
Abstract
We have applied the empirical Green’s function (EGF) method to 53 pairs of earthquakes, with magnitudes ranging from M = 0.4 to M = 3.4, induced by gas production from the Groningen field in the Netherlands. For a subset of the events processed, we find that the relative source time functions obtained by the EGF deconvolution show clear indications of a horizontal component of rupture propagation. The earthquake monitoring network used has dense azimuthal coverage for nearly all events such that wavelet duration times can be picked as a function of source-station azimuth and inverted using the usual Doppler broadening model to estimate rupture propagation strike, distance, and velocity. Average slip velocities have also been estimated and found to be in agreement with typical published values. We have used synthetic data, from both a simple convolutional model of the seismogram and more sophisticated finite difference rupture simulations, to validate our data processing workflow and develop kinematic models which can explain the observed characteristics of the field data. Using a measure based on the L1-norm to discriminate results of differing quality, we find that the highest quality results show very good alignment of the rupture propagation with directions of the detailed fault map, obtained from the full-field 3D seismic data. The dip direction rupture extents were estimated from the horizontal rupture propagation distances and catalogue magnitudes showing that, for all but the largest magnitude event (the M = 3.4 event of 8th January 2018), the dip-direction extent is sufficiently small to be contained wholly within the reservoir.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Gas production from the Groningen gas field (Fig. 1) started in 1963. It is the largest natural gas field in Europe with initial reserves estimated at 2900 billion cubic meters (bcm). The reservoir is a high quality, heavily faulted sandstone, some 200- to 300-m thick over most of the field. Annual production volumes were determined by demand between 1995 and 2014; since then production has been repeatedly cut in response to concerns about induced seismicity. Triggered tectonic events are considered to be very unlikely in the North of the Netherlands and it is now accepted that seismicity in the region is induced by gas production, from Groningen and other fields. The first production-related earthquake detected over the Groningen field occurred in 1991. Bourne and Oates (2017) reported that the number of earthquakes per unit gas production increases with cumulative gas production; Bourne et al. (2018) have shown the level of induced seismic activity increasing exponentially with the induced stress. The largest induced earthquake in the Groningen catalogue was of ML 3.6 and occurred in August, 2012, near the village of Huizinge, in the central part of the field. This event was felt widely, leading to many claims for minor building damage, and has triggered much public debate.

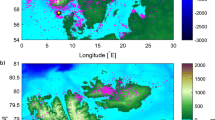
Location map with earthquake epicentres (all events with ML ≥ 1.5 between 1995 and 2017) shown as red circles (local magnitudes in legend), the Groningen field outline, mapped geological faults, seismometer stations (blue triangles), and building locations (grey dots). Coordinates are in thousands of metres in the Dutch RD system. Originally published in van Elk et al. (2019)
Following the emergence of induced seismicity, a network of near-surface stations was deployed over the NE Netherlands by the Royal Netherlands Meteorological Institute (KNMI). This sparse network comprised only six stations over or near the Groningen field. Each of the near-surface stations comprised three-component geophones at four depth levels in boreholes of up 300 m deep. This network’s magnitude of completeness is taken to be ML 1.5 (Dost et al. 2017). Surface accelerographs were also deployed. As part of the response to the 2012 Huizinge event, the earthquake monitoring network was densified to lower the magnitude of completeness and improve the precision of event locations (Dost et al. 2017). Starting in 2014, some 70 stations, with sensors placed every 50 m along 200 m deep boreholes, were added. The expanded network has a magnitude of completeness of about ML 0.5, and epicentral location uncertainties are about 100–300 m. Except for some low-magnitude events, most hypocentres have been located within the Rotliegend sandstone reservoir (Spetzler and Dost 2017). To complement the KNMI network, geophones were deployed over the reservoir interval in two deep monitoring wells in the region of highest seismic activity. This has enabled detection of micro-earthquakes, with magnitudes below the detection threshold at surface. KNMI processes the data from the near-surface network, making openly available catalogues of event times, epicentres, depths, and magnitudes. Processing using full waveform inversion methods to obtain locations and moment tensors has been carried out by Willacy et al. (2020), Kühn et al. (2020), and Dost et al. (2020). Further details of the Groningen field and its induced seismicity are given by De Jager and Visser (2017) and Dost et al. (2017).
The Groningen earthquake catalogue generated by KNMI contains some 1400 located events up to the end of 2020. Event hypocenters are assumed to be located in the gas reservoir and assigned a nominal depth of 3 km below surface unless the data provides sufficient constraint for the depth to be generated by the location inversion. The densification of the network, the deployment of deep downhole geophones, and the use of full waveform inversion methods, as described above, have confirmed the assumption that events initiate in the gas reservoir (Daniel et al. 2016). The subsurface velocity profile (Willacy et al. 2019) shows the Rotliegend sandstone reservoir overlain by a thick package of Zechstein evaporites and with high-velocity carboniferous rocks below. As such, the reservoir interval which hosts the induced earthquakes acts as a wave guide, resulting in sub-horizontal ray paths (Kraaijpoel and Dost 2013; Jagt et al. 2017) and complex patterns of arrivals due to multiple reflections and mode conversions (Willacy et al. 2019).
The work of Willacy et al. (2020) established a clear connection between the mapped faults and event locations and focal mechanisms, thereby building confidence in the statistical geomechanical models used to forecast future activity and assess hazard and risk (van Elk et al. 2019). The motivation for the present work was to add information on rupture propagation to this body of knowledge to further our geomechanical understanding.
We have applied the empirical Green’s function (EGF) method to strongly correlated pairs of the earthquakes, with the aim of detecting finite size rupture propagation effects in this population of small magnitude events. EGF analysis is conventionally applied to earthquake pairs with a magnitude difference of at least 1. We show here how the EGF deconvolution process can generate useful rupture propagation information for pairs of events with comparable magnitudes. The rupture directivity analysis method originally developed by Savage (1965) has been applied to the relative source time functions (RSTFs) resulting from EGF processing (see for example Folesky et al. 2016) to obtain estimates of horizontal rupture direction and length for comparison with mapped reservoir-level faulting.
Wang et al. (2014) have analysed the azimuthal variations of the durations of RSTFs for a rich set of composite events on part of the San Andreas Fault system and inverted their results for the separation and centroid time delay of the composites’ sub-events. Park and Ishii (2015) present a model which can accommodate more complex patterns of duration variation from non-unilateral rupture propagation which also takes into account the dip component of the propagation vector. Yoshido et al. (2019) applied the EGF method and subsequent directivity analysis to a swarm of earthquakes following the 2011 Tohoku-Oki earthquake and compared the rupture propagation directions obtained with mapped trajectories showing the migration of hypocentres along fault structures. Ameri et al. (2020) have applied the directivity analysis to a subset of Groningen earthquake seismogram data without EGF processing. The subset of events selected for directivity analysis by Ameri et al. (2020) has only limited overlap with the set of events analysed here. As such, their results and, in particular, their comparison of rupture directions with the mapped faults complement the results presented here.
2 Theoretical background
The review article by Hutchings and Viegas (2012) gives an overview of the development and applications of the empirical Green’s function method. Here we give a concise account of the EGF method in the form in which we have applied it to the Groningen data.
The empirical Green’s function method utilises spatially approximately collocated pairs of events of significantly different sizes to remove by deconvolution the effects of propagation through the subsurface (Li et al. 1995a). The aim is to give a cleaner representation of the source time function which is then suitable for further quantitative analysis. Consider two collocated events, a larger event, \({U}_{l}\), and a smaller event, \({U}_{g}\), which will be taken as the empirical Green’s function. Moreover, the focal mechanism is taken to be the same for both events. We use here a simple convolutional model which expresses the seismogram as the convolution of a wavelet and a series of pulses corresponding to the discrete arrivals recorded. \(S\left(t\right)\) is the source time function, \(P\left(t\right)\) represents the subsurface propagation effects, and \(R\left(t\right)\) and \(I(t)\) represent, respectively, the effects of the recording system and the instrument response. The velocity seismograms for the two events, recorded by the same seismometer, are expressed as follows (for idealised noise-free data):
Here the source time functions are scaled by the radiation patterns in spherical coordinates and the scalar moments, \({F}_{l}(r,\theta ,\phi )\) and \({F}_{g}(r,\theta ,\phi )\), and \({M}_{l}\) and \({M}_{g}\), respectively. The propagation term, \(P\left(t\right)\), is a filter representing spreading, absorption, and scattering processes. Here, it is sufficient to recognise that the terms which have not been fully specified are nevertheless assumed to be the same for the pair of collocated events. Deconvolving \({U}_{l}\left(t\right)\) with \({U}_{g}\left(t\right)\) causes the common contributions to cancel leaving the relative source time function, \({S}_{r}\left(t\right)\):
Moreover, if the source time function of the smaller event is small enough that it can be regarded as an impulsive point source, \({S}_{g}\left(t\right)\approx \delta (t)\), then the relative source time function is an approximation of the larger event’s source time function, scaled by the ratio of the moments, \({S}_{r}\left(t\right)\approx {({M}_{l}/M}_{g}){S}_{l}\left(t\right)\).
The deconvolution is usually implemented as a spectral division. The algorithm used here multiplies the larger (parent) event’s spectrum, \({\widetilde{U}}_{l}(\omega )\), by the deconvolution function, \(D(\omega )\), derived from the spectrum of the smaller (child) event, \({\widetilde{U}}_{g}(\omega )\) as follows:
Here, N is an additive noise term used to stabilise the deconvolution outside of the signal band of the recorded seismogram (Berkhout 1977). Phase deconvolution is the corresponding subtraction of the phase spectra. The output from the amplitude deconvolution is
and this only reduces to the exact EGF relative source time function in the limit of zero additive noise,
In practice, this additive noise term is needed to stabilise the deconvolution results (see for example Folesky et al. 2016): it is important therefore to understand its impact on the output of the EGF process. The effect of the added noise is to attenuate the RSTF at high and low frequencies, at and beyond the edges of the signal band, whereas the effect in the time domain is to smooth the RSTF. The limit of \(N\gg 1\) will also turn out to be important—in this case the spectral division of Eq. (5) reduces to the scaled product of the spectra of the two events which, in the time domain, corresponds to the scaled convolution of the seismograms or, equivalently, the cross-correlation after time reversal of one of the seismograms.
3 Description of the dataset analysed
The event data processed has been acquired over the Groningen gas field in The Netherlands (De Jager and Visser 2017). These earthquakes, in the magnitude range from M = 0.4 to M = 3.4, have been induced by gas production from the field. The seismograms were recorded using the KNMI network and the data downloaded from the publicly accessible KNMI data portal at http://rdsa.knmi.nl/dataportal (Dost et al. 2017). This network, as shown in Fig. 1, comprises some 70 stations to give a spatially dense coverage of the gas field with a generally very good azimuthal coverage for the majority of events. Each of these stations comprises an approximately 200-m-deep borehole with 4.5Hz 3C geophone units grouted in place at 200 m, 150 m, 100 m, and 50 m below the surface with, in addition, an accelerometer unit and multichannel data recorder and transmission system at surface. The data was acquired at 200sps, giving a Nyquist frequency of 100 Hz: for 200sps, the recorder has a flat frequency response from DC to 80 Hz. Between 80 and 100 Hz the signal is strongly attenuated by the recorder’s anti-alias filter which gives more than 140 dB of attenuation at the output Nyquist frequency. The spectrum beyond 80 Hz is dominated by instrument noise (Spica et al. 2018). As processed here, the data had not been instrument corrected. Data from the two deep downhole monitoring wells (Daniel et al. 2016) was not used in this study.
As described by Van Dedem et al. (2018), seismograms were cross-correlated for all event pairs, using a procedure similar to that due to Arrowsmith and Eisner (2006). The maximum amplitude of the stack over all stations of the normalised cross-correlation traces was used as a discriminant to identify the event pairs with high waveform similarity for EGF processing. Examples are shown in Fig. 2 and Van Dedem et al. (2018). It should be emphasised that here we have identified event pairs or clusters on the basis of cross-correlation alone, whereas it is more common to also require small location separation and significant or large magnitude differences. We argue below that not having vanishingly small separations and large magnitude differences is not in itself a barrier to obtaining useful results from the deconvolution process. Jagt et al. (2017) describe cluster analysis of Groningen events using data from the same KNMI database over the period January, 2010–January, 2016, for the purpose of relative location refinement.


