient Boiti-Leon-Pempinelli system for water waves. Roman. Rep. Phys. 73, 111 (2021)
Ghanbari, B., Gómez-Aguilar, J.F.: The generalized exponential rational function method for Radhakrishnan–Kundu–Lakshmanan equation with Beta time derivative. Revista Mexicana de Física 65, 503–518 (2019)
Guo, J.-L., Yang, Z.-J., Song, L.-M., Pang, Z.-G.: Propagation dynamics of tripole breathers in nonlocal nonlinear media. Nonlinear Dyn. 101, 1147–1157 (2020)
Hafez, M.G., Iqbal, S.A., Akther, S., Uddin, M.F.: Oblique plane waves with bifurcation behaviors and chaotic motion for resonant nonlinear Schrodinger equations having fractional temporal evolution. Results Phys. 15, 102778 (2019)
He, J.-H.: Variational principle and periodic solution of the Kundu–Mukherjee–Naskar equation. Results Phys. 17, 103031 (2020)
Hosseini, K., Bekir, A., Ansari, R.: Exact solutions of nonlinear conformable time-fractional Boussinesq equations using the \(\exp (-\phi (\eta ))\) expansion method. Opt. Quantum Electron. 49(4), 131 (2017)
Hosseini, K., Mirzazadeh, M., Ilie, M., Gómez-Aguilar, J.F.: Biswas–Arshed equation with the beta time derivative: optical solitons and other solutions. Optik 217, 164801 (2020)
Iqbal, S.A., Golam-Hafez, Md., Uddin, M.F.: Bifurcation features, chaos, and coherent structures for one-dimensional nonlinear electrical transmission line. Comput. Appl. Math. 41, 1–50 (2022)
Islam, Md.E., Akbar, M.A.: Stable wave solutions to the Landau–Ginzburg–Higgs equation and the modified equal width wave equation using the IBSEF method. Arab J. Basic Appl. Sci. 27(1), 270–278 (2020)
Khatun, M.A., Arefin, M.A., Asif, M., Islam, M.Z., Akbar, M.A., Uddin, M.H.: New dynamical soliton propagation of fractional type couple modified equal-width and Boussinesq equations. Alex. Eng. J. 61(12), 9949–9963 (2022)
Khatun, M.A., Arefin, M.A., Islam, M.Z., Akbar, M.A., Uddin, M.H., İnç, M.: investigation of adequate closed form travelling wave solution to the space–time fractional non-linear evolution equations. J. Ocean Eng. Sci. 7(3), 292–303 (2022)
Kudryashov, N.A.: Method for finding highly dispersive optical solitons of nonlinear differential equation. Optik 206, 163550 (2020)
Li, X.-L., Guo, R.: Interactions of localized wave structures on periodic backgrounds for the coupled Lakshmanan–Porsezian–Daniel equations in birefringent optical fibers. Annalen der Physik 535(1), 2200472 (2023)
Li, J., Yang, Z.-J., Zhang, S.-M.: Periodic collision theory of multiple cosine-Hermite–Gaussian solitons in Schrödinger equation with nonlocal nonlinearity. Appl. Math. Lett. 140, 108588 (2023)
Lu, D., Seadawy, A.R., Ali, A.: Dispersive traveling wave solutions of the equal-width and modified equal-width equations via mathematical methods and its applications. Results Phys. 9, 313–320 (2018)
Malfliet, M.: Solitary wave solutions of nonlinear wave equations. Am. J. Phys. 60(7), 650–654 (1992)
Malomed, B.A., Mihalache, D., Wise, F., Torner, L.: Spatiotemporal optical solitons. J. Opt. B: Quantum Semiclass. Opt. 7(5), R53 (2005)
Raslan, R.K., Ali, K.K., Shallal, M.A.: The modified extended tanh method with the Riccati equation for solving the space–time fractional EW and MEW equations. Chaos Solitons Fractals 103, 404–409 (2017)
Raza, N., Arshed, S., Sial, S.: Optical solitons for coupled Fokas Lenells equation in birefringence fibers. Mod. Phys. Lett. B 33, 1950317 (2019)
Rezazadeh, H., et al.: Hyperbolic rational solutions to a variety of conformable fractional Boussinesq-like equations. Nonlinear Eng. 8(1), 224–230 (2019)
Shen, Y., Tian, B.: Bilinear auto-Bäcklund transformations and soliton solutions of a (3+1)-dimensional generalized nonlinear evolution equation for the shallow water waves. Appl. Math. Lett. 122, 107301 (2021)
