
Abstract
Robust tracking control of electrically flexible-joint robots is addressed in this paper. Two important practical situations are considered. The fact that robot actuators have limited voltage and that current measurement is subjected to noise. Let us notice that a few solutions for the voltage-bounded robust tracking control have been proposed. In this paper, we contribute to this subject by presenting a new form of voltage-based control strategy. It proves that the closed loop system is BIBO stable, while actuator/link position errors are uniformly–ultimately bounded stable in agreement with Lyapunov’s direct method in any finite region of the state space. As a second contribution of this paper, we present a robust adaptive control scheme without the need for computation of regressor matrix and current measurement, with the same result on the closed loop system stability. This novelty gives a simple robust tracking control scheme for both structured and unstructured uncertainties based on the function approximation technique. The analytical studies as well as experimental results produced using MATLAB/Simulink external mode control on a flexible-joint electrically driven robot demonstrate high performance of the proposed control scheme.











Similar content being viewed by others

References
Tomei, P.: A simple PD controller for robots with elastic joints. IEEE Trans. Autom. Control 36, 1208–1213 (1991)
Luca, A.D., Isidori, A., Nicolo, F.: Control of robot arm with elastic joints via nonlinear dynamic feedback. In: The 24th Conference on Decision Control, pp. 1671–1679. Ft. Lauderdale (1985)
Spong, M.W., Khorasani, K., Kokotovic, P.V.: An integral manifold approach to the feedback control of flexible joint robots. IEEE J. Robot. Autom. 3, 291–300 (1987)
Izadbakhsh, A., Masoumi, M.: FAT-based robust adaptive control of flexible-joint robots: singular perturbation approach. In: Annual IEEE Industrial Society’s 18th International Conference on Industrial Technology, pp. 803–808. Toronto, ON (2017)
Spong, M.W.: Modeling and control of elastic joint robots. ASME J. Dyn. Syst. Meas. Control. 109, 310–319 (1987)
Spurgeon, S.K., Yao, L., Lu, X.Y.: Robust tracking via sliding mode control for elastic joint manipulators. Proc. Inst. Mech. Eng. 215, 405–417 (2001)
Chen, C.-S.: Robust self-organizing neural-fuzzy control with uncertainty observer for MIMO nonlinear systems. IEEE Trans. Fuzzy Syst. 19, 694–706 (2011)
Ghorbel, F., Hung, J.Y., Spong, M.W.: Adaptive control of flexible joint manipulators. IEEE Control Syst. Mag. 9, 9–13 (1989)
Lee. J., Yeon. J. S., Park. J. H., and Lee. S.: Robust back-stepping control for flexible-joint robot manipulators. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 183–188 (2007)
Talole, E., Kolhe, P., Phadke, B.: Extended state observer based control of flexible joint system with experimental validation. IEEE Trans. Ind. Electron. 57, 1411–1419 (2010)
Chaoui. H., Sicard. P., and Gueaieb. W.: ANN-based adaptive control of robotic manipulators with friction and joint elasticity. IEEE Trans. Ind. Electron. 56, 3174–3187 (2009)
Wang, D.: A simple iterative learning controller for manipulators with flexible joints. Automatica 31, 1341–1344 (1995)
Izadbakhsh, A., Akbarzadeh Kalat, A., Fateh, M.M., Rafiei, S.M.R.: A robust anti-windup control design for electrically driven robots—theory and experiment. Int. J. Control Autom. Syst. 9, 1005–1012 (2011)
Izadbakhsh, A., Fateh, M.M.: Real-time robust adaptive control of robots subjected to actuator voltage constraint. Nonlinear Dyn. 78, 1999–2014 (2014)
Izadbakhsh, A., Fateh, M.M.: Robust Lyapunov-based control of flexible-joint robots using voltage control strategy. Arabian J. Sci. Eng. 39, 3111–3121 (2014). doi:10.1007/s13369-014-0949-2
Fateh, M.M.: Nonlinear control of electrical flexible-joint robots. Nonlinear Dyn. 67, 2549–2559 (2012)
Qu, Z., Dawson, D.M.: Robust Tracking Control of Robot Manipulators. IEEE Press, Inc., New York (1996)