Panels showing example seismogram pairs from the event pairs shown in Figs. 6(a), 7(a), 8(a), 9(a) and 10(a). The traces are from the east orientation horizontal component of the 3C geophone unit at depth 150 m: the stations with the shortest epicentral distances have been selected. The direct compressional and shear arrivals can be easily identified along with a shear interbed multiple. Trace identifiers give event ID (SHT) and receiver station number (RECST). A long gate automatic gain control (AGC) has been applied to bring individual seismogram amplitudes to a common level for visual comparison. The final panel is a zoom of part of the first panel (event pair 18024/18039) to illustrate the waveform similarity in more detail. Event separations for the event pairs shown are, respectively, 158 m (18024/18039), 71 m (18019/18039), 71 m (16117/16089), 122 m (17124/18002), and 293 m (17064/17052), as in Tables 2 and 3
4 Simple kinematic models of extended rupture
The objective of the EGF processing applied was to detect signs of finite rupturing as distinct from the effective point source approximation often assumed for low-magnitude events. As explained above, the Groningen earthquake hypocentres are located within the Rotliegend sandstone reservoir which acts as a waveguide due to the high velocity layers directly above and below. Except for the shortest epicentral distances, the horizontal components of the source-receiver ray paths are assumed to be accounted for by propagation through the reservoir. Ray tracing (Kraaijpoel and Dost 2013; Jagt et al. 2017) and finite difference wave propagation simulations (Willacy et al. 2019) indicate that we should not expect to be able to access a significant range of take-off dip angles. We therefore assume that only the horizontal component of rupture propagation will be detectable using the EGF method. This contrasts with the work of Park and Ishii (2015) in which the dip of the take-off vector is also addressed by the inversion scheme.
To understand our results we have built simple kinematic source models which represent the larger event as a composite of multiple slip patches (such an approach is discussed by Hutchings and Viegas 2012). The motivation was to develop a conceptual framework for interpreting the field data, provide expressions for the RSTF duration as a function of station azimuth, and enable us to generate synthetic seismograms on which to validate the data processing.
Mechanisms seen in the Groningen field are mainly normal faulting on high-angle faults (Willacy et al. 2018; Dost et al. 2020), so we consider models of mode III failure, that is rupture for which the direction of slip is perpendicular to the direction of rupture propagation (Udías et al. 2014), to model the along-strike rupture propagation. Referring to Fig. 3(a), we consider an event dominated by a starting phase and a stopping phase located at the two ends of the horizontal projection of the fault trace of length, \(L\), and separated in time by \(L/\zeta\), where \(\zeta\) is the rupture propagation velocity. \({Rs}_{i}\) and \({Re}_{i}\) are the epicentral distances between the source and the \({i}^{{\text{th}}}\) receiver station at (respectively) the start and end of the rupture process; \({\phi }_{i}\) is the azimuthal angle of the \({i}^{{\text{th}}}\) station relative to the starting phase location measured in the clockwise direction from the fault strike direction; \(c\) is the seismic velocity (P or S as required) in a homogeneous subsurface. Without loss of generality, we develop the theory in a coordinate system aligned with the fault strike direction, \(\Phi\). The cosine rule gives the epicentral distance for the stopping phase in terms of that of the starting phase, the fault trace length, and azimuthal angle, \({\phi }_{i}\):

