
Abstract
The subject of consideration is a gyroscope mounted in the gimbal (Cardan) suspension and placed on the immovable foundation in the field of gravity. Dissipative and control torques on the axes of gimbals are supposed to be absent, but the fast rotating rotor is under the action of the frictional torque, and so the device is supplied with the asynchronous electric motor that forms a driving torque acting about the axis of rotation of the rotor in the inner gimbal. The inner gimbal serves as the stator of the motor. This device has a family of steady motions, which are steady precessions of the rotor about the outer gimbal axis and steady rotations of the rotor about its axis of rotation in the inner gimbal. In the paper, the global attraction property is proved for the set of steady motions. This means that every motion of the device tends to one of its steady motions as time tends to infinity. Outcomes of numerical simulation are presented to give a demonstration of this property.



Similar content being viewed by others

References
Nicolai, E.L.: Gimbal Mounted Gyroscope, 2nd edn. Nauka, Moscow (1964). [in Russian]
Klimov, D.M., Kharlamov, S.A.: Dynamics of a Gimbal Mounted Gyroscope. Nauka, Moscow (1978). [in Russian]
Magnus, K.: Kreisel: Theorie und Anwendungen. Springer, Berlin, Heidelberg, New York (1971)
Ishlinskii, A.Yu.: Orientation, Gyroscopes, Inertial Navigation. Nauka, Moscow (1976). [in Russian]
Agafonov, S.A.: Gimbal suspension gyro: stability, bifurcation, and chaos. J. Dyn. Control Syst. 7(3), 339–351 (2001)
Polo, M.F.P., Molina, M.P.: A generalized mathematical model to analyze the nonlinear behavior of a controlled gyroscope in gimbals. Nonlinear Dyn. 48, 129–152 (2007)
Kharlamov, S.A.: On motion of a gimbal mounted gyroscope at the presence of a moment around the axis of proper rotation. Dokl. Akad. Nauk SSSR 139(2), 83–86 (1961). [in Russian]
Kharlamov, S.A.: Nutational oscillations and drift of a gyroscope mounted in cardan suspension. Dokl. Akad. Nauk SSSR 146(3), 86–90 (1961). [in Russian]
Kharlamov, S.A.: To the theory of an astatic gyroscope with electric drive mounted in Cardan suspension. Izv. Akad. Nauk SSSR. Mekhanika i Mashinostroenie 6, 45–54 (1963). [in Russian]
Krementulo, V.V.: On stability of motion of a gymbal mounted gyroscope in the presence of the moment about the axis of the rotor. Izv. Akad. Nauk SSSR. Mekhanika 3, 156–159 (1965). [in Russian]
Konosevich, B.I.: On stability of steady motions of an asynchronous gyroscope in gimbal mount. Mekhanika Tverdogo Tela 9, 61–73 (1977). [in Russian]
Konosevich, Yu.B: Stability criterion for steady motions of a synchronous gyroscope in gimbal mount. Mekhanika Tverdogo Tela 35, 115–123 (2005). [in Russian]
Konosevich, B.I., Konosevich, Yu.B: Stability of stationary motions of a gimbal gyro with an electric motor. Mech. Solids 48(3), 285–297 (2013)
Konosevich, B.I.: Asymptotic properties of some motions of an asynchronous gyroscope in gimbal mount. Mekhanika Tverdogo Tela 14, 87–92 (1982). [in Russian]
Konosevich, B.I., Konosevich, Yu.B: Asymptotic behavior of perturbed steady motions of a gimbal mounted synchronous gyroscope. Mekhanika Tverdogo Tela 36, 64–74 (2006). [in Russian]
Konosevich, B.I.: Drift velocity of the rotor in the generalized problem on a gimbal mounted gyroscope. Mekhanika Tverdogo Tela 4, 82–92 (1972). [in Russian]
Kharlamov, P.V.: A compound space pendulum. Mekhanika Tverdogo Tela 4, 73–82 (1972). [in Russian]
Konosevich, B.I.: Investigation of the main stability condition of steady motions of a gimbal mounted gyroscope supplied with the electric motor. Mekhanika Tverdogo Tela 33, 80–89 (2003). [in Russian]
Barbashin, E.A., Tabueva, V.A.: Dynamical Systems with Cylindrical Phase Space. Nauka, Moscow (1969). [in Russian]
Barbashin, E.A.: Introduction into Stability Theory. Nauka, Moscow (1967). [in Russian]
LaSalle, J., Lefschetz, S.: Stability by Liapunov’s Direct Method with Applications. Academic Press, New York, London (1961)
Author information
Authors and Affiliations
Corresponding author
Appendix: Expressions of kinetic and potential energy
Appendix: Expressions of kinetic and potential energy
In this Appendix, detailed expressions of kinetic energy and potential energy are given for the generalized model of the gimbal mounted gyroscope, described briefly in the first paragraph of Sect. 2.
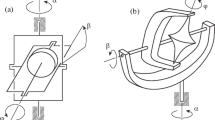
In accordance with this model, a dynamically and statically balanced rotor \(S^3\) is mounted in a gimbal suspension formed by two rigid bodies \(S^1, S^2\) of arbitrary shape (Fig. 1, b). Here, \(S^1\) is the outer element of the gimbal, and \(S^2\) is its inner element. Let \(l^0\) be the vertical axis, \(l^k\) \((k=1, 2, 3)\) be the axis of rotation of the body \(S^k\), and \(C^k\) be the center of mass of the body \(S^k\).
