
Abstract
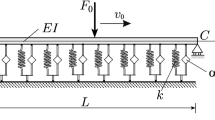
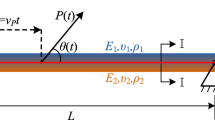
This paper investigates the nonlinear dynamic behavior of a nonlocal functionally graded Euler–Bernoulli beam resting on a fractional visco-Pasternak foundation and subjected to harmonic loads. The proposed model captures both, nonlocal parameter considering the elastic stress gradient field and a material length scale parameter considering the strain gradient stress field. Additionally, the von Karman strain–displacement relation is used to describe the nonlinear geometrical beam behavior. The power-law model is utilized to represent the material variations across the thickness direction of the functionally graded beam. The following steps are conducted in this research study. At first, the governing equation of motion is derived using Hamilton’s principle and then reduced to the nonlinear fractional-order differential equation through the single-mode Galerkin approximation. The methodology to determine steady-state amplitude–frequency responses via incremental harmonic balance method and continuation technique is presented. The obtained periodic solutions are verified against the perturbation multiple scales method for the weakly nonlinear case and numerical integration Newmark method in the case of strong nonlinearity. It has been shown that the application of the incremental harmonic balance method in the analysis of nonlocal strain gradient theory-based structures can lead to more reliable studies for strongly nonlinear systems. In the parametric study, it is shown that, on the one hand, parameters of the visco-Pasternak foundation and power-law index remarkable affect the amplitudes responses. On the contrary, the nonlocal and the length-scale parameters are having a small influence on the amplitude–frequency response. Finally, the effects of the fractional derivative order on the system’s damping are displayed at time response diagrams and subsequently discussed.















Similar content being viewed by others

Data availability
No datasets are associated with this manuscript. The datasets used for generating the plots and results during the current study can be directly obtained from the numerical simulation of the related mathematical equations in the manuscript.
References
Ansari, R., et al.: A sixth-order compact finite difference method for vibrational analysis of nanobeams embedded in an elastic medium based on nonlocal beam theory. Math. Comput. Model. 54(11–12), 2577–2586 (2011)
Askarian, A.R., Permoon, M.R., Shakouri, M.: Vibration analysis of pipes conveying fluid resting on a fractional Kelvin-Voigt viscoelastic foundation with general boundary conditions. Int. J. Mech. Sci. p. 105702 (2020)
Atanackovic, T.M., Stankovic, B.: Stability of an elastic rod on a fractional derivative type of foundation. J. Sound Vib. 277(1–2), 149–161 (2004)
Barretta, R., et al.: Functionally graded Timoshenko nanobeams: a novel nonlocal gradient formulation. Compos. Part B Eng. 100, 208–219 (2016)
Batra, R.C.: Misuse of Eringens nonlocal elasticity theory for functionally graded materials. Int. J. Eng. Sci. 159, 103425 (2021)
Bhattiprolu, U., Bajaj, A.K., Davies, P.: Periodic response predictions of beams on nonlinear and viscoelastic unilateral foundations using incremental harmonic balance method. Int. J. Solids Struct. 99, 28–39 (2016)
Bursi, O.S., SHING, P.-S.B.: Evaluation of some implicit time-stepping algorithms for pseudodynamic tests. Earthq. Eng. Struct. Dyn. 25(4), 333–355 (1996)