The geometries considered for unilateral (a) and bilateral (b) rupture propagation. These diagrams show the definitions of angles and distances in the horizontal plane from a rupture to an individual seismometer station. \({Rs}_{i}\), \({Re}_{i}\) and \({Re^{\prime}}_{i}\) are epicentral distances to, respectively, the start and end points of the ruptures; \({Rg}_{i}\) is the epicentral distance to the child event; \(L\) and \(L^{\prime}\) are rupture propagation distances; \(\Delta\) is the offset of the smaller child event from the larger parent event; \({\phi }_{i}\) is the station azimuth; \(\Psi\) is the azimuth of the offset vector of the child event relative to the strike direction of the larger event. For the case of bilateral rupture propagation (b) the child event’s source-receiver distance, azimuth, and offset relative to the hypocentre (i.e. initiation point) of the parent event are not shown on the diagram for reasons of simplicity but are defined as for the unilateral case (a)
If the rupture propagation distance is small compared with the source-station offset (\({Rs}_{i}\gg L\)), as will be the case for the geometries we consider here, then dropping higher order terms in \(L/{Rs}_{i}\) gives
In the Appendix it is shown that the angle-dependent duration of the RSTF in the case of unilateral rupture propagation is
To accommodate realistic band-limited pulses and duration measured between zero crossings, the width, \({w}_{t}\), of the individual pulses has been added. This is essentially the expression given by Savage (1965). It can be seen as an example of angle-dependent Doppler broadening.
For the case in which a pair of parallel ruptures, both comprising multiple slip patches, is processed with the EGF deconvolution workflow with the application of high additive noise, the duration expression is of the same form but with the rupture propagation distance replaced by the sum of the rupture propagation distances of the two events (as shown in the Appendix). This implies that the usual assumption for EGF processing, that the smaller event be considered to be a single pulse, is not strictly necessary for this application if a generalisation of the EGF deconvolution operator is admitted. Stabilisation of the deconvolution process is required to avoid inflating noise outside the signal band and this leads naturally to a deconvolution operator which combines the pure EGF spectral division with the convolution of parent and child seismograms. In the low N limit, the spectral division removes the effects of common operators (propagation, instrument response, band pass filters, etc.) leading to optimal recovery of duration model parameters for the parent when the child is a much smaller rupture. In the high N limit the seismogram convolution extracts an approximate RSTF from which useful estimates of the duration model parameters for ruptures of comparable size can still be made. An intermediate value of additive noise combines the effects of low and high N with limited impact on the measured duration. The usual restriction to event pairs with a magnitude difference of at least 1.0 (Hutchings and Viegas 2012) would rule out most of the event pairs identified by the cross-correlation criterion in the Groningen catalogue. We argue (see Appendix) that by adjusting the stabilising noise in the deconvolution operator useful results can also be obtained by applying the EGF deconvolution workflow to event pairs with similar magnitudes.
In the following sections we will show for some representative event pair examples how a compelling qualitative visual fit of the convolutional model data to the field data can be obtained using the rupture propagation parameter values obtained by processing the real data. It will be demonstrated to what extent the simple synthetics, when processed using the same workflow as used for the field data, return the input parameters. This we feel is an important validation of the processing scheme.
More sophisticated kinematic rupture models have been built using a finite difference code which models both the propagation of the rupture itself and the propagation of seismic waves away from the evolving rupture. The rupture is modelled as a composite failure, comprising a number of separate slip patches with additional stochastic heterogeneity distributed over a fault plane embedded in a 3D subsurface model such that components of rupture propagation in both the dip and strike directions can be modelled. Propagation of the rupture across the fault plane is governed by causal rules which determine the triggering of a slip patch by its neighbours. As a full waveform model this approach generates seismograms which better represent real seismogram data while still being based on a simple kinematic description of the rupture process. Details of the finite difference kinematic rupture simulation approach are given in Zurek et al. (2017), Zurek and deMartin (2019), and Edwards et al. (2019). See also Graves and Pitarka (2016). Examples from this modelling approach are shown below.
5 Data processing workflow
Our data analysis workflow is similar to that described by Tomic et al. (2009). The main steps in the EGF processing sequence applied are summarised in Fig. 4; certain aspects are described in more detail here.

Summary of data processing steps in the empirical Green’s function workflow applied
Seismic data processing made use of established proprietary software (Willacy et al. 2020). As explained above, the deconvolution is implemented as a spectral division with additive noise to stabilise the process. Figure 5 illustrates the effect of varying the additive noise level on the time domain seismograms for event pair 18024/18039. The plots show the RSTFs obtained using a range of noise values between N = 1 and N = 0.0001 in the spectral division. Notice how the higher levels of additive noise smooth the traces. Although this stabilises the picking process, mis-picks still occur as shown in this example and have been manually excluded from the parameter inversion process described below. Note also how the lower N values better suppress amplitudes before and after the picked start and end times of the RSTF.

EGF output for event pair 18024/18039 using a range of deconvolution noise values N = 0.0001 (top left), 0.001 (top right), 0.01 (centre left), 0.1 (centre right), and 1.0 (bottom row, with and without time picks). The traces have been duplicated and displayed on the interval \([- \pi ,3\pi ]\) to ensure that periodic effects are not obscured. Here and in subsequent plots, each trace gives the RSTF for a single station (stacked over the four depth levels and three components); the background colours indicate trace amplitudes (interpolated between traces) using a standard red-blue colour scale for negative and positive values; the red and green curves are the picked zero crossings from which the RSTF duration is determined; the trace identifiers give the azimuths \({\phi }_{i}\) of the stations in ° clockwise from N
After the deconvolution step, a long gate automatic gain control (AGC) is applied to the RSTF seismogram data. This leaves the zero crossings, and hence the measured duration, unchanged but dramatically enhances the trace-to-trace consistency of the azimuth panels, helping visual interpretation.
We obtain the best results by summing the RSTFs for all four geophone levels (200 m, 150 m, 100 m, and 50 m) and components (X, Y, Z) of a station. Since the spectral division removes all effects common to both seismograms, including path and coupling effects, the RSTF should be approximately the same for all depth levels and components of the same station justifying stacking to suppress noise (also see Appendix).
The RSTF traces are duplicated by copying to azimuth values which are greater by \(2\pi\) and then displayed on the interval \([- \pi ,3\pi ]\). This is purely for display purposes and ensures that periodic effects which may occur close to the ends of the original azimuth range are not obscured.
RSTF durations are obtained as the time delays between picked zero crossings of the RSTF as shown. Obvious mis-picks were removed by hand excluding them from the inversion process. The azimuthal dependency of the duration is fit using the Doppler broadening expression as derived above. Excel’s Solver was used to minimise the sum of the absolute values of the residuals between the modelled and observed durations. This gives values for the parameters \(L\), \(\zeta\) and the fault strike, \(\Phi\); the pulse width, \({w}_{t}\), needs to be estimated separately.
To generate the synthetic seismograms used, arrivals from an assumed source location at the actual station locations were generated with travel times derived for a constant velocity subsurface, as shown in the Appendix. The synthetic seismograms were then band pass filtered to match the frequency content of the field data and white noise was added to represent the seismograms’ post-AD converter noise floor (see Havskov and Alguacil 2004; Spica et al. 2018).
6 Description of results
A total of 53 event pairs with high cross-correlation values have been processed using the workflow described above. RSTFs for some representative example event pairs are shown in Figs. 6(a), 7(a), 8(a), 9(a) and 10(a). The results presented here are for traces windowed on the S arrivals. In all cases, the Doppler broadening expression for the unilateral propagation model was fitted to the arrival picks of the RSTFs generated (Figs. 6(b), 7(b), 8(b), 9(b) and 10(b)). The Generalized Reduced Gradient Nonlinear solver functionality in Excel was used to minimise the L1 sum of the residuals by varying the three parameters \(\left\{{A}_{1},{A}_{2},\Phi \right\}\) describing the azimuthal dependence of the wavelet duration:
where \({{A}_{1}=L/\zeta +w}_{t}\), \({A}_{2}=L/c\), and \(\Phi\) is the fault strike.


