
Abstract
The compass-gait biped robot is a two-DoF legged mechanical system that has been known by its passive dynamic walking. This kind of passive biped robot is modeled by an impulsive hybrid nonlinear system that exhibits complex behaviors. This paper is concerned with the stabilization of the passive dynamic walking of the compass-gait biped robot by designing an analytical expression of the controlled Poincaré map. The suggested analytical method starts with the time-piecewise linearization of the impulsive system augmented with the controller, around a desired one-periodic passive hybrid limit cycle. By virtue of the first-order Taylor series, we design an explicit expression of the controlled Poincaré map. We present also a simplified expression of the controlled Poincaré map having a reduced dimension. In order to accomplish our goal concerned with the stabilization of the passive walking dynamics of the compass-gait biped robot, we develop first the linearized Poincaré map around the period-1 fixed point of the Poincaré map and we adopt a state-feedback control law to stabilize it. Furthermore, in order to enhance the effectiveness and robustness of the stabilization process, we adopt an LMI-based optimization approach by considering the controlled Poincaré map to design the feedback gain. In the end of this work, we provide some numerical and graphical simulation results, to show the validity of the designed control law by means of the controlled Poincaré map in the stabilization of the passive dynamic walking of the compass-gait biped robot.











Similar content being viewed by others


References
Goswami, A., Vadakkepat, P.: Humanoid Robotics: A Reference, 1st edn. Springer, Amsterdam (2019)
Westervelt, E.R., Grizzle, J.W., Chevallereau, C., Choi, J.-H., Morris, B.: Feedback Control of Dynamic Bipedal Robot Locomotion. Taylor & Francis/CRC, London (2007)
Grizzle, J.W., Chevallereau, C., Sinnet, R.W., Ames, A.D.: Models, feedback control, and open problems of 3d bipedal robotic walking. Automatica 50(8), 1955–1988 (2014)
Al-Shuka, H.F.N., Rahman, M.H., Leonhardt, S., Ciobanu, I., Berteanu, M.: Biomechanics, actuation, and multi-level control strategies of power-augmentation lower extremity exoskeletons: an overview. Int. J. Dyn. Control 7(4), 1462–1488 (2019)
Kuo, A.D.: The six determinants of gait and the inverted pendulum analogy: a dynamic walking perspective. Hum. Mov. Sci. 26(4), 617–656 (2007)
Gupta, S., Kumar, A.: A brief review of dynamics and control of underactuated biped robots. Adv. Robot. 31(12), 607–623 (2017)
Iqbal, S., Zang, X.Z., Zhu, Y.H., Zhao, J.: Bifurcations and chaos in passive dynamic walking: a review. Robot. Auton. Syst. 62(6), 889–909 (2014)
Hoffmann, M., Simanek, J.: The merits of passive compliant joints in legged locomotion: Fast learning, superior energy efficiency and versatile sensing in a quadruped robot. J. Bionic Eng. 14(1), 1–14 (2017)
McGeer, T.: Passive dynamic walking. Int. J. Robot. Res. 9(2), 62–68 (1990)
Garcia, M., Chatterjee, A., Ruina, A., Coleman, M.: The simplest walking model: stability, complexity, and scaling. J. Biomech. Eng. 120(2), 281–288 (1998)
Goswami, A., Thuilot, B., Espiau, B.: Study of the passive gait of a compass-like biped robot: symmetry and chaos. Int. J. Robot. Res. 17, 1282–1301 (1998)
Garcia, M., Chatterjee, A., Ruina, A.: Efficiency, speed, and scaling of two-dimensional passive-dynamic walking. Dyn. Stab. Syst. 15(2), 75–99 (2000)
Das, S.L., Chatterjee, A.: An alternative stability analysis technique for the simplest walker. Nonlinear Dyn. 28(3), 273–284 (2002)