Dou, S., Jensen, J.S.: Optimization of nonlinear structural resonance using the incremental harmonic balance method. J. Sound Vib. 334, 239–254 (2015)
El-Borgi, S., Fernandes, R., Reddy, J.N.: Non-local free and forced vibrations of graded nanobeams resting on a non-linear elastic foundation. Int. J. Non-Linear Mech. 77, 348–363 (2015)
Emam, S.A., Nayfeh, A.H.: Postbuckling and free vibrations of composite beams. Compos. Struct. 88(4), 636–642 (2009)
Engelnkemper, S., et al.: Continuation for thin film hydrodynamics and related scalar problems. In: Computational Modelling of Bifurcations and Instabilities in Fluid Dynamics. Springer, pp. 459–501 (2019)
Eringen, A Cemal: On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 54(9), 4703–4710 (1983)
Evangelatos, Georgios I,., Spanos, P.D.: An accelerated Newmark scheme for integrating the equation of motion of nonlinear systems comprising restoring elements governed by fractional derivatives. In: Recent advances in mechanics. Springer, pp. 159- 177 (2011)
Eyebe, G.J., et al.: Nonlinear vibration of a nonlocal nanobeam resting on fractional-order viscoelastic Pasternak foundations. Fractal Fract. 2(3), 21 (2018)
Fan, Y., Xiang, Y., Shen, H.-S.: Nonlinear dynamics of temperature-dependent FG-GRC laminated beams resting on visco-Pasternak foundations. Int. J. Struct. Stab. Dyn. 20(01), 2050012 (2020)
Gao, Y., Xiao, W., Zhu, H.: Nonlinear vibration of functionally graded nano-tubes using nonlocal strain gradient theory and a two-steps perturbation method. Struct. Eng. Mech. 69(2), 205–219 (2019)
Ghadiri, M., Hosseini, S.H.S.: Parametric excitation of pre-stressed graphene sheets under magnetic field: nonlinear vibration and dynamic instability. Int. J. Struct. Stab. Dyn. 19(11), 1950135 (2019)
Ghayesh, M.H., Farajpour, A.: A review on the mechanics of functionally graded nanoscale and microscale structures. Int. J. Eng. Sci. 137, 8–36 (2019)
Hashemian, M. et al. Nonlocal dynamic stability analysis of a Timoshenko nanobeam subjected to a sequence of moving nanoparticles considering surface effects. Mech. Mater., p. 103452 (2020)
He, X.Q., Kitipornchai, S., Liew, K.M.: Resonance analysis of multi-layered graphene sheets used as nanoscale resonators. Nanotechnology 16(10), 2086 (2005)
Hung, E.S., Senturia, S.D.: Extending the travel range of analog-tuned electrostatic actuators. J. Microelectromech. Syst. 8(4), 497–505 (1999)
Jafarsadeghi-Pournaki, I. et al.: Size-dependent dynamics of a FG nanobeam near nonlinear resonances induced by heat. Appl. Math. Model. (2020)
Jalaei, M.H., Arani, A.G., NguyenXuan, H.: Investigation of thermal and magnetic field effects on the dynamic instability of FG Timoshenko nanobeam employing nonlocal strain gradient theory. Int. J. Mech. Sci. 161, 105043 (2019)
Janevski, G., Despenić, N., Pavlović, I.: Thermal buckling and free vibration of Euler-Bernoulli FG nanobeams based on the higher-order nonlocal strain gradient theory. Arch. Mech. 72(2), (2020)
Janevski, G., Pavlović, I., Despenić, N.: Thermal buckling and free vibration of Timoshenko FG nanobeams based on the higher-order nonlocal strain gradient theory. J. Mech. Mater. Struct. 15(1), 107–133 (2020)
Karličić, D., et al.: Dynamic stability of single- walled carbon nanotube embedded in a viscoelastic medium under the influence of the axially harmonic load. Compos. Struct. 162, 227–243 (2017)
Karličić, D. et al.: Nonlinear energy harvester with coupled Duffing oscillators. Commun. Nonlinear Sci. Numer. Simul. p. 105394 (2020)
Karličić, D. et al.: Parametrically amplified Mathieu-Duffing nonlinear energy harvesters. J. Sound Vib., p. 115677 (2020)
