
Abstract
The influence of internal and external nonlinear damping forms on the dynamics of a generalized Beck’s column, namely a visco-elastic cantilever beam, subjected to conservative and non-conservative loads at its free end, is investigated. A variational principle provides the equations of motion of the system, which are properly recast into an integro-differential form. The linear stability analysis of the system is then carried out and bifurcation points are detected in the space of parameters associated with the conservative and non-conservative loads. Starting from Hopf’s bifurcation points, a post-critical analysis, based on the Method of Multiple Scales is directly performed on the continuous system, avoiding any a-priori discretization. This method provides the bifurcation equations whose analysis reveals the double nature of nonlinear damping, which can be beneficial or detrimental in terms of stable or unstable bifurcated equilibria. It is found that both the internal and external forms of nonlinear damping can turn a supercritical instability of the system into a subcritical one, thus revealing another destabilizing effect of damping, beyond the very well-known one occurring in the linear field. Numerical simulations, grounded on a Galerkin discretization of the original system, confirm the analytical findings.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Stability of structures under conservative and non-conservative loads is a classical problem [1,2,3], with interesting aspects from theoretical and practical perspectives. Examples include jet or rocked propelled aerospace vehicles [4,5,6,7], elastic systems in presence of dry friction [8,9,10], piezoelectric beams [11,12,13,14], as well as fluid conveying pipes and other structures that interact with a fluid flow [15,16,17]. In many cases, damping is of the external type, e.g., it is associated with the interaction of the system with an external fluid [18]. However, damping can also manifest itself as an internal cause, due to material dissipation, as, e.g., that ruled by the rheological Kelvin-Voigt damping model [19,20,21,22]. The effects of damping on the stability of non-conservative systems, as, for example, those loaded by non-conservative forces of positional type, such as follower forces [9, 23, 24], are sometime unexpected by intuition. In this framework, the well-known damping destabilization paradox or, said in other words, the destabilizing effect of internal damping [20, 21, 25] manifests itself through the finite reduction of the critical load of circulatory systems (i.e., undamped systems loaded by non-conservative positional forces) when they are perturbed by small damping [26]. A paradigmatic discrete system exhibiting this phenomenon is the Ziegler’s double pendulum [2, 21, 27, 28], while a continuous one is the Beck’s column, i.e., an unshearable, inextensible visco-elastic cantilever beam loaded by a follower force at the free end [1, 27, 29,30,31].
Systems such as those mentioned above have been widely studied in the literature, in both linear and nonlinear fields [30,31,32,33,34,35,36,37,38,39]. In particular, in [32] the nonlinear response of a cantilever planar beam in the presence of lateral excitations and support motion is addressed, while the nonlinear flexural-flexural oscillations of the beam under lateral excitations are studied in [33]. Flutter and divergence instabilities of vertical columns subjected to follower actions (like those produced by a jet engine) are investigated in [40, 41]. Follower actions can also be generated by dry friction, as is discussed in [9, 42, 43], where the results of theoretical and experimental investigations concerning the loss of stability of slender elastic elements induced by dry friction is addressed. The stability of a double pendulum subjected to follower and dead forces, with specific attention to chaotic motions, is addressed in [39]. In [34,35,36] the critical and post-critical bifurcation scenarios of a Beck’s column are investigated via the Method of Multiple Scales, revealing divergence, Hopf’s, and double-zero bifurcations. In [30] the complex bifurcation scenarios, taking place in a Beck’s column under the combination of conservative and non-conservative loads is discussed. In [31] the nonlinear dynamics close to a Hopf’s bifurcation is investigated, and the so-called Hard Loss of Stability of a Ziegler’s double pendulum and of a Beck’s column, in the presence of a Van-der-Pole-like internal damping (see also [44]) is detected. The nonlinear behavior of both systems has been found to be qualitative the same and the Hard Loss of stability has also been studied analytically for the first system. The simultaneous presence of internal and external damping forms, although of the linear type only, has been considered in [30, 37, 38] among the others. In [13, 14, 45, 46] the use of distributed piezoelectric devices is also explored with the aim to improve the stability of a Beck’s column subjected to linear damping actions of the internal and external types.
The aforementioned works have addressed several aspects of the linear and nonlinear dynamics of discrete and continuous systems, including bifurcation phenomena. However, a targeted investigation on the nonlinear dynamic behavior of continuous one-dimensional systems under the action of conservative and non-conservative loads, and in the presence of combined and complex damping forms as due to material behavior (internal damping) and to fluid–structure interactions (external damping), seems to be missing in the current literature on the subject.
The present paper is framed in the above-mentioned scenario and aims to shed the light on the role played by different (internal and external) nonlinear damping forms on the complex dynamics of nonlinear systems subjected to conservative and non-conservative loads. The paradigmatic system, here considered to perform this investigation, is a generalized Beck’s column made of a nonlinear visco-elastic material, and subjected to nonlinear dissipative loads distributed along its length, plus conservative and non-conservative forces applied at its free end. A variational principle provides the equations of motion of the system, which are properly recast into an integro-differential form. The linear stability analysis of the system is then carried out and bifurcation points are detected in the space of parameters associated with the loads applied at the free end. Starting from Hopf’s bifurcation points, a post-critical analysis, based on the Method of Multiple Scales [30, 47,48,49], is directly performed on the continuous system to analytically study the combined influence of the internal and external nonlinear damping forms. One of the main findings is that both forms of nonlinear damping can turn a supercritical instability of the system into a subcritical one, thus revealing another destabilizing effect of damping, occurring in the nonlinear field, beyond the very well-known one, already mentioned in the foregoing. Comparisons with the results of a numerical approach, grounded on a Galerkin discretization of the original system, are also illustrated and confirm the analytical findings of the present study.

Generalized Beck’s column made of a nonlinear visco-elastic material and embedded in a nonlinear transverse dissipative field
The paper is organized as follows. The mechanical model is introduced in Sect. 2. The linear stability analysis of the system is recalled in Sect. 3, while in Sect. 4 the Multiple Scales Method (MSM) is applied and the relevant bifurcation equations obtained and discussed. Numerical examples are developed in Sect. 5, to check the analytical findings. Finally, conclusions are drawn and possible prospects are illustrated in Sect. 6.
2 Mechanical model
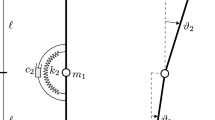
Let us consider the planar structure represented in Fig. 1. It will be referred to as the generalized visco-elastic Beck’s column (see, e.g., [1, 12, 19, 30]), namely, an unshearable, inextensible and visco-elastic cantilever beam, of length l, mass per unit length m, and bending stiffness EI, where E is the elastic modulus and I is the cross-section moment of inertia. It is subject to the combination of a dead (conservative) force, P, and a follower (non-conservative) force, F, applied at its free end (point B in the beam reference configuration). The variable \(s\in [0,l]\) is taken as a material abscissa, spanning the points of the beam axis-line, and \(t\in [0,+\infty )\) is the time.
The beam is made of a nonlinear visco-elastic material, belonging to a class of rheological models including Kelvin-Voigt-, Van der Pol- and Rayleigh-type constitutive laws; this dissipation is referred to as nonlinear internal damping (since it is due to material properties of the system) and is modelled by the function D(s, t). Moreover, nonlinear interactions of the beam with the external environment are assumed to be exerted by a distribution of transverse nonlinear dashpots, located along the whole beam length, whose external dissipative effect is denoted by the function b(s, t). The system reduces to the classical Beck’s column [1] when the dead force, P, the nonlinear external damping, b, and the nonlinear internal damping, D, vanish.