In order to define Lagrange coordinates and parameters of this mechanical system, we introduce a Cartesian coordinate system \(O^0{{\varvec{e}}}^0_1{{\varvec{e}}}^0_2{{\varvec{e}}}^0_3\), connected with the immovable foundation, and three Cartesian coordinate systems \(O^k{{\varvec{e}}}^k_1{{\varvec{e}}}^k_2{{\varvec{e}}}^k_3\) \((k=1, 2, 3)\), connected with rigid bodies \(S^k\).
Here, the first unit vector \({{\varvec{e}}}^0_1\) of the coordinate system \(O^0{{\varvec{e}}}^0_1{{\varvec{e}}}^0_2{{\varvec{e}}}^0_3\) is directed upward along the vertical axis \(l^0\). The first unit vector \({{\varvec{e}}}^k_1\) of the coordinate system \(O^k{{\varvec{e}}}^k_1{{\varvec{e}}}^k_2{{\varvec{e}}}^k_3\) \((k=1, 2, 3)\) has one of two possible directions along the axis \(l^k\). These directions are chosen such that the angles \(\theta ^k\) \((k=1, 2, 3)\) between the vectors \({{\varvec{e}}}^k_1\) and \({{\varvec{e}}}^{k-1}_1\) satisfy conditions \(\theta ^k \in [0, \pi /2]\).
The outer gimbal axis \(l^1\) is supposed to be vertical, and so \(\theta ^1=0\). The inner gimbal axis \(l^2\) is supposed to be not collinear to the outer gimbal axis \(l^1\) and to the axis of the rotor \(l^3\), and so we have \(\theta ^2, \theta ^3 \in (0, \pi /2]\). It allows us to define the second unit vectors \({{\varvec{e}}}^k_2\) \((k=1, 2)\) through the vector product by the formula \({{\varvec{e}}}^k_2={{\varvec{e}}}^{k+1}_1\times {{\varvec{e}}}^k_1 / \sin \theta ^{k+1}\). Unit vectors \({{\varvec{e}}}^k_2\) \((k=0, 3)\) are arbitrary. The third unit vectors \({{\varvec{e}}}^k_3\) \((k=0, 1, 2, 3)\) are defined by the formula \({{\varvec{e}}}^k_3={{\varvec{e}}}^k_1\times {{\varvec{e}}}^k_2\).
The point \(O^3\) coincides with the point \(C^3\) lying on the rotor axis \(l^3\). Points \(O^2\), \(O^1\) are situated on the axes \(l^2\), \(l^1\) so that the coordinate plane \(O^2{{\varvec{e}}}^2_2{{\varvec{e}}}^2_3\) comprises the point \(O^3\), the coordinate plane \(O^1{{\varvec{e}}}^1_2{{\varvec{e}}}^1_3\) comprises the point \(O^2\). Let
All components \(s^k_i, c^k_i\) \((i=1,2,3)\) of vectors \({{\varvec{s}}}^k\), \({{\varvec{c}}}^k\) are constant mechanical parameters. In accordance with the choice of the points \(O^1\) and \(O^2\), the first components of vectors \({{\varvec{s}}}^k\) are equal to zero: \(s^1_1=s^2_1=0\).
Let \(A^k_{ij}\) \((i, j=1,2,3)\) be components of the inertia tensor of the body \(S^k\) \((k=1,2,3)\) in the coordinate system \(O^k{{\varvec{e}}}^k_1{{\varvec{e}}}^k_2{{\varvec{e}}}^k_3\), connected with this body, and \(m^k\) be the mass of \(S^k\). In the case, when the rotor \(S^3\) is dynamically symmetric with respect to the axis \(l^3\), only diagonal components \(A^3_{11}\) and \(A^3_{22}=A^3_{33}\) of its inertia tensor are nonzero. We designate them by \(C\) and \(A\).
Rotation angles \(\alpha , \beta , \varphi \) of rigid bodies \(S^1, S^2, S^3\) about the axes \(l^1, l^2, l^3\) serve as Lagragian coordinates of the system. The angle \(\beta \) is counted in the plane orthogonal to the vector \({{\varvec{e}}}^2_1\) (i.e., to the axis \(l^2\)) from \(-{{\varvec{e}}}^1_2\) to \({{\varvec{e}}}^2_3\). In the case of the conventional model of the gimbal-mounted gyroscope, this definition of \(\beta \) agrees with its standard definition, i.e., \(\beta =0\) in the position when the rotor axis is orthogonal to the outer gimbal axis (Fig. 1, a).
With use of the Lagrange coordinates and mechanical parameters, introduced above, the expression of the kinetic energy for the generalized model of a gimbal-mounted gyroscope has the view (1), where
The potential energy is given by the formula
where \(g\) is the gravitational acceleration.
In Sect. 2 and in the proof of Lemma 3, we write \(\theta _2, \theta _3\) instead of \(\theta ^2, \theta ^3\). In Sect. 8, we use a simlified notation for mechanical parameters. In particular, we designate \(m^3, s^2_3\) by \(m, s\), and we write \(A\) instead of \(A+ms^2\).
In [16], more general model of the gimbal-mounted gyroscope is considered with dynamically and statically asymmetric rotor and nonvertical outer gimbal axis.
Rights and permissions
About this article

Cite this article
Konosevich, B., Konosevich, Y. Global attraction of steady motions of a gimbal-mounted asynchronous gyroscope. Nonlinear Dyn 79, 2005–2015 (2015). https://doi.org/10.1007/s11071-014-1789-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1789-z