Lam, David CC., et al.: Experiments and theory in strain gradient elasticity. J. Mech. Phys. Solids 51(8), 1477–1508 (2003)
Lewandowski, R., Wielentejczyk, P.: Nonlinear vibration of viscoelastic beams described using fractional order derivatives. J. Sound Vib. 399, 228–243 (2017)
Li, L., Yujin, H.: Nonlinear bending and free vibration analyses of nonlocal strain gradient beams made of functionally graded material. Int. J. Eng. Sci. 107, 77–97 (2016)
Li, L., Yujin, H.: Wave propagation in fluid-conveying viscoelastic carbon nanotubes based on nonlocal strain gradient theory. Comput. Mater. Sci. 112, 282–288 (2016)
Li, L., Yujin, H., Li, X.: Longitudinal vibration of size-dependent rods via nonlocal strain gradient theory. Int. J. Mech. Sci. 115, 135–144 (2016)
Li, Li., et al.: Size-dependent effects on critical flow velocity of fluid-conveying microtubes via nonlocal strain gradient theory. Microfluid. Nanofluid. 20(5), 76 (2016)
Li, X., et al.: Bending, buckling and vibration of axially functionally graded beams based on nonlocal strain gradient theory. Compos. Struct. 165, 250–265 (2017)
Li, X., et al.: Mechanical characterization of micro/nanoscale structures for MEMS/NEMS applications using nanoindentation techniques. Ultramicroscopy 97(1–4), 481–494 (2003)
Lim, C.W., Zhang, G., Reddy, J.N.: A higher-order nonlocal elasticity and strain gradient theory and its applications in wave propagation. J. Mech. Phys. Solids 78, 298–313 (2015)
Liu, Hu., Lv, Z., Han, W.: Nonlinear free vibration of geometrically imperfect functionally graded sandwich nanobeams based on nonlocal strain gradient theory. Compos. Struct. 214, 47–61 (2019)
Mahamood, R.M. et al.: Functionally graded material: an overview. In: Proceedings of the World Congress on Engineering 2012. Vol. 3. London, UK: International Association of Engineers (IAENG) (2012)
Mehralian, F., Beni, Y.T., Zeverdejani, Mehran Karimi: Calibration of nonlocal strain gradient shell model for buckling analysis of nanotubes using molecular dynamics simulations. Physica B Cond. Matter 521, 102–111 (2017)
Mohamed, SA.: A fractional differential quadrature method for fractional differential equations and fractional eigenvalue problems. Math. Methods Appl. Sci., pp. 1-24 (2020). https://doi.org/10.1002/mma.6753.
Moory-Shirbani, M., et al.: Experimental and mathematical analysis of a piezoelectrically actuated multilayered imperfect microbeam subjected to applied electric potential. Compos. Struct. 184, 950–960 (2018)
Moser, Y., Gijs, M.A.M.: Miniaturized flexible temperature sensor. J. Microelectromech. Syst. 16(6), 1349–1354 (2007)
Mustapha, K.B., Zhong, Z.W.: Free transverse vibration of an axially loaded non-prismatic single-walled carbon nanotube embedded in a two-parameter elastic medium. Comput. Mater. Sci. 50(2), 742–751 (2010)
Najar, F., et al.: Dynamics and global stability of beam-based electrostatic microactuators. J. Vib. Control 16(5), 721–748 (2010)
Nayfeh, A.H., Lacarbonara, W.: On the discretization of distributed-parameter systems with quadratic and cubic nonlinearities. Nonlinear Dyn. 13(3), 203–220 (1997)
Nešić, N. et al.: Nonlinear superharmonic resonance analysis of a nonlocal beam on a fractional visco-Pasternak foundation. In: Proceedings of the Institution of Mechanical Engineers, Part C: J. Mech. Eng. Sci. (2020). DOI: 0954406220936322
Pavlović, I.R., et al.: Dynamic behavior of two elastically connected nanobeams under a white noise process. Facta Univ. Ser. Mech. Eng. 18(2), 219–227 (2020)
