
Abstract
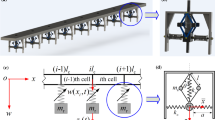
Metamaterials with high-static-low-dynamic stiffness (HSLDS) resonators possess the ability in low/ultra-low frequency flexural wave attenuation. However, the inherent geometrical nonlinearity of the HSLDS resonators was used to be neglected for simplicity, leading to severe restriction of its operating range. In this paper, the intrinsic geometric nonlinearity of the HSLDS resonator is considered to extend its applications. The nonlinear dynamic model of a metamaterial beam coupled with nonlinear HSLDS resonators is established based on the Galerkin method. An efficient frequency-domain analysis strategy, which consists of the harmonic balance method (HBM), arc-length continuation, and Hill’s method, is then adopted to compute periodic solution branches. Results show that once the excitation amplitude reaches some extent and the nonlinear stiffness of the resonator plays a dominant role due to higher response, only the nonlinear model can capture the dynamics of the coupling system. Furthermore, in the case of large responses, double peaks in frequency response bend right, and the second peak is significantly suppressed. Meanwhile, the location and wave attenuation performance of the bandgap remains unchanged. The results indicate that the nonlinear metamaterial beam performs better in the range out of bandgap. Hence, the nonlinear metamaterial is more robust against mistuning. Due to the above merit, the operating range of HSLDS resonators and the bearable excitation amplitude in nonlinear metamaterial beam are enhanced four times compared to linear metamaterial beam. Thus, the metamaterial beam with nonlinear HSLDS resonators has better environmental adaptability and broader application prospects.









Similar content being viewed by others

Data availability
The datasets analyzed during the current study are available from the corresponding author on reasonable request.
References
Dong, Y., Itoh, T.: Metamaterial-based antennas. Proc. IEEE 100(7), 2271–2285 (2012)
Park, J., Youn, J.R., Song, Y.S.: hydrodynamic metamaterial cloak for drag-free flow. Phys. Rev. Lett. 123(7), 074502 (2019)
Park, J.J., et al.: Acoustic superlens using membrane-based metamaterials. Appl. Phys. Lett. 106(5), 051901 (2015)
Iemma, U.: Theoretical and numerical modeling of acoustic metamaterials for aeroacoustic applications. Aerospace 3(2), 15 (2016)
Hashemi, M.R., Cakmakyapan, S., Jarrahi, M.: Reconfigurable metamaterials for terahertz wave manipulation. Rep. Prog. Phys. 80(9), 094501 (2017)
Zheng, Y., et al.: A piezo-metastructure with bistable circuit shunts for adaptive nonreciprocal wave transmission. Smart Mater. Struct. 28(4), 045005 (2019)
Emerson, T.A., Manimala, J.M.: Passive-adaptive mechanical wave manipulation using nonlinear metamaterial plates. Acta Mech. 231(11), 4665–4681 (2020)
Elmadih, W., et al.: Three-dimensional resonating metamaterials for low-frequency vibration attenuation. Sci. Rep. 9(1), 11503 (2019)
Xu, X., et al.: Tailoring vibration suppression bands with hierarchical metamaterials containing local resonators. J. Sound Vib.. 442, 237–248 (2019)
Sigalas, M.M., Economou, E.N.: Elastic and acoustic wave band structure. J. Sound Vib. 158(2), 377–382 (1992)
Liu, Z., et al.: Locally resonant sonic materials. Science 289(5485), 1734–1736 (2000)
Pai, P.F., Peng, H., Jiang, S.: Acoustic metamaterial beams based on multi-frequency vibration absorbers. Int. J. Mech. Sci. 79, 195–205 (2014)
Chen, Y.Y., Huang, G.L., Sun, C.T.: Band gap control in an active elastic metamaterial with negative capacitance piezoelectric shunting. J. Vib. Acoust. 136(6) 061008 (2014)
Frandsen, N.M.M., et al.: Inertial amplification of continuous structures: Large band gaps from small masses. J. Appl. Phys. 119(12), 124902 (2016)
Ma, J., et al.: Dynamic analysis of periodic vibration suppressors with multiple secondary oscillators. J. Sound Vib. 424, 94–111 (2018)
Droz, C., et al.: Improving sound transmission loss at ring frequency of a curved panel using tunable 3D-printed small-scale resonators. J. Acoust. Soc. America 145(1), 72–78 (2019)
Meng, H., et al.: Rainbow metamaterials for broadband multi-frequency vibration attenuation: numerical analysis and experimental validation. J. Sound Vib. 465, 115005 (2020)
Oudich, M., et al.: A sonic band gap based on the locally resonant phononic plates with stubs. New J. Phys. 12(8), 083049 (2010)