Collins, S., Ruina, A., Tedrake, R., Wisse, M.: Efficient bipedal robots based on passive-dynamic walkers. Science 307(5712), 1082–1085 (2005)
Byl, K., Tedrake, R.: Metastable walking machines. Int. J. Robot. Res. 28(8), 1040–1064 (2009)
Wisse, M., Feliksdal, G., Frankenhuyzen, J.V., Moyer, B.: Passive-based walking robot. IEEE Robot. Autom. Mag. 14(2), 52–62 (2007)
Koop, D., Wu, C.Q.: Passive dynamic biped walking—part I: development and validation of an advanced model. J. Comput. Nonlinear Dyn. 8, 041007 (2013)
Koop, D., Wu, C.Q.: Passive dynamic biped walking—part II: stability analysis of the passive dynamic gait. J. Comput. Nonlinear Dyn. 8, 041008 (2013)
Deng, K., Zhao, M., Xu, W.: Passive dynamic walking with a torso coupled via torsional springs. Int. J. Humanoid Robot. 13(4), 1650024 (2017)
Huang, Y., Wang, Q.-N., Gao, Y., Xie, G.-M.: Modeling and analysis of passive dynamic bipedal walking with segmented feet and compliant joints. Acta Mech. Sin. 28(3), 1457–1465 (2012)
Renjewski, D., Spröwitz, A., Peekema, A., Jones, M., Hurst, J.: Exciting engineered passive dynamics in a bipedal robot. IEEE Trans. Robot. 31(5), 1244–1251 (2015)
Gritli, H., Belghith, S.: Walking dynamics of the passive compass-gait model under OGY-based control: emergence of bifurcations and chaos. Commun. Nonlinear Sci. Numer. Simul. 47, 308–327 (2017)
Gritli, H., Belghith, S.: Walking dynamics of the passive compass-gait model under OGY-based state-feedback control: analysis of local bifurcations via the hybrid Poincaré map. Chaos Solitons Fractals 98, 72–87 (2017)
Gritli, H., Belghith, S.: Walking dynamics of the passive compass-gait model under OGY-based state-feedback control: rise of the Neimark–Sacker bifurcation. Chaos Solitons Fractals 110, 158–168 (2018)
Safa, A.T., Mohammadi, S., Hajmiri, S.E., Naraghi, M., Alasty, A.: How local slopes stabilize passive bipedal locomotion? Mech. Mach. Theory 100, 63–82 (2016)
Martínez-Castelín, J.N., Villarreal-Cervantes, M.G.: Frontal-sagittal dynamiccoupling in the optimal design of a passive bipedal walker. IEEE Access 7, 427–449 (2019)
Montazeri Moghadam, S., Sadeghi Talarposhti, M., Niaty, A., Towhidkhah, F., Jafari, S.: The simple chaotic model of passive dynamic walking. Nonlinear Dyn. 93(3), 1183–1199 (2018)
Kino, H., Sakata, K., Uemura, M., Mori, N.: Simulation verification for the robustness of passive compass gait with a joint stiffness adjustment. Adv. Robot. 33(21), 1129–1143 (2019)
Gritli, H., Khraeif, N., Belghith, S.: Complex walking behaviours, chaos and bifurcations of a simple passive compass-gait biped model suffering from leg length asymmetry. Int. J. Simul. Process Model. 13(5), 446–462 (2018)
Fathizadeh, M., Mohammadi, H., Taghvaei, S.: A modified passive walking biped model with two feasible switching patterns of motion to resemble multi-pattern human walking. Chaos Solitons Fractals 127, 83–95 (2019)
Makarenkov, O.: Existence and stability of limit cycles in the model of a planar passive biped walking down a slope. Proc. R. Soc. A Math. Phys. Eng. Sci. 476(2233), 20190450 (2020)
Mochon, S., McMahon, T.A.: Ballistic walking. J. Biomech. 13(1), 49–57 (1980)
Mochon, S., McMahon, T.A.: Ballistic walking: an improved model. Math. Biosci. 52(3), 241–260 (1980)
Gritli, H., Belghith, S., Khraeif, N.: Intermittency and interior crisis as route to chaos in dynamic walking of two biped robots. Int. J. Bifurc. Chaos 22(3), 19 (2012)
Gritli, H., Belghith, S., Khraeif, N.: Cyclic-fold bifurcation and boundary crisis in dynamic walking of biped robots. Int. J. Bifurc. Chaos 22(10), 15 (2012)
Li, Q., Yang, X.S.: New walking dynamics in the simplest passive bipedal walking model. Appl. Math. Model. 36(11), 5262–5271 (2012)