The beam model is formulated as a one-dimensional polar continuum, made of a deformable axis-line and of rigid cross-sections which are normal to the straight axis-line in the reference configuration [50]. The beam lies in the plane of normal \(\bar{\textbf{a}}_{z}\) spanned by the unit-vectors \(\bar{\textbf{a}}_{x},\bar{\textbf{a}}_{y}\). The rotation \(\theta (s,t)\), about \(\bar{\textbf{a}}_{z}\), undergone by the material point \(\text {P}\) at the abscissa s and time t, transforms the local reference basis \(\bar{\mathcal {B}}\mathrel {\mathop {:}}=(\bar{\textbf{a}}_{x},\bar{\textbf{a}}_{y},\bar{\textbf{a}}_{z})\) attached to \(\text {P}^*\) into the local current basis \({\mathcal {B}}\mathrel {\mathop {:}}=({\textbf{a}}_{x}(s,t),{\textbf{a}}_{y}(s,t),{\textbf{a}}_{z}(s,t))\). Since the beam is unshearable, \({\textbf{a}}_{x}(s,t)\) is tangent to the axis-line. By enforcing the internal constraints of inextensibility and unshearability, the only strain measure is the beam curvature, which is defined as follows:
where the prime denotes differentiation with respect to s. Moreover, the following kinematics relations hold:
where u(s, t) and v(s, t) are scalar fields describing the longitudinal and transverse displacements of the beam axis, respectively, which, together with \(\theta (s,t)\), must vanish at \(s=0\) (geometric boundary conditions), i.e.,
Here the deflection v(s, t) is taken as the kinematic descriptor (accordingly, the formulation is referred to as the v-formulation). To this end u(s, t) and \(\theta (s,t)\) are written as functions of v(s, t). From Eq. (2)-a, it is
which, substituted in Eq. (2)-b, after space integration, furnishes
where use is made of Eq. (3)-a.
The equations of motion of the generalized Beck’s column in Fig. 1 are derived by using the extended Hamilton’s principle, according to which the following variational condition has to be satisfied
for any kinematically admissible motion of the system, where \(\delta \mathcal {H}\) denotes the first variation of the action functional and is defined in “Appendix A”.
Following the procedure reported in “Appendix A”, a single integro-differential equation in the unknown function v(s, t) is obtained, namely:
with natural boundary conditions
In (7)–(8), the overdot denotes differentiation with respect to time t, M(s, t) is the internal bending moment at the cross-section s at the time t, p(s, t) is the vertical external load distributed along the beam length (in the problem at hand, it coincides with the distributed dissipative external actions), and, finally, H(l, t) represents the horizontal component of the total tip force in the actual configuration of the beam, i.e., \(H(l,t) = -P -F \cos (\theta (l,t))\).
The constitutive law for the bending moment is assumed to be ruled by the linear visco-elastic Kelvin-Voigt model, coupled with a nonlinear hysteretic dashpot, which is ruled by a Van-der-Pol- and Rayleigh-like law; it reads:
where the nonlinear internal damping function D(s, t) is defined by
with \(d_0\), \(d_1\), and \(d_2\) prescribed material constants.
The distributed external load p(s, t) is expressed in the form
where the nonlinear external damping function b(s, t) is given by
with \(b_0\), \(b_1\), and \(b_2\) prescribed constants that describe the constitutive behavior of the external medium that interacts with the beam.
In the following, the dependence of functions, e.g., v(s, t), on the independent variables s and t is understood and, hence, omitted. Moreover, the non-dimensional variables \({\tilde{t}} = \omega \, t\), \({\tilde{s}} = s/l\), and \({\tilde{v}} = v/l\) are introduced to recast the problem into a non-dimensional form, with \(\omega = \sqrt{m l^4 / EI}\).
By using (2) to express u and \(\theta \) in terms of v and expanding in Taylor’s series all equations up to cubic terms, the non-dimensional equation of motion and boundary conditions turn out to be (omitting the tilde)
where subscripts A, B denote evaluation of functions at the abscissa of the relevant points of Fig. 1, while functions f, g, h are defined in “Appendix B”, along with the dimensionaless parameters associated with internal damping (\(\alpha _0\), \(\alpha _1\), \(\alpha _2\)), external damping (\(\beta _0\), \(\beta _1\), \(\beta _2\)), and tip loads (\(\mu \), \(\nu \)).
3 Linear stability analysis
To study the system dynamics it is first necessary to perform a linear stability analysis and identify eventual bifurcation points. This is followed by a bifurcation analysis to investigate the behavior of the nonlinear system close to a bifurcation point, i.e., in the so-called post-critical regime. The aim is to give an answer to the following questions: does the system tend to limit-cycles? is the post-critical behavior stable or not? what is the influence of nonlinear damping on the behavior of the system close to a bifurcation point? To answer to these questions an analytical approach, grounded on the Multiple Scales Method, is pursued in Sect. 4.1, while the linear stability and bifurcation analysis that precedes it is addressed hereafter.
A linear stability analysis calls for determining eigenvalues and eigenfunctions of the linear counterpart of problem (13), which reads:
The linear problem (14) is not self-adjoint because of the follower (non-conservative) force associated with the dimensionless load parameter \(\mu \). Moreover, it coincides with a linear problem addressed in [19, 21, 30, 51]; see also [31], where the problem has been formulated in terms of the scalar field \(\theta \), instead of the more common transverse displacement v. In what follows, some well-known results of literature are recalled (see [30] for further details).
Stability of the trivial, rectilinear configuration of the generalized Beck’s column is governed by the linear eigenvalue problem (14). The space boundary value problem is obtained by taking \(v\left( s,t\right) =\phi \left( s\right) e^{\lambda t}\), and by substituting it in Eqs. (14), that becomes:
The field Eq. (15)-a and the boundary conditions at the clamp A, Eqs. (15)-b,c, lead to the solution:
where \(p=p\left( \lambda ,\mu ,\nu ,\alpha _{0},\beta _{0}\right) \) \(\in {\mathbb {C}}\) and \(q=q\left( \lambda ,\mu ,\nu ,\alpha _{0},\beta _{0}\right) \) \(\in {\mathbb {C}}\). By enforcing the remaining boundary conditions at the tip B, an algebraic system is obtained, namely:
where \(\textbf{c}:=\left( C_{1},C_{2}\right) ^{T}\) is a vector of arbitrary (yet interdependent) constants, and \(\textbf{S}_{\lambda }\) is the “dynamic stiffness matrix” of the problem, function of the eigenvalue \(\lambda \), of the load parameters \(\mu \) and \(\nu \), and of the linear damping parameters \(\alpha _{0}\) and \(\beta _{0}\), i.e., \(\textbf{S}_{\lambda }=\textbf{S}_{\lambda }(\lambda ,\mu ,\nu ,\alpha _{0},\beta _{0})\). The characteristic equation,
furnishes the eigenvalue of the system, \(\lambda =\lambda \left( \mu ,\nu ,\alpha _{0},\right. \)\(\left. \beta _{0}\right) \), for a given set of parameters, \(\mu ,\nu ,\alpha _{0},\beta _{0}\), while the solution of the (singular) system (17), for a given eigenvalue \(\lambda \), under a proper normalization condition, provides the associated eigenfunction (16).
A deep study of Eq. (18) has been carried out in [30], where the exact stability diagram for the generalized Beck’s column has been found. A sketch of the linear stability diagram is depicted in Fig. 2-a in the \((\nu ,\mu )\)-plane, for the undamped system, i.e., when \(\alpha _0=\beta _0=0\), and for three damped systems, referred to as (I) \(\alpha _0=0.001\), \(\beta _0=1\), (II) \(\alpha _0=0.01\), \(\beta _0=1\), and (III) \(\alpha _0=0.01\), \(\beta _0=10\). It is important to remark that only the lowest bifurcation branches, among the infinite ones, are shown.

