
Abstract
Context
Human activities are reducing the amount and quality of natural landscapes. Understanding how such changes affect the spatial and temporal ecology of mammal populations will enable us to foresee how communities will be structured in the Anthropocene.
Objectives
Here, we evaluated how the occupancy, intensity of use, and activity patterns of the mesopredator canid Cerdocyon thous are affected by topographic variation, habitat amount, fragmentation and chronic anthropogenic disturbances.
Methods
Camera trapping data were obtained between May and September 2014 in 179 sampling points within ten priority areas for conservation in a seasonally dry tropical forest (Caatinga) in Brazil, totaling an effort of 6,701 camera.days. We use occupancy models for analyzed occupancy, generalized linear models (GLM) for the intensity of use and kernel density curve for activity pattern.
Results
Cerdoyon thous benefited from human disturbance, showing greater occupancy and intensity of use near anthropogenic habitats, fragmentation, human density and cattle density. Moreover, temporal analyses showed that it modulates its daily activity according to habitat amount, human density, cattle density and altitude. However, C. thous tends to avoid areas with excess of fire, logging and infrastructures.
Conclusions
These results allow us to understand the mechanisms that contribute to the dominance of generalist mesocarnivores in human-dominated environments.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Human activities have caused profound changes in the availability, configuration, and quality of habitats around the world (Magioli et al. 2021; Antongiovanni et al. 2020). These impacts are expected to become increasingly intense as a result of continued human population growth and high consumption patterns (Lima et al. 2021). These changes pose major challenges for specialized mammal species (Magioli et al. 2021), but may represent ecological opportunities for generalists. Understanding the spatio-temporal mechanisms that permit certain species to adapt to environmental changes will allow us to make better predictions of how communities will be structured in the Anthropocene.
Habitat loss is considered one of the major factors responsible for the decline of biodiversity worldwide (Caro et al. 2022). Indeed, Fahrig (2013) proposed that the amount of natural habitat in the landscape is the single most important predictor of local biodiversity and that spatial configuration would play a secondary role. According to this proposition, fragments would not be effective sampling units for biodiversity studies, contrary to what has been assumed in a large number of empirical studies (Fahrig 2013). Some recent studies have corroborated Fahrig's habitat amount hypothesis (Gardiner et al. 2018; Melo et al. 2017; Watling et al. 2020).
Habitat configuration, however, emerges as a determinant of biodiversity in several studies that have controlled for habitat amount (Bueno and Peres 2019; Evju and Sverdrup-Thygeson 2016; Haddad et al. 2017; Saura 2020; Putker et al. 2020). Habitat configuration is related to fragmentation per se, which is the division of an extensive natural habitat area (Rybicki et al. 2020) that causes modifications in the size, number, shape, and spatial arrangement of fragments (Ewers et al. 2013; Rösch et al. 2015; Antongiovanni et al. 2018), and these metrics are often correlated. Habitat fragmentation generates, for example, decreased connectivity between remnants of native vegetation that affects the movement of fauna and facilitation of the invasion process by exotic or matrix species (Fischer and Lindenmayer 2007; Crooks et al. 2017). However, positive effects have also been reported for some species, such as the possibility of exploiting resources from the matrices, increased habitat diversity, reduced intra- and interspecific competition, and continuity in predator–prey dynamics (Garmendia et al. 2013; Fahrig 2017).
Habitat quality is also an important factor in structuring biodiversity. In fact, low intensity activities exerted by humans continuously over a long period, the so-called chronic anthropogenic disturbance (CAD), have the ability to modify the composition, structure and functioning of ecosystems (Albuquerque et al. 2018; Câmara et al. 2019; Singh 1998). Activities that can cause chronic anthropogenic disturbance include human presence, edge effects caused by infrastructure (e.g. paved and unpaved roads, railroads, and transmission lines), grazing, fire, logging, as well as fishing, hunting and use of other natural resources (Albuquerque et al. 2018; Antongiovanni et al. 2020). The consequences of chronic anthropogenic disturbances include reduced phylogenetic and functional diversity of communities, biotic homogenization, and impact on population interactions and survival (Ribeiro et al. 2015; Silva et al. 2020; Wallgren et al. 2009).
In order to deal with novel landscapes, mammals have to change their space and time use strategy (Dias et al. 2019a; Massara et al. 2018). It is expected that species with specialized diets, more restricted habitats, less diverse behavioral repertoire and direct conflicts with man will have greater difficulty coping with landscape changes, while more generalist species will have flexibility in the use of space and time to deal with altered habitats and the new habitats that are being created in the Anthropocene. Habitat loss and fragmentation has especially affected the persistence of top predatory mammals, reducing top-down control that ultimately benefits mesocarnivore populations (Magioli et al. 2021).
The neotropical canid Cerdocyon thous, popularly known as the crab-eating fox, is an omnivorous mesocarnivore with nocturnal and crepuscular habits (Faria-Corrêa et al. 2009; Monteiro-Alves et al. 2019; Rocha et al. 2008). The species has a wide distribution in South America and is considered generalist and flexible in terms of habitat use (Dias and Bocchiglieri 2016). Cerdocyon thous is abundant in its range and in surveys conducted in Caatinga dry forest areas is currently the dominant species in the medium and large mammal community (Beisiegel et al. 2013; Marinho et al. 2018a). Recently an expansion in its range has been reported, possibly resulting from factors such as deforestation, agricultural expansion, and extinction of top predators (Hody et al. 2019). Given its regional ecological importance, some studies have contributed to unravel the ecology and distribution of C. thous in the Caatinga (Dias and Bocchiglieri 2016; Dias et al. 2019a; Marinho et al. 2020; Penido et al. 2017).
The objective of this work was to evaluate the relative importance of habitat amount, habitat fragmentation and chronic anthropogenic disturbance on the occurrence patterns, intensity of use, and daily activity patterns of the generalist mesopredator Cerdocyon thous. Concerning chronic anthropogenic disturbances, we specifically evaluated five vectors: human density, grazing, logging, fire and infrastructure (e.g., roads). Due to the ecological plasticity of this species, we expected that habitat amount and fragmentation would not have a marked effect on the species’ occupancy or intensity of use or would have a positive effect. Based on previous work (Dias and Bocchiglieri 2016; Ferreguetti et al. 2017), we expected the species would show a preference for more open habitats. Being an omnivorous mesopredator, we expected C. thous would take advantage of resources of anthropogenic origin (i.e., fruit tree plantations, garbage, rats), but would respond negatively to environments with high rates of chronic anthropogenic disturbance caused by roads, due to vehicle collisions, and conflicts with farmers and domestic dogs (Beisiegel et al. 2013; Bickley et al. 2019; Monteiro-Alves et al. 2019). Finally, we expected that the activity pattern of C. thous would be mostly nocturnal, in line with activity periods reported in the literature (Faria-Corrêa et al. 2009; Bianchi et al. 2016), but that it could be modulated according to resource availability and to avoid conflict with human populations.