Peddieson, J., Buchanan, G.R., McNitt, R.P.: Application of nonlocal continuum models to nanotechnology. Int. J. Eng. Sci. 41(3–5), 305–312 (2003)
Podlubny, Igor: Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications. Elsevier (1998)
Pradhan, S.C., Phadikar, J.K.: Nonlocal elasticity theory for vibration of nanoplates. J. Sound Vib. 325(1–2), 206–223 (2009)
Ramakrishnan, V., Feeny, B.F.: Resonances of a forced Mathieu equation with reference to wind turbine blades. J. Vib. Acoust. 134(6) (2012)
Reddy, J.N.: Nonlocal theories for bending, buckling and vibration of beams. Int. J. Eng. Sci. 45(2–8), 288–307 (2007)
Rossikhin, Y., Shitikova, M.V.: A new method for solving dynamic problems of fractional derivative viscoelasticity. Int. J. Eng. Sci. 39(2), 149–176 (2001)
Rossikhin, Y.A., Shitikova, M.V.: Applications of fractional calculus to dynamic problems of linear and nonlinear hereditary mechanics of solids. Appl. Mech. Rev. 50(1), 15–67 (1997)
Saffari, S., Hashemian, M., Toghraie, D.: Dynamic stability of functionally graded nanobeam based on nonlocal Timoshenko theory considering surface effects. Phys. B Cond. Matter 520, 97–105 (2017)
Salehipour, H., Shahidi, A.R., Nahvi, H.: Modified nonlocal elasticity theory for functionally graded materials. Int. J. Eng. Sci. 90, 44–57 (2015)
Shitikova, M.V.: The fractional derivative expansion method in nonlinear dynamic analysis of structures. Nonlinear Dyn. 99(1), 109–122 (2020)
Şimşek, M.: Nonlinear free vibration of a functionally graded nanobeam using nonlocal strain gradient theory and a novel Hamiltonian approach. Int. J. Eng. Sci. 105, 12–27 (2016)
Sourani, P. et al.: A comparison of the Bolotin and incremental harmonic balance methods in the dynamic stability analysis of an Euler-Bernoulli nanobeam based on the nonlocal strain gradient theory and surface effects. Mech. Mater. p. 103403 (2020)
Teodoro, G.S., Machado, J.A.T., De Oliveira, E.C.: A review of definitions of fractional derivatives and other operators. J. Comput. Phys. 388, 195–208 (2019)
Togun, N., Bağdatli, S.M.: Non-linear vibration of a nanobeam on a Pasternak elastic foundation based on non-local Euler-Bernoulli beam theory. Math. Comput. Appl. 21(1), 3 (2016)
Ton-That, H.L.: A new C0 third-order shear deformation theory for the nonlinear free vibration analysis of stiffened functionally graded plates. Facta Universitatis, Ser. Mech. Eng. 19(2), 285–305 (2021)
Trabelssi, M., El-Borgi, S., Friswell, M.I.: A highorder FEM formulation for free and forced vibration analysis of a nonlocal nonlinear graded Timoshenko nanobeam based on the weak form quadrature element method. Arch. Appl. Mech., pp. 1–24 (2020)
Wang, G.-F., Feng, X.-Q.: Effects of surface elasticity and residual surface tension on the natural frequency of microbeams. Appl. Phys. Lett. 90(23), 231904 (2007)
Wang, J., Shen, H.: Nonlinear vibrations of axially moving simply supported viscoelastic nanobeams based on nonlocal strain gradient theory. J. Phys. Cond. Matter 31(48), 485403 (2019)
Wang, S., et al.: Applications of incremental harmonic balance method combined with equivalent piecewise linearization on vibrations of nonlinear stiffness systems. J. Sound Vib. 441, 111–125 (2019)
Wang, Z.L., Wu, W.: Nanotechnologyenabled energy harvesting for self-powered micro-/nanosystems. Angewandte Chemie Int. Ed. 51(47), 11700–11721 (2012)
Wen, S.-F., et al.: Dynamical analysis of strongly nonlinear fractional-order Mathieu-Duffing equation. Chaos Interdiscip. J. Nonlinear Sci. 26(8), 084309 (2016)
Yang, F.A.C.M., et al.: Couple stress based strain gradient theory for elasticity. Int. J. Solids Struct. 39(10), 2731–2743 (2002)
