
Abstract
Context
Functional connectivity models are essential in identifying major dispersal pathways and developing effective management strategies for expanding populations of invasive alien species. However, the extrapolation of models parameterized within current invasive ranges may not be applicable even to neighbouring areas, if the models are not based on the expected responses of individuals to landscape structure.
Objectives
We have developed a high-resolution connectivity model for both terrestrial and aquatic habitats using solely potential sources. The model is used here for the invasive, principally-aquatic, African clawed frog Xenopus laevis, which is a species of global concern.
Methods
All ponds were considered as suitable habitats for the African clawed frog. Resistance costs of lotic aquatic and terrestrial landscape features were determined through a combination of remote sensing and laboratory trials. Maximum cumulative resistance values were obtained via capture-mark-recapture surveys, and validation was performed using independently collected presence data. We applied this approach to an invasive population of the American bullfrog, Lithobates catesbeianus, in France to assess its transferability to other pond-dwelling species.
Results
The model revealed areas of high and low functional connectivity. It primarily identified river networks as major dispersal pathways and pinpointed areas where local connectivity could be disrupted for management purposes.
Conclusion
Our model predicts how the dispersal of individuals connect suitable lentic habitats, through river networks and different land use types. The approach can be applied to species of conservation concern or interest in pond ecosystems and other wetlands, including aquatic insects, birds and mammals, for which distribution data are limited or challenging to collect. It serves as a valuable tool for forecasting colonization pathways in expanding populations of both native and invasive alien species and for identifying regions suitable for preventive or adaptive control measures.
Similar content being viewed by others


Introduction
The connectivity of a landscape reflects its capacity to facilitate or to impede the movement of organisms between patches of suitable habitat (Taylor et al. 1993; Baguette et al. 2013). Landscape connectivity largely contributes to the genetic diversity and extinction probability of populations, as well as the stability of metapopulations and metacommunities (Hanski and Ovaskainen 2000; Leibold et al. 2004; Büchi and Vuilleumier 2014; Thompson et al. 2017). By investigating the flow of individuals across a landscape, connectivity analyses identify the most likely pathways and identify barriers that impede exchanges between suitable habitats. Functional connectivity models typically rely on resistance costs, which quantify how challenging it is for a species to cross different land use types in relation to its movement or dispersal capabilities (Cushman et al. 2013). Such mechanistic models provide a greater level of realism than models of structural connectivity, as the latter do not consider behavioural and physiological traits and rely on relaxed assumption about movements, i.e. only considering distance between patches regardless of land use (Fischer and Lindenmayer 2007; Auffret et al. 2015).
From a conservation science perspective, connectivity models are broadly used to identify potential corridors for wildlife, locate critical connectivity disruption and assist prioritization (Vuilleumier and Prélaz-Droux 2002; Heller and Zavaleta 2009; Gilbert-norton et al. 2010; Carroll et al. 2012; Pouzols and Moilanen 2014). From an invasion science perspective, connectivity models can help to forecast the expansion of invasive populations and locate regions susceptible to invasion or where the flow of invasive individuals can be strategically disrupted for conservation purposes (Morel-Journel et al. 2016; Chaput-Bardy et al. 2017; Drake et al. 2017; Perry et al. 2017).
However, modelling connectivity in expanding populations that experience niche shifts over geographical scales or have been introduced in novel regions requires caution. Specifically, connectivity models parameterized using species occurrence or habitat/landscape data acquired from their current range can be designed to effectively minimize errors caused by spatial extrapolation when transferring models to potential new areas. This becomes particularly crucial at fine spatial scales, where the influence of climate on species distribution decreases, and the intricate details, or granularity, of landscape features and micro-habitat selection assume a more dominant role. In this regard, resistance costs such as behavioural estimates of movement across different land use types or habitats within the current range and neighbouring areas are expected to remain constant outside the current range, unless marked spatial sorting patterns are observed (Dudaniec et al. 2022).
Pond ecosystems are particularly suitable for approaches that incorporate functional connectivity (Compton et al. 2007; Clauzel et al. 2015). Ponds are relatively small and easy to locate as potential sources of aquatic individuals within the landscape. They also host specific plant and animal communities that are influenced in various ways by the presence of water. The appreciation of ponds’ contribution to biodiversity and ecosystem services is increasingly recognized, as is the acknowledgment of considering ponds as a network, rather than as isolated sites (Hill et al. 2018; Matthew et al. 2018). Furthermore, many pond-dwelling species like odonates and amphibians display periodical or erratic overland movements, while using a range of aquatic habitats across different phases of their life cycle or for various ecological functions, including our focal species, the African clawed frog Xenopus laevis and the American bullfrog Lithobates catesbeianus (Gahl et al. 2009; Raebel et al. 2010; De Villiers and Measey 2017). For these species, hydrographic networks can facilitate movements in specific directions and be used to reach neighbouring lentic water bodies. Thus, ponds, as small discrete landscape elements, offer great opportunities to model connectivity for water-related species with low detection probability or which have received limited study. This holds especially true for generalist species, i.e. when it is reasonable to assume that most ponds, if not the majority, can be utilized during movements, even if only temporarily. Due to the above-mentioned methodological challenges and conservation concern, there is a need to develop mechanistic approaches for connectivity models of pond-dwelling species that disperse on land or on air, while simultaneously using aquatic habitats to breed, forage, or seek shelter.