Material and methods
Study area
Caatinga is the largest seasonally dry tropical forest in the Neotropics, characterized by high temperatures (mean = 26 °C) and low precipitation (mean = 773 mm) that is concentrated in 3–4 months (Silva and Barbosa 2017; Andrade et al. 2017). Originally the Caatinga occupied 826.411 km2, but now less than 50% is left, with the remaining vegetation scattered across 47.100 fragments (Antongiovanni et al. 2018). Landscape connectivity is still relatively high, however 75% of the remaining Caatinga area is within 1 km of the forest edge (Antongiovanni et al. 2018). Of the 27.6 million people residing in this phytogeographic domain, 44% live in rural areas and part of this population exhibit total or partial direct dependence on natural resources, causing continuous extraction of plant (e.g., wood, medicine) and animal resources (Dias et al. 2019a; Specht et al. 2019; Albuquerque et al. 2018). Extensive livestock (i.e., cattle, goats, and sheep) are widely practiced in the region, and wood extraction and the use of fire are frequent for domestic use and for the supply of charcoal for an expressive ceramic industry (Albuquerque et al. 2018). In addition, the region has many municipal headquarters and a dense network of paved and unpaved roads. All these factors mean that most Caatinga fragments are subjected to high rates of chronic anthropogenic disturbance (Ribeiro et al. 2015; Câmara et al. 2019; Antongiovanni et al. 2020).
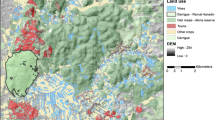
The study was conducted in ten Caatinga areas of the State of Rio Grande do Norte (Brazil) located within or near regions considered priority regions for biodiversity conservation by the Brazilian Ministry of Environment for containing threatened species, particular habitats, or other important conservation targets (MMA 2018, Fig. 1). Some areas are located in coastal and lowland regions, while others are at higher and steeper altitudes (Marinho et al. 2018b). The vegetation physiognomy varies from forests, with a predominance of continuous canopy, savanna with shrubby-arboreal vegetation that has a semi-continuous canopy, and grassland formation, with open shrubby vegetation with the dominance of herbaceous species (Silva and Souza 2018; Mapbiomas Project).

Priority areas for biodiversity conservation of the Caatinga in the state of Rio Grande do Norte (light grey areas) and the location of the camera trap stations (black dots). The letters represent the names of the priority areas: SS – Serra de Santana, LA – Lajes, CC – Cerro Corá, MA – Martins, SP – Serrinha dos Pintos, FG – Felipe Guerra, CN − Caiçara do Norte, LG – Luís Gomes, DR – Dunas do Rosado, CE – Coronel Ezequiel
Sample design
Data collection occurred between May and September 2014. In each of the 10 areas, 20 camera-traps (Bushnell® Trophy Cam™) were installed, positioned between 30–40 cm from the ground, which remained active 24 h per day for an average of 38 days (± 9 days). In total, the sampling effort was 6,701 camera.days for 179 sampling points, due to field problems and limitations. Thus, total sampling effort is simply the sum of days the set of camera traps used in the study were in operation for 24 h. The cameras, activated by heat and movement, were programmed so that in each photographic record three sequential photos with date and time stamp were taken, maintaining a minimum interval of five minutes between consecutive records. However, C. thous records were considered independent if spaced at least one hour apart, with records taken within this time counted as a single record. To minimize spatial dependence, cameras were positioned at a minimum distance of 1 km from each other, with the exception of sites with difficult access that precluded this standardization (average of 1.6 km). To increase the detection of individuals, the sites chosen for installation of the cameras included trails made by people or by farm animals, abandoned roads, and intermittent riverbeds (Srbek-Araujo and Chiarello 2013). Baits were not used. Data screening was performed with the camtrapR package in R software (Niedballa et al. 2016). More details about the study area and the sampling design can be obtained in Marinho et al. (2018c).
Explanatory variables
Habitat amount, defined as the percentage of native habitat cover in the buffer, was estimated from the annual mapping project of land use and land cover in Brazil—MapBiomas Collection 5 (MapBiomas Project n.d., https://mapbiomas.org) for the sampling year, and was calculated using ArcGis software (ESRI 2011). Subsequently, habitat amount was subdivided into three physiognomic classes (forest, savanna, and grassland formation) to assess whether C. thous responds differently to these different habitat classes, as suggested by Fahrig (2013).
Edge density, the measure chosen to represent the fragmentation process, was calculated by the ratio between the linear measurement of the edge (m) and the area of natural habitat (ha) in the buffer (considering the sum of the three habitat classes, forest, savannah and grassland), estimated using ArcGis software (ESRI 2011).
The chronic anthropogenic disturbance index (CDI) was estimated for all pixels (30 × 30 m) of native Caatinga vegetation (Antongiovanni et al. 2020). This index was calculated using primary variables representing five disturbance vectors: human population density, infrastructure, grazing pressure, logging, and fire. The variables considered in each vector were (a) human population: human population density, distance to settlements and urban localities; (b) infrastructure: distance to paved and unpaved roads, transposition canals, wind farms, and railroads; (c) grazing: density of sheep, goats, and cattle; (d) logging: distance to charcoal-based industries; and (e) fire: fire density. For more details see Antongiovanni et al. (2020). In this study, we averaged the Chronic Disturbance Index (CDI) and its five vectors for all natural vegetation pixels in each landscape analyzed.
The mean altitude (hereafter altitude) and rugosity (measured by the coefficient of variation of altitude) were extracted from the data made available by the Shuttle Radar Topography Mission (SRTM). The frequency distribution of all explanatory variables and the correlation matrix between variables are shown in Figures S1, S2, S3 and S4.
For sensitivity analyses, all variables were extracted for 800, 1600, and 3200 m buffers around each camera trap.
Statistical analyses
Occupancy analyses
The occupancy analyses of Cerdocyon thous were performed in two complementary steps: main model and extended model. For the main model, the landscape associated with each of the camera traps was characterized by five explanatory variables: habitat amount (%), edge density (m/ha, representing the level of landscape fragmentation), chronic anthropogenic disturbance index (0 ≤ CDI ≤ 1), mean altitude (m), and rugosity (m/ha). For the extended model, habitat amount was replaced by the availability of its three physiognomies (forest, savanna, and grassland formation) while the chronic anthropogenic disturbance index (CDI) was replaced by its five vectors (human population, infrastructure, grazing pressure, logging, and fire).
The probability of occupancy (ψ) of C. thous was estimated by the single-season model after the incorporation of detectability (p) estimates (Mackenzie et al. 2002; Heiniger et al. 2020), the analyses been performed in Mark version 9.0 (Program Mark 2023; Cooch and White 2023). For these analyses we divided the sampling period into 14 occasions of 5 days each, with each trap being considered an independent sampling unit. Initially, we performed a sensitivity analysis to evaluate which landscape size would be the most appropriate to perform the occupancy analyses. To do so, we used the main model for occupancy at three spatial scales, corresponding to the average distance between camera traps (1600 m), half (800 m) and double (3200 m) this value, in order to ensure some degree of independence among samples. As the 800 m scale was the best ranked, according to Akaike's Information Criterion, all further analyses were performed at this scale (Table S1).