Linear stability diagram of the generalized Beck’s column: a view of the stability chart in the \((\nu ,\mu )\)-plane, for an undamped system (\(\alpha _0=0, \, \beta _0=0\)) and three damped systems (I, II, III); b critical manifolds in the \((\mu ,\alpha _0,\beta _0)\)-parameter space for \(\nu =0\)
It is found in [30] that the stable zone (shaded region in Fig. 2-a) is bounded by a divergence locus, \(\mathcal {D}\), which is a damping-independent curve describing a family of systems having (at least) one zero eigenvalue, and by a Hopf’s locus, which is a damping-dependent curve describing a family of systems having (at least) one complex conjugate eigenvalue pair with zero real part. In this respect, it is important to remark that when the damping is zero a “circulatory” system is obtained, for which all eigenvalues are purely imaginary. In this case, a “circulatory” or “reversible” Hopf’s bifurcation (see, e.g., [19, 21, 30, 52]) takes place at the manifold of the parameter plane \(\mathcal {H}_c\) on which the first two eigenvalues, \(\lambda _j=\pm i\omega _j\) \((j=1,2)\), merge into a double eigenvalue, \(\lambda =\pm i\omega _c\), at a critical Hopf’s load, \(\mu _c=\mu _c(\nu )\). On the contrary, with damping included, the system is “circulatory” and “dissipative”. In this case the Hopf’s bifurcation takes place at the manifold \(\mathcal {H}_d\) of the parameter plane on which a stable complex conjugate eigenvalue pair (having the lowest frequency and negative real part) becomes purely imaginary, i.e., \(\lambda =\pm i\omega _d\) at \(\mu _d=\mu _d(\nu )\) (critical Hopf’s load), entailing the incipient loss of stability of the system. Figure 2-a also shows the intersections between:
-
\(\mathcal {H}_c\) and the \(\mu \)-axis, which is the Beck’s point \(B_c\simeq (0;10.02)\);
-
\(\mathcal {H}_d^{I}\), \(\mathcal {H}_d^{II}\), \(\mathcal {H}_d^{III}\) and the \(\mu \)-axis, referred to here as “visco-elastic Beck’s” points, \(B_{d}^I\simeq (0;9.98)\), \(B_{d}^{II}\simeq (0;8.89)\), \(B_{d}^{III}\simeq (0;12.59)\);
-
\(\mathcal {H}_c\) and \(\mathcal {D}\), which is the double-zero bifurcation point \(DZ_c\simeq (5.51;3.02)\);
-
\(\mathcal {H}_d^{I}\), \(\mathcal {H}_d^{II}\), \(\mathcal {H}_d^{III}\) and \(\mathcal {D}\), i.e., the damped double-zero bifurcation points \(DZ_{d}^I\simeq (5.4;3.06)\), \(DZ_{d}^{II}\simeq (4.3;3.2)\), \(DZ_{d}^{III}\simeq (5.3;3.07)\);
-
\(\mathcal {D}\) and the \(\nu \)-axis, which is the first Eulerian critical load \(E_1=(\pi ^2/8;0)\).
As anticipated before, the Hopf’s loci depend on the linear damping parameters, \(\alpha _0\) and \(\beta _0\). In this respect, some theoretical outcomes from the linear stability analysis, concerning the influence of linear damping on the Hopf’s critical load are well-known in the literature [19, 30]. In particular, small internal damping is known to have a detrimental effect on a circulatory system, while external damping is beneficial. In general, the influence of linear damping on the stability of a generalized Beck’s column can be summarized as follows:
-
for a given \(\beta _{0}\), a small \(\alpha _{0}\) entails \(\mu _{d}(\nu )<\mu _{c}(\nu )\);
-
the larger is \(\beta _{0}\), the lower is the destabilizing effect of \(\alpha _{0}\);
-
for a sufficiently large \(\alpha _{0}\), the destabilizing effect of internal damping vanishes, i.e., \(\mu _{d}(\nu )>\mu _{c}(\nu )\);
-
for a given \(\left( \alpha _{0},\beta _{0}\right) \), the critical load \(\mu _{d}(\nu )\) increases with \(\beta _{0}\), but it can also increase with \(\alpha _{0}\), providing it is sufficiently large.
In this framework, the critical manifold, which bonds the stable region of the system, also known in the literature as the “Whitney’s umbrella” surface [53, 54], is a hyper-surface in the \((\mu ,\nu , \alpha _0, \beta _0)\)-parameter space that can be conveniently represented by sections \(\nu =\mathrm const\). The manifold is represented in Fig. 2-b, when \(\nu =0\), by tackling directly Eq. (18) and by determining the combinations of load and damping parameters at which Hopf’s, divergence and double-zero bifurcations occur.
4 Nonlinear analysis
Following the lines of [30, 31], and focusing our attention on a class of damped systems (i.e., given the linear damping parameters), a post-critical analysis from a Hopf’s bifurcation point is carried out by using the Multiple Scales Method. This is applied in the so-called direct form, namely, directly on the integro-partial differential equations of motion and boundary conditions, thus avoiding any a-priori discretization of such equations. See, e.g., [55, 56].
The aim is to obtain an analytical asymptotic approximation of the system behavior, able to shed the light on the qualitative and quantitative influence of nonlinear damping of the internal and external type or, said in other words, the effect of the nonlinear damping parameters, \(\alpha _1\), \(\alpha _2\), \(\beta _1\), \(\beta _2\), on the nonlinear dynamics of the system and, in particular, on the presence of limit-cycles, their amplitude and stability.
It is worth to notice that, in what follows, a first-order Multiple Scales algorithm is developed, which is able to furnish bifurcation equations that govern the nonlinear dynamics of the (reduced) system close to the Hopf’s bifurcation. If the analysis is pushed up to the second-order, as done in [27] for the Ziegler’s double pendulum, it would permit the derivation of a more complete bifurcation equation and the study of more complex phenomena, such as the so-called Hard Loss of Stability observed for the Ziegler’s double pendulum. Phenomena of this kind are not in the scope of the present work and will be addressed in a subsequent investigation.
4.1 Bifurcation equations
Let us consider a damped system undergoing a Hopf’s bifurcation at the point \(\mu =\mu _d\), \(\nu =\nu _d\) of the load parameters domain, which is taken as the starting point for the asymptotic analysis. The first step of the method used here consists in the rescaling and expansion of the scalar field v(s, t), i.e., \(v \rightarrow \varepsilon ^{1/2} (v_0 + \varepsilon v_1 + \varepsilon ^2 v_2 +...)\), where \(0<\varepsilon \ll 1\) is a small bookkeeping parameter (to be reabsorbed at the end of the procedure). The load parameters are recast in the form \(\mu = \mu _d +\varepsilon \delta \mu \), \(\nu = \nu _d + \varepsilon \delta \nu \), where \(\delta \mu \) and \(\delta \nu \) represent small load increments measured from the bifurcation point. Subsequently, independent time scales are introduced, namely, \(t_k = \varepsilon ^k \, t\), \(k=0,1,...\), such that the total time derivative is expressed in the form \(\textrm{d}/\textrm{d}t = \textrm{d}_0 + \varepsilon \, \textrm{d}_1 + \varepsilon ^2 \, \textrm{d}_2 +...\), and \(\textrm{d}^2/\textrm{d}t^2 = \textrm{d}_0^2 + 2 \varepsilon \, \textrm{d}_0 \textrm{d}_1 + \varepsilon ^2 \, (\textrm{d}_1^2 + 2 \textrm{d}_0 \textrm{d}_2) +...\), where \(\textrm{d}_k\) stands for differentiation with respect to \(t_k\). Finally, perturbation equations are obtained by substitution in Eqs. (13) and collection of terms with the same power of \(\varepsilon \).
The perturbation equations of order \(\varepsilon ^0\) and \(\varepsilon ^1\) read:
where functions \({\tilde{f}}_0\), \({\tilde{g}}_0\) and \({\tilde{h}}_0\), which collect cubic terms, are defined as:
with \({\tilde{g}}_{0B}\) and \({\tilde{h}}_{0B}\) denoting the values of \({\tilde{g}}_0\) and \({\tilde{h}}_0\) calculated at the abscissa of the free end B.
Let us observe that the chain of linear problems (19)–(20) have to be solved consecutively. The solution of the zero order problem (19) can be expressed in the form
where c.c. denotes complex conjugate, \(A(t_1,t_2,...)\) is an unknown (complex) amplitude, and, finally, \(\lambda =\pm i \omega _d\) and \(\phi (s)\) are the right eigenvalue and eigenfunction of the linear problem (15), at the Hopf’s bifurcation point, the latter given by Eq. (16).
