
Abstract
Lyapunov equation is extensively applied in engineering areas, and zeroing neural networks (ZNN) are very effective in solving this kind of equation. In this paper, two predefined-time stability theorems are used to devise new activation functions. Then, we obtain two new ZNN models, which are applied in solving the Lyapunov equation. This type of model is called the predefined-time stability-based zeroing neural network model. Compared with the ZNN models which have existed, the proposed model retains the noise-tolerant virtue and gains a new advantage: predefined-time convergence. Lastly, we verify that the model developed in this paper is superior to the known models in solving the time-variant Lyapunov equation via numerical simulations.
Similar content being viewed by others


Explore related subjects
Find the latest articles, discoveries, and news in related topics.Avoid common mistakes on your manuscript.
1 Introduction
As an important type of matrix equation, the Lyapunov equation is extensively applied in lots of engineering areas, including communication [1] and control [2,3,4,5]. Therefore, there is significant value in solving the Lyapunov equation. To solve this kind of equation, scholars have proposed some excellent algorithms, in which the most influential ones are traditional numerical algorithms [6,7,8,9]. Nonetheless, these numerical algorithms require extremely high time complexity, which impacts the application scope of the algorithms greatly.
Recently, the academic circles have achieved great development in the research on neural networks, and the application scope of these achievements covers multiple fields. Since gradient neural network (GNN) has the virtues of parallel distribution and hardware reliability, it is suitable for solving the stationary Lyapunov equation [10, 11]. GNN performs very well in solving the stationary Lyapunov equations, but it cannot solve the time-variant ones. If we use GNN to solve time-variant Lyapunov equation, a large delay error will occur, which results in that GNN cannot stabilize to the solution accurately.
In [12], a peculiar recurrent neural network was put forward. In this kind of neural network, the error always tends to zero, so this kind of neural network is referred to zeroing neural network. Many works have shown that ZNN can solve plenty of time-variant problems [13,14,15,16]. Nonetheless, the ordinary ZNN model has an obvious defect. For the ordinary ZNN model, it needs infinite time to stabilize to the theoretical solution, so the cost of time will be unacceptable.
To optimize the convergence times of ZNNs, finite-time stability and fixed-time stability were introduced into the research on ZNNs. As we know, the convergence speed of ZNN mainly depends on activation function (AF). By designing AFs based on finite-time stability theorems, ZNNs that can reach finite-time convergence were developed firstly [17, 18]. However, for finite-time stability-based ZNN, the convergence time is closely connected with the initial state of ZNN. If the initial state is undetermined, it will be impossible to calculate the convergence time, which limits the usability of finite-time stability-based ZNN. Furthermore, noise interference is inevitable in realistic applications, which may affect the convergence of ZNN. Hence, besides the convergence times of ZNNs, the robustness of ZNNs should also be investigated [19,20,21]. In [22], by designing AFs based on fixed-time stability theorems, Xiao et al. established two fresh fixed-time stability-based noise-resistant ZNN (NRZNN) models. These two models can not only converge in fixed-time but also tolerate various noises. For the above NRZNN models, the convergence times are bounded by an upper bound, which does’t rely on the initial values of NRZNNs and can be calculated based on the related parameters. However, it is tough to adjust the above-mentioned upper bound via the related parameters. Although subsequent researchers have greatly improved the fixed-time convergence speed [23,24,25], the upper bound of the convergence time still cannot be chosen arbitrarily in advance.
In recent years, predefined-time stability [26,27,28,29] was proposed. In fact, the related predefined-time stability theorems can be used to design predefined-time stability-based ZNN. For predefined-time stability-based ZNN, the convergence times are bounded by an upper bound, which does’t rely on the initial value of ZNN and can be an arbitrarily predefined time. Furthermore, the predefined time can be set as a model parameter in advance. However, until now, predefined-time stability has not been applied in the research on ZNNs, and it has not been applied in solving the Lyapunov equation either.