Detectability was modeled using sampling effort (Effort) and tree density (TD) in the main model. Sampling effort was defined simply by the number of days each camera was in operation, while tree density (individuals/ha) was estimated by the number of trees (dbh ≥ 5 cm) on a 5 × 20 m transect established at the sampling point. As both variables proved important in determining detectability (ΔAICc < 2), these variables were fixed in all subsequent occupancy models (Table S2).
Subsequently model selection for the Cerdocyon thous occupancy was performed between the main occupancy model (five explanatory variables) and all sub-models generated from their combinations, which produced 31 alternative models (including the null model). Additionally, model selection was also performed for the extended model, containing eleven explanatory variables and all 2047 submodels generated from their combinations (including the null model).
In the Program Mark, model selection starts by calculating the AICc of each candidate model and sorting them from the smallest to the largest AICc, thus, the most parsimonious on the top. Subsequently, the Akaike weight of each model is calculated as an index of relative plausibility (i.e. higher weight, higher plausibility). In both the main and extended analyses, the selected models were those with ΔAICc < 2 (Burnham and Anderson 2002). There are alternative ways to perform model synthesis in order to minimize interpretation errors, when there is not just one model with an Akaike weight ≥ 0.90 (Arnold 2010). For this work, we have performed model average, for the estimation of occupancy and detection parameters, as the weighted mean of the parameters, considering the subset of best models which together accumulated 0.9999 of Akaike weights, disregarding the lesser-fit models (Arnold 2010). To evaluate the effect of the variables, we used the value of the beta of each variable in the best ranked model in which it was inserted, considering only models with ΔAICc ≤ 2.
To measure model fit, we performed the overdispersion test (c-hat; n = 10.000 bootstraps) using the most parametrized model (MacKenzie and Bailey 2004). Results with values > 1 indicate overdispersion of the data, and the associated AICc adjustment is required, while values < 1, suggest underdispersion, however they do not represent a problem for the analysis and no adjustment is required (MacKenzie and Bailey 2004; Marinho et al. 2018a).
Analysis of use intensity
The number of independent records of Cerdocyon thous per camera trap, controlled by sampling effort (camera.days) as explanatory variable, was used as a proxy for intensity of use, combining population density, activity level, and other behavioral aspects. Besides, since tree density was shown to affect detectability in the previous analyses, besides sampling effort, tree density was also fixed as the covariate in all models. The relative strength of landscape variables on the number of records of Cerdocyon thous was evaluated with generalized linear models (GLM), with Poisson error, for both the main model and the extended model. From the full model a search for the minimum appropriate model was performed, using the procedure proposed by Crawley (2013). In this simplification procedure (top-down), the AICc of models of the same structural complexity is compared in order to eliminate the variable that does not add explanatory power. The minimum adequate model is obtained when all remaining explanatory variables are significant (p < 0.05). GLM analysis was performed in R software.
Daily activity pattern analysis
To analyze the daily activity pattern of C. thous, and understand how spatial variations in the landscape alter these patterns, all independent records obtained over the five months of the study (May to September 2014) were pooled, as there is evidence that the daily activity of the species in the region does not vary between seasons (Marinho et al. 2020). For further standardization, the times of the records were converted to radians and transformed to solar time (Chen et al. 2019) using the function sunTime from the overlap package in R software (Meredith and Ridout 2014). For general classification of activity pattern, records were classified into diurnal (1 h after sunrise to 1 h before sunset), nocturnal (1 h after sunset to 1 h before sunrise), and crepuscular (1 h before and after sunrise and sunset) (Massara et al. 2018; Villafañe-Trujillo et al. 2021). To test whether C. thous activity was evenly distributed over the 24 h of the day we applied Rao's spacing (U) test, using the circular package in R software (Lund et al. 2017).
Characterization of the overall pattern of daily activity of C. thous was performed based on the records through a kernel density curve using the overlap package in R software (Meredith and Ridout 2014). To test whether the daily activity pattern of C. thous varied depending on landscape characteristics, we divided the continuous explanatory variables (e.g., habitat amount, edge density, CDI, altitude, and rugosity) into categorical ones with two levels based on their medians (i.e., high – above the median and low – below the median), Table S3). For each variable, a kernel curve was produced for each of the levels and the mean overlap coefficient (Δ4) for large samples (Ridout and Linkie 2008) was estimated using the overlap package in R software (Meredith and Ridout 2014). The Δ4 estimator ranges from zero (no overlap) to one (full overlap). To estimate the confidence interval (CI) and the average Δ4 coefficient we used bootstrapping with 10.000 repetitions. To test whether the daily activity pattern was statistically different for each variable between the low and high categories, we applied Watson's two-sample homogeneity estimation (U2) test using the circular package (Lund et al. 2017) in R software.
Results
Occupancy
In total, we obtained 670 independent records of the crab-eating fox Cerdocyon thous. The naïve occupancy for the species, that is, the proportion of the camera traps in which the crab-eating fox was detected, was 0.71. The estimated occupancy was 0.71 ± 0.03 (EP) and 0.73 ± 0.04 for the main and extended analysis, respectively, after correction for imperfect detection. The species detection rate was 0.39 ± 0.01, for both models. The overdispersion test indicated no need for AICc adjustment (c-hat = 0.72, p = 0.81).
In the main occupancy analysis, four models showed ΔAICc < 2 (Table 1). The best model included only the covariates altitude and rugosity (AICc = 0). Habitat amount, however, entered the next three models. The sum of the weights (W +) of altitude (0.68) and rugosity (0.67) are larger, while the sum of habitat amount (0.48) was marginally smaller than 0.50. When we consider the weighted betas, it is observed that increasing altitude, rugosity and habitat amount negatively affected the occupancy probability of C. thous, with the confidence intervals of the three betas not overlapping zero (Fig. 2A).

Weight betas and their 95% confidence interval for the (A) main and (B) extended analyses modelling the occupancy and (C) main and (D) extended analyses of number of records of Cerdocyon thous in altered landscapes of a seasonally dry tropical forest. Confidence interval overlapping and not overlapping with zero are in red and black, respectively
In the extended analysis, three models obtained ΔAICc < 2 (Table 1). The covariates present in the best model (AICc = 0) were: altitude, rugosity, forest availability, and the vectors human population and grazing pressure. The variables altitude, human population and grazing pressure were present in all three models, and forest and rugosity in two. The sum of the weights (W +) of explanatory variables was highest for forest availability (0.87), human population (0.85), rugosity (0.67), altitude (0.63), and grazing pressure (0.61), all above the 0.50 threshold. The weighted betas indicate that the occupancy probability of C. thous decreased with altitude, rugosity, and forest availability, but increased with the vectors human population and grazing intensity (Fig. 2B).