Yokoyama, T.: Vibrations and transient responses of Timoshenko beams resting on elastic foundations. Ingenieur-Archiv 57(2), 81–90 (1987)
Younesian, D. et al.: Elastic and viscoelastic foundations: a review on linear and nonlinear vibration modeling and applications. Nonlinear Dyn. pp. 1–43 (2019)
Zavracky, P.M., et al.: Microswitches and microrelays with a view toward microwave applications. Int. J. RF Microwave Comput. Aided Eng. Co-sponsored Center Adv. Manuf. Pack. Microwave Optic. Digital Electron. (CAMPmode) Univ. Colorado Boulder 9(4), 338–347 (1999)
Zhang, G., Wu, Z., Li, Y.: Nonlinear dynamic analysis of fractional damped viscoelastic beams. Int. J. Struct. Stab. Dyn. 19(11), 1950129 (2019)
Zhao, X. et al.: Coupled thermoelastic nonlocal forced vibration of an axially moving micro/nano-beam. Int. J. Mech. Sci., p. 106600 (2021)
Zhen, Y., Zhou, L.: Wave propagation in fluidconveying viscoelastic carbon nanotubes under longitudinal magnetic field with thermal and surface effect via nonlocal strain gradient theory. Mod. Phys. Lett. B 31(08), 1750069 (2017)
Zhou, Y., et al.: Implicit-explicit time integration of nonlinear fractional differential equations. Appl. Numer. Math. 156, 555–583 (2020)
Acknowledgements
This research was sponsored by the Serbian Ministry of Education, Science, and Technological Development. D.K. and M.C were funded by the Marie Skłodowska—Curie Actions—European Commission fellowship (Grant No. 799201—METACTIVE, and Grant No. 896942—METASINK, respectively).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest:
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1
Elements of the Jacobi matrix \({\varvec{M}}=\varvec{M_1}+\varvec{M_2^{\alpha }}\), the corrective vector \({\varvec{R}}=\varvec{R_1}+\varvec{R_2^{\alpha }}\), and vector \({\varvec{V}}=\varvec{V_1}+\varvec{V_2^{\alpha }}\) are defined as:
Within each incremental step, only a set of linear equations Eq. (58) has to be solved to obtain the data for the next stage. By applying the procedure established at [47, 69] elements of the matrix \(\varvec{M_2^{\alpha }}\), and vectors \(\varvec{R_2^{\alpha }}\) and \(\varvec{V_2^{\alpha }}\) can be expressed as
Elements of matrix \(\varvec{M_2^{\alpha }}\), and vectors \(\varvec{R_2^{\alpha }}\) and \(\varvec{V_2^{\alpha }}\) from Eq. (73) are:
where \(\delta _{ij}\) is Kronecker delta.
Appendix 2
1.1 Multiple scales method
Multiple scales is the analytical perturbation method for constructing approximate solutions of nonlinear differential equations. This method is well established in the literature, but it is only valid for small nonlinearities and damping. Therefore, we will use it here only for validation purposes. Equation (46) is well known as the forced Duffing fractional-order differential equation, which can be expressed in terms of small scale parameter \(\epsilon \) as in Eq. (77). Let assume for simplicity \(f_0=0, f=f_1\).
Here, we introduce new parameters as \(\gamma =\epsilon {\overline{\gamma }}\) and \(\theta =\epsilon {\overline{\theta }}\). The small bookkeeping parameter \(\epsilon \) is put in front of the fractional and nonlinear terms to have weak damping and weak nonlinearity. Please note that the forcing term in Eq. (77) is of the order one (also known as hard forcing), which will help us to study secondary resonances in the system by using the perturbation analysis of the first order. Forcing of order \(\epsilon \) would indicate a primary resonance that is the same as in the Duffing equation [52].