In this paper, we transform the problem of solving the time-variant Lyapunov equations into the convergence problem of ZNN. Two predefined-time stability theorems are used to devise new activation functions, and then we obtain two predefined-time stability-based ZNN (PTZNN) models. These two models still reserve the anti-noise virtue, and they can reach convergence within an arbitrarily predefined time. Lastly, we verify that the ZNNs developed in this paper are superior to the known ZNNs in solving the time-variant Lyapunov equation via numerical simulations. Compared with the ZNNs in [17, 18, 20, 22, 25], the ZNNs developed in this paper have the following obvious advantage: regardless of the initial values of ZNNs, the upper bound of the convergence times can be adjusted flexibly and set as a parameter of ZNNs in advance.
The remainder of this paper includes four sections. Essential preliminaries are presented in Sect. 2, and the theoretical results are given in Sect. 3. Numerical simulations are provided in Sect. 4, and Conclusions are given in Sect. 5.
2 Preliminaries and ZNN Model
Consider the time-variant Lyapunov equation as follows:
where \( M(t)\in {\mathbb {R}}^{n\times n}\) denotes a known time-variant coefficient matrix; \( Q(t)\in {\mathbb {R}}^{n\times n}\) denotes a known time-variant matrix; \( X(t) \in {\mathbb {R}}^{n\times n}\) denotes the matrix which should be solved. Suppose that \(X^{*}(t)\) is the theoretical solution of Eq. (1).
First, we introduce a matrix-valued error E(t), where
As we know, when the error E(t) converges to 0, the corresponding X(t) will be the solution of Eq. (1). Therefore, we should ensure E(t) can converge to 0 within some time.
To ensure the error E(t) can converge to 0, we adopt the following ZNN design:
where \(\psi ( \cdot ): {\mathbb {R}} ^ { n \times n }\rightarrow {\mathbb {R}} ^ { n \times n }\) stands for the array of activation functions; \({ T _ { c } }>0\) is the predefined time, and it denotes a known tunable parameter.
By substituting (2) into (3), we get the following ZNN model:
For this ZNN model, if we choose the suitable \(\psi ( \cdot )\), no matter X(t) begins with arbitrary initial state X(0), it can stabilize to the theoretical solution \(X^{*}(t)\) within the predefined time \(T _ { c }\).
In this part, consider nonlinear system \(\dot{x}(t)=f(x(t))\), where \(x(t) \in {\mathbb {R}}^{n}\); \(f: {\mathbb {R}}^{n} \rightarrow {\mathbb {R}}^{n}\) is a continuous function, and \(f(0)=0\).
Definition 1
No matter x(t) begins with arbitrary initial state x(0), if given any \(T_{c}>0\), x(t) can converge to 0 within \(T_{c}\), then the above nonlinear system is said to reach predefined-time stability, and \(T_{c}>0\) is the predefined time.
Lemma 1
[30]. Gamma function \(\Gamma (\cdot )\) is defined as \(\Gamma (z)=\int _{0}^{+\infty }e^{-t}t^{z-1}dt\). If continuous function \(V(\cdot ):{\mathbb {R}}^{n}\rightarrow {\mathbb {R}}_{+}\cup \{0\}\) satisfies
-
(i)
\(V(x(t))=0 \Leftrightarrow x(t)=0;\)
-
(ii)
\(\Vert x(t)\Vert \rightarrow +\infty \Rightarrow V(x(t))\rightarrow +\infty ;\)
-
(iii)
for \(\forall x(t)\in {\mathbb {R}}^{n}\) and \(\forall T_{c}>0\), there exist \(\alpha ,~\beta >0,~0<p<1\) and \(q>1\) such that
$$\begin{aligned} {\dot{V}}(x(t))\le -\frac{T_{\max }}{T_{c}}\left( \alpha V^{p}(x(t))+\beta V^{q}(x(t))\right) , \end{aligned}$$where \(T_{\max }= \frac{\Gamma (\frac{1-p}{q-p})\Gamma (\frac{q-1}{q-p})}{\alpha (q-p)} \left( \frac{\alpha }{\beta }\right) ^{\frac{1-p}{q-p}}\), then the above nonlinear system reaches predefined-time stability, and \(T_{c}\) is the predefined time.