Use intensity
The number of records of C. thous per camera trap was highly skewed, varying from 0 to 30, with a median of 2 records (Figure S5). The minimum model for the main analysis of number of records included the variables altitude, rugosity, edge density, and chronic anthropogenic disturbance index, but not the variable habitat amount (Table 2). The number of records increased with edge density in the landscape and chronic anthropogenic disturbance but decreased with altitude and rugosity (Fig. 2C). For the extended analysis, the minimum model retained all covariates tested, except the availability of grassland (Table 2). The variables savanna availability, edge density, human population, and grazing pressure positively affected the number of records of C. thous, while the variables altitude, rugosity, forest availability, infrastructure, logging, and burning negatively affected it (Fig. 2D).
Activity pattern
The activity pattern of C. thous was not evenly distributed throughout the 24 h of the day (U = 166.43, p < 0.05; Fig. 3A). Considering the entire sampling period, the species showed 55% of activity records during the night, 32% during the twilight period, and only 13% during the day, presenting a nocturnal-crepuscular activity pattern (Tables S4 and S5). The curve of the general activity pattern of the species indicates activity throughout the night period, with two well-demarcated activity peaks, one after sunrise, around 7 am, and another in the evening period, around 9 pm (Fig. 3A).

Kernel density curves for the general daily activity patterns of Cerdocyon thous in a tropical dry forest: A general activity pattern, B pattern considering habitat availability, C edge density, D chronic anthropic disturbance, E human density, and F grazing. Continuous lines represent high levels, while dashed lines represent low levels of each variable. The area in light gray represents activity overlap. The mean value of the overlap coefficient (Δ) is shown followed by the confidence interval (CI). *p < 0.05. Sunrise and sunset times correspond to 6:02 am and 5:52 pm legal time, respectively
The daily activity pattern of C. thous varied significantly between sites with low and high habitat amount (U2 = 0.26, p < 0.05), despite high overlap (Δ = 0.88 [CI:0.84–0.94]; Fig. 3B). At the points with low habitat amount, C. thous activity was lower during the night, but showed a sharper peak of activity just after 6 am (Fig. 3B). The daily activity pattern was similar between levels of forest availability (Δ = 0.78; CI = 0.71—0.91; U2 = 0.17, p > 0.05; Figure S6A), savanna (Δ = 0.90; CI = 0.87—0.96; U2 = 0.15; p > 0.10; Figure S6B), and grassland formation (Δ = 0.87; CI = 0.84—0.94; U2 = 0.11; p > 0.10; Figure S6C). Furthermore, there was a high overlap in the daily activity pattern of C. thous between areas with low and high edge density (Δ = 0.91; CI = 0.92—0.97), and the patterns were similar (U2 = 0.02, p > 0.10; Fig. 3C).
Sites containing habitats with low and high chronic anthropogenic disturbance index showed similar and not significantly different activity patterns (Δ = 0.91; CI = 0.90—0.97; U2 = 0.05; p > 0.10; Fig. 3D). However, the activity pattern of C. thous differed significantly between sites with low and high human density (Δ = 0.87; CI = 0.82—0.93; U2 = 0.1879, p < 0.05, Fig. 3E). C. thous activity at sites with lower human density was more constant throughout the night, dropping off after twilight and not showing a well-defined peak of activity in any period. In contrast, at sites with high human density, C. thous shows a well-delimited peak of activity around 7 am and another between 9—10 pm. The daily activity pattern of C. thous also differed significantly between sites with low and high grazing intensity, despite the high overlap (Δ = 0.86; CI = 0.80—0.91, U2 = 0.39, p < 0.01; Fig. 3F). In areas with lower grazing activity, we observed activity peaks around 7 am and another between 9—10 pm. While in sites with more grazing, not very pronounced activity peaks are observed. Finally, the activity patterns of C. thous showed high overlap coefficients and did not exhibit significant differences between the different levels of the infrastructure (Δ = 0. 91; CI:0.92—0.97; U2 = 0.0478, p > 0.10; Figure S7A), logging (Δ = 0.89; CI = 0.85—0.95; U2 = 0.05; p > 0.10; Figure S7B), and fire density (Δ = 0.87; CI = 0.81- 0.92; U2 = 0.18; p > 0.05; Figure S7C).
Regarding topographic variations, for altitude we obtained a significant difference between C. thous activity between sites at higher and lower altitude, despite the high overlap (Δ = 0.88; CI: 0.83—0.94; U2 = 0.24, p < 0.05; Figure S8A). While for sites with higher and lower rugosity, the overlap was high and there was no significant difference (Δ = 0.91; CI: 0.83—0.94; U2 = 0.08, p > 0.10; Figure S8B).
Discussion
The occurrence, intensity of use, and daily activity patterns of the crab-eating fox Cerdocyon thous were affected by landscape anthropization. C. thous is favored by the presence of savanna vegetation, fragmentation, and by higher density of humans and cattle, but it avoids areas with high incidence of fire, logging and infrastructure. It also preferred the lowlands areas rather than the Caatinga highlands. Furthermore, the crab-eating fox modulates its activity schedules depending on the percentage of natural habitat in the landscape (i.e. habitat amount), human presence, livestock and altitude. The ecological flexibility of this generalist mesocarnivore, associated with the availability of habitats and resources of anthropogenic origin, seems to be fundamental to explain its regional population success. These results help us understand why omnivorous generalist species are becoming the most dominant species of mammal communities in the Anthropocene.
Habitat amount negatively influenced the occupancy of C. thous, suggesting that the anthropogenic matrix is offering new resources and habitats that favor the occurrence of the species. C. thous is considered a habitat generalist species, having been recorded in diverse environments such as ombrophilous, deciduous and semideciduous forests, gallery forests, dry forests, savannas, floodplains, mangroves, and agricultural areas (Beisiegel et al. 2013; Ferreguetti et al. 2017). However, in our study conducted in a seasonally dry tropical forest, the availability of forest habitats had a negative effect on both the probability of occurrence and the intensity of use of C. thous in Caatinga, while the availability of savanna had a positive effect on it. This pattern, however, cannot be generalized to other regions. In the Paraguayan Chaco, the occupancy probability of C. thous was not affected by variation in forest cover (Weiler et al. 2020). Furthermore, previous work has reported some level of dependence of the species on forest habitats, such as riparian forest, sometimes for shelter (Facure et al. 2003; Freitas et al. 2015). The generalist habit of C. thous allows it to mold itself to local situations to find resources and suitable conditions for its survival in different habitats.
In sites with less habitat amount, that is, with a greater predominance of anthropogenic environments, C. thous showed less nocturnal activity and a higher peak of activity in the early morning. In contrast, C. thous did not change its daily activity pattern in relation to the natural vegetation types, showing the same temporal strategy in sites with a higher or lower predominance of forest, savanna or grassland formation. These results suggest that C. thous is modifying its behavior in the anthropogenic environment, perhaps associated with the use of some resource of anthropogenic origin. However, changes in daily activities may also be associated with strategies to coexist with potential competitors (Nagy-Reis et al. 2019; Marinho et al. 2020). Interestingly, and contrary to what has been suggested for most mammals (Gaynor et al. 2018), it does not seem to be becoming more nocturnal in anthropized sites of Caatinga.