By substituting Eq. (24) in the first order perturbation problem (20), this latter reads:
where n.r.t. stands for non-resonant terms, functions \(F_0\), \(G_0\), and \(H_0\) are
functions \(f_0\), \(g_0\), and \(h_0\) are given by
the overbar denotes complex conjugation and, finally, the dimensionless parameters \(\alpha _e\) and \(\beta _e\) are defined as follows:
Parameters \(\alpha _e\) and \(\beta _e\) account for the influence of nonlinear damping on the post-critical behavior of the system. They are referred here to as equivalent nonlinear damping of the internal and external type, respectively.
Note that problem (20) is not homogenous in the unknown function \(v_1\). In order for it to be solvable, a compatibility (or solvability) condition [57] has to be satisfied. For the problem at hand, it reads:
where \(\psi (s)\) is the eigenfunction of the adjoint problem of (14).
By enforcing (33), using the normalization condition \(\int _{0}^{1} \phi {\bar{\psi }} \, \textrm{d}s = 1\) for the eigenfunctions of the linear problem (14), reabsorbing the bookkeeping parameter \(\varepsilon \), and coming back to the true time, it is:
where the c-coefficients are defined in “Appendix C”.
Equation (34) is the complex bifurcation equation obtained by enforcing the solvability of the first order perturbation problem (25). It is a first-order ordinary differential equation (coherently with the co-dimension of the simple Hopf’s bifurcation), governs the dynamics of a reduced order model of the beam close to the Hopf’s bifurcation point, and explicitly accounts for the influence of nonlinear damping on the system dynamics via coefficient \(c_3 = c_{30} + c_{3 \alpha } \alpha _e + c_{3 \beta } \beta _e\).
Equation (34) can be recast in a real form by introducing the real amplitude a(t) and real phase \(\varphi (t)\), such that \(2 A(t)= a(t) e^{i \varphi (t)}\). By substitution, we get:
where the \(\rho \)-coefficients are defined in “Appendix C”.
Steady solutions of the nonlinear ordinary differential system (35), i.e., solutions in the form \(a(t) = a_s\), \(\varphi (t) = \Psi \, t + \varphi _0\), correspond to periodic motions of the original system, with \(a_s\), \(\Psi \), \(\varphi _0\) constant parameters, representing the limit-cycle amplitude, the frequency correction, and the initial phase, respectively. Apart from the null trivial solution, steady solutions of (35) are given by:
Characteristics of limit-cycles described by Eqs. (35)–(36) depend on the linear damping (\(\alpha _0\), \(\beta _0\)), via the \(\rho \)-coefficients, and on the nonlinear damping (\(\alpha _1\), \(\alpha _2\), \(\beta _1\), \(\beta _2\)), via the equivalent nonlinear damping parameters \(\alpha _e\) and \(\beta _e\). The influence of these latter on the dynamics of the system is discussed in Sect. 4.2, on the ground of the analytical results derived here.
4.2 Qualitative analysis
Without loss of generality, let us consider the case of a Hopf’s bifurcation point in the load parameters domain (\(\mu _d\), \(\nu _d\)) that is crossed along the direction of the \(\mu \)-axis (\(\delta \nu =0\), \(\delta \mu >0\)). The limit-cycle amplitude \(a_s\) predictable via the real form of the bifurcation Eq. (34) is given by:
where \(\rho ^a_{0e} = \rho ^a_0 + \rho ^a_{\alpha } \alpha _e + \rho ^a_{\beta } \beta _e\). In this case, the condition for a stable super-critical limit-cycle requires that \(\rho ^a_{\mu } / \rho ^a_{0e} <0\).
In order to discuss the beneficial or detrimental influence of the nonlinear damping on the stability of the considered system, it is observed that even assuming the equivalent nonlinear damping parameters to be positive (\(\alpha _e>0\), \(\beta _e>0\)), their influence on the stability of the system limit-cycles depends on the sign and magnitude of coefficients \(\rho ^a_{\alpha }\) and \(\rho ^a_{\beta }\). These latter, as well as coefficients \(\rho ^a_{\mu }\) and \(\rho ^a_{0}\), explicitly depend on the linear damping parameters \(\alpha _0\) and \(\beta _0\), via Eqs. (C8)–(C9). Notwithstanding this analytical dependence is not trivial, it is possible to provide a graphical representation of the \(\rho \)-coefficients as functions of \(\alpha _0\) and \(\beta _0\), see Figs. 3 and 4.

Coefficients \(\rho ^a_0\) and \(\rho ^a_{\mu }\) as functions of the linear damping parameters \(\alpha _0\) and \(\beta _0\): a \(\rho ^a_0=\rho ^a_0(\alpha _0,\beta _0)\); b \(\rho ^a_{\mu }=\rho ^a_{\mu }(\alpha _0,\beta _0\))

Coefficients \(\rho ^a_{\alpha }\) and \(\rho ^a_{\beta }\) as functions of the linear damping parameters \(\alpha _0\) and \(\beta _0\): a \(\rho ^a_{\alpha }=\rho ^a_{\alpha }(\alpha _0,\beta _0)\); b \(\rho ^a_{\beta }=\rho ^a_{\beta }(\alpha _0,\beta _0\)); c regions of negativeness of coefficients \(\rho ^a_{\alpha }\) and \(\rho ^a_{\beta }\) in the \((\alpha _0,\beta _0)\)-plane, with indication of the three points (blue circle, red square, yellow diamond) associated with the linear damping parameters (\(\alpha _0\) and \(\beta _0\)) of the three damped systems (I, II, III) of Fig. 2-a
Considering the linear damping domain (\(\alpha _0\), \(\beta _0\)) \(\in (0,0.1)\times (0,10)\), we observe that \(\rho ^a_{0}\) is always positive, while \(\rho ^a_{\mu }\) is always negative (Fig. 3). On the contrary, the sign of \(\rho ^a_{\alpha }\) and \(\rho ^a_{\beta }\) can change (Fig. 4), and, accordingly, it is possible to identify three kind of regions in the linear damping domain: in the first region (which contains the circle-marked point) both coefficients are negative; in the second region (which contains the square-marked point) \(\rho ^a_{\alpha }<0\) and \(\rho ^a_{\beta }>0\); finally, in the third region (which contains the diamond-marked point) both coefficients are positive. Such regions are characterized by different (detrimental or beneficial) effects of the internal and external nonlinear dampings on the system dynamics, as is summarized hereafter.
The following general conclusions can be drawn:
-
if the nonlinear damping is absent (\(\alpha _e=\beta _e=0\)), a stable super-critical limit-cycle occurs when the critical Hopf’s load is overcome (as already observed in [31]), being \(\rho ^a_{0e} \equiv \rho ^a_{0}>0\) and \(\rho ^a_{\mu }<0\) (Fig. 3);
-
if the nonlinear internal damping is present (\(\alpha _e\ne 0\)), but the nonlinear external damping is not (\(\beta _e=0\)), its effect on the system dynamics is beneficial if the point (\(\alpha _0\),\(\beta _0\)) is outside the region of negativeness of \(\rho ^a_{\alpha }\) (i.e., outside the red line in Fig. 4-c), otherwise the effect is detrimental; this result is in accordance with the findings of [31] on the influence of a Van-der-Pol-like internal damping; moreover, nonlinear external damping can mitigate the detrimental effect of internal damping forms of the Van der Pol and Rayleigh types and make the overall nonlinear damping effect beneficial;
-
if the nonlinear external damping is present (\(\beta _e\ne 0\)), but the nonlinear internal damping is not (\(\alpha _e=0\)), its effect on the system dynamics is beneficial if the point (\(\alpha _0\),\(\beta _0\)) is outside the region of negativeness of \(\rho ^a_{\beta }\) (i.e., outside the blue line in Fig. 4-c), otherwise the effect is detrimental and, moreover, adding internal damping forms of the Van der Pol and Rayleigh types would even be worsening;
-
if nonlinear dampings of the internal and external type are both present (\(\alpha _e\ne 0\), \(\beta _e\ne 0\)), their combined influence on the amplitude of the system limit-cycle can be beneficial or detrimental, depending on the balance between the overall nonlinear damping effect on one side and both the elastic and inertial nonlinear effects on the other; in particular, if \(\rho ^a_{\alpha } \alpha _e + \rho ^a_{\beta } \beta _e > 0\), the nonlinear damping effect is beneficial; on the contrary, if \(\rho ^a_{\alpha } \alpha _e + \rho ^a_{\beta } \beta _e < 0\), the nonlinear damping effect is detrimental; finally, the nonlinear damping may even turn a stable limit-cycle (e.g., the limit-cycle of a system with \(\rho ^a_{0}>0\), \(\rho ^a_{\mu }<0\), \(\alpha _e=\beta _e=0\)) into an unstable limit-cycle, if \(\rho ^a_{\alpha } \alpha _e + \rho ^a_{\beta } \beta _e < -\rho ^a_0\).