Lemma 2
[31]. If continuous function \(V(\cdot ):{\mathbb {R}}^{n}\rightarrow {\mathbb {R}}_{+}\cup \{0\}\) satisfies
-
(i)
\(V(x(t))=0 \Leftrightarrow x(t)=0;\)
-
(ii)
\(\Vert x(t)\Vert \rightarrow +\infty \Rightarrow V(x(t))\rightarrow +\infty ;\)
-
(iii)
for \(\forall x(t)\in {\mathbb {R}}^{n}\) and \(\forall T_{c}>0\), there exists \(0<p\le 1\) such that
$$\begin{aligned} {\dot{V}}(x(t))\le -\frac{1}{p\cdot T_{c}}\exp (V^{p}(x(t)))V^{1-p}(x(t)), \end{aligned}$$then the above nonlinear system reaches predefined-time stability, and \(T_{c}\) is the predefined time.
3 The Predefined-Time Convergence of the PTZNN Models
Since the convergence speed of ZNN mainly depends on activation function (AF), we design two new AFs as follows:
where \(w= \frac{\Gamma (\frac{1-p}{q-p})\Gamma (\frac{q-1}{q-p})}{ a _ { 1 }(q-p)} \left( \frac{ a _ { 1 }}{ a _ { 2 }}\right) ^{\frac{1-p}{q-p}}\), \(a_{1},a_{2}>0\), \(a_{3},a_{4}\ge 0\), \(0<p<1\), \(q>1\), \(0<h<1\), \(b_{1},b_{2}\ge 0\).
Next, we shall propose two new PTZNN models based on these two AFs. Then we prove they can reach predefined-time stability, and the cases with noise disturbances are also considered.
A. Model-1
When AF array \(\psi _1(\cdot ): {\mathbb {R}} ^ { n \times n }\rightarrow {\mathbb {R}} ^ { n \times n }\) is applied to activate the ZNN model (4), we can gain the first PTZNN model:
Theorem 1
Starting with a stochastic initial matrix \(X(0)\in {\mathbb {R}} ^ { n \times n }\), model (7) can output the theoretical solution of Eq. (1) within a predefined time \( T _ { c }\).
Proof
In fact, model (7) is equivalent to \({\dot{E}} (t) = - \frac{ 1 }{ T_{c} }\psi _1 (E(t))\), each subsystem of which can be written as
where \(E(t)=(e_{ij}(t))_{n\times n}\) and \({\dot{E}}(t)=({\dot{e}}_{ij}(t))_{n\times n}\).
If subsystem (8) can converge within \( T _ { c }\), then model (7) can converge within \( T _ { c }\). To prove subsystem (8) can reach predefined-time stability within \(T_{c}\), we choose Lyapunov function
Its time derivative is
If the above equation is combined with AF(5), it follows that
Based on Lemma 1, subsystem (8) can reach predefined-time stability within \(T_{c}\). Therefore, model (7) can reach predefined-time stability within \(T_{c}\). \(\square \)
We can further consider PTZNN model with noise disturbance:
(1) Case 1: \(Y(t)=(y_{ij}(t))_{n\times n}\) is a dynamic bounded vanishing noise.
Theorem 2
If Y(t) is a dynamic bounded vanishing noise satisfying \(|y _ {ij}(t)|\le \delta |e_{ij}(t)|\), where \( \delta \in ( 0, + \infty )\). Starting with a stochastic initial matrix \(X(0)\in {\mathbb {R}} ^ { n \times n }\), model (9) can output the theoretical solution of Eq. (1) within a predefined time \( T _ { c }\), as long as \(a_{3}\ge \delta T_{c}\).
Proof
In fact, model (9) is equivalent to \({\dot{E}}(t)= -\frac{1}{T _ {c} }\psi _1 (E (t))+Y(t) \), each subsystem of which can be written as
where \(E(t)=(e_{ij}(t))_{n\times n}\), \({\dot{E}}(t)=({\dot{e}}_{ij}(t))_{n\times n}\) and \(Y(t)=(y_{ij}(t))_{n\times n}\).
