
Abstract
This paper presents a new mathematical model of 4 degrees of freedom of links to qualitatively describe the dynamic behavior of the front structure of an excavator. In the model, the effects of couple of forces as new additional effects are involved. The exact forms and solutions for position-varying moments of inertia used in this model are presented. A topologic structure is used for the kinematic analysis of the body frame. The numerical results show that the new additional effects can change the angular kinetic energy of all links to a significant degree when the upper structure swings. The results suggest that the new additional effects should be taken into account for analysis of excavator dynamics.










Similar content being viewed by others

Abbreviations
- \(\theta _0 \) :
-
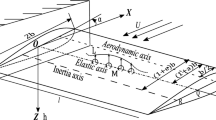
The angular displacement of the upper structure and is measured from the straight-ahead position by counterclockwise direction
- \(\theta _1 \) :
-
The angular displacement of the center of mass of the boom and is measured from the vertical direction
- \(\theta _2 \) :
-
The angular displacement of the center of mass of the stick and is measured from the vertical direction
- \(\theta _3 \) :
-
The angular displacement of the center of mass of the bucket and is measured from the vertical direction
- \(m_1 \) :
-
The mass of the boom
- \(m_2 \) :
-
The mass of the stick
- \(m_3 \) :
-
The mass of the bucket
- \(\rho ( {x,y,z} )\) :
-
The mass density at the point of (x, y, z)
- \(J_{C1X} \) :
-
The moment of inertia of the rigid body boom about the X axis through the center of mass
- \(J_{C1Y} \) :
-
The moment of inertia of the rigid body boom about the Y axis through the center of mass
- \(J_{C1Z} \) :
-
The moment of inertia of the rigid body boom about the Z axis through the center of mass
- \(J_{C2X} \) :
-
The moment of inertia of the rigid body stick about the X axis through the center of mass
- \(J_{C2Y} \) :
-
The moment of inertia of the rigid body stick about the Y axis through the center of mass
- \(J_{C2Z} \) :
-
The moment of inertia of the rigid body stick about the Z axis through the center of mass
- \(J_{C3X} \) :
-
The moment of inertia of the rigid body bucket about the X axis through the center of mass
- \(J_{C3Y} \) :
-
The moment of inertia of the rigid body bucket about the Y axis through the center of mass
- \(J_{C3Z} \) :
-
The moment of inertia of the rigid body bucket about the Z axis through the center of mass
- \(\omega _{C1X} \) :
-
The angular velocity of the rigid body boom relative to the X axis through the center of mass
- \(\omega _{C1Y} \) :
-
The angular velocity of the rigid body boom relative to the Y axis through the center of mass
- \(\omega _{C1Z} \) :
-
The angular velocity of the rigid body boom relative to the Z axis through the center of mass
- \(\omega _{C2X} \) :
-
The angular velocity of the rigid body stick relative to the X axis through the center of mass
- \(\omega _{C2Y} \) :
-
The angular velocity of the rigid body stick relative to the Y axis through the center of mass
- \(\omega _{C2Z} \) :
-
The angular velocity of the rigid body stick relative to the Z axis through the center of mass
- \(\omega _{C3X} \) :
-
The angular velocity of the rigid body bucket relative to the X axis through the center of mass
- \(\omega _{C3Y} \) :
-
The angular velocity of the rigid body bucket relative to the Y axis through the center of mass
- \(\omega _{C3Z} \) :
-
The angular velocity of the rigid body bucket relative to the Z axis through the center of mass
- \(T_\mathrm{boom} \) :
-
The kinetic energy of the boom
- \(T_\mathrm{stick} \) :
-
The kinetic energy of the stick
- \(T_\mathrm{bucket} \) :
-
The kinetic energy of the bucket
- \(V_\mathrm{boom} \) :
-
The potential energy of the boom
- \(V_\mathrm{stick} \) :
-
The potential energy of the stick
- \(V_\mathrm{bucket} \) :