Shen, S., Yang, Z., Li, X., Zhang, S.: Periodic propagation of complex-valued hyperbolic-cosine-Gaussian solitons and breathers with complicated light field structure in strongly nonlocal nonlinear media. Commun. Nonlinear Sci. Numer. Simul. 103, 106005 (2021)
Shen, Shuang, Yang, Zhen-Jun., Pang, Zhao-Guang., Ge, Yan-Rong.: The complex-valued astigmatic cosine-Gaussian soliton solution of the nonlocal nonlinear Schrödinger equation and its transmission characteristics. Appl. Math. Lett. 125, 107755 (2022)
Shi, D., Zhang, Y.: Diversity of exact solutions to the conformable space–time fractional MEW equation. Appl. Math. Lett. 99, 105994 (2019)
Song, Li-Min., Yang, Zhen-Jun., Li, Xing-Liang., Zhang, S.-M.: Coherent superposition propagation of Laguerre–Gaussian and Hermite–Gaussian solitons. Appl. Math. Lett. 102, 106114 (2020)
Uddin, M.F., Hafez, M.G.: Interaction of complex short wave envelope and real long wave described by the coupled Schrödinger–Boussinesq equation with variable coefficients and beta space fractional evolution. Results Phys. 19, 103268 (2020)
Uddin, M.F., Hafez, M.G., Hammouch, Z., Rezazadeh, H., Baleanu, D.: Traveling wave with beta derivative spatial–temporal evolution for describing the nonlinear directional couplers with metamaterials via two distinct methods. Alex. Eng. J. 60(1), 1055–1065 (2021)
Uddin, M.F., Hafez, M.G., Hammouch, Z., Baleanu, D.: Periodic and rogue waves for Heisenberg models of ferromagnetic spin chains with fractional beta derivative evolution and obliqueness. Waves Random Complex Media 31(6), 2135–2149 (2021)
Uddin, M.F., Hafez, M.G., et al.: Optical wave phenomena in birefringent fibers described by space–time fractional cubic–quartic nonlinear Schrödinger equation with the sense of beta and conformable derivative. Adv. Math. Phys. (2022a). https://doi.org/10.1155/2022/7265164
Uddin, M.F., Hafez, M.G., Hwang, I., Park, C.: Effect of space fractional parameter on nonlinear ion acoustic shock wave excitation in an unmagnetized relativistic plasma. Front. Phys. 9, 766 (2022b)
Uddin, M.F., Hafez, M.G., Iqbal, S.A.: Dynamical plane wave solutions for the Heisenberg model of ferromagnetic spin chains with beta derivative evolution and obliqueness. Heliyon 8, 3 (2022c)
Volkan, A.L.A.: Exact solutions of nonlinear time fractional Schrödinger equation with beta-derivative. Fundam. Contemp. Math. Sci. 4(1), 1–8 (2023)
Wang, M., Tian, B., Hu, C.-C., Liu, S.-H.: Generalized Darboux transformation, solitonic interactions and bound states for a coupled fourth-order nonlinear Schrödinger system in a birefringent optical fiber. Appl. Math. Lett. 119, 106936 (2021)
Yang, Z.-J., Zhang, S.-M., Li, X.-L., Pang, Z.-G., Bu, H.-X.: High-order revivable complex-valued hyperbolic-sine-Gaussian solitons and breathers in nonlinear media with a spatial nonlocality. Nonlinear Dyn. 94, 2563–2573 (2018)
Yang, D.-Y., Tian, B., Qu, Q.-X., Zhang, C.-R., Chen, S.-S., Wei, C.-C.: Lax pair, conservation laws, Darboux transformation and localized waves of a variable-coefficient coupled Hirota system in an inhomogeneous optical fiber. Chaos Solitons Fract. 150, 110487 (2021)
Yépez-Martínez, H., Gómez-Aguilar, J.F., Baleanu, D.: Beta-derivative and sub-equation method applied to the optical solitons in medium with parabolic law nonlinearity and higher order dispersion. Optik 155, 357–365 (2018)
Yusuf, A., Inc, M., Aliyu, A.I., Baleanu, D.: Optical solitons possessing beta derivative of the Chen–Lee–Liu equation in optical fibers. Front. Phys. 7, 34 (2019)
Zafar, A.: The \(exp_a\) function method and the conformable time-fractional KdV equations. Nonlinear Eng. 8, 728–732 (2019)
Zafar, A., Raheel, M., Bekir, A.: Expolring the dark and singular soliton solutions of Biswas–Arshed model with full nonlinear form. Optik 204, 164133 (2020)