Herein, we developed a high-resolution connectivity model for the invasive population of the African clawed frog X. laevis in Western France. This principally aquatic amphibian species can occur in any type of freshwater habitat (Measey et al. 2012), has a generalist diet (Courant et al. 2017), and raises concern for the multiple negative impacts it causes on the native biota, globally (Measey et al. 2016). Our model uses the presence and distribution of lentic aquatic habitats (ponds and lakes) suitable for this frog species and relies on the identification of major terrestrial land use types and lotic habitat (river networks), with each of them assigned a species-specific resistance cost. These costs were obtained through laboratory trials (Vimercati et al. 2021) that focused on the different landscape features encountered by African clawed frogs during overland movement (Stevens et al. 2006; Nowakowski et al. 2015). Because our objective was to identify the main corridors within and outside the range of the invasive population, and since only a fraction of ponds in this range and its surroundings have been sampled, the model does not rely on distribution data. Instead, it relies on the assumption that lentic waterbodies (ponds) bear very low resistance costs and serve as nodes in the model that can be used at any time during the life cycle of the frog (Moreira et al. 2017). We also assume that lotic habitats are used when travelling across the landscape between ponds and have costs like any lentic waterbody. However, they do not serve as model nodes.
By not relying on distribution data, a noteworthy feature of our approach is that it might be applied to other species or cases where sampling is challenging. To assess whether our approach can be used to investigate connectivity pathways in other species and geographic areas, we have chosen to apply the same methodology to the invasive American bullfrog Lithobates catesbeianus in Southwestern France. Our choice was guided by the consideration that this species is known to cause relevant impacts on native species through predation, competition, and transmission of disease (Garner et al. 2006; Adriaens et al. 2013; Li et al. 2011) and repeated control attempts have been conducted in Southwestern France over recent decades to minimize its spread and impact (Ficetola et al. 2007a, Secondi per. obs.). For both species, we carried out a validation procedure by using presence data collected independently during visual, trapping and eDNA surveys (Vimercati et al. 2020). The aim of the validation was to determine whether areas of high connectivity identified by the model can be used to locate regions of the landscape that have been already colonized by the species.
Current biodiversity crisis is driven, among others, by increasing rate of biological invasions in freshwaters (Nunes et al. 2015), and there is a specific need to develop connectivity models for biological invaders in these habitats. While freshwater invasive species move across various landscape features and colonize ponds or other wetlands, connectivity models and the resulting maps can support conservation efforts. For instance, they can help to anticipate actions along the main expansion corridors of invasive populations or suggest how to disrupt their connectivity for management purposes (Chaput-Bardy et al. 2017). Additionally, our approach can be potentially of use for many groups such as aquatic insects, birds, and mammals, and more generally for species or populations of conservation interest in pond ecosystems and other wetlands.
Methods
Species and areas of study
Xenopus laevis is an amphibian species native to southern Africa that has been introduced into several continents (Measey et al. 2012). In Western France, a population has established likely in the early 80’s (Fouquet and Measey 2006), has expanded since then (Vimercati et al. 2020), and has led to a decrease in the abundance of native amphibians and nektonic macroinvertebrates, supposedly through competition, predation and disease transmission (Courant et al. 2018a,b). The invaded area is mostly covered by agricultural landscape with different features such as hedgerows and pastures, crops, vineyards, and woods, and is crossed by a dense hydrographic network connected to the Loire River. Pond density is high in a large part of the study area due to historical cattle breeding activities. Lithobates catesbeianus is an amphibian species that originates from eastern US. It has been introduced into at least three distinct areas in France, where it has established alien populations. The largest of these populations is located around Bordeaux, where the species has been introduced in 1968 (Berroneau et al. 2008). In this area, the land use practices resemble those used in the invasive range of X. laevis, although hedgerows are less common, and a large coniferous forest occurs in the western part. Many artificial lakes are also present, and a great proportion of them has been already colonized by the American bullfrog. The invasive range of each frog population covers approximately 4800 km2 (Secondi et al. in review). X. laevis and L. catesbeianus have been assessed as among the most invasive amphibians in the world (Measey et al. 2016; Kumschick et al. 2017), and are considered as major threats to local wetlands biodiversity. Both correlative and mechanistic niche models predicted large suitable areas for both species across most of Europe (Ficetola et al. 2007b; Johovic et al. 2020; Ginal et al. 2021).
Summary of the main steps taken to build connectivity models
Following an initial step involving the classification of the landscape into discrete features using remote sensing, satellite imagery, and landscape data, individual resistance costs were determined for each landscape feature through a combination of field and laboratory experiments. The resistance surfaces obtained have then been integrated with the distribution of ponds potentially used by the species in the program UNICOR (Landguth et al. 2012) to produce connectivity maps. A final validation step has been taken to verify whether the areas of high connectivity indicated by the model coincide with those in which the species have been historically observed. The main steps are represented in Fig. 1.

Schematic representation of the mains steps taken to compute resistant connectivity maps and validate the model using independent occurrence data. Illustration of the satellite, frog and ponds were courtesy of the Integration and Application Network, University of Maryland Center for Environmental Science (ian.umces.edu/media-library)
Construction of species-specific resistance surfaces
Selection and correction of satellite images (Fig. 1a)
We used multispectral orthorectified SPOT 6/7 satellite images that were selected considering season (mainly spring–summer, i.e. when both species disperse) and cloudiness. Eight images have been used for Western France (X. laevis) (acquisition dates 9-22nd April 2017, Appendix S3) and 12 for Southwestern France (L. catesbeianus) (acquisition dates 12 April–13 July 2015 and one image 15 March 2016, Appendix S3). Each image covers a surface of around 3600 km2 (60 × 60 km), has four spectral bands (Blue: 0.455 μm–0.525 μm; B1–Green: 0.625 μm–0.695 μm; B2–Red 0.530 μm–0.590 μm; B3-Near Infrared: 0.760 μm–0.890 μm), a spatial resolution of 6 m and a location accuracy of 10 m. SPOT 6/7 products are already corrected for radiometric and sensor distortions (Astrium 2013). Atmospheric correction was conducted on the SPOT 6/7 dataset using Fast Line-of-Sight Atmospheric Analysis for Spectral Hypercubes (FLAASH) module in ENVI (Cooley et al. 2002).