In general, the influence of nonlinear damping forms of the internal and external types such as those considered in the present study can be either beneficial or detrimental, it depends on the value of the equivalent nonlinear dampings, \(\alpha _e\) and \(\beta _e\), and of their coefficients of influence, \(\rho ^a_{\alpha }\) and \(\rho ^a_{\beta }\). Only when all of them have the same sign the influence of nonlinear damping is expected to be beneficial, regardless of their value. In all other cases, it is necessary to check the positiveness of the linear combination \(\rho ^a_{\alpha } \alpha _e + \rho ^a_{\beta } \beta _e\). For example, assuming the nonlinear damping parameters \(\alpha _e\) and \(\beta _e\) to be positive, the effect of the nonlinear damping on the system dynamics may be detrimental within the region of the linear damping domain of Fig. 4 that contains the square-marked point (case II), it is certainly detrimental within the region of the circle-marked point (case I), and it is beneficial within the region of the diamond-marked point (case III).
5 Numerical results
In this section, results of numerical simulations are reported to corroborate the analytical findings of the present study and to emphasize crucial aspects of the nonlinear dynamics of a generalized Beck’s column in the presence of internal and external nonlinear dampings. Specifically, the results provided by the Multiple Scales Method are compared with those obtained by resorting to a purely numerical method to solve the differential problem (13). Such numerical method is based on a Galerkin discretization of the original continuous system, as is done in other works addressing the dynamics, stability, and post-critical behavior of the visco-elastic Beck’s column (see, e.g., [13, 31]). In particular, after a convergence analysis, the results of a three-modes Galerkin discretization have been selected and reported in this section. Further details about this numerical method are given in “Appendix D”.
Three paradigmatic case studies are discussed, corresponding to damped systems associated with the three marked points in Fig. 4. A summary of the main characteristics of such damped systems and case studies, in terms of linear damping parameters, Hopf’s bifurcation frequencies and critical loads, and \(\rho \)-coefficients, is reported in Table 1. It is worth to notice that, in the considered cases (I, II, III in Table 1), the linear damping produces, with respect to the undamped beam, a (medium/low) destabilizing effect (I/II) and a stabilizing effect (III), respectively.
For the above case studies, Fig. 5 provides a graphical representation, namely, a bifurcation chart, of the type of limit-cycles (super- or sub-critical) to which the damped systems may tend, as a function of the nonlinear damping parameters (\(\alpha _e\), \(\beta _e\)). The blue lines in the three cases in Fig. 5 correspond to the combinations of \(\alpha _e\) and \(\beta _e\) that make \(\rho _{0e}=0\). Such lines separate the domain of the nonlinear damping parameters in two regions: in the white region \(\rho _{0e}>0\) (this is associated with super-critical limit-cycles); in the grey region \(\rho _{0e}<0\) (condition for sub-critical limit-cycles).

Bifurcation chart of the post-critical behavior of the system in the (\(\alpha _e\), \(\beta _e\))-plane, for the three case studies, respectively: a case study I; b case study II; c case study III. Blue lines correspond to the combinations of \(\alpha _e\) and \(\beta _e\) for which \(\rho _{0e}=0\); SUP stands for super-critical, SUB stands for sub-critical
It is worth noting that in the case study I, the blue line in Fig. 5 has negative slope and represents an upper limit to the values of \(\alpha _e\) and \(\beta _e\) that allow the expected limit-cycle of the system to remain super-critical and stable. In other words, positive values of \(\alpha _e\) and \(\beta _e\) cannot be too large, otherwise the system stability may be compromised. This seems to represent a paradoxical effect of the nonlinear damping, but it is not so much surprising as even the linear internal damping may have a detrimental influence on the system dynamics, as is well-known [30]. In the second case study, the blue line in Fig. 5 represents a similar constraint on the values of \(\alpha _e\) and \(\beta _e\) that allow the system limit-cycle to remain super-critical and stable, but its slope is positive. Finally, the blue line associated with the third case study in Fig. 5 has negative slope and lies outside the region of positive values of \(\alpha _e\) and \(\beta _e\): this means, for instance, that in such case any combination of positive nonlinear damping parameters (\(\alpha _1\),\(\alpha _2\),\(\beta _1\),\(\beta _2\)) produces positive values of the equivalent nonlinear damping parameters (\(\alpha _e\), \(\beta _e\)) and is expected to be beneficial and to reduce the amplitude of the super-critical, stable limit-cycle of the system.
Bifurcation charts such as those in Fig. 5 provide indications on the combinations of nonlinear damping parameters that may compromise the system stability. To better clarify this point and provide further explanations, let us study more in detail the three cases denoted with the letters A, B, and C in Fig. 5-b. They correspond to three damped systems, referred to here as II\(_A\), II\(_B\), and II\(_C\), having the same linear damping (\(\alpha _0=0.010\), \(\beta _0=1\)), but different nonlinear damping (\(\alpha _e\), \(\beta _e\)). In particular, moving from A to C in Fig. 5-b, the detrimental effect of nonlinear damping increases.
Figure 6 reports bifurcation diagrams of the damped systems II\(_A\), II\(_B\), and II\(_C\) in the domain \(a_s\)-\(\delta \mu \), where \(a_s\) is the asymptotic amplitude of the system limit-cycle (as per formula (37)) and \(\delta \mu \) is the load parameter increment measured from the bifurcation point. The blue lines (MSM) in Fig. 6 correspond to the bifurcation diagrams obtained via the Method of Multiple time Scale, while the red marks (GAL) are associated with the corresponding diagrams derived via a numerical procedure based on a Galerkin discretization of the original system to solve problem (13).

Bifurcation diagrams reporting the asymptotic amplitude \(a_s\) (as per formula (37)) versus the load parameter increment \(\delta \mu \), for three paradigmatic systems having the same linear dampings (\(\alpha _0=0.010\), \(\beta _0=1\)) and different nonlinear dampings (\(\alpha _e\), \(\beta _e\)): a system without nonlinear damping \(\alpha _e=0\), \(\beta _e=0\) (super-critical); b system with nonlinear damping \(\alpha _e=0.005\), \(\beta _e=0.005\) (super-critical); c system with nonlinear damping \(\alpha _e=0.025\), \(\beta _e=0.005\) (sub-critical)
As is apparent from Fig. 6, the three damped systems, II\(_A\), II\(_B\), II\(_C\), have the following characteristics: the first is (a) a system without nonlinear damping (\(\alpha _e=\beta _e=0\)), whose limit-cycles predicted by both methods (MSM and GAL) are super-critical and stable; the second is (b) a system with nonlinear damping parameters \(\alpha _e=\beta _e=0.005\), whose limit-cycles are still super-critical and stable, notwithstanding the detrimental influence of the considered nonlinear damping; finally, the third is (c) a system with nonlinear damping parameters \(\alpha _e=0.025\) and \(\beta _e=0.005\), whose limit-cycles predicted via the Multiple Scales Method (MSM) would be of the sub-critical unstable type, but the Galerkin-based numerical approach shows the situation is bit more involved than the prediction at the first-order of the Method of Multiple Scales for this system. In particular, the presence of a turning point in the bifurcation diagram of Fig. 6-c is observed, which is not a simple parabola, but at least a higher order polynomial curve. The turning point splits such curve in two parts: the upper part (above the turning point) is associated with stable limit-cycles, while the lower part correspond to limit-cycles that cannot be actually reached by the system. In other words, negative increments of the load parameter \(\delta \mu \) make the asymptotic system motion to vanish (\(a_s=0\)) or make it tend towards values of \(a_s\) belonging to the upper part of the bifurcation curve, depending on the initial conditions of the system.