In contrast to what was suggested by Fahrig (2013), edge density positively affected the intensity of use of C. thous in the Caatinga, even after we controlled for the amount of habitat (notice that habitat amount and edge density are fairly independent in our landscape, r = -0.22). Indeed, previous studies have reported that C. thous is frequently found in edge areas (Dias and Bocchiglieri 2016; Silva et al. 2020). This result suggests habitat complementarity. Possibly, the crab-eating fox is finding certain resources in the anthropic matrix and other resources or shelter in the native habitat, benefiting from this ecotone. In contrast, the daily activity pattern of C. thous was not significantly affected by edge density, indicating that its behavior is more sensitive to the natural/anthropogenic habitat dichotomy than to particularities of the fragmentation process. This reinforces the habitat complementary hypothesis. Thus, C. thous maintains its temporal strategy relatively unchanged independently of the fragmentation pattern probably due to its great capacity for displacement thought the anthropogenic matrix (Macdonald and Courtenay 1996; Courtenay and Maffei 2004).
The chronic anthropogenic disturbance index positively affected the intensity of use by C. thous. Human density and grazing intensity were responsible for this positive effect, also influencing the occupancy and activity pattern of the species. Some generalist species increase their population density in landscapes impacted by human activities, either by taking advantage of anthropically sourced resources or by releasing predation and competition pressure relative to other species in the carnivore guild, which may become locally extinct due to disturbance and illegal hunting activities (Ritchie and Johnson 2009; Rodriguez et al. 2021). In the Caatinga, the availability of fruits, insects and even small prey presents large seasonal fluctuations due to the semi-arid climate, while anthropogenic environments may represent a more stable source of resources (e.g., exotic fruits, irrigated crops, organic waste, rats), causing C. thous, despite conflicts, to approach areas with higher human populations (Moura 2007; Ferraz et al. 2010). A similar pattern was found for groups of the mesocarnivorous Caracal caracal in South Africa. Individuals stayed close to urban centers because of the resources they could obtain despite being exposed to greater risks (Serieys et al. 2021).
Works related to the diet of C. thous in the Caatinga are still scarce, but those that have been conducted indicate higher consumption of arthropods, fruits, and small vertebrates (Olmos 1993; Dias and Bocchiglieri 2016; Souza 2019). In areas with higher anthropogenic pressure, Souza (2019) found a decrease in arthropod consumption and an increase in rodent consumption. Rodents may be attracted due to grain cultivation or even the presence of invasive species like algaroba (Prosopis juliflora), an exotic plant used for cattle and goat feed (Souza 2019). Approaching anthropic sites to benefit from food resources would also explain its activity pattern. In sites with higher human density, the activity peaks of C. thous were in the early morning and evening, coinciding with the beginning and closing of human activities. On the other hand, this proximity and use of anthropic resources puts the species in contact with garbage and other materials that can affect the health of the animals and contaminate the food chain (Bocchiglieri et al. 2021).
Areas with higher grazing intensity, including cattle, sheep and goats, had higher occupancy and intensity of use by C. thous. Possibly cattle feces attract a diversity of insects, mainly scavengers but also other decomposer invertebrates, which are an important component of the diet of C. thous (Bossi et al. 2019; Dias et al. 2019b). In addition to this, soil compaction by cattle and the elimination of vegetation makes the environment more conducive for prey hunting (Dias et al. 2019a). Another mechanism that could explain its higher occurrence and intensity of use of C. thous in areas of higher grazing intensity would be the release of mesopredators, as the presence of cattle together with people and grazing dogs would inhibit the approach of predators and competitors, such as puma (Puma concolor) and other wild cats (Greco et al. 2021). The C. thous’s activity pattern was also affected by grazing pressure, with nocturnal activity being more uniform on sites with higher cattle, sheep, and goat densities. The nearly constant activity pattern in areas with higher grazing intensity suggests that in these areas the availability of prey insects associated with feces would be more constant throughout the night. In sites with less grazing intensity, and more preserved, the activity peaks of C. thous in the early morning and afternoon could be associated with the activity peaks of its preferred prey (Marinho et al. 2020).
The vectors infrastructure, logging and fire, had a negative relationship with the intensity of use by C. thous, indicating that even this generalist species suffers clear impacts with some aspects of anthropization. One of the main variables contained in the infrastructure vector are paved and unpaved roads, railway lines, transmission lines and wind turbines, which are also associated with access roads and maintenance. Our results suggest that roads are acting as a sink for the C. thous population, since they frequently use roads for displacement and carcass feeding, making the species the most frequently found mammal in road kill surveys (Beisiegel et al. 2013; Freitas et al. 2015; Calabuig et al. 2020). In addition, roads represent entry points for hunters with their hunting dogs, which can exacerbate conflicts. The negative relationship of C. thous with logging and fire may be associated with decreased productivity, which affects fruit production, insect populations, loss of refuge sites, and changes in the faunal community (Fredericksen and Fredericksen 2002; Kutt and Woinarski 2007).
Regarding topographic variables, the negative relationship between altitude and roughness with occupancy and frequency of use by C. thous corroborates previous results, which indicate that the species is tolerant to and prefers anthropized habitats. The activity pattern of the species in habitats located at lower altitude showed a peak activity in the morning, contrasting with the more intense nocturnal activity in habitats of higher altitude. As previously mentioned, the crab-eating fox can take advantage of foods of anthropic origin (Pires and Galetti 2022) which would explain this pattern. However, in areas of higher altitude and, in general, more preserved habitats, the species would have adapted and its peak nocturnal activity would coincide with its prey (Marinho et al. 2020).
In the Antropocene, many mammal populations are declining or becoming locally extinct, leading to impoverished communities. Top predators are being actively persecuted due to fear and conflict due to their use of man-raised exotic species, such as cattle, sheep, and goats (Ritchie and Johnson 2009). More specialist species are suffering from habitat loss, fragmentation, degradation and resource decline. However, the population of some generalist species, such as mesocarnivores, is increasing, becoming dominant species in many communities where top predators are absent, as already reported for the Brazilian Atlantic Forest (Ritchie and Johnson 2009; Graves et al. 2021). Those species seem to be able not only to tolerate the anthropogenic changes but they are able to profit on the new habitats and new resources now at hand. However, the disproportionate increase in mesopredators can have negative implications on predator–prey dynamics, besides intensely interfering in plant formation, resulting in a biotic homogenization of fauna and flora (Pires and Galetti 2022). Human health and financial impact also need to be considered, since communities dominated by mesopredators may have more episodes of disease outbreaks (Pires and Galetti 2022). Cerdocyon thous is becoming one of the dominant species in the largest seasonally dry tropical forests of the Neotropics, gaining importance as seed disperser, prey control, and vector of diseases. Our results suggest that habitat and resource complementarity is a key feature in such success. Further studies performed with generalist mesopredators can help us to predict how mammal communities will be structured with the advance of the Anthropocene.