Landscape classification (Fig. 1b–d)
Image data classification was conducted with the Semi-Automatic Classification Plugin developed for QGIS (Congedo 2016). We selected the orthorectified RGB mosaic for semi-automatic classification. We created five classes, namely “water surfaces”, “built-up”, “soil”, “grass”, “forest” as surrogates of the main landscape elements that characterize Western and Southwestern France in spring, the main period of overland movement in the French population (Secondi, unpublished data). The land cover type “water surfaces” included all major rivers, streams and water bodies. The land cover type “built-up” represented all urban and peri-urban human infrastructures (buildings, farms, major roads, etc.). The land cover type ‘grass’ represented pasture, forage crops and other graminoids (Küchler and Zonneveld 1988). The land cover type ‘soil’ represented fields characterized by preparation tillage, crop residue and low or no graminoids/forbs canopy (Küchler and Zonneveld 1988). The land cover types “forest” grouped deciduous and evergreen forest, as both types impose similar resistance costs to X. laevis (Vimercati et al. 2021). Previous studies have suggested that certain landscape elements, such as grass and rivers, impair and facilitate, respectively, X. laevis dispersal in both South Africa (Vimercati et al. 2017) and Western France (Vimercati et al. 2020). Moreover, resistance costs associated with grass, forest litter, soil and asphalt are available for both X. laevis in western France (Vimercati et al. 2021) and L. catesbeianus and southern France (this paper, Appendix 3). Additional information regarding the classification of landscape into discrete categories is presented in Appendix S4.
Assignment of resistance costs (Fig. 1e-g)
For the invasive population of X. laevis in Western France, resistance costs assigned to “soil”, “grass”, “forest” and “asphalt” have been obtained through several physiological and behavioural experiments whose results have been published in Vimercati et al. (2021). These experiments estimated the degree to which land cover types influence locomotion (measured as crossing speed) in juveniles, sub-adults and adults, and dehydration and substrate choice in juveniles. Experimental results were then converted into raw resistance costs using response ratio (Xr/Xc), where Xr represents the mean response on a specific land cover type and Xc the mean response on the control type (here “asphalt”). Following Nowakowski et al. (2015), raw costs from each experiment were finally used to compute an average measure of resistance, under the assumption that each process (locomotion, dehydration, choice) had equal weight (Vimercati et al. 2021). Average resistance costs (“asphalt” = 1; “soil” = 1, “forest” = 1.5; “grass” = 2.2) were also multiplied by 5 for ease of interpretation (see Fig. 1g; Table 1). On the contrary, resistance costs for invasive L. catesbeianus in Southwestern France were not available. In this species, dispersal may be principally accomplished by juveniles that move from the natal ponds (Sepulveda and Layhee 2015, Nelson and Piovia‑Scott 2022), while adults have shown limited dispersal propensity (Figure S1, Table S1 in this paper, Descamps and Vocht 2016). Thus, we conducted a locomotion experiment on 21 juveniles of L. catesbeianus in Southern France to estimate resistance costs across the selected landscape features (“soil”, “grass”, “forest” and “asphalt”). The protocol and results of the experiment are reported in the Appendix S5, with raw resistance costs that were obtained following the same approach described for X. laevis. For both species, we attributed the highest resistance cost (999) to the “built-up” class, as the latter mimics artificial landscape features, including any building types, that cannot be crossed (Fig. 1g).
The river network and lentic water surfaces (class “water”) are expected to facilitate the dispersal of African clawed frogs and American bullfrogs, as individuals of both species can move throughout waterways and colonize ponds along river valleys (Sepulveda et al. 2015; Descamps and Vocht 2016; Measey 2016). Under the assumption that the two species exhibit behavioural patterns that fall somewhere in between those of a fish (cost for rivers and streams = 0) and a fully terrestrial frog (cost for rivers and streams = 5, like asphalt), and considering the semi-aquatic habits of X. laevis, we set as 1.5 and 2.5 the costs to cross water for X. laevis and L. catesbeianus, respectively. Such costs have been estimated by performing a sensitivity analysis of resistance costs for the class “water” for X. laevis (Fig. 1f, Appendix S6).
Calculation of maximum cumulative resistances and resistance kernels (Fig. 1c, h-i )
Resistance surfaces obtained in the previous step were used to compute resistance kernels that quantify landscape permeability by using the UNICOR package in Python (Landguth et al. 2012). The resistance kernel approach combines a kernel density estimator with a directional least-cost matrix to produce a multidirectional probability distribution representing variability in habitat quality (Compton et al. 2007). The maximum cumulative resistance cost used in UNICOR for X. laevis was 11,032/yr (i.e. 3248 m/yr), which was estimated by using data collected during a 3-year mark-recapture survey computed in 33 ponds in the invasive range of the species in Western France (Courant 2017). Since the mark recapture survey recorded 30 events of dispersal between ponds, we used the coordinates of each pair of ponds to compute 30 least-cost paths by using the resistance costs estimated through laboratory experiments and to quantify the cumulative resistance for each path. The highest cumulative resistance has been defined as the maximum cumulative resistance obtained by using the species-specific resistance costs estimated through physiological and behavioural experiments (see section below) and later used to compute resistance kernel maps (Fig. 1h). No mark-recapture data were available for L. catesbeianus but a distance of 1600 m is the maximum dispersal distance ever recorded for the species in the native range (Smith and Green 2005). Thus, the maximum cumulative resistance cost (9932/yr, i.e., 1616 m/yr) used in UNICOR for this species was estimated by choosing randomly ten pairs of 1600-m-distant ponds in Southwestern France, computing a least cost path for each pair of ponds and calculating their cumulative resistance (Fig. 1h).