Li, Q., Guo, J., Yang, X.S.: New bifurcations in the simplest passive walking model. Chaos Interdiscip. J. Nonlinear Sci. 23, 043110 (2013)
Li, Q., Yang, X.S.: Bifurcation and chaos in the simple passive dynamic walking model with upper body. Chaos Interdiscip. J. Nonlinear Sci. 24, 033114 (2014)
Deng, K., Zhao, M., Xu, W.: Level-ground walking for a bipedal robot with a torso via hip series elastic actuators and its gait bifurcation control. Robot. Auton. Syst. 79, 58–71 (2016)
Safa, A.T., Alasty, A., Naraghi, M.: A different switching surface stabilizing an existing unstable periodic gait: an analysis based on perturbation theory. Nonlinear Dyn. 81(4), 2127–2140 (2015)
Safa, A.T., Naraghi, M.: The role of walking surface in enhancing the stability of the simplest passive dynamic biped. Robotica 33(1), 195–207 (2015)
Moon, J.-S., Lee, S.-M., Bae, J., Youm, Y.: Analysis of period-1 passive limit cycles for flexible walking of a biped with knees and point feet. Robotica 34(11), 2486–24988 (2016)
Nourian Zavareh, M., Nazarimehr, F., Rajagopal, K., Jafari, S.: Hidden attractor in a passive motion model of compass-gait robot. Int. J. Bifurc. Chaos 28(14), 1850171 (2018)
Fathizadeh, M., Taghvaei, S., Mohammadi, H.: Analyzing bifurcation, stability and chaos for a passive walking biped model with a sole foot. Int. J. Bifurc. Chaos 28(9), 1850113 (2018)
Gritli, H., Khraeif, N., Belghith, S.: Period-three route to chaos induced by a cyclic-fold bifurcation in passive dynamic walking of a compass-gait biped robot. Commun. Nonlinear Sci. Numer. Simul. 17(11), 4356–4372 (2012)
Gritli, H., Belghith, S.: Displayed phenomena in the semi-passive torso-driven biped model under OGY-based control method: Birth of a torus bifurcation. Appl. Math. Model. 40(4), 2946–2967 (2016)
Gritli, H., Belghith, S.: Bifurcations and chaos in the semi-passive bipedal dynamic walking model under a modified OGY-based control approach. Nonlinear Dyn. 83(4), 1955–1973 (2016)
Hiskens, I.A., Pai, M.A.: Trajectory sensitivity analysis of hybrid systems. IEEE Trans. Circuits Syst. I(47), 204–220 (2000)
Gritli, H., Belghith, S.: Identification, Stability and Stabilization of Limit Cycles in a Compass-Gait Biped Model via a Hybrid Poincaré Map, Springer International Publishing, Cham, pp. 259–289 (2016)
Deng, K., Zhao, M., Xu, W.: Bifurcation gait suppression of a bipedal walking robot with a torso based on model predictive control. Robot. Auton. Syst. 89, 27–39 (2017)
Huang, Y., Huang, Q., Wang, Q.: Chaos and bifurcation control of torque-stiffness-controlled dynamic bipedal walking. IEEE Trans. Syst. Man Cybern. Syst. 47(7), 1229–1240 (2017). https://doi.org/10.1109/TSMC.2016.2569474
Taghvaei, S., Vatankhah, R.: Detection of unstable periodic orbits and chaos control in a passive biped model. Iran. J. Sci. Technol. Trans. Mech. Eng. 40(4), 303–313 (2016)
Yan, G., Tang, C., Lin, Z., Malloci, I.: Feedback control for compass-like biped robot with underactuated ankles using transverse coordinate transformation. Robotica 33(3), 563–577 (2015)
Wang, Z., Yan, G., Tang, C., Lin, Z., Miao, Y.: Coupling mechanical design and control design for energy-efficient and stable walking of a compass-like biped. Trans. Inst. Meas. Control 38(3), 253–265 (2016)
Tang, C., Yan, G., Lin, Z., Wang, Z., Yi, Y.: Stable walking of 3d compass-like biped robot with underactuated ankles using discrete transverse linearization. Trans. Inst. Meas. Control 37(9), 1074–1083 (2015)
Moon, J.-S., Stipanović, D.M., Spong, M.W.: Gait generation and stabilization for nearly passive dynamic walking using auto-distributed impulses. Asian J. Control 18(4), 1343–1358 (2016)