a EGF trace output for event pair 18024/18039 with horizontal source-station offsets restricted to 20 km (top) and the accompanying convolutional model synthetic data processed with N = 1 (middle) and N = 0.0001 (bottom). The traces have been duplicated and displayed on the interval \([- \pi ,3\pi ]\) to ensure that periodic effects are not obscured. b Picked duration between the zero crossings of the RSTF traces (top) for event pair 18024/18039 (blue data points) with Doppler model fit (orange curve) and the accompanying convolutional model data for, respectively, N = 1 and N = 0.0001 (middle and bottom). See results summarised in Tables 2 and 3. Results are shown on the interval \([- \pi ,3\pi ]\) as for the seismogram displays

a EGF trace output for event pair 18019/18039. Compare with the output for event pair 18024/18039 in Fig. 6(a). The traces have been duplicated and displayed on the interval \([- \pi ,3\pi ]\) to ensure that periodic effects are not obscured. b Picked duration between the zero crossings of the RSTF traces for event pair 18019/18039 (blue data points) with Doppler model fit (orange curve). Compare with the output for event pair 18024/18039 in Fig. 6(b). Results are shown on the interval \([- \pi ,3\pi ]\) as for the seismogram displays


a EGF trace output for event pair 16117/16089 (top) and the accompanying convolutional model synthetic data processed with N = 1 (middle) and N = 0.0001 (bottom). In this case a three-phase model (starting and stopping phases and one intermediate phase) was used. The traces have been duplicated and displayed on the interval \([- \pi ,3\pi ]\) to ensure that periodic effects are not obscured. b Picked duration between the zero crossings of the RSTF traces (top) for event pair 16117/16089 (blue data points) with Doppler model fit (orange curve) and the accompanying convolutional model data for N = 1 (middle) and N = 0.0001 (bottom). See results summarised in Tables 2 and 3. Results are shown on the interval \([- \pi ,3\pi ]\) as for the seismogram displays


a EGF trace output for event pair 17124/18002 (top) and the accompanying convolutional model synthetic data with N = 1 (middle) and N = 0.0001 (bottom). The traces have been duplicated and displayed on the interval \([- \pi ,3\pi ]\) to ensure that periodic effects are not obscured. b Picked duration between the zero crossings of the RSTF traces (top) for event pair 17124/18002 (blue data points) with Doppler model fit (orange curve) and the accompanying convolutional model data for N = 1 (middle) and N = 0.0001 (bottom). See results summarised in Tables 2 and 3. Results are shown on the interval \([- \pi ,3\pi ]\) as for the seismogram displays


a EGF trace output for event pair 17064/17052 (top) and the accompanying convolutional model synthetic data with N = 1 (middle) and N = 0.0001 (bottom). The traces have been duplicated and displayed on the interval \([- \pi ,3\pi ]\) to ensure that periodic effects are not obscured. b Picked duration between the zero crossings of the RSTF traces (top) for event pair 17064/17052 (blue data points) with Doppler model fit (orange curve) and the accompanying convolutional model data for N = 1 (middle) and N = 0.0001 (bottom). See results summarised in Tables 2 and 3. Results are shown on the interval \([- \pi ,3\pi ]\) as for the seismogram displays
There is a well-developed 3D model of seismic velocities over the Groningen field based on full-field 3D seismic data coverage and numerous well logs (Edwards et al. 2019). This model has been used in locating seismic events as well as being the basis for the finite difference rupture simulations described above. Processing of these synthetic data leads to a shear velocity of Vs = 2435 m/s to match the inverted value of the rupture propagation length with the model input value. We take this shear velocity as being a representative value for sub-horizontal propagation in the high-velocity evaporite layers on top of the reservoir interval and have also used it in generating the convolutional model synthetics.
The excellent azimuthal coverage of the array enables us to obtain reliable estimates of the strike direction, \(\Phi\), and distance, \(L\), of rupture propagation in cases where \(L\) is sufficiently large (the dependence of the quality of the results on \(L\) is discussed further below). To determine \(\zeta\) we need to also know \({w}_{t}\), the width of the individual pulses in the RSTF. This is difficult to determine accurately as it would require reliable picking of the maxima of the individual constituent pulses which are strongly affected by noise and tuning. The pulse half-width should be no smaller than the rise time of the constituent slip patches but will also depend on other factors, especially the band width of the data and the level of additive noise used in the deconvolution. Park and Ishii (2015) acknowledge the difficulty in determining the rise time and so neglect it, such that they underestimate \(\zeta\). Here we identify approximate bounds on the pulse width. A lower bound is provided by the band limitation of the data: as explained above, a steep anti-alias (high cut) filter from 80 to 100 Hz has been applied. If the bandwidth is \({w}_{f}=80\) Hz, then the minimum pulse width is determined by a frequency-time uncertainty relationship, \({w}_{f}{w}_{t}\ge 1\), such that \({w}_{t}\ge 1/80 =0.0125\) s. An upper bound is provided by inspection of the data: assuming \(\zeta \le c\) implies \({w}_{t}\le {A}_{1}-{A}_{2}\). Inspection of the variation of duration with azimuth for all events gives \({w}_{t}\le 0.03\) s (this can be verified from the data in Tables 2 and 3). \({w}_{t}=0.019\) s is the largest value consistent with the assumption that \(\zeta \le c\), whereas \({w}_{t}=0.017\) s corresponds to \(\zeta \le 0.9c\) as is often observed (see for example Yoshido et al. 2019). \({w}_{t}=0.017\) s is the value that has been chosen to estimate \(\zeta\) for all cases in Tables 2 and 3.
A quality measure, \(\xi\), for the parameter inversion was defined as
where \(\Sigma\) is the L1 sum of the residuals for the best fit azimuth-dependent Doppler model and \({\Sigma }_{0}\) is the corresponding sum obtained by comparing the data to the azimuth-independent average, \(\Delta t\left({x}_{i}\right)={A}_{1}\). Values of \(\xi\) range between 1 and 0 and can be used as an attribute to objectively rank the quality of the EGF inversion results. The highest values indicate the results for which the Doppler broadening expression provides the most convincing fit to the picked duration.
Figures 11 and 12 summarise the results of the Doppler fitting process for all event pairs. Notice how the quality metric, \(\xi\), depends on the rupture propagation distance, \(L\), and the average magnitude for the event pair: \(L\) determines amplitude of the azimuthal variation of the duration and the average magnitude will largely determine the signal-to-noise ratio of the seismogram data. There is a weak trend to be seen in the plot of \(\xi\) against the separation between the catalogue locations of the events comprising a pair: the largest separations correspond to low values of \(\xi\), but for small values of the separation there is a large spread of quality measure values presumably reflecting its dependence on a number of factors (\(L\), differences in source mechanism, etc.). Catalogue location uncertainties will play a part in this assessment—it is unlikely that events with very large physical separations will have high seismogram cross-correlation values. We expect to be able to refine relative location estimates using the azimuthal variation of the RSTF arrival times as explained in Appendix B.