We used all ponds in the study area as potential sources (nodes) to compute connectivity maps and identify the most probable dispersal corridors (Fig. 1c). Ponds were identified using GIS layers of water surfaces obtained from IGN (Institut National de l'Information géographique et forestière). We obtained a very large number of ponds (for Western France, X. laevis estimated invasive range = 4800 km2; study area = 23,000 km2, estimated number of ponds = 90,200, i.e., 4 ponds/1 km2). which made computations in UNICOR challenging and not widely applicable. In fact, computation time increases non-linearly with the number of nodes. Thus, we aggregated ponds closer than 250 m from each other and considered them as a single node using their centroids (Fig. 1c, see Appendix S1 for additional details). To evaluate the effect of this operation on the connectivity pattern, we performed the following analysis. Firstly, we selected a landscape portion (30 km × 30 km) characterized by heterogeneous patterns of ponds density, land use and waterways. Secondly, we computed resistant kernel connectivity for all ponds identified in this landscape portion for X. laevis’ range using resistance costs from lab experiments (Vimercati et al. 2020). Thirdly, we recalculated connectivity by using the centroids of neighbouring ponds instead of the ponds themselves. We found no significant difference in the resulting connectivity pattern for the chosen portion of the invaded range, (see Appendix S2). Thus, we adopted the procedure based on centroids to compute resistance kernel connectivity of X. laevis and L. catesbeianus (Fig. 1c).
To overcome prohibitive computational load without compromising accuracy of composite connectivity maps (Koen et al. 2019), resistance kernel tiles of about 1000 km2 were obtained individually, by using resistance maps (see also next paragraph) of the same size, and then overlaid in QGIS by taking the maximum value of connectivity wherever two tiles overlapped. We ensured that all resistance kernels were computed by selecting tiles that overlapped each other at least 3248 m, which was the maximum geographic distance of a potential kernel for X. laevis (see above).
Validation test of the connectivity maps (Fig. 1j)
Connectivity values of grid cells within a 250-m radius of the occurrence ponds (i.e. ponds in which the species have been observed) were summed up and divided by the total number of cells to obtain an average measure of connectivity (hereafter “average connectivity”) and then compared to grid cells located within 250-m radius of randomly selected points in the landscape. Under the assumption that high connectivity facilitates pond colonization, we predict that average connectivity associated with occurrence ponds is higher than average connectivity of random points. For X. laevis occurrences, we considered presence data collected (2012–2017) through trapping, visual and eDNA surveys (Vimercati et al. 2020) only and the same dataset augmented by historical mark recapture and visual survey since 2002 (Secondi et al. in review). For L. catesbeianus occurrences, we considered data collected (2012–2017) through trapping, visual, acoustic and eDNA surveys (Vimercati et al. 2020) only and the same dataset augmented by historical, visual and acoustic survey since 2005 (Secondi et al. in review). We used, separately, both datasets because sites from the older dataset are closer to the introduction site and had a higher probability to be colonized over time, which might blur the relationship between occurrence and predicted connectivity. To ensure that a sufficient number of occurrence ponds was included, we carried out the analysis at two spatial scales within the core area in both species, by considering occurrence ponds and random points within 15 km and 25 km from the introduction site, respectively. For each sampling period and spatial scale, we sampled a number of random points for validation that corresponded to the number of occurrence ponds. To analyse the difference in average connectivity between the two groups (occurrences—random points), we conducted a set of Wilcoxon rank sum tests and additionally calculated the bootstrapped median difference and its 95% bootstrap confidence interval (CI) by using 5000 bootstrap samples with replacement with the R package “boot” (Canty and Ripley 2021).
Results
Expected connectivity beyond the colonized ranges
We obtained a connectivity map for each invasive population by computing the resistant kernel using the estimated resistance costs. In X. laevis, the western half of the map showed a high level of connectivity (Fig. 2a), and although we chose a resistance cost for streams and river that capture the ability of the species to move through lotic habitats (cost = 1.5) but does not exclude overland dispersal (costs = 5 or higher), the hydrographic remain visible in many areas. The extension of highly connected areas to the west, resulting from the colonization of the Loire River valley, is a noteworthy aspect of X. laevis dispersion in Western France, and it has been hypothesized in a recent study (Vimercati et al. 2020). On the contrary, the eastern part of the range exhibited much lower connectivity. However, the presence of the frog in this region is confirmed, and a closer examination of this map reveals that most colonized ponds are located in areas of high connectivity, generally linked to a water course (Figs. 2a, 3, 5). Similar considerations apply to L. catesbeianus, as this species has been detected through eDNA visual and acoustic surveys in areas of high connectivity (Fig. 2b).