Zaman, U.H.M., Arefin, M.A., Akbar, M.A., Uddin, M.H.: Study of the soliton propagation of the fractional nonlinear type evolution equation through a novel technique. Plos ONE 18(5), e0285178 (2023a)
Zaman, U.H.M., Arefin, M.A., Akbar, M.A., Uddin, M.H.: Stable and effective traveling wave solutions to the non-linear fractional Gardner and Zakharov–Kuznetsov–Benjamin–Bona–Mahony equations. Partial Differ. Equ. Appl. Math. 7, 100509 (2023b)
Zaman, U.H.M., Arefin, M.A., Akbar, M.A., Uddin, M.H.: Utilizing the extended tanh-function technique to scrutinize fractional order nonlinear partial differential equations. Partial Differ. Equ. Appl. Math. 8, 100563 (2023c)
Zaman, U.H.M., Arefin, M.A., Akbar, M.A., Uddin, M.H.: Solitary wave solution to the space–time fractional modified Equal Width equation in plasma and optical fiber systems. Results Phys. 52, 106903 (2023d)
Zayed, E.M.E., Al-Nowehy, A.G.: Generalized Kudryashov method and general \(exp_a\) function method for solving a high order nonlinear Schrödinger equation. J. Space Explor. 6, 1–26 (2017)
Zhang, R.-F., Bilige, S.: Bilinear neural network method to obtain the exact analytical solutions of nonlinear partial differential equations and its application to p-gBKP equation. Nonlinear Dyn. 95, 3041–3048 (2019)
Zhang, R.-F., Li, M.-C.: Bilinear residual network method for solving the exactly explicit solutions of nonlinear evolution equations. Nonlinear Dyn. 108(1), 521–531 (2022)
Zhang, R.-F., Bilige, S., Liu, J.-G., Li, M.: Bright–dark solitons and interaction phenomenon for p-gBKP equation by using bilinear neural network method. Physica Scripta 96(2), 025224 (2020)
Zhang, R.-F., Li, M.-C., Yin, H.-M.: Rogue wave solutions and the bright and dark solitons of the (3+ 1)-dimensional Jimbo–Miwa equation. Nonlinear Dyn. 103, 1071–1079 (2021)
Zhang, R., Bilige, S., Chaolu, T.: Fractal solitons, arbitrary function solutions, exact periodic wave and breathers for a nonlinear partial differential equation by using bilinear neural network method. J. Syst. Sci. Complex. 34, 122–139 (2021a)
Zhang, R.-F., Li, M.-C., Albishari, M., Zheng, F.-C., Lan, Z.-Z.: Generalized lump solutions, classical lump solutions and rogue waves of the (2+ 1)-dimensional Caudrey–Dodd–Gibbon–Kotera–Sawada-like equation. Appl. Math. Comput. 403, 126201 (2021b)
Zhang, R.-F., Li, M.-C., Gan, J.-Y., Li, Q., Lan, Z.-Z.: Novel trial functions and rogue waves of generalized breaking soliton equation via bilinear neural network method. Chaos Solitons Fractals 154, 111692 (2022)
Zhang, R.-F., Li, M.-C., Cherraf, A., Vadyala, S.R.: The interference wave and the bright and dark soliton for two integro-differential equation by using BNNM. Nonlinear Dyn. 111(9), 8637–8646 (2023)
Zou, Z., Guo, R.: The Riemann–Hilbert approach for the higher-order Gerdjikov–Ivanov equation, soliton interactions and position shift. Commun. Nonlinear Sci. Numer. Simul. 124, 107316 (2023)
Acknowledgements
This research was supported by the Researchers Supporting Project Number (RSP2024R440), King Saud University, Riyadh, Saudi Arabia.
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK). No funding received for this paper.
Author information
Authors and Affiliations
Contributions
AZ, MR, MJ, FMT, FT: developed the theory and performed the computations. IS, MB, MI: verified the analytical methods and supervised the findings of this work.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zafar, A., Raheel, M., Jamal, M. et al. Analytic wave solutions to the beta-time fractional modified equal width equation based on two efficient approaches. Opt Quant Electron 56, 1288 (2024). https://doi.org/10.1007/s11082-024-07165-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-024-07165-1