Plots summarising the quality of the inversion of the picked RSTF durations for the Doppler broadening model parameters. In these plots the data quality metric, \(\xi\), on the vertical axis is plotted as a function of the horizontal rupture propagation distance, \(L\) (top left), average magnitude of the event pairs (top right), distance between child and parent in each event pair (bottom left), and the difference in magnitude of the event pairs (bottom right). Notice how the quality metric, \(\xi\), is strongly correlated with the rupture propagation length, \(L\), and (to a lesser degree) correlated with the average magnitude; there is a much less clear correlation with event separation. The difference in magnitudes within the pair, normally taken as a discriminant when selecting event pairs for EGF analysis, is not a determinant of the quality of the sinusoidal fitting process

Plots summarising the results of the inversion of the picked RSTF durations for the Doppler broadening model parameters and related rupture parameter estimates. In the top row, maximum magnitude of the pair of events is plotted on the vertical axis against the estimated values of (left) dip direction rupture length, \({L}_{D}\), and (right) average slip velocity, \(\overline{v }\). In the bottom row rupture propagation velocity, \(\zeta\), is plotted on the horizontal axis against (left) the horizontal rupture propagation distance, \(L\), and (right) the average slip velocity, \(\overline{v }\)
For a subset of the processed event pairs, convolutional model synthetics were generated as described above to demonstrate a reasonable visual match between the synthetic and field data RSTFs and explore to what extent the deconvolution data processing workflow recovers the input parameters. Table 1 gives the input and inverted values of rupture propagation strike and horizontal distance. Inversion results are given for deconvolution noise levels N = 1, the chosen default for the field data, and N = 0.0001, a very low noise level which would only serve to stabilise the spectral division. Source offset ranges (\(\Delta\)) and angles (\(\Psi\)) are defined above Eqs. (21) and (22) and were determined by a simple trial and error process to obtain a good visual match to the corresponding real data RSTF. In Appendix B it is shown that the duration is independent of \(\Delta\) and \(\Psi\). Note how the lower noise value generally gives a better recovery of the input parameters. With a vanishingly small N, all convolutional factors common to both events cancel as shown in Eqs. (4)–(6): this applies to filters applied in processing as well as to propagation and instrumentation effects. On the real data cases we found there is a trade-off between stability of the arrival picking (achieved with higher N) and the good temporal resolution (lower N) needed for accurate recovery of the underlying rupture characteristics. Processing of the convolutional model synthetics allows the impact of the choice of N value to be assessed. Notice also how the duration is dependent on the width of the individual constituent pulses, but the ratio \({A}_{2}=L/c\) which determines the range of the azimuthal variation of the duration is independent of this.
In Fig. 13 we demonstrate consistency between the convolutional model and finite difference simulation for a simple case of an event pair with the larger rupture a unilaterally propagating two-phase rupture, with the starting and stopping phases each of the same slip patch size as the smaller rupture. The magnitudes in the finite difference simulation are 3.4 and 1.7; source coordinates are {245,493, 597,742, 2950} and {245,585, 597,620, 2950}, respectively; rupture dimensions are 355 m × 355 m and 50 m × 50 m, respectively. The strike of the rupture propagation vector is − 53° with respect to N and the horizontal rupture propagation distance is 305 m. Rupture propagation velocity is \(\zeta =2435\) m/s. The EGF deconvolution workflow and Doppler parameter inversion process give a rupture vector strike direction of − 52° and a horizontal rupture propagation distance of 306 m if the effective shear velocity is taken as 2435 m/s.

EGF trace output for a synthetic event pair with magnitudes 3.4 and 1.7, generated using the finite difference approach (upper plot) described here. Rupture dimensions are 355 m × 355 m and 50 m × 50 m and the strike of the rupture propagation vector is − 53° with respect to N. Rupture propagation velocity is \(\zeta =2435\) m/s. Considering the large rupture as consisting of a starting and stopping phase, each with the same slip patch size as the small rupture, this implies a horizontal rupture distance of 305 m. The EGF deconvolution workflow and Doppler parameter inversion process give a rupture vector strike direction of − 52° and a horizontal rupture propagation distance of 306 m if the effective shear velocity is taken as 2435 m/s. The lower plot shows the comparison with the convolutional model with the same input model parameters, both processed with N = 1
More sophisticated finite difference simulations of causally connected slip patches stochastically distributed across the fault plane were also run. An example of the RSTF obtained from one such model is shown in Fig. 14. This simulation was for a model of bilateral rupture propagation initiated at the middle of the rupture surface. Parent and child horizontal rupture patch lengths are again 355 m and 50 m, respectively, such that L = 152.5 m; the strike of the rupture propagation vector is − 53° from N. The rupture velocity varies stochastically across the rupture surface with values distributed about \(\zeta =2400\) m/s. The subsurface velocity model is unchanged. Due to the more complex nature of the composite rupture propagation and the resulting stochastic distribution of slip across the rupture plane, the RSTF shows greater variability than the simple convolutional model synthetics. In Fig. 14 the picked duration is compared with the simple bilateral model of Eq. (25) with the same input parameter values and arguably shows the same approximate periodicity. A tentative conclusion is that this extra richness of modelled rupture behaviour is not required to explain the clearest cases of Doppler broadening shown here (that is those cases with the highest values of \(\xi\)).

The upper plot shows the EGF trace output for a finite difference simulation of horizontal bilateral rupture propagation. The lower plot shows the picked durations as a function of azimuth and the fit to the bilateral propagation model of Eq. (25) obtained with parameters L = 153 m, c = 2435 m/s, Φ = 135° from N in reasonable agreement with the model input parameters detailed in the text. Comparing the bi-lateral model in Eq. (25) with the data according to Eq. (11) gives ξ = 0.15 for this choice of parameters (the azimuth independent mean duration is L/ζ + \({w}_{t}\)+ 2L/πc for the bilateral model). In comparing the model to the data, values of duration greater than 0.20 s have been rejected as outliers originating from the regions of unstable picks visible on the trace display
7 Interpretation and discussion of results
For the highest quality results, the azimuthal Doppler broadening of the source time function is clear to see on the seismic panels, as shown in Figs. 6(a), 7(a), 8(a), 9(a) and 10(a). In most cases we also see the superposed undulation of the arrival times with azimuth, characteristic of an offset between the two events. The propagation directions correspond very well with the details of the underlying fault network (Fig. 15) obtained by interpreting the 3D data and refined using an automatic discontinuity detection algorithm applied to seismic attribute volumes (Kortekaas and Jaarsma 2017). For the 10 highest quality event pair results, characterised by \(\xi \ge 0.5\), only 15062/15065 does not show a convincing alignment of the rupture vector with a nearby feature of the fault map. This, the most westerly of the event pairs on the first subplot of Fig. 15, has a poor azimuthal coverage due to being close to the edge of the monitoring array. The correspondence with the mapped fault directions worsens as we go to lower values of the quality measure \(\xi\), as shown in the other subplots of Fig. 15.