Resistant kernel connectivity for X. laevis (a) and L. catesbeianus (b). Colours indicate different levels of connectivity computed through UNICOR and defined using quantiles. Blue dots represent ponds where the two species were detected through visual, acoustic, visual and eDNA surveys

Details of areas characterized by differential resistance kernel connectivity for X. laevis in Western France. a Area of high connectivity already invaded by the species. b Area of low connectivity not yet invaded. c Area of low and high connectivity where the species is mostly found in narrow areas of high connectivity. Colours indicate different levels of connectivity computed through UNICOR and defined using quantiles. Blue dots represent ponds where the species were detected through visual, acoustic, visual and eDNA surveys
Test and validation of model robustness
We detected difference in connectivity values between occurrence grid cells (hosting the species) and background grid cells. In X. laevis, connectivity was significantly higher in occurrence grid cells (i.e. associated with occurrence ponds) than in background grid cells (i.e. associated with random points) at 15 km and 25 km around the introduction site (Fig. 4a,b), except for the most recent occurrence data collected within a 15-km radius (Table 2, blue dots in Fig. 4a). In L. catesbeianus, connectivity was significantly higher in occurrence grid cells than in background (random) grid cells at both spatial scales and regardless of the survey methods and periods (Table 2, Fig. 4 c,d). This result suggests that by identifying areas of high connectivity, our model can be used to pinpoint specific occurrence regions that are suitable for preventive and control measures for both species.

Boxplots showing the average connectivity generated in UNICOR within a 250-m buffer around occurrence ponds and random points at two spatial scales, i.e. within 15 km and 25 km from the introduction site, for X. laevis (a, b) and for L. catesbeianus (c, d). Ponds in which the species were detected through recent eDNA, mark-recapture, visual and acoustic surveys only, are shown in blue. Ponds in which the species were detected through eDNA, mark-recapture, acoustic surveys and historical data (before 2012) are shown in yellow. Points randomly chosen for validation are shown in grey. Asterisk indicate significant differences in connectivity values between grid cells around occurrence ponds and random points as detected by Wilcoxon rank-sum tests and bootstrapped confidence intervals (Table 2)
Predicting the expansion of newly introduced populations
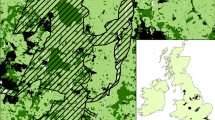
Because our approach does not require occurrence data, we have additionally used model parameters obtained from the main invasive range of X. laevis (in Western France) to compute a connectivity map for a specific site in which the species has been recently detected. This site lies within the invasive range of L. catesbeianus around the city of Bordeaux and there are questions about whether the movement patterns of the two species will coincide or each of them will use specific pathways (Fig. 5). In accordance with the resistance costs used to parameterize the model, the connectivity maps of the two species show a large coincide, which suggest that X. laevis could potentially invade an overlapping region with L. catesbeianus, using the same corridors. However, given X. laevis' greater reliance on waterways for overland dispersal, it is noteworthy that out model shows the hydrographic network playing a more substantial role in its overall connectivity pattern compared to L. catesbeianus.

a Land use in Southwestern France near Bordeaux where X. laevis has been recently detected (blue dot), connectivity resistance maps based on species-specific resistance costs for X. laevis (b) and L. catesbeianus (c) and high connectivity in both species (d). In b and c colours indicate different levels of connectivity computed through UNICOR and defined using quantiles
Discussion
Robustness and limits of the model
We developed a high-resolution connectivity model that is based on how amphibians respond to the main land features they encounter when moving across the landscape. The model considers potential movement pathways, both terrestrial and aquatic. Unlike other modelling approaches, our model does not require occurrence data and relies only on landscape features and the estimated connectivity between potential sources. This approach provides a solution to spatially extrapolate predictions beyond the species’ range. It relies, however, on the assumption that resistance cost values are similar in the colonized range, i.e., having climatically and topographically similar area. Our mechanistic approach could therefore be integrated with species distribution models that correct for biased sampling efforts (Fourcade et al. 2014) and account for niche shifts between native and invasive populations (Atwater and Barney 2021). This integration might enhance the predictive power of hybrid species distribution models by forecasting the most likely areas of expansion within broader areas of high suitability.
In support of our approach, we observed a good match between model predictions and species occurrences collected independently. However, historical data reveal the presence of the species also in regions with low connectivity values, mostly in proximity of corridors promoted by the river network (Figs. 2c, 3). Here, it is critical to emphasize that our connectivity maps do not rule out the possibility that ponds surrounded by low-connectivity landscape are colonized. Instead, the maps suggest that the colonization process will, in this case, be impeded compared to ponds situated in high-connectivity areas. We also observed a high congruence between occurrences and connectivity predictions for L. catesbeianus. More importantly, the grid cells underlying and surrounding the ponds invaded by both species exhibited significantly higher connectivity values than background grid cells. This crucial result strengthens the robustness and usefulness of our models, as it suggests that areas with high connectivity have higher chances to be colonized than those having lower connectivity.
One assumption of our modelling approach is that, excluding areas with drastically different environmental conditions, resistance costs are the same across the invasive range and in the neighbouring areas so that we can extrapolate the model beyond the colonized zone. We did not integrate other parameters, like the presence of predators or competitors, for which information is lacking. Nevertheless, both invaded areas are of relatively small size and topographically (lowlands) and climatically (oceanic climate) homogenous. This assumption might be challenged by spatial sorting, which increases movement capacity of individuals at the range periphery in expanding populations (Travis and Dytham 2002) or biases connectivity predictions in species where movement capacity is strongly affected (Phillips et al. 2006). This process has not been investigated in L. catesbeianus but has been documented in X. laevis (Courant et al. 2019), in which, however, the position of individuals in the range (core vs. periphery) had only a negligible effect on resistance costs (Vimercati et al. 2021). Thus, we opted for a unique set of resistance costs for the entire population.