To prove subsystem (10) can reach predefined-time stability within \(T_{c}\), we choose Lyapunov function
Its time derivative is
If the above equation is combined with AF(5) and \(a_{3}\ge \delta T_{c}\), it follows that
Moreover,
Based on Lemma 1, subsystem (10) can reach predefined-time stability within \(T_{c}\). Therefore, model (9) can reach predefined-time stability within \(T_{c}\). \(\square \)
(2) Case 2: \(Y(t)=(y_{ij}(t))_{n\times n}\) is a dynamic bounded nonvanishing noise.
Theorem 3
If Y(t) is a dynamic bounded nonvanishing noise satisfying \(|y _ {ij}(t)|\le \delta \), where \( \delta \in ( 0, + \infty )\). Starting with a stochastic initial matrix \(X(0)\in {\mathbb {R}} ^ { n \times n }\), model (9) can output the theoretical solution of Eq. (1) within a predefined time \( T _ { c }\), as long as \(a_{4}\ge \delta T_{c}\).
Proof
Similarly to Theorem 2, we choose Lyapunov function
Its time derivative is
If the above equation is combined with AF (5) and \(a_{4}\ge \delta T_{c}\), it follows that
Similarly to Theorem 2, model (9) can reach predefined-time stability within \(T_{c}\). \(\square \)
B. Model-2
When AF array \(\psi _2(\cdot ): {\mathbb {R}} ^ { n \times n }\rightarrow {\mathbb {R}} ^ { n \times n }\) is applied to activate the ZNN model (4), we can gain the second PTZNN model:
Theorem 4
Starting with a stochastic initial matrix \(X(0)\in {\mathbb {R}} ^ { n \times n }\), model (11) can output the theoretical solution of Eq. (1) within a predefined time \( T _ { c }\).
Proof
In fact, model (11) is equivalent to \({\dot{E}} (t) = - \frac{ 1 }{ T _ { c } }\psi _2 ( E ( t ) )\), each subsystem of which can be written as
where \(E(t)=(e_{ij}(t))_{n\times n}\) and \({\dot{E}}(t)=({\dot{e}}_{ij}(t))_{n\times n}\).
To prove subsystem (12) can reach predefined-time stability within \(T_{c}\), we choose Lyapunov function
Its time derivative is
If the above equation is combined with AF(6), it follows that
Based on Lemma 2, subsystem (12) can reach predefined-time stability within \(T_{c}\). Therefore, model (11) can reach predefined-time stability within \(T_{c}\). \(\square \)
We can further consider PTZNN model with noise disturbance
(1) Case 1: \(Y(t)=(y_{ij}(t))_{n\times n}\) is a dynamic bounded vanishing noise.
Theorem 5
If Y(t) is a dynamic bounded vanishing noise is a dynamic bounded vanishing noise satisfying \(|y_ {ij}(t)|\le \delta |e_{ij}(t)|\), where \( \delta \in (0,+\infty )\). Starting with a stochastic initial matrix \(X(0)\in {\mathbb {R}} ^ { n \times n }\), model (13) can output the theoretical solution of Eq. (1) within a predefined time \( T _ { c }\), as long as \(b_{1}\ge \delta T_{c}\).
Proof
In fact, model (13) is equivalent to \({\dot{E}}(t)= -\frac{1}{T _ {c} }\psi _2(E (t))+Y(t) \), each subsystem of which can be written as
where \(E(t)=(e_{ij}(t))_{n\times n}\), \({\dot{E}}(t)=({\dot{e}}_{ij}(t))_{n\times n}\) and \(Y(t)=(y_{ij}(t))_{n\times n}\).
To prove subsystem (14) can reach predefined-time stability within \(T_{c}\), we choose Lyapunov function
Its time derivative is
If the above equation is combined with AF(6) and \(b_{1}\ge \delta T_{c}\), it follows that
Based on Lemma 2, subsystem (14) can reach predefined-time stability within \(T_{c}\). Therefore, model (13) can reach predefined-time stability within \(T_{c}\). \(\square \)
(2)Case 2: \(Y(t)=(y_{ij}(t))_{n\times n}\) is a dynamic bounded nonvanishing noise.