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Albuquerque UP et al (2018) Humans as niche constructors: revisiting the concept of chronic anthropogenic disturbances in ecology. Perspect Ecol Conserv 16(1):1–11. https://doi.org/10.1016/j.pecon.2017.08.006
Andrade EM, Aquino DN, Chaves LCG, Lopes FB (2017) Water as capital and its uses in the Caatinga. In: Caatinga. [s.l.], vol 1. Springer, pp 281–302. https://doi.org/10.1007/978-3-319-68339-3_10
Antongiovanni M, Venticinque EM, Fonseca CR (2018) Fragmentation patterns of the Caatinga drylands. Landsc Ecol 33(8):1353–1367. https://doi.org/10.1007/s10980-018-0672-6
Antongiovanni M et al (2020) Chronic anthropogenic disturbance on Caatinga dry forest fragments. J Appl Ecol 57(10):2064–2074. https://doi.org/10.1111/1365-2664.13686
Arnold TW (2010) Uninformative parameters and model selection using Akaike’s information criterion. J Wildl Manag 74(6):1175–1178
Beisiegel BM et al (2013) Avaliação do risco de extinção do Cachorro-do-mato Cerdocyon thous (Linnaeus, 1766) no Brasil. Biodiversidade Bras-BioBrasil 1:138–145. https://doi.org/10.37002/biobrasil.v/25vi/25i.380
Bianchi RDC, Olifiers N, Gompper ME, Mourão G (2016) Niche partitioning among mesocarnivores in a Brazilian wetland. PLoS One 11(9):e0162893. https://doi.org/10.1371/journal.pone.0162893
Bickley SM et al (2019) Human perceptions of and interactions with wild canids on cattle ranches in central Brazil. Oryx 54(4):546–553. https://doi.org/10.1017/S0030605318000480
Bocchiglieri A, Bezerra RH, Conceição AM (2021) First record of plastic ingestion by Cerdocyon thous (Carnivora, Canidae) in northeastern Brazil. Notas Sobre Mamíferos Sudamericanos 3. https://doi.org/10.31687/saremNMS.21.7
Bossi MAS, Migliorini RP, Santos TG, Kasper CB (2019) Comparative trophic ecology of two sympatric canids in the Brazilian Pampa. J Zool 307(3):215–222. https://doi.org/10.1111/jzo.12636
Bueno AS, Peres CA (2019) Patch - scale biodiversity retention in fragmented landscapes: reconciling the habitat amount hypothesis with the island biogeography theory. J Biogeogr 46(3):621–632. https://doi.org/10.1111/jbi.13499
Burnham KP, Anderson DR (2002) Model selection and multimodel inference: a practical information - theoretic approach, 2nd edn. Springer, New York
Calabuig C, Dantas A, Katzenberger M, Souza H, Sombra C, Megid J, de Paula Antunes JMA (2020) Assessment of rabies and canine distemper viruses in road-killed wildlife mammals from the semiarid region of Northeastern Brazil. Trop Conserv Sci 12(1). https://doi.org/10.1177/1940082919875446
Câmara T et al (2019) Anthropogenic disturbance and rainfall variation threaten the stability of plant–ant interactions in the Brazilian Caatinga. Ecography 42(11):1960–1972. https://doi.org/10.1111/ecog.04531
Caro T, Rowe Z, Berger J, Wholey P, Dobson A (2022) An inconvenient misconception: climate change is not the principal driver of biodiversity loss. Conserv Lett 15(3):e12868. https://doi.org/10.1111/conl.12868
Chen Y et al (2019) Activity rhythms of coexisting red serow and Chinese serow at Mt. Gaoligong as identified by camera traps. Animals 9(12):1071. https://doi.org/10.3390/ani9121071
Cooch EG, White GC (2023) Program Mark. A gentle introduction, 13th edn. Available at: http://www.phidot.org/software/mark/docs/book/. Accessed Sep 2021
Courtenay O, Maffei L (2004) South America (Neotropical): crab-eating fox Cerdocyon thous (Linnaeus, 1766) least concern (2004). In: Sillero- Zubiri C, Hoffmann M, Macdonald DW (eds) Canids: foxes, wolves, jackals and dogs. Status survey and conservation action plan. IUCN/SSC Canid Specialist Group, Gland, Switzerland and Cambridge, UK, pp 32–38
Crawley MJ (2013) The R book, 2nd edn. Wiley
Crooks KR et al (2017) Quantification of habitat fragmentation reveals extinction risk in terrestrial mammals. Proc Natl Acad Sci U S A 114(29):7635–7640.https://doi.org/10.1073/pnas.1705769114
Dias DM, Bocchiglieri A (2016) Trophic and spatio-temporal niche of the crab-eating fox, Cerdocyon thous (Linnaeus, 1766) (Carnivora: Canidae), in a remnant of the Caatinga in northeastern Brazil. Mammalia 80(3):281–291
Dias DM, Massara RL, Bocchiglieri A (2019a) Use of habitats by donkeys and cattle within a protected area of the Caatinga dry forest biome in northeastern Brazil. Perspect Ecol Conserv 17(2):64–70. https://doi.org/10.1016/j.pecon.2019.04.005
Dias DM, Massara RL, Campos CB, Rodrigues FHG (2019b) Human activities influence the occupancy probability of mammalian carnivores in the Brazilian Caatinga. Biotropica 51(2):253–265. https://doi.org/10.1111/btp.12628
ESRI (2011) ArcGIS desktop: release 10. Environmental systems research institute, Redlands. https://www.esri.com/pt-br/home. Accessed Feb 2021
Evju M, Sverdrup-Thygeson A (2016) Spatial configuration matters: a test of the habitat amount hypothesis for plants in calcareous grasslands. Landsc Ecol 31:1891–1902. https://doi.org/10.1007/s10980-016-0405-7
Ewers RM et al (2013) Using landscape history to predict biodiversity patterns in fragmented landscapes. Ecol Lett 16(10):1221–1233. https://doi.org/10.1007/s10980-016-0405-7
Facure KG, Giaretta AA, Monteiro-Filho ELA (2003) Food habits of the crab-eating-fox, Cerdocyon thous, in an altitudinal forest of the Mantiqueira Range, southeastern Brazil. Mammalia 1(4):503–511. https://doi.org/10.1515/mamm-2003-0404
Fahrig L (2013) Rethinking patch size and isolation effects: the habitat amount hypothesis. J Biogeogr 40(9):1649–1663
Fahrig L (2017) Ecological responses to habitat fragmentation per se. Annu Rev Ecol Evol Syst 48:1–23. https://doi.org/10.1146/annurev-ecolsys-110316-022612
Faria-Corrêa M et al (2009) Activity, habitat use, density, and reproductive biology of the crab-eating fox (Cerdocyon thous) and comparison with the pampas fox (Lycalopex gymnocercus) in a Restinga area in the southern Brazilian Atlantic Forest. Mamm Biol 74(3):220–229. https://doi.org/10.1016/j.mambio.2008.12.005
Ferraz KMPMB et al (2010) Assessment of Cerdocyon thous distribution in an agricultural mosaic, southeastern Brazil. Mammalia 74(3):275–280. https://doi.org/10.1515/mamm.2010.036