-
The potential energy of the bucket
- \(F_1 \) :
-
The piston force of the boom cylinder
- \(F_2 \) :
-
The piston force of the stick cylinder
- \(F_3 \) :
-
The piston force of the bucket cylinder
- \(F_N \) :
-
The force of the connecting rod between Q and N
- \(F_P \) :
-
The force of the connecting rod between Q and P
- \(\tau _0 \) :
-
Torque acting on the front structure from the upper structure
- \(\tau _1 \) :
-
Torque acting on the boom from the piston force \(F_{1}\) of the boom cylinder and the piston force \(F_{2}\) of the stick cylinder
- \(\tau _2 \) :
-
Torque acting on the stick from the piston force \(F_{2}\) of the stick cylinder, the piston force \(F_{3}\) of the stick cylinder and the force \(F_{N}\) of the connecting rod between Q and N
- \(\tau _3 \) :
-
Torque acting on the bucket from the force \(F_{P}\) of the connecting rod between Q and P
- g:
-
the acceleration due to gravity toward the surface of the earth
References
Koivo, A.J.: Kinematics of excavators (backhoes) for transferring surface material. J. Aerosp. Eng. 7(1), 17–32 (1994)
Foulon, G., Fourquet, J., Renaud, M.: Coordinating mobility and manipulation using nonholonomic mobile manipulators. Control Eng. Pract. 7(3), 391–399 (1999)
Frimpong, S., Li, Y.: Virtual prototype simulation of hydraulic shovel kinematics for spatial characterization in surface mining operations. Int. J. Surf. Min. Reclam. Environ. 19(4), 238–250 (2005)
Frimpong, S., Hu, Y., Inyang, H.: Dynamic modeling of hydraulic shovel excavators for geomaterials. Int. J. Geomech. 8(1), 20–29 (2008)
Zweiri, Y.H., Seneviratne, L.D., Althoefer, K.: Model-based automation for heavy duty mobile excavator. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, vol. 3, pp. 2967–2972. IEEE (2002)
Zhong, G., et al.: Optimal control of the dynamic stability for robotic vehicles in rough terrain. Nonlinear Dyn. 73(1–2), 981–992 (2013)
Beji, L., Pascal, M.: The kinematics and the full minimal dynamic model of a 6-DOF parallel robot manipulator. Nonlinear Dyn. 18(4), 339–356 (1999)
Broersen, P.M.: Automatic spectral analysis with time series models. IEEE Trans. Instrum. Meas. 51(2), 211–216 (2002)
Šalinić, S., Bošković, G., Nikolić, M.: Dynamic modelling of hydraulic excavator motion using Kane’s equations. Autom. Constr. 44, 56–62 (2014)
Lesser, M.: A geometrical interpretation of Kane’s equations. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 436(1896), 69–87 (1992)
Towarek, Z.: Dynamics of a single-bucket excavator on a deformable soil foundation during the digging of ground. Int. J. Mech. Sci. 45(6), 1053–1076 (2003)
Gottvald, J.: The calculation and measurement of the natural frequencies of the bucket wheel excavator SchRs 1320/4x30. Transport 5(3), 269–277 (2010)
Rusiński, E., Harnatkiewicz, P., Kowalczyk, M., Moczko, P.: Examination of the causes of a bucket wheel fracture in a bucket wheel excavator. Eng. Fail. Anal. 17(6), 1300–1312 (2010)
Savković, M., Gašić, M., Petrović, D., Zdravković, N., Pljakić, R.: Analysis of the drive shaft fracture of the bucket wheel excavator. Eng. Fail. Anal. 20, 105–117 (2012)
Acknowledgements
We are grateful to the reviewers and the editors for their constructive suggestions. This research is supported by the Research Project of State Key Laboratory of Mechanical System and Vibration (Granted No. MSVZD201401), and sponsored by Qing Lan Project and Science and Technology Innovation Fun of Nanjing Institute of Technology (Granted No. CKJB201408).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
The constraint equations for the angles between the force vectors and the lever arm vector are given by,
Rights and permissions
About this article

Cite this article
Cao, Y., Xie, Y. Dynamic modeling of the front structure of an excavator. Nonlinear Dyn 91, 233–247 (2018). https://doi.org/10.1007/s11071-017-3865-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3865-7