Izadbakhsh, A.: Robust control design for rigid-link flexible-joint electrically driven robot subjected to constraint: theory and experimental verification. Nonlinear Dyn. 85, 751–765 (2016)
Fateh M. M.: Proper uncertainty bound parameter to robust control of electrical manipulators using nominal model. Nonlinear Dyn. 61, 655–666 (2010)
Mcinroy, J.E., Saridis, G.N.: Acceleration and torque feedback for robotic control: experimental results. J. Robot. Syst. 7, 813–832 (1990)
Spong, M.W., Hutchinson, S., Vidyasagar, M.: Robot Modelling and Control. Wiley, New York (2006)
Tsuji, T., Kobayashi, H.: Robust acceleration control based on acceleration measurement using optical encoder. In: IEEE International Symposium on Industrial Electronics, pp. 3108–3113 (2007)
Tsuji, T., Mizuochi, M., Nishi, H., Ohnishi, K.: A velocity measurement method for acceleration control. In: Proceedings of International Conference on Industrial Electronics, Control and Instrumentation, pp. 1943–1948 (2005)
Merry, R.J.E., van de Molengraft, M.J.G., Steinbuch, M.: Velocity and acceleration estimation for optical incremental encoders. Mechatronics 20, 20–26 (2010)
Moreno-Valenzuela, J., Campa, R., Santibáñez, V.: Model-based control of a class of voltage-driven robot manipulators with non-passive dynamics. Comput. Electr. Eng. 39, 2086–2099 (2013)
Shang, Y.: Average consensus in multi-agent systems with uncertain topologies and multiple time-varying delays. Linear Algebra Appl. 459, 411–429 (2014)
Shang, Y.: Consensus seeking over Markovian switching networks with time-varying delays and uncertain topologies. Appl. Math. Comput. 273, 1234–1245 (2016)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Research involving human participants and/or animals
Authors declare that there has been no human participant or animal in this research.
Informed consent
Authors declare that there is no need for informed consent for this paper, since the results have been obtained using computer simulations.
Appendices
Appendix 1
Proof is as same as those defined by Fateh [16]. Pre-multiplying both sides of (3) by \(I_\mathrm{a}^T \), one obtains the following power equation
or equivalently
where j and jj indices denote the jth elements of a vector and a diagonal matrix, respectively. Equation (74) can be translated as follows. Actuators receive the electrical power expressed by \(I_\mathrm{a}^\mathrm{T} v(t)\) to provide the mechanical power stated as \(I_\mathrm{a}^\mathrm{T} K_{\mathrm{b}} \dot{\theta }_{\mathrm{m}} \) in (74). The power \(\mathop \sum \nolimits _{j=1}^n {R_{\textit{ajj}} I_{aj}^2 }\) is the loss in the windings, and the power \(\mathop \sum \nolimits _{j=1}^n {L_{\textit{ajj}} I_{aj} \dot{I}_{aj} } \) is the time derivative of the magnetic energy. From (74), we can write for \(t\ge 0\)
With \(I_{aj} (0)=0\), for \(j=1,2,\ldots ,n\), (75) is
Since \(\mathop \sum \nolimits _{j=1}^n {R_{\textit{ajj}} I_{aj}^2 t} \ge 0\) and \(\mathop \sum \nolimits _{j=1}^n{L_{\textit{ajj}} I_{aj}^2 } \ge 0\)
The upper bound of mechanical energy is given by
Hence, at the upper bound of mechanical energy
Therefore, \(\dot{\theta }_{\mathrm{m}} \) is limited as
From Remark 1, Assumptions 1 and 2, we have
where \(\xi _{\dot{\theta }_{\mathrm{m}} } \) is the maximum value of motor joint velocity vector. From (3), we can write
where
is bounded, whereas \(v(t),\,\dot{\theta }_{\mathrm{m}} \), and \(\varphi (t)\) are bounded as stated by Remark 1, (81), and Assumption 2, respectively. Consequently, the input \(\omega \) in (82) is bounded. The linear differential equation (82) is stable linear system based on the Routh–Hurwitz criterion. Since the input \(\omega \) is bounded, the output \(I_\mathrm{a} \) is bounded as \(\xi _{I_\mathrm{a} } \). From (82), we can write
Since \(\omega \) and \(I_\mathrm{a} \) are bounded, then \(\dot{I}_\mathrm{a} \) is bounded as \(\xi _{\dot{I}_\mathrm{a} } \).