Ferreguetti AC, Tomas WM, Bergallo HG (2017) Differences in the Mammalian habitat use in a Mosaic of vegetation types of an Atlantic rain-forest reserve, Brazil. Mastozoología Neotropical 24(2):355–364
Fischer J, Lindenmayer DB (2007) Landscape modification and habitat fragmentation: a synthesis. Glob Ecol Biogeogr 16(3):265–280. https://doi.org/10.1111/j.1466-8238.2007.00287.x
Fredericksen NJ, Fredericksen TS (2002) Terrestrial wildlife responses to logging and fire in a Bolivian tropical humid forest. Biodivers Conserv 11(1):27–38. https://doi.org/10.1023/A:1014065510554
Freitas SR et al (2015) How landscape features influence roadkill of three species of mammals in the Brazilian savanna? Oecol Austr 18:35–45. https://doi.org/10.4257/oeco.2014.18.05
Gardiner R et al (2018) Habitat amount and quality, not patch size, determine persistence of a woodland-dependent mammal in an agricultural landscape. Landsc Ecol 33(11):1837–1849. https://doi.org/10.1007/s10980-018-0722-0
Garmendia A et al (2013) Landscape and patch attributes impacting medium-and large-sized terrestrial mammals in a fragmented rain forest. J Trop Ecol 29(4):331–344. https://doi.org/10.1017/S0266467413000370
Gaynor KM, Hojnowski CE, Carter NH, Brashares JS (2018) The influence of human disturbance on wildlife nocturnality. Science 360(6394):1232–1235. https://doi.org/10.1126/science.aar7121
Graves V, Tirelli F, Horn P, Resende L, Bolze G, Dutra J, ... Pereira MJ (2021) Impact of anthropogenic factors on occupancy and abundance of carnivorans in the Austral Atlantic forest. J Nat Conserv 59:125951. https://doi.org/10.1016/j.jnc.2020.125951
Greco I et al (2021) Spatio‐temporal occurrence and sensitivity to livestock husbandry of Pallas's cat in the Mongolian Altai. J Wildl Manag 1–16. https://doi.org/10.1002/jwmg.22150
Haddad NM et al (2017) Experimental evidence does not support the habitat amount hypothesis. Ecography 40(1):48–55. https://doi.org/10.1111/ecog.02535
Heiniger J, Davies HF, Gillespie GR (2020) Status of mammals on Groote Eylandt: Safe haven or slow burn? Austral Ecol 45(6):759–772. https://doi.org/10.1111/aec.12892
Hody AW et al (2019) Canid collision — expanding populations of coyotes (Canis latrans) and crab-eating foxes (Cerdocyon thous) meet up in Panama. J Mammal 100(6):1819–1830. https://doi.org/10.1093/jmammal/gyz158
Kutt AS, Woinarski JCZ (2007) The effects of grazing and fire on vegetation and the vertebrate assemblage in a tropical savanna woodland in north-eastern Australia. J Trop Ecol 23(1):95–106. https://doi.org/10.1017/S0266467406003579
Lima DO et al (2021) Anthropogenic effects on the occurrence of medium-sized mammals on the Brazilian Pampa biome. Anim Conserv 24(1):135–147. https://doi.org/10.1111/acv.12618
Lund U, Agostinelli C, Agostinelli MC (2017) Package ‘circular’. R project. https://cran.r-project.org/web/packages/circular/circular.pdf. Accessed Nov 2021
Macdonald DW, Courtenay O (1996) Enduring social relationships in a population of crab-eating zorros, Cerdocyon thous, in Amazonian Brazil (Carnivora, Canidae). J Zool 239(2):329–355. https://doi.org/10.1111/j.1469-7998.1996.tb05454.x
Mackenzie DI et al (2002) Estimating site occupancy rates when detection probabilities are less than one. Ecology 83(8):2248–2255. https://doi.org/10.1890/0012-9658(2002)083[2248:ESORWD]2.0.CO;2
MacKenzie DI, Bailey LL (2004) Assessing the fit of site-occupancy models. J Agric Biol Environ Stat 9(3):300–318. https://doi.org/10.1198/108571104X3361
Magioli M et al (2021) Land-use changes lead to functional loss of terrestrial mammals in a Neotropical rainforest. Perspect Ecol Conserv 19:161–170. https://doi.org/10.1016/j.pecon.2021.02.006
Marinho PH et al (2018a) Estimating occupancy of the vulnerable northern tiger cat Leopardus tigrinus in Caatinga drylands. Mammal Res 63(1):33–42. https://doi.org/10.1007/s13364-017-0330-4
Marinho PH et al (2018b) Activity patterns of the threatened northern tiger cat Leopardus tigrinus and its potential prey in a Brazilian dry tropical forest. Mamm Biol 89:30–36. https://doi.org/10.1016/j.mambio.2017.12.004
Marinho PH et al (2018c) Mamíferos de médio e grande porte da Caatinga do Rio Grande do Norte, Nordeste do Brasil. Mastozool Neotrop 25(2):345–362. https://doi.org/10.31687/saremMN.18.25.2.0.15
Marinho PH et al (2020) Temporal niche overlap among mesocarnivores in a Caatinga dry forest. Eur J Wildl Res 66(2):1–13. https://doi.org/10.1007/s10344-020-1371-6
Massara RL et al (2018) Effect of humans and pumas on the temporal activity of ocelots in protected areas of Atlantic Forest. Mamm Biol 92:86–93. https://doi.org/10.1016/j.mambio.2018.04.009
Melo GL et al (2017) Testing the habitat amount hypothesis for South American small mammals. Biol Cons 209:304–314. https://doi.org/10.1016/j.biocon.2017.02.031
Meredith M, Ridout M (2014) Overview of the overlap package. R Project. https://kar.kent.ac.uk/41474/1/overlap.pdf. Accessed Nov 2021
MMA. Áreas prioritárias para conservação da biodiversidade brasileira. Ministério do Meio Ambiente (2018). http://areasprioritarias.mma.gov.br/2-atualizacao-das-areas-prioritarias. Acessed 30 Mar 2021
Monteiro-Alves PS et al (2019) Occupancy, detectability and density of crab-eating fox. Can J Zool 97(10):952–959. https://doi.org/10.1139/cjz-2018-0322
Moura ACA (2007) Primate group size and abundance in the Caatinga dry forest, Northeastern Brazil. Int J Primatol 28(6):1279–1297. https://doi.org/10.1007/s10764-007-9223-8
Nagy-Reis MB, Iwakami VH, Estevo CA, Setz EZ (2019) Temporal and dietary segregation in a neotropical small-felid assemblage and its relation to prey activity. Mamm Biol 95(1):1–8. https://doi.org/10.1016/j.mambio.2018.12.005
Niedballa J et al (2016) camtrapR: an R package for efficient camera trap data management. Methods Ecol Evol 7(12):1457–1462. https://doi.org/10.1111/2041-210X.12600
Olmos F (1993) Notes on the food habits of Brazilian Caatinga carnivores. Mammalia (Paris) 57(1):126–130
Penido G et al (2017) Mesocarnivore activity patterns in the semiarid Caatinga: limited by the harsh environment or affected by interspecific interactions? J Mammal 98(6):1732–1740. https://doi.org/10.1093/jmammal/gyx119