Liu, C., Yang, J., An, K., Liu, M., Chen, Q.: Robust control of semi-passive biped dynamic locomotion based on a discrete control lyapunov function. Robotica 38(8), 1345–1358 (2020). https://doi.org/10.1017/S0263574719001504
Gritli, H., Khraeif, N., Belghith, S.: Chaos control in passive walking dynamics of a compass-gait model. Commun. Nonlinear Sci. Numer. Simul. 18(8), 2048–2065 (2013)
Gritli, H., Belghith, S., Khraeif, N.: OGY-based control of chaos in semi-passive dynamic walking of a torso-driven biped robot. Nonlinear Dyn. 79(2), 1363–1384 (2015)
Gritli, H., Belghith, S.: Computation of the Lyapunov exponents in the compass-gait model under OGY control via a hybrid Poincaré map, Chaos Solitons Fractals 81. Part A, pp. 172–183 (2015)
Benmiloud, M., Benalia, A., Djemai, M., Defoort, M.: Hybrid control design for limit cycle stabilisation of planar switched systems. Int. J. Control 91(7), 1720–1729 (2018)
Benmiloud, M., Benalia, A., Djemai, M., Defoort, M.: On the local stabilization of hybrid limit cycles in switched affine systems. IEEE Trans. Autom. Control 64(2), 841–846 (2019)
Znegui, W., Gritli, H., Belghith, S.: An explicit analytical expression of the Poincaré map for analyzing passive dynamic walking of the compass-gait biped model. In: 2019 International Conference on Advanced Systems and Emergent Technologies (IC\_ASET), pp. 388–394 (2019)
Znegui, W., Gritli, H., Belghith, S.: Design of an explicit expression of the Poincaré map for the passive dynamic walking of the compass-gait biped model. Chaos Solitons Fractals 130, 109436 (2020)
Gritli, H., Khraeif, N., Belghith, S.: Handbook of Research on Advanced Intelligent Control Engineering and Automation, Advances in Computational Intelligence and Robotics (ACIR), IGI Global, USA, 2015, Ch. Further investigation of the period-three route to chaos in the passive compass-gait biped model, pp. 279–300
Obayashi, I., Aoi, S., Tsuchiya, K., Kokubu, H.: Formation mechanism of a basin of attraction for passive dynamic walking induced by intrinsic hyperbolicity. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 472(2190), 1–19 (2016)
An, K., Fang, Z., Li, Y., Chen, Q.: Internal features in basin of attraction of the simplest walking model. J. Mech. Sci. Technol. 29(11), 4913–4921 (2015)
Obayashi, I., Aoi, S., Tsuchiya, K., Kokubu, H.: Common formation mechanism of basin of attraction for bipedal walking models by saddle hyperbolicity and hybrid dynamics. Jpn. J. Ind. Appl. Math. 32(2), 315–332 (2015)
Sidorov, E., Zacksenhouse, M.: Lyapunov based estimation of the basin of attraction of Poincare maps with applications to limit cycle walking. Nonlinear Anal. Hybrid Syst. 33, 179–194 (2019)
Wang, Y., Cao, H., Jiang, J.: An improved method for estimating the domain of attraction of passive biped walker. Discrete Dyn. Nat. Soc. 2019, 11 (2019)
Moon, J.-S., Spong, M.: Classification of periodic and chaotic passive limit cycles for a compass-gait biped with gait asymmetries. Robotica 29(7), 967–974 (2011)
Hu, Y., Yan, G., Lin, Z.: Gait generation and control for biped robots with underactuation degree one. Automatica 47(8), 1605–1616 (2011)
La Hera, P.X.M., Shiriaev, A.S., Freidovich, L.B., Mettin, U., Gusev, S.V.: Stable walking gaits for a three-link planar biped robot with one actuator. IEEE Trans. Robot. 29(3), 589–601 (2013)
Manchester, I.R., Mettin, U., Iida, F., Tedrake, R.: Stable dynamic walking over rough terrain: Theory and experiment. In: Proceedings of the International Symposium on Robotics Research, pp. 1–16 (2009)