Oudich, M., et al.: Experimental evidence of locally resonant sonic band gap in two-dimensional phononic stubbed plates. Phys. Rev. B 84(16), 165136 (2011)
Carrella, A., Brennan, M.J., Waters, T.P.: Static analysis of a passive vibration isolator with quasi-zero-stiffness characteristic. J. Sound Vib. 301(3), 678–689 (2007)
Carrella, A., et al.: Force and displacement transmissibility of a nonlinear isolator with high-static-low-dynamic-stiffness. Int. J. Mech. Sci. 55(1), 22–29 (2012)
Liu, X., Huang, X., Hua, H.: On the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negative stiffness corrector. J. Sound Vib. 332(14), 3359–3376 (2013)
Huang, X., et al.: Vibration isolation characteristics of a nonlinear isolator using Euler buckled beam as negative stiffness corrector: a theoretical and experimental study. J. Sound Vib. 333(4), 1132–1148 (2014)
Fulcher, B.A., et al., Analytical and experimental investigation of buckled beams as negative stiffness elements for passive vibration and shock isolation systems. J. Vib. Acoust. 136(3) 031009 (2014)
Dong, G., et al.: Simulated and experimental studies on a high-static-low-dynamic stiffness isolator using magnetic negative stiffness spring. Mech. Syst. Signal Process. 86, 188–203 (2017)
Zheng, Y., et al.: A Stewart isolator with high-static-low-dynamic stiffness struts based on negative stiffness magnetic springs. J. Sound Vib. 422, 390–408 (2018)
Zhou, J., et al.: Local resonator with high-static-low-dynamic stiffness for lowering band gaps of flexural wave in beams. J. Appl. Phys. 121(4), 044902 (2017)
Wang, K., et al.: Lower band gaps of longitudinal wave in a one-dimensional periodic rod by exploiting geometrical nonlinearity. Mech. Syst. Signal Process. 124, 664–678 (2019)
Cai, C., et al.: Design and numerical validation of quasi-zero-stiffness metamaterials for very low-frequency band gaps. Compos. Struct. 236, 111862 (2020)
Peng, F., et al.: Low-frequency vibration suppression of metastructure beam with high-static–low-dynamic stiffness resonators employing magnetic spring. J. Vib. Control 30(1–2), 237–249
Wu, Q., et al.: Low-frequency multi-mode vibration suppression of a metastructure beam with two-stage high-static-low-dynamic stiffness oscillators. Acta Mech. 230(12), 4341–4356 (2019)
Cveticanin, L., Mester, G.: Theory of acoustic metamaterials and metamaterial beams: an overview. Acta Polytechnica Hungarica 13(7), 43–62 (2016)
Cveticanin, L., Cveticanin, D.: Application of the acoustic metamaterial in engineering: an overview. Rom. J. Mech. 2(1), 29–36 (2017)
Cveticanin, L., Zukovic, M.: Negative effective mass in acoustic metamaterial with nonlinear mass-in-mass subsystems. Commun. Nonlinear Sci. Numer. Simul. 51, 89–104 (2017)
Cveticanin, L., Zukovic, M., Cveticanin, D.: On the elastic metamaterial with negative effective mass. J. Sound Vib. 436, 295–309 (2018)
Fang, X., et al.: Broadband and tunable one-dimensional strongly nonlinear acoustic metamaterials: theoretical study. Phys. Rev. E 94(5), 052206 (2016)
Fang, X., et al.: Wave propagation in a nonlinear acoustic metamaterial beam considering third harmonic generation. New J. Phys. 20(12), 123028 (2018)
Casalotti, A., El-Borgi, S., Lacarbonara, W.: Metamaterial beam with embedded nonlinear vibration absorbers. Int. J. Non-Linear Mech. 98, 32–42 (2018)
Xie, L., et al.: Bifurcation tracking by harmonic balance method for performance tuning of nonlinear dynamical systems. Mech. Syst. Signal Process. 88, 445–461 (2017)
Wu, J., Hong, L., Jiang, J.: A robust and efficient stability analysis of periodic solutions based on harmonic balance method and Floquet-Hill formulation. Mech. Syst. Signal Process. 173, 109057 (2022)
Wu, J., Hong, L., Jiang, J.: A comparative study on multi- and variable-coefficient harmonic balance methods for quasi-periodic solutions. Mech. Syst. Signal Process. 187, 109929 (2023)
Cameron, T.M., Griffin, J.H.: An alternating frequency/time domain method for calculating the steady-state response of nonlinear dynamic systems. J. Appl. Mech. 56(1), 149–154 (1989)
Moore, G.: Floquet theory as a computational tool. SIAM J. Numer. Anal. 42(6), 2522–2568 (2005)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant No. 11872290), NSAF (Grant No. U1430129), and the National Natural Science Foundation of China (Grant No. 12072247).