Theorem 6
If Y(t) is a dynamic bounded nonvanishing noise satisfying \(|y_ {ij}(t)|\le \delta \), where \( \delta \in (0,+\infty )\). Starting with a stochastic initial matrix \(X(0)\in {\mathbb {R}} ^ { n \times n }\), model (13) can output the theoretical solution of Eq. (1) within a predefined time \( T _ { c }\), as long as \(b_{2}\ge \delta T_{c}\).
Proof
Similarly to Theorem 5, we choose Lyapunov function
Its time derivative is
If the above equation is combined with AF(6) and \(b_{2}\ge \delta T_{c}\), it follows that
Similarly to Theorem 5, model (13) can reach predefined-time stability within \(T_{c}\). \(\square \)
Remark 1
At the beginning of this section, AF(5) and AF(6) are defined, and the conditions that the parameters in AF(5) and AF(6) should satisfy have also been given: \(w=\frac{\Gamma (\frac{1-p}{q-p})\Gamma (\frac{q-1}{q-p})}{ a _ { 1 }(q-p)} \left( \frac{ a _ { 1 }}{ a _ { 2 }}\right) ^{\frac{1-p}{q-p}}\), \(a_{1},a_{2}>0\), \(a_{3},a_{4}\ge 0\), \(0<p<1\), \(q>1\), \(0<h<1\), \(b_{1},b_{2}\ge 0\). Theorems 1-3 are related to AF(5), so the parameters in AF(5) must satisfy the following conditions: \(w=\frac{\Gamma (\frac{1-p}{q-p})\Gamma (\frac{q-1}{q-p})}{ a _ { 1 }(q-p)} \left( \frac{ a _ { 1 }}{ a _ { 2 }}\right) ^{\frac{1-p}{q-p}}\), \(a_{1},a_{2}>0\), \(a_{3},a_{4}\ge 0\), \(0<p<1\), \(q>1\). Moreover, in Theorem 2 the parameter \(a_{3}\) in AF(5) should satisfy \(a_{3}\ge \delta T_{c}\), and in Theorem 3 the parameter \(a_{4}\) in AF(5) should satisfy \(a_{4}\ge \delta T_{c}\), where \(T_{c}\) is the predefined time and \(\delta \) is a constant about noise. Theorems 4-6 are related to AF(6), so the parameters in AF(6) must satisfy the following conditions: \(0<h<1\), \(b_{1},b_{2}\ge 0\). Moreover, in Theorem 5 the parameter \(b_{1}\) in AF(6) should satisfy \(b_{1}\ge \delta T_{c}\), and in Theorem 6 the parameter \(b_{2}\) in AF(6) should satisfy \(b_{2}\ge \delta T_{c}\), where \(T_{c}\) is the predefined time and \(\delta \) is a constant about noise. If some parameters in AF(5) and AF(6) don’t satisfy the related conditions, the corresponding PTZNNs cannot reach predefined-time stability within \(T_{c}\), at least in theory.
4 Numerical Simulation
In this section, we verify the derived results via numerical simulations. Simulation results show that, the models developed in this paper are superior to the known models in solving the time-variant Lyapunov equation.
Example 1
Let \(a_ {1}=a_{2}=a_{3}=a_{4}=b_{1}=b_{2}= 1\), \(p=h=0.25\), \(q=4\). Through calculating, \(w=\frac{4\pi }{{15\sin (0.2\pi )}}\). The coefficient matrices of Eq. (1) are \(M(t) = \left[ \begin{array} { l l } {-1-\frac{1}{2} \cos (4t) } &{} { \frac{1}{2} \sin (4t)} \\ { \frac{1}{2} \sin (4t) } &{} {-1+ \frac{1}{2} \cos (4t) } \end{array} \right] \), \(Q (t) = \left[ \begin{array} { l l } {\sin (4t) } &{} { \cos (4t)} \\ { -\cos (4t) } &{} { \sin (4t)} \end{array} \right] \). We set the predefined time \(T_{c}=1\). The theoretical solution of Eq. (1) is
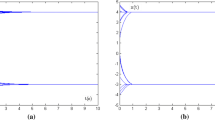
The noiseless Eq. (1) can be solved by using models (7) and (11). Figures 1, 2 and 3 show the main simulation results. The state solution of Eq. (1) based on model (7) and AF(5) is shown in Fig. 1, where \(X(t)=(x_{ij}(t))_{2\times 2}\), \(X^{*}(t)=(x_{ij}^{*}(t))_{2\times 2}\). Figure 1 illustrates that blue lines and red lines overlap within a short time, where blue line indicates the state solution of each subsystem starting from X(0), and red line indicates the exact solution of each subsystem. The state solution of Eq. (1) based on model (11) and AF(6) is shown in Fig. 2.