This kind of behavior is the so-called Hard Loss of Stability Phenomenon, already observed for the Ziegler’s double pendulum in [27] and for the Beck’s column in the presence of a Van-der-Pol-like internal damping in [31]. This phenomenon entails, via a turning point, a regain of stability of the sub-critical branches predicted by the first-order analysis. Therefore, when the load parameter \(\mu \) is increased from the critical value \(\mu _d\), the limit-cycle amplitude suddenly “jumps” to a finite value, that could be unacceptable and dangerous from an engineering point of view. However, to predict analytically phenomena of this kind it is necessary to push the Multiple Scales algorithm one step further, that is, to the second order problem, as done in [27] for the Ziegler’s double pendulum, but this out of the scope of the present work and will be addressed in a subsequent investigation.
This section is concluded by comparing the time histories of the transverse displacement of the beam tip v(1, t) obtained by numerical integration of the bifurcation Eq. (35) and the corresponding time histories derived by resorting to the Galerkin’s approach to solve problem (13). Specifically, Fig. 7 illustrates the time histories of the tip displacement v(1, t) for the three damped systems associated with the case studies I, II, and III in absence of nonlinear damping (\(\alpha _e=0\), \(\beta _e\)=0), when the increment of the load parameter is \(\delta \mu = 0.01 \mu _d\) (\(\delta \nu =0\)). Figure 8 reports the corresponding time histories when the nonlinear damping is present and is associated with nonlinear damping parameters \(\alpha _e=0.005\) and \(\beta _e\)=0.005.

Time histories of the tip displacement v(1, t), via the method of multiple time scales (MSM, blue) and the numerical method based on Galerkin’s appoarch (GAL, grey), for three case studies (I, II, III), when \(\delta \mu = 0.01 \mu _d\) and \(\delta \nu =0\), in absence of nonlinear damping (\(\alpha _e=0\), \(\beta _e\)=0); \(a_s\) is the asymptotic amplitude as per formula (37)

Time histories of the tip displacement v(1, t), via the method of multiple time scales (MSM, blue) and the numerical method based on Galerkin’s appoarch (GAL, grey), for three case studies (I, II, III), when \(\delta \mu = 0.01 \mu _d\) and \(\delta \nu =0\), in presence of nonlinear damping (\(\alpha _e=0.005\), \(\beta _e\)=0.005); \(a_s\) is the asymptotic amplitude as per formula (37)
Figures 7 and 8 show a very good agreement between the numerical solution of problem (13) based on a three-modes Galerkin’s method (reported in grey) and the amplitude of the relevant limit-cycle obtained as solution of the bifurcation Eq. (35) (represented in blue), whose stationary asymptotic value coincides with the prediction of the simple formula (37).
Looking at the results obtained, it is apparent that the numerical results reported and discussed in this section are in good agreement with the predictions based on the analytical findings of the previous section. However, apart from the quantitative accordance between the results of the two approaches observed in the foregoing, from a qualitative standpoint we remark a clear increase of the limit-cycle amplitudes in the cases studies I and II when the internal and external nonlinear dampings are introduced in the system (detrimental effect of nonlinear damping), and a reduction (beneficial effect) in the third case study, as it is expected.
6 Conclusions
The influence of nonlinear damping of the internal and external type on the dynamics of a generalized Beck’s column has been addressed in the paper. A variational principle has been exploited to get the equations of motion and the natural boundary conditions that govern the dynamic behavior of the system. A first-order perturbation analysis, based on the Method of Multiple Scales, has been directly performed on the continuous system, to derive the system bifurcation equations. This asymptotic, analytical approximation of the system behavior close to a Hopf’s bifurcation point has allowed to study analytically the corresponding limit-cycles of the system and to shed the light on the combined effect of the internal and external nonlinear dampings on the stability and post-critical behavior of the system. The main findings can be summarized in what follows.
-
In the absence of nonlinear damping a stable, super-critical limit-cycle manifests itself, thus confirming the results of [31].
-
Both nonlinear internal and external damping forms have a double nature, namely: each of them can be beneficial or detrimental, in terms of reducing or increasing the limit-cycle amplitude.
-
When only nonlinear internal damping of Van der Pol type is present, as in [31], its effect on the limit-cycle amplitude can be beneficial or detrimental, depending on the sign of the related coefficient of influence (which, in turn, is a function of the linear damping parameters) in the bifurcation equation; in this framework, adding internal damping of Rayleigh type does not qualitatively change this behavior, but an external nonlinear damping can mitigate the detrimental effect of the nonlinear internal damping and make the overall nonlinear damping effect beneficial, as it is shown in the paper.
-
When only nonlinear external damping of Van der Pol (or Rayleigh) type is present, it can reduce (beneficial effect) or increase (detrimental effect) the limit-cycle amplitude, thus having, from a qualitative point of view, the same effect of the nonlinear internal damping; moreover, when the effect of the considered nonlinear external damping is detrimental, adding internal damping forms of the Van der Pol and Rayleigh types would not be helpful.
-
Super-critical (stable) as well as sub-critical (unstable) limit-cycles can manifest themselves depending on the balance between the overall (internal and/or external) nonlinear damping effect on one side, and both the elastic and inertial nonlinear contributions on the other, thus extending the results of [31] also in the presence of internal nonlinear damping of Rayleigh type and of external nonlinear dampings of Rayleigh and Van der Pol types.
-
The presence of the so-called Hard Loss of Stability phenomenon, already observed for the Ziegler’s double pendulum in [27] and for the Beck’s column in the presence of a Van-der-Pol-like internal damping in [31] is confirmed in this work. This phenomenon entails that a periodic sub-critical branch turns back, regaining stability and, consequently, as soon as the critical load is overcome, a large amplitude limit-cycle manifests itself, not going to zero at the critical load.
-
The interaction between nonlinear internal and external damping forms has been detected, primarily by showing that the linear damping parameter plane can be divided into different regions in which just one (or both) of the nonlinear damping forms could entail a beneficial effect on the system limit-cycle amplitude. Moreover, bifurcation charts have been built-up, revealing the existence of two regions in the plane of the nonlinear damping coefficients, in which super- or sub-critical limit-cycles take place. In the sub-critical regions, due to the Hard Loss of stability phenomenon, a regain of stability has been numerically detected.
The analytical results derived in the paper have been validated by comparisons with benchmark solutions obtained by resorting to a numerical method based on a Galerkin discretization of the original system. To this end, three damped beams, for which linear damping produces (I) a medium destabilizing effect, (II) a low destabilizing effect, and (III) a stabilizing effect, respectively, have been considered. The numerical analysis has confirmed that both the internal and external nonlinear damping forms can be beneficial or detrimental, as we can predict a-priori on the ground of the analytical results derived and discussed in the paper.
Several aspects deserve further investigation and will be addressed in future woks, e.g.: i) the analytical study of the dynamic behavior of the system close to double-zero bifurcation points, as is done in [30] for a nonlinear visco-elastic beam in presence of linear damping; ii) the extension of the analysis of the present study to the second order problem of the Method of Multiple Scales, to be also able to detect analytically the Hard Loss of Stability phenomenon and the related turning points in the bifurcation diagrams (as is done in [27] for the Ziegler’s double pendulum); iii) the analytical investigation of the influence of non-uniform cross-sectional properties (associated with variations in the cross-section geometry and material properties, as in [58, 59]) on the nonlinear dynamics of the generalized visco-elastic Beck’s column.