Scaled horizontal rupture vectors overlain on the fault map. In each of these plots, the base map shows the detailed fault interpretation generated by Kortekaas and Jaarsma (2017). The outline of the gas field is shown as a blue contour. The vectors give only the horizontal rupture propagation direction (vectors are drawn with a constant length), obtained from the inversion of the picked durations. The top left plot shows the 10 highest quality event pairs for which \(\xi \ge 0.5\); top right, the 22 event pairs with \(\xi \ge 0.25\); bottom left, all 31 remaining event pairs with \(0.25>\xi \ge 0\); bottom right, the base fault map and field outline without events
Where events form correlated clusters of more than two events, it is interesting to observe the occurrence of opposing rupture propagation directions. See especially the cluster with event IDs 18039/18024/18019/18096. Tables 2 and 3 shows that these results are however not contradictory—where there is more than one analysis for a given parent event, the rupture azimuths and lengths obtained are consistent. We assume that correlated events will have rupture propagation vectors parallel or anti-parallel to each other, aligning with a common host fault. It can be seen that adding \(\pi\) to the rupture strike \(\Phi\) is equivalent to changing the sign of the corresponding rupture distance L in Eq. (29). Having aligned all rupture directions in a cluster in this way, the set of coefficients of the cosine terms in Eq. (29) from all event pairs in the cluster can be inverted for the individual event rupture distances. In the case of the event cluster 18039/18024/18019/18096, the problem is overdetermined such that average values can be obtained. These cluster-derived values, as listed in Table 4 in the Appendix, are then preferred to the raw summed values in Tables 2 and 3. Figures 11, 12 and 15 however show compilations of the Doppler inversion results for the event pairs and so do not include these cluster refinements for individual rupture propagation lengths.
From a geomechanical perspective, the observed range of horizontal rupture propagation distances, \(L\), helps constrain estimates of the dimensions of the ruptures. Using the value of \(L\) and the catalogue magnitudes, we estimate the dip direction extent of the rupture, \({L}_{D}\), using the usual simple relationship between rupture area, stress drop, and seismic moment (Beresnev 2001). We take the rupture length in the horizontal direction to be the sum of the slip patch length of the smaller event (assumed to be square) and the EGF-derived rupture propagation distance. We then estimate the rupture extent in the dip direction as the length required to give the catalogue (moment) magnitude of the larger event for an assumed value of stress drop. To do this we take the effective relationship for the shear modulus in terms of the average normal faulting slip displacement U and stress drop \(\Delta \sigma\) derived from seismological observations as \(\mu \approx {L}_{D}\Delta \sigma /U\) (Beresnev 2001), thereby assuming that the shape-dependent factor in the stress–strain relationship is approximately 1 (Kanamori and Anderson 1975; Noda et al. 2013). The first subplot in Fig. 12 shows the estimated dip-direction rupture extent against the magnitude of the larger event for an assumed stress drop of 7 MPa (Edwards et al. 2019). For all but the largest magnitude event (the M = 3.4 event of 8th January 2018), the estimated dip-direction rupture extent is sufficiently small to be contained wholly within the reservoir which is some 200 m thick over most of the field (De Jager and Visser 2017). This largest magnitude event (18002) has been located with full waveform inversion (Willacy et al. 2018) its location placing it on a mapped fault with fault plane dip varying between 67 and 84°. Of the two focal mechanism solutions for the slip vector, the one which is consistent with the mapped fault has a dip of 73°. From Table 3, the minimum estimate of the dip direction rupture extent for the event is 380 m. With a dip angle of 67° or greater, this gives a vertical projection of at least 350 m. This contrasts with the mapped Rotliegend reservoir thickness at the event location of about 275 m and the throw of about 40 m, totalling 315 m. These estimates of rupture dimensions have been made using an assumed value of stress drop taken from the work by Edwards et al. (2019), which is based on a subset of events from the Groningen catalogue: there is considerable scatter in those stress drops but we find that repeating the exercise with their lower and upper logic tree branch values of 5 MPa and 10 MPa does not change the general conclusion regarding containment of the events in the reservoir.
An alternative approach may be to use an empirical scaling relationship between fault length and width, such as presented by Leonard (2010), obtained by fitting slip models to a large number of seismological datasets (see also Leonard 2012). Leonard (2010) shows a good match to his compendium of normal and reverse dip-slip fault data with \({L}_{D}=C{L}_{S}^{2/3}\) for \(C=1.7\). It can however be shown that estimating \({L}_{D}\) from this simple relationship requires wildly varying stress drops if the relationship between moment, rupture area, and stress drop is to be preserved. Moreover, Leonard (2010) does not consider data for faults shorter than 2 km raising the question of whether the relationships obtained are representative of reservoir-scale seismicity. On the other hand, the stress drops presented by Edwards et al. (2019) are estimated from Groningen-induced earthquake data and so should be applicable.
The EGF relative source time functions are (in principle) free from the amplitude effects of spreading and absorption thanks to the deconvolution and are therefore well suited to the determination of corner frequencies and related quantities. Beresnev (2002) shows that, for a source time function which radiates a frequency-squared far-field spectrum, the corner frequency fc can be related to the maximum slip velocity, without further assumptions, as follows (where \(e\) is the base of natural logarithms, \(A\) is the rupture area, and \({M}_{0}\) the scalar seismic moment):
For a finite rupture such as we consider here comprised of multiple slip patches, causally linked, we should not assume the simple source time function given by Beresnev (2002). Nevertheless, the spatially averaged slip displacement divided by the time over which the slip develops should be an approximate average slip velocity, \(\overline{v }\). The measured duration of the RSTF is the sum of the finite duration of the constituent pulses after deconvolution and the rupture propagation time; this will span the processes of initiation, propagation, and arrest such that, \(\overline{v }\ge U/\Delta t\). Again using \(\mu \approx {L}_{D}\Delta \sigma /U\), we estimate a lower bound on the slip velocity from the RSTF duration (the value perpendicular to the rupture vector has been used):
Figure 12 illustrates the range of slip and rupture velocity values obtained, assuming \({w}_{t}=0.017\) s and \(\Delta \sigma =\) 7 MPa. Note how rupture velocity increases with horizontal rupture distance—the higher rupture propagation velocities are only reached on the longer ruptures. Weng and Ampuero (2019) have presented a model of bounded rupture propagation with an inertial term giving rise to acceleration of the rupture, which could explain this behaviour. Slip velocities, in line with the estimate given by Beresnev (2001), are generally about 3 orders of magnitude smaller than the rupture propagation velocity, \(\zeta\). Recent dynamic rupture simulations by Buijze et al. (2019) and laboratory measurements by Hunfeld et al. (2017) also support the range of slip velocity values given here but emphasise the sensitivity of the slip velocity to the detailed variation of fault friction properties.