Iida, F., Tedrake, R.: Minimalistic control of biped walking in rough terrain. Auton. Robots 28(3), 355–368 (2010)
Asano, F., Luo, Z.-W.: Efficient dynamic bipedal walking using effects of semicircular feet. Robotica 29(3), 351–365 (2011)
Asano, F., Luo, Z.W., Yamakita, M.: Biped gait generation and control based on a unified property of passive dynamic walking. IEEE Trans. Robot. 21(4), 754–762 (2005)
Doosti, P., Mahjoob, M.J., Dadashzadeh, B.: Finite-time control strategy for the running of a telescopic leg biped robot. J. Braz. Soc. Mech. Sci. Eng. 41(4), 196 (2019)
Asano, F., Luo, Z.-W.: Energy-efficient and high-speed dynamic biped locomotion based on principle of parametric excitation. IEEE Trans. Robot. 24(6), 1289–1301 (2008)
Hayashia, T., Kanekob, K., Asanoc, F., Luoa, Z.-W.: Experimental study of dynamic bipedal walking based on the principle of parametric excitation with counterweights. Adv. Robot. 25(1–2), 273–287 (2011)
Gritli, H.: Poincaré maps design for the stabilization of limit cycles in non-autonomous nonlinear systems via time-piecewise-constant feedback controllers with application to the chaotic Duffing oscillator. Chaos Solitons Fractals 127, 127–145 (2019)
Gritli, H.: Robust master-slave synchronization of chaos in a one-sided 1-DoF impact mechanical oscillator subject to parametric uncertainties and disturbances. Mech. Mach. Theory 142, 103610 (2019)
Gritli, H., Belghith, S.: Robust feedback control of the underactuated inertia wheel inverted pendulum under parametric uncertainties and subject to external disturbances LMI formulation. J. Frankl. Inst. 355(18), 9150–9191 (2018)
Gritli, H., Belghith, S.: Diversity in the nonlinear dynamic behavior of a one-degree-of-freedom impact mechanical oscillator under OGY-based state-feedback control law: order, chaos and exhibition of the border-collision bifurcation. Mech. Mach. Theory 124, 1–41 (2018)
Piiroinen, P.T., Virgin, L.N., Champneys, A.R.: Chaos and period-adding: experimental and numerical verification of the grazing bifurcation. J. Nonlinear Sci. 14(4), 383–404 (2004)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A
Appendix A
The PDW of the compass-gait biped robot consists of a continuous dynamics modeling the motion during the swing phase and an algebraic/discrete equation describing the instantaneous transition in the state vector during the impact phase [64].
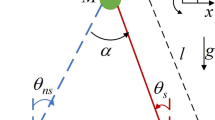
Let us consider the vector \(\varvec{\theta }=\left[ \begin{array}{cc} \theta _{ns}&\,\theta _{s} \end{array} \right] ^T\) of generalized coordinates of the compass-gait biped robot. Then, the swing motion is defined by the following dynamics:
where \(\varvec{{\mathcal {J}}}\) is the inertia matrix, \(\varvec{{\mathcal {H}}}\) includes Coriolis and centrifugal terms, \(\varvec{{\mathcal {G}}}\) is the gravitational matrix/vector and \(\varvec{{\mathcal {B}}}\) is the input matrix. These matrices are defined as follows:
\({\varvec{{\mathcal {J}}}}(\varvec{\theta }) = \left[ \begin{array}{cc} mb^2 &{} -mlb\cos (\theta _{s}-\theta _{ns})\\ -mlb\cos (\theta _{s}-\theta _{ns}) \,\,\,\,\, &{} m_{H}l^2+m(l^2+a^2) \end{array} \right] \),
\(\varvec{{{\mathcal {H}}}}(\varvec{\theta },\varvec{{\dot{\theta }}}) = \left[ \begin{array}{c} mlb{\dot{\theta }}_{s}^2\sin (\theta _{s}-\theta _{ns})\\ -mlb{\dot{\theta }}_{ns}^2\sin (\theta _{s}-\theta _{ns}) \end{array} \right] \),
\(\varvec{{{\mathcal {G}}}}(\varvec{\theta }) = g\left[ \begin{array}{c} mbsin(\theta _{ns})\\ -(m_{H}l+m(a+l))\sin (\theta _{s}) \end{array} \right] \) and \(\varvec{{{\mathcal {B}}}} = \left[ \begin{array}{c} -1\\ 1 \end{array} \right] \).