Data availability
The data that support the findings of this study are available from the corresponding author, F.D., upon request.
References
Beck, M.: Die knicklast des einseitig eingespannten, tangential gedrückten stabes. Z. Angew. Math. Phys. 3(3), 225–228 (1952)
Ziegler, H.: Die stabilitätskriterien der elastomechanik. Ingenieur-Archiv 20(1), 49–56 (1952)
Bolotin, V.V.: Nonconservative Problems of the Theory of Elastic Stability. English translation published by Pergamon Press Inc, New York (1963)
Langthjem, M.A., Sugiyama, Y.: Dynamic stability of columns subjected to follower loads: A survey. J. Sound Vib. 238(5), 809–851 (2000)
Ryu, B.R., Katayama, K., Sugiyama, Y.: Dynamic stability of Timoshenko columns subjected to subtangential forces. Comput. Struct. 68, 499–512 (1998)
Fazelzadeh, S.A., Mazidi, A.: Nonlinear aeroelastic analysis of bending-torsion wings subjected to a transverse follower force. J. Comput. Nonlinear Dyn. 6(3), 031016 (2011)
Datta, P.K., Biswas, S.: Aeroelastic behavior of aerospace structural elements with follower force: a review. Int. J. Aeronaut. Space Sci. 12(2), 134–148 (2011)
Barsotti, R., Bennati, S., Migliaccio, G.: Non-linear dynamics of simple elastic systems undergoing friction-ruled stick-slip motions. CivilEng 5, 420–434 (2024)
Bigoni, D., Noselli, G.: Experimental evidence of flutter and divergence instabilities induced by dry friction. J. Mech. Phys. Solids 59(10), 2208–2226 (2011)
Bennati, S., Barsotti, R., Migliaccio, G.: A simple model for predicting the nonlinear dynamic behavior of elastic systems subjected to friction. In: Carcaterra, A., Paolone, A., Graziani, G. (eds.) Proceedings of XXIV AIMETA Conference 2019, pp. 1415–1425. Springer, Cham (2020)
Fazelzadeh, S.A., Eghtesad, M., Azadi, M.: Buckling and flutter of a column enhanced by piezoelectric layers and lumped mass under a follower force. Int. J. Struct. Stab. Dyn. 10, 1083–1097 (2010)
D’Annibale, F., Rosi, G., Luongo, A.: Piezoelectric control of hopf bifurcations: a non-linear discrete case study. Int. J. Non-Linear Mech. 80, 160–169 (2016)
Casalotti, A., D’Annibale, F.: A rod-like piezoelectric controller for the improvement of the visco-elastic Beck’s beam linear stability. Struct. Control Health Monit. 29, e2865 (2021)
Casalotti, A., D’Annibale, F.: On the effectiveness of a rod-like distributed piezoelectric controller in preventing the Hopf bifurcation of the visco-elastic Beck’s beam. Acta Mech. 233, 1819–1836 (2022)
Wang, L.: Flutter instability of supported piped conveying fluid subjected to distributed follower forces. Acta. Mech. Sin. 25, 46–52 (2012)
Tsiatas, G.C., Katsikadelis, J.T.: Post-critical behavior of damped beam columns with variable cross section subjected to distributed follower forces. Nonlinear Dyn. 56, 429–441 (2008)
Blevins, R.D.: Flow-Induced Vibration. Van Nostrand Reinhold, New York (1990)
Detinko, F.M.: Lumped damping and stability of Beck column with a tip mass. Int. J. Solids Struct. 40(17), 4479–4486 (2003)
Luongo, A., D’Annibale, F.: On the destabilizing effect of damping on discrete and continuous circulatory systems. J. Sound Vib. 133, 6723–6741 (2014)
Seyranian, A.P., Mailybaev, A.A.: Multiparameter Stability Theory with Mechanical Applications, vol. 13. World Scientific, Singapore (2003)
Kirillov, O.: A theory of the destabilization paradox in non-conservative systems. Acta Mech. 174, 145–166 (2005)
Kirillov, O.N.: Non Conservative Stability Problems of Modern Physics. De Gruyter, Berlin, Boston (2013)
Langthjem, M.A., Sugiyama, Y.: Optimum design of cantilevered columns under the combined action of conservative and nonconservative loads, part I: the undamped case. Comput. Struct. 74, 385–398 (2000)
Elishakoff, I.: Controversy associated with the so-called “follower forces’’: critical overview. Appl. Mech. Rev. 58(2), 117–142 (2005)
Luongo, A., Ferretti, M., D’Annibale, F.: Paradoxes in dynamic stability of mechanical systems: investigating the causes and detecting the nonlinear behaviors. Springerplus 5(1), 60 (2016)
Luongo, A., D’Annibale, F.: A paradigmatic minimal system to explain the Ziegler paradox. Continuum Mech. Thermodyn. 27, 211–222 (2015)
Luongo, A., D’Annibale, F., Ferretti, M.: Hard loss of stability of Ziegler’s column with nonlinear damping. Meccanica 51, 2647–2663 (2016)
D’Annibale, F., Ferretti, M.: On the effects of linear damping on the nonlinear Ziegler’s column. Nonlinear Dyn. 103, 3149–3164 (2021)
Kirillov, O.N., Seyranian, A.P.: The effect of small internal and external damping on the stability of distributed non-conservative systems. J. Appl. Math. Mech. 69(4), 529–552 (2005)
Luongo, A., D’Annibale, F.: Double zero bifurcation of non-linear viscoelastic beams under conservative and non-conservative loads. Int. J. Non-Linear Mech. 55, 128–139 (2013)
Luongo, A., D’Annibale, F.: Nonlinear hysteretic damping effects on the post-critical behaviour of the visco-elastic Beck’s beam. Math. Mech. Solids 22(6), 1347–1365 (2017)
Silva, M.R.M.: Harmonic non-linear response of Beck’s column to a lateral excitation. Int. J. Solids Struct. 14(12), 987–997 (1978)
Silva, M.R.M.: Flexural-flexural oscillations of Beck’s column subjected to a planar harmonic excitation. J. Sound Vib. 60(1), 133–144 (1978)
Luongo, A., Di Egidio, A.: Bifurcation equations through multiple-scales analysis for a continuous model of a planar beam. Nonlinear Dyn. 41(1–3), 171–190 (2005)
Luongo, A., Di Egidio, A.: Divergence, Hopf and double-zero bifurcations of a nonlinear planar beam. Comput. Struct. 84(24–25), 1596–1605 (2006)
Di Egidio, A., Luongo, A., Paolone, A.: Linear and non-linear interactions between static and dynamic bifurcations of damped planar beams. Int. J. Non-Linear Mech. 42(1), 88–98 (2007)
Kavianipour, O., Sadati, S.H.: Effects of damping on the linear stability of a free-free beam subjected to follower and transversal forces. Struct. Eng. Mech. 33, 709–724 (2009)
Katsikadelis, J.T., Tsiatas, G.C.: Non-linear dynamic stability of damped Beck’s column with variable cross-section. Int. J. Non-Linear Mech. 42(1), 164–171 (2007)
Thomsen, J.J.: Chaotic dynamics of the partially follower loaded elastic double pendulum. J. Sound Vib. 188(3), 385–405 (1995)
Tomski, L., Szmidla, J., Uzny, S.: The local and global instability and vibration of systems subjected to non-conservative loading. Thin-Walled Struct. 45, 945–949 (2007)
Uzny, S., Sokól, K., Warys, P.: Flutter and divergence instability regions of a column subjected to the load realized by means of a jet engine with an additional guiding structure. J. Sound Vib. 549, 117580 (2023)
Bigoni, D., Kirillov, O.N., Misseroni, D., Noselli, G., Tommasini, M.: Flutter and divergence instability in the pflüger column: experimental evidence of the Ziegler destabilization paradox. J. Mech. Phys. Solids 116, 99–116 (2018)
Bigoni, D., Misseroni, D.: Structures loaded with a force acting along a fixed straight line, or the “Reut’s column problem’’. J. Mech. Phys. Solids 134, 103741 (2020)
Hagedorn, P.: On the destabilizing effect of non-linear damping in non-conservative systems with follower forces. Int. J. Non-Linear Mech. 5(2), 341–358 (1970)
Casalotti, A., D’Annibale, F.: Improving the linear stability of the visco-elastic Beck’s beam via piezoelectric controllers. J. Appl. Comput. Mech. 7, 1098–1109 (2021)