The kinematic model seismograms have been used as a guide to our interpretation of the data, helping to visualise the effect of a range of scenarios, demonstrating qualitative as well as quantitative correspondence with the real data by comparison of input and inverted parameter values. Figures 6(a), 8(a), 9 (a) and 10(a) show comparison of RSTF output generated for real and synthetic data for some selected event pairs. It should be emphasised that we have in all cases fitted a model of unilateral rupture propagation to the data. In the most striking cases (event pairs with the highest values of \(\xi\)), the sinusoidal variation of the duration with a period of \(2\pi\) seems to be inescapable. None of the event pairs processed show clear evidence for a superposed second sinusoidal variation (see Eq. (26)) characteristic of bilateral propagation (event pairs 18019/18024 and 18066/18065 are possible exceptions). Several authors, for example Folesky et al. (2016), have noted a predominance of unilateral rupture propagation. King and Nabelek (1985) argue that ruptures tend to run between bends and junctions in a fault network such that individual events tend to be characterised by unilateral rupture propagation. Referring to Fig. 15 it can be seen that many of the plotted rupture propagation vectors do initiate on a recognisable fault junction. The Haskell finite rupture model may then be a good approximate description, although it is accepted that it violates the physical requirements of continuity at the rupture boundary and finite rupture propagation velocity in the direction perpendicular to the length. The model of Imanishi and Takeo (2002) suggests an alternative explanation for the observation of apparent unilateral propagation which avoids the physical difficulties of the Haskell model. At higher frequencies, seismograms will be dominated by radiation from accelerating and decelerating phases of the rupture—the starting and stopping phases. Imanishi and Takeo (2002) show how a rupture propagates from an initiation point and then radiates strongly from stopping phases where the rupture front is tangent to the eventual boundary of the rupture. This is a potential means of linking a natural description of rupture propagation with the RSTFs we see but would be strongly dependent on the specifics of the geometry of the fault boundary relative to the rupture initiation point. Nevertheless, as a conceptual model, it could explain why the very simple model we use here fits the data well. This however comes at the price of obscuring the connection between the observed horizontal rupture propagation length and the rupture extent. If the Imanishi and Takeo (2002) model were adopted as an interpretational paradigm, the observed value of \(L\) would have to be seen as a lower limit on the horizontal rupture propagation distance. Horizontal rupture propagation over greater distances could occur but without additional stopping phases being detectable by our network of sensors. Strike- and dip-direction extents calculated as above would then be seen as lower and upper bounds, respectively. Our observations would then not conflict with the possibility of all ruptures being contained within the reservoir but, equally, it would not be possible to rule out propagation of the largest event into the Carboniferous interval below the Rotliegend reservoir.
Savage (1965) argues that, for unilateral rupture propagation, the azimuthal variation of the amplitude of first motion is the inverse of the expression for Doppler broadening of the duration of the source time function. Folesky et al. (2016) use this result to interpret seismic data from the Basel geothermal project. Despite the excellent azimuthal coverage of the Groningen array, we were unable to invert measured amplitudes of the RSTFs for the parameters \(\left\{L,\zeta ,\Phi \right\}\) with any degree of confidence. Noise, differences in azimuths of the focal mechanisms of the paired events, and loss of true relative amplitude in the deconvolution workflow are expected to disrupt the underlying azimuthal dependence of measured amplitudes of the RSTF. The duration, measured between zero crossings, is however largely insensitive to these effects. Abercrombie (2015) presents an analysis of the factors affecting source parameter estimation from spectral analysis of RSTFs and concludes that high-quality EGFs, with only minimal offsets between parent and child events, are needed. Abercrombie et al. (2017) show robust results from analysis of the RSTF duration determined for pairs of azimuths by cross-correlation with a modelled stretch applied.
Ameri et al. (2020) selected the 21 events in the Groningen catalogue with ML ≥ 2.0 for a spectral directivity analysis, not using the EGF method. Of these only five feature in our subset of highly correlated event pairs (Table 2) and only for two of these five common events were directivity effects observed by Ameri et al. (2020). For these two events (20170527_152900 (ID 17052) and 20180108_140052 (ID 18002)), their results are in fair agreement with ours: Ameri et al. (2020) find (respectively) \(\Phi =203^\circ {\text{and}} 283^\circ\) compared with our results of \(\Phi =188^\circ and 305^\circ\). For two of the other three events, Ameri et al. (2020) observed no directivity effect; in our analyses these events belong to pairs which were assigned low values of the quality parameter, \(\xi \le 0.23\). The remaining common event is interesting. Ameri et al. (2020) put it in an “unknown” category of events for which “… the limited number of records does not allow to identify whether rupture directivity occurred…”. In our analysis, this is the anomalous event in the west of the field (top left panel of Fig. 15) which has a high value of the quality parameter, \(\xi =0.58\), but a rupture propagation strike which does not align with a feature on the fault map. As proposed above, and consistent with the categorisation by Ameri et al. (2020), this is we believe due to poor azimuthal coverage of the event location. Overall, we see at least qualitative agreement with the work of Ameri et al. (2020) although the overlap of the subsets of data analysed is limited.
8 Conclusions
We have applied an empirical Green’s function deconvolution workflow to 53 pairs of correlated events in the Groningen-induced earthquake catalogue. Measurements of the azimuthal variation of the duration of the relative source time functions (the Doppler effect) have been inverted to give the horizontal rupture propagation azimuth and distance. A quality measure, derived from the L1-norm of the residuals of the data compared to the Doppler model, enables us to rank the individual results. We have interpreted our results in the light of a simple convolutional model of composite rupture and show that finite difference simulations generate results which are consistent with this. The finite difference kinematic rupture simulations can be used to explore the characteristics of a wider range of more sophisticated models of causally connected slip patches distributed across a fault plane.
We see clear evidence of the rupture propagation for many of the event pairs analysed. For the highest quality results, we observe convincing alignment of the propagation vectors with the detailed underlying fault map obtained from the 3D seismic data volume covering the field. The relative source time functions are consistent with a simple kinematic model of unilateral rupture propagation between dominant starting and stopping phases. Event pairs 16117/16089 and 16118/16089 have a distinct intermediate phase in the RSTF which can be best explained by a three-phase parent event.
For all but one of the parent events analysed (the event of 8th January 2018), the estimated dip direction rupture size is sufficiently small to be contained within the reservoir. Our estimates of slip velocities (of the order of 0.1 to 1 m/s) and rupture velocities (up to about 0.9 of the shear velocity) are consistent with other published studies but depend on some assumptions. We have obtained useful results from the Doppler analysis by relaxing the usual restrictions that EGF event pairs be precisely co-located and with a magnitude difference of at least 1. We admit all pairs showing a high degree of seismogram correlation and assume that in the few cases where such pairs have a large separation between catalogue locations, there is scope for relative location refinement.
We find that the duration of the relative source time function, between picked zero crossings, is a particularly robust attribute which is independent of the offset between the pair of events. We show how the azimuthal variation of the arrival times of the RSTF’s zero crossings could be inverted to estimate the offset between the events, emphasising the connection between the EGF deconvolution workflow and other correlation-based analyses such as double differencing and full waveform inversion. Additive noise is required to stabilise the deconvolution, but this also means that the removal of the path effects by the deconvolution is then no longer exact: this limits the accuracy with which input parameters can be recovered from synthetic data. On the other hand, a high level of additive noise allows useful approximate results to be generated for a broader class of event pairs. An intermediate value N ≈ 1 seems to be a Goldilocks value combining these benefits.