Figure 3 illustrates the residual errors of noiseless Eq. (1) based on models (7) and (11). In Fig. 3, the residual error based on model (7) converges to zero within about 0.2, and the residual error based on model (11) converges to zero within about 0.3, which verifies the actual convergence times are not more than the predefined time \(T_{c}=1\).

The residual errors of Eq. (1) with different noises based on NRZNN, model (9) and model (13), where the parameters of Eq. (1) have been given in Example 1. (a) with noise \(y_{ij}(t) = 0\); (b) with noise \(y_{ij}(t)=0.3\sin (3t)\); (c) with noise \(y_{ij}(t)=1\); (d) with noise \(y_{ij}(t)=0.8|e_{ij}(t)|\), \(i,j\in \left\{ 1,2\right\} \)
For comparison, noise-resistant ZNN (NRZNN), model (9) and model (13) are all used to solve Eq. (1) with different noises, and the corresponding residual errors are given in Fig. 4. Figure 4 illustrates that, regardless of the presence or type of noise, the convergence speeds based on model (9) and model (13) are almost not affected. However, if there exists noise, the convergence speed based on NRZNN slows down obviously. Therefore, we conclude that model (9) and model (13) have the better anti-noise performance, compared with the previous ZNN models.
Example 2
Let \(a_ {1}=a_{2}=a_{3}=a_{4}=b_{1}=b_{2}= 0.5\), \(p=h=0.5\), \(q=2\). Through calculating, \(w=1.5\pi \). The coefficient matrices of Eq. (1) are
where s and c represent \(\sin (t)\) and \(\cos (t)\), respectively. We set the predefined time \(T_{c}=0.5\). The theoretical solution of Eq. (1) is


Equation (1) with constant noise \(y_{ij}(t)=1\) can be solved by using models (9) and (13), \(i,j\in \left\{ 1,2\right\} \). Figures 5, 6 show the main simulation results. The state solution of Eq. (1) based on model (9) and AF(5) is shown in Fig. 5, where \(X(t)=(x_{ij}(t))_{2\times 2}\), \(X^{*}(t)=(x_{ij}^{*}(t))_{2\times 2}\). Figure 5 illustrates that blue lines and red lines overlap within a short time (about 0.2), where blue line indicates the state solution of each subsystem starting from X(0), and red line indicates the exact solution of each subsystem. The state solution of Eq. (1) based on model (13) and AF (6) is shown in Fig. 6. The convergence times of both models are not greater than the predefined time \(T_{c}=0.5\).
Similarly to Example 1, NRZNN, model (9) and model (13) are all used to solve Eq. (1) with different noises, and the corresponding residual errors are given in Fig. 7. Figure 7 illustrates that, regardless of the presence or type of noise, the convergence speeds based on model (9) and model (13) are almost not affected. However, if there exists noise, the convergence speed based on NRZNN slows down obviously. Therefore, we conclude that model (9) and model (13) have the better anti-noise performance, compared with the previous ZNN models.

The residual errors of Eq. (1) with different noises based on NRZNN, model (9) and model (13), where the parameters of Eq. (1) have been given in Example 2. (a) with noise \(y_{ij}(t) = 0\); (b) with noise \(y_{ij}(t)=0.5\cos (1.8t)\); (c) with noise \(y_{ij}(t)=2\); (d) with noise \(y_{ij}(t)=0.6|e_{ij}(t)|\), \(i,j\in \left\{ 1,2\right\} \)
5 Conclusions
In this paper, two PTZNN models are proposed by introducing predefined-time stability theorems into activation functions, and then they are applied to solve the time-variant Lyapunov equation. We prove the PTZNN models can reach predefined-time stability, and the noise-tolerant performance of the PTZNN models are also analyzed strictly. Finally, we verify that the models developed in this paper are superior to the known models in solving the time-variant Lyapunov equation via numerical simulations. Due to the existence of \(T_{\max }\), the predefined-time stability theorem in Lemma 1 is a bit complicated, so activation function (5) is also a bit complicated. In fact, there is another predefined-time stability theorem, which is the special case of Lemma 1 and more concise than Lemma 1. However, the above predefined-time stability theorem is not discussed in this paper. In the future, we shall use the above predefined-time stability theorem to solve some time-variant equations.