Conservation implications about control strategies
Many freshwater organisms move both overland and along hydrographic networks (Bohonak and Jenkins 2003; Chaput-Bardy et al. 2017). While both movement types should be considered, it is notably difficult to estimate resistance cost for water, which opposes little resistance to amphibian movements (low friction, no dehydration). We used a procedure to balance the effect of the hydrographic network on the model output. Even so, the network appeared as an important component of the connectivity map for both species, with particular prominence in the case of or X. laevis. The predicted pattern is consistent with the species invasion history in western France. The most distant individuals from the introduction site were detected on the Thouet river valley (Eggert and Fouquet 2006) and more recently on the Loire River (Vimercati et al. 2020). The influence of rivers on colonization success may be attributed to the fact that these are slow-flowing or do not flow in summer because of dams. In addition, the valleys of these rivers host many lentic habitats like ponds and ditches, at times stretching for kilometres along the Loire River, which may act as stepping stones for the species.
The overall high connectivity level that we observe suggests that the containment of both invasive ranges within their current limits is unlikely, which supports their inclusion, at the European level, in the list of invasive alien species of union concern (Commision 2016, latest update 12th July 2022). For control purpose, centrality analyses can be used to search for hubs or network components which could be targeted in priority (Drake et al. 2017), as used for the invasive population of X. laevis (Chaput-Bardy et al. 2017). Authors found that removing the species from 5% of its colonized sites would reduce overall connectivity of the colonized area. However, this would imply to manage hundreds of sites, which might be challenging. Such a strategy seems more appropriate within a smaller area or at an earlier stage of the invasion. If disrupting connectivity across the whole range seems out of reach, it may be achieved in the eastern part of X. laevis range, where drier landscape and different rock substrates (limestone as opposed to schist) impose sparser hydrographic networks and lower pond density.
Beyond the cases investigated here, our approach can be applied to other invasive populations of X. laevis and L. catesbeianus regularly found in other continents (Ficetola et al. 2007a; Measey et al. 2012). The outputs can serve as integral components to the risk assessment process and the execution of rapid response actions, for instance to determine the maximum extent of the population or identify target areas for control or prioritization. Beyond these two invasive amphibians of major concern (Measey et al. 2016), our approach can be applied to animal groups that use ponds and hydrographic networks and are active overland dispersers, like multiple insect and mammal species. Notably, the approach is not restricted to pond-dwelling species, either as ponds may serve as step over sites to river organisms dispersing overland, like odonates (Chaput-Bardy et al. 2008). To conclude, a substantial advantage in the use of these connectivity models lies in their ability to perform spatial extrapolation for examining diverse expanding populations, such as invasive species, those reintroduced for conservation, or those migrating under climate change, assuming that resistance costs are available.
Data availability
Relevant data will be deposited in Dryad (datadryad.org) upon acceptance of the manuscript for publication.
References
Adriaens T, Devisscher S, Louette G (2013) Risk analysis report of non-native organisms in Belgium-American Bullfrog Lithobates catesbeianus (Shaw). 411641. Instituut Voor Natuur- En Bosonderzoek, pp 1–57
Astrium (2013) SPOT 6 & SPOT 7 Imagery—User guide. Si/DC/13034-v1.0
Atwater DZ, Barney JN (2021) Climatic niche shifts in 815 introduced plant species affect their predicted distributions. Glob Ecol Biogeogr 30:1671–1684
Auffret AG, Plue J, Cousins SAO (2015) The spatial and temporal components of functional connectivity in fragmented landscapes. Ambio 44:51–59
Baguette M, Blanchet S, Legrand D et al (2013) Individual dispersal, landscape connectivity and ecological networks. Biol Rev 88:310–326
Berroneau M, Detaint M, Coic C (2008) Bilan du programme de mise en place d’une stratégie d’éradication de la Grenouille taureau Lithobates catesbeianus (Shaw, 1802) en Aquitaine (2003–2007) et perspectives. Bull La Société Herpétologique Fr 127:35–45
Bohonak AJ, Jenkins DG (2003) Ecological and evolutionary significance of dispersal by freshwater invertebrates. Ecol Lett 6:783–796
Büchi L, Vuilleumier S (2014) Coexistence of specialist and generalist species is shaped by dispersal and environmental factors. Am Nat 183:612–624
Canty A, Ripley BD (2021) Boot: bootstrap R (S-Plus) functions. R package, version 1.3–28
Carroll C, Mcrae BH, Brookes A (2012) Use of linkage mapping and centrality analysis across habitat gradients to conserve connectivity of gray wolf populations in Western North America. Conserv Biol 26:78–87
Chaput-Bardy A, Lemaire C, Picard D, Secondi J (2008) In-stream and overland dispersal across a river network influences gene flow in a freshwater insect, Calopteryx splendens. Mol Ecol 17:3496–3505