While descending the inclined walking surface of slope \(\varphi \), the swing leg of the compass-gait biped robot is above the ground. Such situation is reformulated by the following set:
In addition, the impact phase happens if and only if the following conditions hold:
-
1.
the swing leg reaches the walking surface,
-
2.
the swing leg is moving downward,
-
3.
the swing leg is in front of the stance leg.
These three impact conditions are recast by the following set:
At the impact phase, and then when the swing leg of the compass-gait biped robot encounters the walking surface, the vector of angular positions \(\varvec{\theta }\) and the vector of angular velocities \(\dot{\varvec{\theta }}\) undergo an instantaneous transition with respect to the two following algebraic expressions:
where in (A-4), superscribes \(^{+}\) and \(^{-}\) denote, respectively, just after and just before the impact phase. The two matrices \(\varvec{{{\mathcal {R}}}_{e}}\) and \(\varvec{{{\mathcal {S}}}_{e}}\left( \varvec{\theta }^{-}\right) \) are expressed as follows: \(\varvec{{{\mathcal {R}}}_{e}} {=} \left[ \begin{array}{cc} 0 &{}\ \ 1\\ 1 &{}\ \ 0 \end{array} \right] \), \(\varvec{{{\mathcal {S}}}_{e}}\left( \varvec{\theta }^{-}\right) {=} {\varvec{Q}}_{p}^{-1}(\alpha )\,{\varvec{Q}}_{m}(\alpha )\), with
\({\varvec{Q}}_{m}(\alpha ) {=} \left[ \begin{array}{cc} -mab \,\,\,\,\,&{} -mab{+}(m_{H}l^2{+}2mal)\cos (2\alpha )\\ 0 &{} -mab \end{array} \right] \),
\({\varvec{Q}}_{p}(\alpha ) {=} \left[ \begin{array}{cc} mb(b-l\cos (2\alpha )) \,\,\,\,\, &{} \begin{array}{c}ml(l-b\cos (2\alpha ))+\\ ma^2{+}m_{H}l^2\end{array} \\ mb^2 &{} -mbl\cos (2\alpha ) \end{array} \right] \) Recall that \(\alpha \) is the half-interleg angle and is given as \(\alpha =\frac{1}{2}(\theta _{s}-\theta _{ns})\).
Hence, the continuous dynamics (A-1) and its constraint (A-2) and the algebraic equations in (A-4) and the set of impact conditions in (A-3) define the IHNLD of the compass-gait biped robot. It can be rewritten under the state representation in (1), where \({\varvec{f}}({\varvec{x}})=\left[ \begin{array}{c} \dot{\varvec{\theta }} \\ -\varvec{{{\mathcal {J}}}}(\varvec{\theta })^{-1}\left( \varvec{{{\mathcal {H}}}}(\varvec{\theta },\dot{\varvec{\theta }})+\varvec{{{\mathcal {G}}}}(\varvec{\theta })\right) \end{array} \right] \), \({\varvec{g}}({\varvec{x}})=\left[ \begin{array}{c} \varvec{{\mathcal {O}}}_{2 \times 1} \\ \varvec{{{\mathcal {J}}}}(\varvec{\theta })^{-1}\varvec{{{\mathcal {B}}}} \end{array} \right] \), \({{\varvec{h}}}\left( {\varvec{x}}\right) =\left[ \begin{array}{cc} \varvec{{{\mathcal {R}}}}_{e} &{}\, \varvec{{\mathcal {O}}}_{2\times 2}\\ \varvec{{\mathcal {O}}}_{2\times 2} &{}\, \varvec{{{\mathcal {S}}}}_{e}\left( \varvec{\theta }^{-}\right) \end{array} \right] {\varvec{x}}\), with \(\varvec{{\mathcal {O}}}\) the zero matrix.
Rights and permissions
About this article

Cite this article
Znegui, W., Gritli, H. & Belghith, S. Stabilization of the passive walking dynamics of the compass-gait biped robot by developing the analytical expression of the controlled Poincaré map. Nonlinear Dyn 101, 1061–1091 (2020). https://doi.org/10.1007/s11071-020-05851-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-020-05851-9