References
Mutlu I, Schrödel F, Bajcinca N, Abel D, Söylemez M (2016) Lyapunov equation based stability mapping approach: A MIMO case study. IFAC-PapersOnLine 49(9):130–135
Benner P (2004) Solving large-scale control problems. IEEE Control Syst 24(1):44–59
Qian Y, Pang W (2015) An implicit sequential algorithm for solving coupled Lyapunov equations of continuous-time Markovian jump systems. Automatica 60:245–250
Zhou B, Duan G, Lin Z (2011) A parametric periodic Lyapunov equation with application in semi-global stabilization of discrete-time periodic systems subject to actuator saturation. Automatica 47(2):316–325
Xiao L, Liao B, Li S, Zhang Z, Ding L, Jin L (2018) Design and analysis of FTZNN applied to the real-time solution of a nonstationary Lyapunov equation and tracking control of a wheeled mobile manipulator. IEEE Trans Ind Inform 14(5):98–105
Wang W, Liu Y, Zhao H (2019) A gradient-based iterative algorithm for solving coupled Lyapunov equations of continuous-time Markovian jump systems. Automatika 60(4):510–518
Zhang H (2019) Quasi gradient-based inversion-free iterative algorithm for solving a class of the nonlinear matrix equations. Comput Math Appl 77(5):1233–1244
Wang G, Huang H, Yan J, Cheng Y, Fu D (2020) An integration-implemented Newton-Raphson iterated algorithm with noise suppression for finding the solution of dynamic Sylvester equation. IEEE Access 8:34492–34499
Zhang Y, Ke Z, Li Z, Guo D (2011) Comparison on continuous-time Zhang dynamics and Newton-Raphson iteration for online solution of nonlinear equations. Int Sympos Neural Netw 6675:393–402
Zhang Y, Chen K, Li X, Yi C, Zhu H (2008) Simulink modeling and comparison of Zhang neural networks and gradient neural networks for time-varying Lyapunov equation solving. Fourth Int Confer Natural Computat IEEE 3:521–525
Yi C, Chen Y, Lu Z (2011) Improved gradient-based neural networks for online solution of lyapunov matrix equation. Inform Process Lett 111(16):780–786
Zhang Y, Ge S (2005) Design and analysis of a general recurrent neural network model for time-varying matrix inversion. IEEE Trans Neural Netw 16(6):1477–1490
Zhang Y, Li W, Guo D, Ke Z (2013) Different Zhang functions leading to different ZNN models illustrated via time-varying matrix square roots finding. Expert Syst Appl 40(11):4393–4403
Zhang Y, Yang Y, Cai B, Guo D (2012) Zhang neural network and its application to newton iteration for matrix square root estimation. Neural Comput Appl 21(3):453–460
Xiao L, Zhang Z, Zhang Z, Li W, Li S (2018) Design, verification and robotic application of a novel recurrent neural network for computing dynamic Sylvester equation. Neural Netw 105:185–196
Uhlig F, Zhang Y (2019) Time-varying matrix eigenanalyses via Zhang neural networks and look-ahead finite difference equations. Linear Algebra Appl 580(1):417–435
Xiao L, Liao B, Li S, Chen K (2018) Nonlinear recurrent neural networks for finite-time solution of general time-varying linear matrix equations. Neural Netw 98:102–113
Li S, Chen S, Liu B (2013) Accelerating a recurrent neural network to finite-time convergence for solving time-varying Sylvester equation by using a sign-bi-power activation function. Neural Process Lett 37(2):189–205
Jin L, Zhang Y, Li S (2016) Integration-enhanced zhang neural network for real-time-varying matrix inversion in the presence of various kinds of noises. IEEE Trans Neural Netw Learn Syst 27(12):2615–2627
Xiao L, Li S, Yang J, Zhang Z (2018) A new recurrent neural network with noise-tolerance and finite-time convergence for dynamic quadratic minimization. Neurocomputing 285:125–132