Chaput-Bardy A, Alcala N, Secondi J, Vuilleumier S (2017) Network analysis for species management in rivers networks: application to the Loire River. Biol Conserv 210:26–36
Clauzel C, Bannwarth C, Foltete JC (2015) Integrating regional-scale connectivity in habitat restoration: an application for amphibian conservation in eastern France. J Nat Conserv 23:98–107
Commission E (2016) Commission implementing regulation (EU) 2016/1141 of 13 July 2016 adopting a list of invasive alien species of union concern pursuant to regulation (EU) No 1143/2014 of the European parliament and of the council. Off J Eur Union 59:4–8
Compton BW, McGarigal K, Cushman SA, Gamble LR (2007) A resistant-kernel model of connectivity for amphibians that breed in vernal pools. Conserv Biol 21:788–799
Congedo L (2016) Semi-automatic classification plugin documentation. Release 4(0.1), 29
Cooley T, Anderson G, Felde G, et al. (2002) FLAASH, a MODTRAN4-based atmospheric correction algorithm, its application and validation. IEEE Int Geosci Remote Sens Symp 1414–1418
Courant J (2017) Invasive biology of Xenopus laevis in Europe: ecological effects and physiological adaptations. MNHN, Paris
Courant J, Vogt S, Marques R et al (2017) Are invasive populations characterized by a broader diet than native populations? PeerJ 5:e3250
Courant J, Secondi J, Vollette J, Herrel A, Thirion JM (2018) Assessing the impacts of the invasive frog, Xenopus laevis, on amphibians in western France. Amphibia-Reptilia 39(2):219–227
Courant J, Vollette E, Secondi J, Herrel A (2018) Changes in the aquatic macroinvertebrate communities throughout the expanding range of an invasive anuran. Food Webs 17:e00098
Courant J, Secondi J, Guillemet L et al (2019) Rapid changes in dispersal on a small spatial scale at the range edge of an expanding population. Evol Ecol 33:599–612
Cushman SA, Mcrae B, Adriaensen F et al (2013) Biological corridors and connectivity. Key Top Conserv Biol 2:384–404
De Villiers FA, Measey J (2017) Overland movement in African clawed frogs ( Xenopus laevis ): empirical dispersal data from within their native range. PeerJ 5:e4039
Descamps S, De Vocht A (2016) Movements and habitat use of the invasive species Lithobates catesbeianus in the valley of the Grote Nete (Belgium ). Belgian J Zool 146:90–100
Drake JC, Griffis-Kyle KL, McIntyre NE (2017) Graph theory as an invasive species management tool: case study in the Sonoran Desert. Landsc Ecol 32:1739–1752
Eggert C, Fouquet A (2006) A preliminary biotelemetric study of a feral invasive Xenopus laevis population in France. Alytes 26:144–149
Ficetola GF, Coïc C, Detaint M et al (2007a) Pattern of distribution of the American bullfrog Rana catesbeiana in Europe. Biol Invasions 9:767–772
Ficetola GF, Thuiller W, Miaud C (2007b) Prediction and validation of the potential global distribution of a problematic alien invasive species: The American bullfrog. Divers Distrib 13:476–485
Fischer J, Lindenmayer DB (2007) Landscape modification and habitat fragmentation: a synthesis. Glob Ecol Biogeogr 16:265–280
Fouquet A, Measey GJ (2006) Plotting the course of an African clawed frog invasion in Western France. Anim Biol 56:95–102
Fourcade Y, Engler JO, Rödder D, Secondi J (2014) Mapping species distributions with MAXENT using a geographically biased sample of presence data: a performance assessment of methods for correcting sampling bias. PLoS ONE 9:1–13
Gahl MK, Calhoun AJK, Graves R et al (2009) Facultative use of seasonal pools by American bullfrogs (Rana catesbeiana). Wetlands 29:697–703
Garner TWJ, Perkins MW, Govindarajulu P, Seglie D, Walker S, Cunningham AA, Fisher MC (2006) The emerging amphibian pathogen Batrachochytrium dendrobatidis globally infects introduced populations of the North American bullfrog, Rana Catesbeiana. Biol Lett 2(3):455–459
Gilbert-norton L, Wilson R, Stevens JR, Beard KH (2010) A meta-analytic review of corridor effectiveness. Conserv Biol 24:660–668
Ginal P, Mokhatla M, Kruger N et al (2021) Ecophysiological models for global invaders: Is Europe a big playground for the African clawed frog? J Exp Zool Part A Ecol Integr Physiol 335:158–172
Hanski I, Ovaskainen O (2000) The metapopulation capacity of a fragmented landscape. Nature 404:755–758
Heller NE, Zavaleta ES (2009) Biodiversity management in the face of climate change: a review of 22 years of recommendations. Biol Conserv 142:14–32
Hill MJ, Hassall C, Oertli B et al (2018) New policy directions for global pond conservation. Conserv Lett 11:e12447
Johovic I, Gama M, Banha F et al (2020) A potential threat to amphibians in the European Natura 2000 network: forecasting the distribution of the American bullfrog Lithobates catesbeianus. Biol Conserv 245:108551
Koen EL, Ellington EH, Bowman J (2019) (2019). Mapping landscape connectivity for large spatial extents. Landsc Ecol 34:2421–2433
Küchler AW, Zonneveld IS (eds) (1988) Vegetation mapping. Springer, Heidelberg
Kumschick S, Measey GJ, Vimercati G et al (2017) How repeatable is the environmental impact classification of alien taxa (EICAT)? Comparing independent global impact assessments of amphibians. Ecol Evol 7:2661–2670
Landguth EL, Hand BK, Glassy J et al (2012) UNICOR: a species connectivity and corridor network simulator. Ecography (Cop) 35:9–14
Leibold MA, Holyoak M, Mouquet N et al (2004) The metacommunity concept: a framework for multi-scale community ecology. Ecol Lett 7:601–613