Funding
This work was supported by the National Natural Science Foundation of China (Grant No. 11872290), NSAF (Grant No. U1430129), and the National Natural Science Foundation of China (Grant No. 12072247).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Harmonic balance method
Introduce the derivative operator:
The velocity and acceleration can be expressed by Fourier coefficient vectors, which are given by Eq. (17):
Substituting Eq. (16), Eq. (A1) and Eq. (A2) into Eq. (15), and balancing the harmonic terms by utilizing the orthogonality property of trigonometric basis, the nonlinear system Eq. (15) of differential equations in the time domain is transformed into nonlinear algebraic equations in the frequency domain:
where \({\varvec{Z}}(\omega )\) is the dynamic stiffness matrix, which is block-diagonal:
With the above derivation of equations of motion, the problem is converted into finding the Fourier coefficients of Eq. (15), which can be accomplished by the New-Raphson procedure. Note that the nonlinear term \({\varvec{f}}_{nl}\) and \({\varvec{F}}_{nl}\) cannot be directly computed in the frequency domain. The alternating frequency-time(AFT) scheme [42], which computes the nonlinear term in the time domain and then switches back to the frequency domain, is coupled with standard HBM.
1.2 Tangent prediction
With the calculated solution point \(({\varvec{X}}_{i} ;\omega_{i} )\) on the hand, the predicted point \((\overline{\user2{X}}_{i + 1} ;\overline{\omega }_{i + 1} )\) can be obtained using the first-order Taylor expansion of Eq. (15) at point \(({\varvec{X}}_{i} ;\omega_{i} )\). After neglecting high-order terms and introducing a constrain equation, a tangent vector \({\varvec{t}} = (\Delta {\varvec{X}};\Delta \omega )\) can be obtained from
where \({\varvec{R}}_{{\varvec{X}}} = {{\partial {\varvec{R}}} \mathord{\left/ {\vphantom {{\partial {\varvec{R}}} {\partial {\varvec{X}}}}} \right. \kern-0pt} {\partial {\varvec{X}}}}\) is the Jacobian matrix and is given by:
Then, a normalization condition is added to unify the tangent vector with respect to the parameter \(\omega\):
Eventually, the predicted point can be given at a distance \(\Delta s_{i}\) along the direction \({\varvec{t}}_{i}\):
where \(\Delta s_{i}\) represents the arc length of \(i - {\text{th}}\) solution point. Note that a step control decides whether a continuation algorithm works well, affecting the continuation’s correctness and robustness. In Wu’s study [40], an improved adaptive method for arc-length control is proposed and adopted in our work.
1.3 Orthogonal corrections
In general, the predicted point is not a solution of Eq. (15), and the next solution point can be then computed by using the New-Raphson algorithm iteratively in the direction orthogonal to tangent \({\varvec{t}}\) until the criteria \(\left\| {{\varvec{R}}_{i + 1}^{k} } \right\| \le \varepsilon\) satisfies, where \(\varepsilon\) is a user-defined convergence criterion.
1.4 Stability and bifurcation analysis with Hill’s method
Hill’s method is well-known for determining a solution branch’s stabilities and bifurcation behaviors in the frequency domain. Suppose that the solution \({\varvec{x}}^{*} (t)\) in the time domain is perturbed with a disturbance term \(e^{\Lambda t} {\varvec{s}}(t)\), where \(e^{\Lambda t}\) is the decay term and \({\varvec{s}}(t)\) the periodic term:
By substituting Eq. (A10) into Eq. (15) and applying the Galerkin procedure, the following quadratic eigenvalue problem is obtained:
where \({\varvec{S}}\) are the complex eigenvectors and
Then, the Hill’s eigenvalues can be obtained from
where \({\varvec{H}}\) is consistent with the Hill matrix in the state space, which can be expressed as
Note that \(2L = 2n \times (2H + 1)\) eigenvalues can be obtained from Eq. (41), but only \(2n\) of them have the physical meaning and correspond to the Floquet exponents, denoted by \(\lambda_{i} ,{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} i = 1,{\kern 1pt} {\kern 1pt} {\kern 1pt} 2, \ldots ,{\kern 1pt} {\kern 1pt} {\kern 1pt} 2n\) in the following. Selecting the \(2n\) eigenvalues with the smallest imaginary part in the modulus is widely used to approximate Floquet exponents [43]. Once the approximated Floquet exponents are filtered, the stability and bifurcation behaviors of a periodic solution can thus be analyzed by observing their evolvement.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wu, Q., Liu, C., Su, Y. et al. Influences of inherent geometrical nonlinearity of high-static-low-dynamic-stiffness resonator on flexural wave attenuation performance of metamaterial beam. Nonlinear Dyn 112, 7831–7845 (2024). https://doi.org/10.1007/s11071-024-09519-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-024-09519-6