Xiao L, Zhang Y, Zuo Q, Dai J, Tang W (2020) A noise tolerant zeroing neural network for time-dependent complex matrix inversion under various kinds of noises. IEEE Trans Ind Inform 16(6):3757–3766
Xiao L, Zhang Y, Dai J, Li J, Li W (2021) New noise-tolerant ZNN models with predefined-time convergence for time-variant sylvester equation solving. IEEE Trans Syst Man Cyber Syst 51(6):3629–3640
Chen C, Li L, Peng H, Yang Y, Mi L, Zhao H (2020) A new fixed-time stability theorem and its application to the fixed-time synchronization of neural networks. Neural Netw 123:412–419
Chen C, Li L, Peng H, Yang Y, Mi L, Wang L (2019) A new fixed-time stability theorem and its application to the synchronization control of memristive neural networks. Neurocomputing 349:290–300
Zhang M, Zheng B (2022) Accelerating noise-tolerant zeroing neural network with fixed-time convergence to solve the time-varying Sylvester equation. Automatica 135:109998
Chen C, Mi L, Liu Z, Qiu B, Zhao H, Xu L (2021) Predefined-time synchronization of competitive neural networks. Neural Netw 142:492–499
Liu A, Zhao H, Wang Q, Niu S, Gao X, Chen C, Li L (2022) A new predefined-time stability theorem and its application in the synchronization of memristive complex-valued BAM neural networks. Neural Netw 153:152–163
Zhang Y, Yang Y, Tan N (2019) Time-varying matrix square roots solving via Zhang neural network and gradient neural network: modeling, verification and comparison. Proc Int Symp Neural Netw 5551:11–20
Chen C, Mi L, Zhao D, Guan H, Li L, Zhao H (2022) A new judgement theorem for predefined-time stability and its application in the synchronization analysis of neural networks. Int J Robust Nonlinear Control 32(18):10072–10086
Aldana-López R, Gómez-Gutiérrez D, Jiménez-Rodirguez E, Sánchez-Torres J, Defoort M (2019) Enhancing the settling time estimation of a class of fixed-time stable systems. Int J Robust Nonlinear Control 29:4135–4148
Jiménez-Rodrgiuez E, Sánchez-Torres J, Loukianov A (2017) On optimal predefined-time stabilization. Int J Robust Nonlinear Control 27(17):3620–3642
Acknowledgements
The work is supported by the National Key R &D Program of China (2023YFB3107303), the National Natural Science Foundation of China (62172244), the Natural Science Foundation of Shandong Province (ZR2021MF090 and ZR2020YQ06), the Taishan Scholars Program (tsqn202211210), the Innovation Ability Pormotion Project for Small and Medium-sized Technology-based Enterprise of Shandong Province (2023TSGC0197), the Natural Science Project of Xinjiang University Scientific Research Program (XJEDU2021Y003), the Young Innovation Team of Colleges and Universities in Shandong Province (2021KJ001) and the Pilot Project for Integrated Innovation of Science, Education and Industry of Qilu University of Technology (Shandong Academy of Sciences) (2022JBZ01-01).
Author information
Authors and Affiliations
Contributions
Yuanda Yue: Writing–original draft; Formal analysis. Ling Mi: Supervision; Writing–review & editing; Funding acquisition. Chuan Chen: Conceptualization; Methodology; Software; Funding acquisition. Yanqing Yang: Supervision; Funding acquisition.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yue, Y., Mi, L., Chen, C. et al. Predefined-Time Stability-Based Zeroing Neural Networks and Their Application in Solving the Lyapunov Equation. Neural Process Lett 56, 14 (2024). https://doi.org/10.1007/s11063-024-11470-x
Accepted:
Published:
DOI: https://doi.org/10.1007/s11063-024-11470-x