Pires MM, Galetti M (2022) Beyond the “empty forest”: The defaunation syndromes of Neotropical forests in the Anthropocene. Glob Ecol Conserv 41:e02362. https://doi.org/10.1016/j.gecco.2022.e02362
Program Marc (2023) Available at: http://www.phidot.org/forum/index.php. Accessed Sep 2021
Projeto MapBiomas (n.d.) Coleção [5] da Série Anual de Mapas de Cobertura e Uso de Solo do Brasil. "Projeto MapBiomas - é uma iniciativa multi-institucional para gerar mapas anuais de cobertura e uso do solo a partir de processos de classificação automática aplicada a imagens de satélite. Accessed Jun 2021 via the link https://mapbiomas.org/
Putker T et al (2020) Indirect effects of habitat loss via habitat fragmentation: a cross-taxa analysis of forest-dependent species. Biol Cons 241:108368. https://doi.org/10.1016/j.biocon.2019.108368
Ribeiro EMS et al (2015) Chronic anthropogenic disturbance drives the biological impoverishment of the Brazilian Caatinga vegetation. J Appl Ecol 52(3):611–620. https://doi.org/10.1111/1365-2664.12420
Ridout MS, Linkie M (2008) Estimating overlap of daily activity patterns from camera trap data. J Agric Biol Environ Stat 14(3):322–337. https://doi.org/10.1198/jabes.2009.08038
Ritchie EG, Johnson CN (2009) Predator interactions, mesopredator release and biodiversity conservation. Ecol Lett 12(9):982–998. https://doi.org/10.1111/j.1461-0248.2009.01347.x
Rocha VJ et al (2008) Feeding habits of the crab-eating fox, Cerdocyon thous (Carnivora: Canidae), in a mosaic area with native and exotic vegetation in Southern Brazil. Rev Bras Zool 25(4):594–600. https://doi.org/10.1590/S0101-81752008000400003
Rodriguez JT, Lesmeister DB, Levi T (2021) Mesocarnivore landscape use along a gradient of urban, rural, and forest cover. PeerJ 9:1–25. https://doi.org/10.7717/peerj.11083
Rösch V et al (2015) Biodiversity conservation across taxa and landscapes requires many small as well as single large habitat fragments. Oecologia 179(1):209–222. https://doi.org/10.1007/s00442-015-3315-5
Rybicki J, Abrego N, Ovaskainen O (2020) Habitat fragmentation and species diversity in competitive communities. Ecol Lett 23(3):506–517. https://doi.org/10.1111/ele.13450
Saura S (2020) The Habitat Amount Hypothesis implies negative effects of habitat fragmentation on species richness. J Biogeogr 48(1):11–22. https://doi.org/10.1111/jbi.13958
Serieys L, Bishop JM, Rogan MS, Smith JA, Suraci JP, O'Riain MJ, Wilmers CC (2021) Exposure to anthropogenic activities and age class mediate mesocarnivore habitat selection in a human-dominated landscape. Res Square. https://doi.org/10.21203/rs.3.rs-213810/v1
Silva AC, Souza AF (2018) Aridity drives plant biogeographical sub regions in the Caatinga, the largest tropical dry forest and woodland block in South America. PLoS One 13(4):e0196130. https://doi.org/10.1371/journal.pone.0196130
Silva LT, Souza ACFF, Silva LAM (2020) Ecology, interactions and human perceptions of Cerdocyon thous in rural landscapes in the state of Pernambuco, Brazil. An Acad Bras Ciencias 92(3):1–13. https://doi.org/10.1590/0001-3765202020180890
Silva JMC, Barbosa LCF (2017) Impact of human activities on the Caating. In: Caatinga. [s.l.], vol 1. Springer, pp 359–368
Singh SP (1998) Chronic disturbance, a principal cause of environmental degradation in developing countries. Environ Conserv 25(1):1–2. https://doi.org/10.1017/S0376892998000010
Souza FH (2019) Dieta de Cerdocyon thous (Mammalia: Carnivora) e seu papel como dispersor em áreas de Caatinga de Sergipe. Dissertation, Federal University of Sergipe
Specht MJ et al (2019) Socioeconomic differences among resident, users and neighbour populations of a protected area in the Brazilian dry forest. J Environ Manage 232:607–614. https://doi.org/10.1016/j.jenvman.2018.11.101
Srbek-Araujo AC, Chiarello AG (2013) Influence of camera-trap sampling design on mammal species capture rates and community structures in southeastern Brazil. Biota Neotrop 13(2):51–62. https://doi.org/10.1590/S1676-06032013000200005
Villafañe-Trujillo ÁJ et al (2021) Activity patterns of tayra (Eira barbara) across their distribution. J Mammal 102(3):772–778. https://doi.org/10.1093/jmammal/gyaa159
Wallgren M et al (2009) Mammal community structure in relation to disturbance and resource gradients in southern Africa. Afr J Ecol 47(1):20–31. https://doi.org/10.1111/j.1365-2028.2007.00904.x
Watling JI et al (2020) Support for the habitat amount hypothesis from a global synthesis of species density studies. Ecol Lett 23(4):674–681. https://doi.org/10.1111/ele.13471
Weiler A, Núñez K, Silla F (2020) Forest matters: Use of water reservoirs by mammal communities in cattle ranch landscapes in the Paraguayan Dry Chaco. Glob Ecol Conserv 23:e01103. https://doi.org/10.1016/j.gecco.2020.e01103
Acknowledgements
Our thanks go to the Wildlife Conservation Society-Brazil for its assistance and to the Tropical Conservation Act (TFCA), which funded this project through the Brazilian Biodiversity Fund (FUNBIO) (call 04/2012). We would also like to thank Marina Antongiovanni and Daniel Bezerra for their help collecting data in the field.
Funding
Tamara Santos received support from the Coordination for the Improvement of Higher Education Personnel—Brazil (CAPES)—Funding Code 001.
Carlos Roberto Fonseca (314944/2020–6) and Eduardo M. Venticinque (308543/2021–1) received support from the National Council for Scientific and Technological Development (CNPq/Brazil).
Author information
Authors and Affiliations
Contributions
This manuscript was written by Tamara Santos, who also contributed to data extraction and statistical analysis. Eduardo M. Venticinque contributed to data extraction. Paulo H. Marinho and Carlos R. Fonseca were responsible for the conceptualization, methodology, statistical analysis, field data collection and revision of the manuscript. All the authors read and approved the final manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Santos, T., Marinho, P.H., Venticinque, E.M. et al. Spatial and temporal ecology of Cerdocyon thous: a mesopredator canid coping with habitat loss, fragmentation, and chronic anthropogenic disturbances. Landsc Ecol 39, 157 (2024). https://doi.org/10.1007/s10980-024-01913-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10980-024-01913-0