Using the multiple scales method, we will seek the solution of Eq. (77) in the following form:
Here, \(T_0=\tau \) is the fast time scale and \(T_1=\epsilon \tau \) is the slow time scale. We will analyze the system for superharmonic resonance conditions. Firstly, let us define the time derivatives as
where \(D_n=\frac{\partial }{\partial T_n}, (n=0,1,2,\dots )\) and \(D^{\alpha -n}_{n+}=\frac{\partial ^{\alpha -n}}{\partial T_{n+}^{\alpha -n}}, (n=0,1,2,\ldots )\) are classical and Riemann–Liouville’s fractional derivative for new time scales [58]. For the fractional derivative of the exponential function [58], restricted to the first- and second-order approximations, the following relationship will be used:
where i is the imaginary unit. Substituting Eqs. (78), (79), (80), (81) into Eq. (77) and then extracting coefficients of \(\epsilon ^0\) and \(\epsilon ^1\), we obtain the following equations
The solution of Eq. (83) is sought in the form
where A is a complex function in terms of slow time scale, and \(\Lambda \) is defined as:
1.1.1 Superharmonic resonance \(3\Omega \approx \omega _0\)
Since we have only cubic nonlinearity in Eq. (77), we will consider the case when \(3\Omega =\omega _0+\epsilon \sigma \), where \(\sigma \) is the detuning parameter. By substituting \(q_0\) from Eq. (85) into Eq. (84) and removing the secular terms that grow in time unbounded, i.e., the coefficients of \(e^{i\omega _0 T_0}\), we obtain the corresponding solvability conditions as:
where \(A'=D_1A\). Then, we use the polar form \(A=\frac{1}{2}ae^{i\varphi }\), where the real-valued functions a and \(\varphi \) are the amplitude and phase lag of time response, respectively. By substituting A in Eq. (87) and separation of real and imaginary parts, we obtain
with \(\zeta =\sigma T_1-\varphi \) denoting the new phase angle. Then, we utilize steady-state conditions \(a'=0\), \(\zeta '=0\) in Eq. (88) and Eq. (89), which leads to the relationship between the response amplitude and the detuning parameter in the following form
After simple algebra transformations over Eq. (90) and Eq. (91), the following polynomial equation can be obtained
with K and M given as
from where the relationship for amplitude–frequency curves can be obtained as:
One can notice that all the parameters contribute to the appearance of the superharmonic resonance of order 1/3, i.e., we have interaction of terms of fractional-order, nonlinear, and external excitation.
Appendix 3
1.1 Newmark method
We use Grunwald–Letnikov representation of fractional derivative and apply the Newmark–Beta method for numerical integration. We use two different meshes, coarse mesh for time integration and fine mesh for fractional derivative approximation. Grunwald–Letnikov representation of a fractional derivative of a function \(q({\overline{\tau }})\) at a point of time \({\overline{\tau }}\) is:
where
Grunwald–Letnikov coefficients can also be represented in recursive form as:
where \(\Delta {\overline{\tau }}\) is time step for coarse mesh, and h is time step for fine mesh.
Representation of fractional derivative given by Eq.(96) in fine mesh is:
where:
p is the number of past terms of length h in a time integration step of length \(\Delta {\overline{\tau }}\),
j are previous time steps of length \(\Delta {\overline{\tau }}\) that can be approximated accurately by a backward Taylor expansion using the displacement, velocity, and acceleration at a certain time step i,
k represents overall chunks of j time steps that must be taken into consideration to accurately approximate the fractional derivative at a given point.
Taylor backward expansion for the last jp time steps can be represented as in Eq. (101).
where \(q_i\), \({\dot{q}}_i\) and \(\ddot{q}_i\) are displacement, velocity, and acceleration, respectfully, at time step i.
Let us neglect higher-order terms. Equation (101) can be written in the matrix form Eq. (102).
By analogy, the displacements from the step \(i-jp\) to the \(i-(2jp-1)\) in matrix form in terms of displacements, velocity and acceleration of the \(i-jp\) are given by Eq. (103). Here can jerk also be included, but we didn’t do this.
Since we omitted jerk, \(\left[ H \right] =\left[ H_0 \right] \). Substituting Eq. (101), Eq. (102) and Eq. (103) in Eq. (100), we obtain the following expressions:
Lets consider equation of motion Eq.(48) in two consecutive time instants.
where
By substituting Eq.(106) in Eq.(107), we obtain
where
Note that in case of \(\Delta f_i=const\), Eq.(109) can be solved using the Runge–Kutta method (function ode45 in Matlab). If this is not the case, Eq.(109) can be solved using the Newmark–Beta method.
For validation of the IHB solution, the Newmark–Beta method for nonlinear systems is used and implemented according to the procedure presented in [7, 13].
Rights and permissions
About this article

Cite this article
Nešić, N., Cajić, M., Karličić, D. et al. Nonlinear vibration of a nonlocal functionally graded beam on fractional visco-Pasternak foundation. Nonlinear Dyn 107, 2003–2026 (2022). https://doi.org/10.1007/s11071-021-07081-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-07081-z