Appendix 2
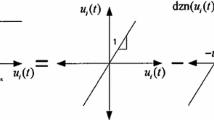
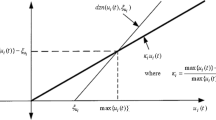
Proof is as same as [18]. Suppose that \(u_i (t)\) is the ith value of u(t) vector. If \(u_i (t)\) exist within \([-\mathrm{max} \{u_i (t)\},\mathrm{max} \{u_i (t)\}]\) and \(\delta _i\) becomes \(\frac{\mathrm{max} \{u_i (t)\}-u_{i_{\mathrm{max} } } }{\mathrm{max} \{u_i (t)\}},\left| {\mathrm{d}zn(u_i (t),u_{i_{\mathrm{max} } } )} \right| \le \delta _i \left| {u_i (t)} \right| \) is satisfied by Fig. 12. From Fig. 12, \(\mathrm{d}zn(u(t),u_{\mathrm{max} } )\) is bounded as the following inequality:
where
According to (14), the magnitude of the control input is bounded as follows:
Thus, from Eqs. (85) and (87), \(\left\| {\mathrm{d}zn(\cdot )} \right\| \) is satisfied with the following condition:

Linear bound of dead-zone function
Appendix 3
Considering to (16) we have
Now, assume that \(\left\| {L_\mathrm{a} \dot{I}_\mathrm{a} (t)+\hat{{K}}_{\mathrm{b}} \dot{\theta }_{\mathrm{m}} -\tilde{p}^{\mathrm{T}}y+\varphi (t)} \right\| \le \rho \), where \(\rho >0\) is a known scalar defined by the use of Lemma 1, and Assumptions 1 and 2. Thus:
This completes the proof. \(\square \)
Appendix 4
Proof is based on Gershgorin theorem and is similar to that in [17] when \(\alpha _1 =\alpha _2 =\mu \). Let T be a transformation such that
where \(\varLambda =\mathrm{diag}\{a_1 ,a_2 ,\ldots ,a_{\mathrm{n}} \}\) and the \(a_i \) are the eigenvalues of \(D_i \). It follows that:
where all the sub-matrices on the right-hand side of the previous equation are diagonal. By the Gershgorin theorem, we know that the eigenvalues \(\aleph _j , j=1,{\ldots },3n\), of the matrix on the right-hand side of (91) satisfy the following inequalities
Or equivalently
for \(i=1,{\ldots },n\). The proof of the lemma can be completed by noting that \(\bar{{r}}_{\mathrm{g}} ^{-1}\bar{{k}}^{-1}d_{\mathrm{m}} \le a_i \le \underline{r_{\mathrm{g}} }^{-1}\underline{k}^{-1}d_{\mathrm{M}} , \underline{\lambda }(K_{\mathrm{p}} )\le k_{pi} \le \bar{{\lambda }}(K_{\mathrm{p}} ), \underline{\lambda }(K_{\mathrm{d}} )\le k_{di} \le \bar{{\lambda }}(K_{\mathrm{d}} )\), and \(\underline{\lambda }(K_I )\le k_{Ii} \le \bar{{\lambda }}(K_I )\) for \(i=1,2,\ldots ,n\). It is worthy to mention that similar proof techniques can be found in [26, 27]. \(\square \)
Rights and permissions
About this article

Cite this article
Izadbakhsh, A. A note on the “nonlinear control of electrical flexible-joint robots”. Nonlinear Dyn 89, 2753–2767 (2017). https://doi.org/10.1007/s11071-017-3623-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3623-x