Casalotti, A., D’Annibale, F.: On the effects of a beam-like piezoelectric passive controller on the linear stability of the visco-elastic Beck’s beam. Mech. Res. Commun. 125, 103980 (2022)
Nayfeh, A.H., Mook, D.T.: Nonlinear Oscillations. Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim (2008)
Nayfeh, A.H.: Perturbation Methods. Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim (2008)
Luongo, A., D’Annibale, F.: Bifurcation analysis of damped visco-elastic planar beams under simultaneous gravitational and follower forces. J. Modern Phys. B 26, 1246015 (2012)
Luongo, A., Zulli, D.: Mathematical Models of Beams and Cables. John Wiley and Sons Inc, Hoboken (2013)
Langthjem, M.A., Sugiyama, Y.: Optimum design of cantilevered columns under the combined action of conservative and nonconservative loads, part II: the damped case. Comput. Struct. 74, 399–408 (2000)
Seyranian, A.P., Mailybaev, A.A.: Multiparameter Stability Theory with Mechanical Applications, vol. 13. World Scientific, Singapore (2003)
Whitney, H.: The general type of singularity of a set of 2n–1 smooth functions of n variables. Duke Math. J. 10, 161–172 (1943)
Kirillov, O.N., Verhulst, F.: Paradoxes of dissipation-induced destabilization or who opened Whitney’s umbrella? ZAMM-J. Appl. Math. Mech./Zeit. Angew. Math. Mech. 90(6), 462–488 (2010)
Nayfeh, A.H., Lacarbonara, W.: On the discretization of spatially continuous systems with quadratic and cubic non-linearities. JMSE Int. J. 41(3), 510–530 (2005)
Luongo, A., Zulli, D., Ferretti, M., D’Annibale, F.: Perturbation Methods and Nonlinear Phenomena: Applications to Continuous Mechanical Systems. Springer, Cham (2024)
Lanczos, C.: Linear Differential Operators. Society for Industrial and Applied Mathematics, Philadelphia (1996)
Migliaccio, G., Ruta, G., Barsotti, R., Bennati, S.: A new shear formula for tapered beamlike solids undergoing large displacements. Meccanica 57, 1713–1734 (2022)
Migliaccio, G.: Analytical evaluation of stresses and strains in inhomogeneous non-prismatic beams undergoing large deflections. Acta Mech. 233, 2815–2827 (2022)
Funding
Open access funding provided by Università degli Studi dell’Aquila within the CRUI-CARE Agreement. No funding was received for conducting this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose. The authors have no conflict of interest to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Derivation of the equations of motion
The equations of motion of the mechanical system presented in Sect. 2 are derived by using the extended Hamilton’s principle, according to which the variational condition (6) has to be satisfied for any kinematically admissible motion of the system in the generic time-interval \([t_1,t_2]\), where \(\delta \mathcal {H}\) is defined as follows
The kinematic constraints associated with the beam inextensibility and unshearability, i.e., Eqs. (2), are accounted for in (A1) via Lagrange’s multipliers, H(s, t) and V(s, t), having the meaning of reactive internal forces along the horizontal and vertical directions, respectively.
Standard procedures based on integration by parts and localization allow the equations of motion of the system to be written in the form
with the constraint equations (2), the geometric boundary conditions (3), and the natural boundary conditions
Equations (A2)–(A3) can be combined and arranged in the form of an integro-differential problem in the single unknown function v(s, t). Specifically, we have obtained the integro-differential Eq. (7) coupled with the four boundary conditions \(v(0,t)=0\), \(v^{\prime }(0,t)=0\), \(M(l,t)=0\), and \(M^{\prime }(l,t) + P v^{\prime }(l,t) = 0\), where the internal bending moment M(s, t) is an explicit function of v(s, t) via the constitutive Eq. (9).
Model parameters
By using Eqs. (2) to express the horizontal displacement u and the cross-section rotation \(\theta \) in terms of the vertical displacement v and expanding in Taylor’s series all Eqs., (7)–(12), up to cubic terms, we obtain non-dimensional equations of motion in the form (13). The non-dimensional parameters (\(\alpha _0\), \(\alpha _1\), \(\alpha _2\), \(\beta _0\), \(\beta _1\), \(\beta _2\), \(\mu \), \(\nu \)) and functions (f, g, h) appearing in Eqs. (13) are defined hereafter.
Specifically, functions f, g, h are defined as follows
while the dimensionaless internal damping (\(\alpha _0\), \(\alpha _1\), \(\alpha _2\)), external damping (\(\beta _0\), \(\beta _1\), \(\beta _2\)), and tip loads (\(\mu \), \(\nu \)) are defined by
Bifurcation equation parameters
By enforcing the compatibility condition (33), we obtain the complex form (34) of the bifurcation equation of the system. The coefficients \(c_1\), \(c_{2 \mu }\), \(c_{2 \nu }\), \(c_{30}\), \(c_{3\alpha }\), \(c_{3\beta }\), in such equation are defined as follows
The complex bifurcation equation (34) can be recast in a real form by introducing two real functions, namely, the real amplitude a(t) and real phase \(\varphi (t)\), such that \(2 A(t)= a(t) e^{i \varphi (t)}\). This yields the real form (35) of the bifurcation equation. The coefficients, \(\rho ^a_{\mu }\), \(\rho ^a_{\nu }\), \(\rho ^a_0\), \(\rho ^a_{\alpha }\), \(\rho ^a_{\beta }\), \(\rho ^a_{\varphi }\), \(\rho ^a_{\varphi }\), \(\rho ^{\varphi }_0\), \(\rho ^{\varphi }_{\alpha }\), \(\rho ^{\varphi }_{\beta }\), in the real form of the bifurcation equation, are defined as follows
where subscript \(\sigma \) represents the subscript \(\mu \) or \(\nu \), subscript \(\tau \) stands for 0, \(\alpha \), or \(\beta \), and, finally, the superscripts R and I denote the real and imaginary part, respectively, of the c-coefficients.
Model discretization
The numerical examples reported in section 5 illustrate comparisons between the results obtained via the Multiple Scales Method and those of a purely numerical method based on a Galerkin discretization of the original continuous system to solve the differential problem (13).
In the spirit of the discretization method, the transverse displacement of the beam points, v(s, t), is expressed as a linear combination of shape functions, \(\phi _k(s)\), with time-varying amplitudes, \(q_k(t)\), as follows
where the shape functions \(\phi _n(s)\) considered here, which coincides with the eigenfunctions of problem (14) when all damping and load parameters are put to zero, are written in the form
with \(\gamma _n\) satisfying the condition \(\cos (\gamma _n)\cosh (\gamma _n)=-1\), \(n = 1,2,...,N\).
The time-varying amplitudes, \(q_n(t)\), are determined by combining Eqs. (13), (D10), and (D11), and by using the orthogonality properties of the shape functions \(\phi _n(s)\). This yields a set of N nonlinear ordinary differential equations in the N unknown functions \(q_n(t)\), which can be solved numerically (by using the Matlab function ode15s, e.g.).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Migliaccio, G., D’Annibale, F. On the role of different nonlinear damping forms in the dynamic behavior of the generalized Beck’s column. Nonlinear Dyn (2024). https://doi.org/10.1007/s11071-024-09825-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11071-024-09825-z