Li Y, Ke Z, Wang Y, Blackburn TM (2011) Frog community responses to recent American 405 bullfrog invasions. Curr Zool 57(83–92):406
Measey J (2016) Overland movement in African clawed frogs (Xenopus laevis). PeerJ 4:e2474
Measey GJ, Rödder D, Green SL et al (2012) Ongoing invasions of the African clawed frog, Xenopus laevis: a global review. Biol Invasions 14:2255–2270
Measey GJ, Vimercati G, de Villiers FA et al (2016) A global assessment of alien amphibian impacts in a formal framework. Divers Distrib 9:970–981
Moreira FD, Marques R, Sousa M, Rebelo R (2017) Breeding in both lotic and lentic habitats explains the invasive potential of the African clawed frog (Xenopus laevis) in Portugal. Aquat Invasions 12:565–574
Morel-Journel T, Piponiot C, Vercken E, Mailleret L (2016) Evidence for an optimal level of connectivity for establishment and colonization. Biol Lett 12:20160704
Nelson N, Piovia-Scott J (2022) Using environmental niche models to elucidate drivers of the American bullfrog invasion in California. Biol Invasions 24(6):1767–1783
Nowakowski AJ, Veiman-Echeverria M, Kurz DJ, Donnelly MA (2015) Evaluating connectivity for tropical amphibians using empirically derived resistance surfaces. Ecol Appl 25:928–942
Nunes AL, Tricarico E, Panov VE et al (2015) Pathways and gateways of freshwater invasions in Europe. Aquat Invasions 10:359–370
Perry GLW, Moloney KA, Etherington TR (2017) Using network connectivity to prioritise sites for the control of invasive species. J Appl Ecol 54:1238–1250
Phillips BL, Brown GP, Webb JK, Shine R (2006) Invasion and the evolution of speed in toads. Nature 439:803
Pouzols FM, Moilanen A (2014) A method for building corridors in spatial conservation prioritization. Landsc Ecol 29:789–801
Raebel EM, Merckx T, Riordan P et al (2010) The dragonfly delusion: why it is essential to sample exuviae to avoid biased surveys. J Insect Conserv 14:523–533
Sepulveda AJ, Layhee M (2015) Description of fall and winter movements of the introduced American Bullfrog (Lithobates catesbeianus) in a Montana, USA, pond. Herpetol Conserv Biol 10(3):978–984
Sepulveda AJ, Layhee M, Stagliano D et al (2015) Invasion of American bullfrogs along the Yellowstone River. Aquat Invasions 10:69–77
Smith MA, Green DM (2005) Dispersal and the metapopulation in amphibian and paradigm ecology are all amphibian conservation: populations metapopulations? Ecography (Cop) 28:110–128
Stevens VM, Leboulengé É, Wesselingh RA, Baguette M (2006) Quantifying functional connectivity: experimental assessment of boundary permeability for the natterjack toad (Bufo calamita). Oecologia 150:161–171
Taylor PD, Fahrig L, Henein K, Merriam G (1993) Connectivity is a vital element of landscape structure. Oikos 68:571–573
Thompson PL, Rayfield B, Gonzalez A (2017) Loss of habitat and connectivity erodes species diversity, ecosystem functioning, and stability in metacommunity networks. Ecography (Cop) 40:98–108
Travis JMJ, Dytham C (2002) Dispersal evolution during invasions. Evol Ecol Res 4:1119–1129
Vimercati G, Davies SJ, Hui C, Measey J (2017) Does restricted access limit management of invasive urban frogs? Biol Invasions 19:3659–3674
Vimercati G, Dejean T, Labadesse M, Secondi J (2020) Assessing the effect of landscape features on pond colonisation by an elusive amphibian invader using environmental DNA. Freshw Biol 65:502–513
Vimercati G, Kruger N, Secondi J (2021) Land cover, individual’s age and spatial sorting shape landscape resistance in the invasive frog Xenopus laevis. J Anim Ecol 90:1170–1190
Vuilleumier S, Prélaz-Droux R (2002) Map of ecological networks for landscape planning. Landsc Urban Plan 58:157–170
Acknowledgements
We are thankful to Aurélie Davranche for her advice on GIS methods early in the project and Julian Courant for sharing results of mark-recapture surveys of invasive African clawed frogs in Western France. We extend our gratitude to the two anonymous reviewers for their valuable feedback, which greatly enhanced the quality of this manuscript. This study was funded by European Commission LIFE program, Grant/Award Number: LIF15 NAT/FR/000864; Ministère de la transition écologique et solidaire; Région Nouvelle Aquitaine; Région Centre Val de Loire; Agence de l'eau Adour-Garonne; Beauval Nature. G.V. would like to acknowledge funding by the Belmont Forum – BiodivERsA International joint call project InvasiBES from the Swiss National Science Foundation (NSF Grants No. 31BD30_184114 and 31003A_179491).
Funding
Funding was provided by European commission Life program (LIF15 NAT/FR/000864, LIF15 NAT/FR/000864, LIF15 NAT/FR/000864), Ministère de la transition écologique et solidaire, Région Nouvelle Aquitaine, Région Centre Val de Loire, Agence de l’eau Adour-Garonne,Beauval Nature.
Author information
Authors and Affiliations
Contributions
All authors contributed to the design of the study. GV carried out the modelling and the analyses and wrote the draft. JS conceived the idea and wrote the draft. MB conducted the telemetry study on bullfrogs. DR, SV contributed to the critical revision of the draft.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Vimercati, G., Rödder, D., Vuilleumier, S. et al. Large-landscape connectivity models for pond-dwelling species: methods and application to two invasive amphibians of global concern. Landsc Ecol 39, 76 (2024). https://doi.org/10.1007/s10980-024-01858-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10980-024-01858-4