The dataset analysed is available in the public domain and, given its excellent azimuthal coverage of the source region, would reward further processing efforts. Our results leave open questions, some of which could be addressed by systematically exploring the effect of varying the parameters of the deconvolution workflow and potentially embedding the method in a broader full waveform processing and inversion scheme. This would require greater automation of the method which was beyond the scope of our study. We have interpreted our results in the light of a simplistic unilateral rupture model. Although this model produces synthetic data displaying the main characteristics seen in the field data, it is purely kinematic and gives no insight into the rupture dynamics. Extending the 2D dynamic rupture simulations of Buijze et al. (2019) into 3D would improve our understanding of the relevant mechanisms. Although we found time domain amplitude variations with azimuth much less stable than the corresponding duration variations, frequency domain analysis using the directivity function method (Udías et al. 2014) may be sufficiently robust to provide essentially independent estimates of the rupture propagation parameters.
Data availability
The seismogram data used to generate our results is available from the KNMI Seismic and Acoustic Data Portal (KNMI 1993).
KNMI (1993) Netherlands Seismic and Acoustic Network. Royal Netherlands Meteorological Institute (KNMI). https://doi.org/10.21944/e970fd34-23b9-3411-b366-e4f72877d2c5.
References
Abercrombie RE (2015) Investigating uncertainties in empirical Green’s function analysis of earthquake source parameters. J Geophys Res: Solid Earth 120:4263–4277
Abercrombie RE, Poli P, Bannister S (2017) Earthquake directivity, orientation, and stress drop within the subducting plate at the Hikurangi margin, New Zealand. J Geophys Res: Solid Earth 122(10):10176–10188
Ameri G, Martin C, Oth A (2020) Ground-motion attenuation, stress drop, and directivity of induced events in the Groningen gas field by spectral inversion of borehole records. Bull Seismol Soc Am 110(5):2077–2094
Arrowsmith SJ, Eisner L (2006) A technique for identifying microseismic multiplets and application to the Valhall field. North Sea Geophysics 71(2):v31–v40
Beresnev IA (2001) What we can and cannot learn about earthquake sources from the spectra of seismic waves. Bull Seismol Soc Am 91(2):397–400
Beresnev IA (2002) Source parameters observable from the corner frequency of earthquake spectra. Bull Seismol Soc Am 92(5):2047–2048
Berkhout AJ (1977) Least-squares inverse filtering and wavelet deconvolution. Geophysics 42(7):1369–1383
Bourne SJ, Oates SJ (2017) Extreme threshold failures within a heterogeneous elastic thin-sheet and the spatial-temporal development of induced seismicity within the Groningen gas field. J Geophys Res: Solid Earth 122(10):10299–10320
Bourne SJ, Oates SJ, van Elk J (2018) The exponential rise of induced seismicity with increasing stress levels in the Groningen gas field and its implications for controlling seismic risk. Geophys J Int 213(3):1693–1700
Buijze L, van den Bogert PAJ, Wassing BBT, Orlic B (2019) Nucleation and arrest of dynamic rupture induced by reservoir depletion. J Geophys Res: Solid Earth 124(4):3620–3645
Cesca S, Heimann S, Dahm T (2011) Rapid directivity detection by azimuthal amplitude spectra inversion. J Seismolog 15:147–164
Daniel G, Fortier E, Romijn R, Oates S (2016) Location results from borehole microseismic monitoring in the Groningen gas reservoir, Netherlands. 6th EAGE Workshop on Passive Seismic, Muscat, Oman
De Jager J, Visser C (2017) Geology of the Groningen field – an overview. Geol Mijnbouw/Netherlands J Geosci 96(5):s3–s15
Dost B, Ruigrok E, Spetzler J (2017) Development of seismicity and probabilistic hazard assessment for the Groningen gas field. Geol Mijnbouw/Netherlands J Geosci 96(5):s235–s245
Dost B, van Stiphout A, Kühn D, Kortekaas M, Ruigrok E, Heimann S (2020) Probabilistic moment tensor inversion for hydrocarbon-induced seismicity in the Groningen gas field, the Netherlands, Part 2: Application. Bull Seismol Soc Am 110(5):2112–2123
Edwards B, Zurek B, van Dedem E, Stafford PJ, Oates S, van Elk J, deMartin B, Bommer JJ (2019) Simulations for the development of a ground motion model for induced seismicity in the Groningen gas field, The Netherlands. Bull Earthq Eng 17:4441–4456
Folesky J, Kummerow J, Shapiro SA, Häring M, Asanuma H (2016) Rupture directivity of fluid-induced microseismic events: observations from an enhanced geothermal system. J Geophys Res: Solid Earth 121:8034–8047
Graves R, Pitarka A (2016) Kinematic ground-motion simulations on rough faults including effects of 3D stochastic velocity perturbations. Bull Seismol Soc Am 106(5):2136–2153
Havskov J, Alguacil G (2004) Instrumentation in earthquake seismology. Springer, Dordrecht
Hunfeld LB, Niemeijer AR, Spiers CJ (2017) Frictional properties of simulated fault gouges from the seismogenic Groningen gas field under in situ P-T chemical conditions. J Geophys Res: Solid Earth 122:8969–8989
Hutchings L, Viegas G (2012) Application of empirical Green’s functions in earthquake source, wave propagation and strong ground motion studies. In: D’Amico S (ed) Earthquake Research and Analysis - New Frontiers in Seismology. InTech, London, pp 87–140
Imanishi K, Takeo M (2002) An inversion method to analyze rupture processes of small earthquakes using stopping phases. J Geophys Res 107(B3):2048
Jagt L, Ruigrok E, Paulssen H (2017) Relocation of clustered earthquakes in the Groningen gas field. Neth J Geosci 96(5):s163–s173
Kanamori H, Anderson DL (1975) Theoretical basis of some empirical relations in seismology. Bull Seismol Soc Am 65(5):1073–1095
King G, Nabelek J (1985) Role of fault bends in the initiation and termination of earthquake rupture. Science 228:984–987
KNMI (1993) Netherlands Seismic and Acoustic Network. Royal Netherlands Meteorological Institute (KNMI). https://doi.org/10.21944/e970fd34-23b9-3411-b366-e4f72877d2c5
Kortekaas M, Jaarsma B (2017) Improved definition of faults in the Groningen field using seismic attributes. Neth J Geosci 96(5):s71–s85
Kraaijpoel DA, Dost B (2013) Implications of salt-related propagation and mode conversion effects on the analysis of induced seismicity. J Seismolog 17(1):95–107
Kühn DS, Heimann MP, Isken E, Ruigrok E, Dost B (2020) Probabilistic moment tensor inversion for hydrocarbon-induced seismicity in the Groningen gas field, The Netherlands, Part 1: Testing. Bull Seismol Soc Am 110(5):2095–2111
Leonard M (2010) Earthquake fault scaling: Self-consistent relating of rupture length, width, average displacement, and moment release. Bull Seismol Soc Am 100(5A):1971–1988
Leonard M (2012) Erratum to Earthquake fault scaling: self-consistent relating of rupture length, width, average displacement, and moment release. Bull Seismol Soc Am 102(6):2797–2797
Li Y, Toksoz M, Rodi W (1995a) Source time functions of nuclear explosions and earthquakes in central Asia determined using empirical Green’s functions. J Geophys Res 100:659–674
Li Y, Doll C, Toksöz MN (1995b) Source characterization and fault plane determination for MbLg = 1.2 to 4.4 earthquakes in the Charlevoix Seismic Zone, Quebec, Canada. Bull Seismol Soc Am 85(6):1604–1621
Noda H, Lapusta N, Kanamori H (2013) Comparison of average stress drop measures for ruptures with heterogeneous stress change and implications for earthquake physics. Geophys J Int 193(3):1691–1712
Park S, Ishii M (2015) Inversion for rupture properties based upon 3-D directivity effect and application to deep earthquakes in the Sea of Okhotsk region. Geophys J Int 203(2):1011–1025
Savage JC (1965) The effect of rupture velocity upon seismic first motions. Bull Seismol Soc Am 55(2):263–275
Spetzler J, Dost B (2017) Hypocentre estimation of induced earthquakes in Groningen. Geophys J Int 209(1):453–465
Spica ZJ, Nakata N, Liu X, Campman X, Tang Z, Beroza GC (2018) The ambient seismic field at Groningen gas field: an overview from the surface to reservoir depth. Seismol Res Lett 89(4):1450–1466
Tomic J, Abercrombie RE, do Nascimento AF (2009) Source parameters and rupture velocity of small M≤2.2 reservoir induced earthquakes. Geophys J Int 179(2):1013–1023
Udías A, Madariaga R, Buforn E (2014) Source mechanisms of earthquakes: theory and practice. Cambridge University Press, Cambridge
van Dedem E, Willacy C, Blokland JW, Piesold T, Minisini S (2018) Full waveform event location and cluster analysis for Groningen induced seismicity. 80th EAGE Conf Exhibition 2018, Copenhagen, Denmark
van Elk J, Bourne SJ, Oates SJ, Bommer JJ, Pinho R, Crowley H (2019) A probabilistic model to evaluate options for mitigating induced seismic risk. Earthq Spectra 35(2):537–564
Wang E, Rubin AM, Ampuero JP (2014) Compound earthquakes on a bimaterial interface and implications for rupture mechanics. Geophys J Int 197(2):1138–1153
Weng H, Ampuero JP (2019) The dynamics of elongated earthquake ruptures. J Geophys Res: Solid Earth 124:8584–8610
Willacy C, van Dedem E, Minisini S, Li J, Blokland JW, Das I, Droujinine A (2018) Application of full-waveform event location and moment-tensor inversion for Groningen induced seismicity. Lead Edge 37(2):92–99
Willacy C, van Dedem E, Minisini S, Li J, Blokland JW, Das I, Droujinine A (2019) Full-waveform event location and moment tensor inversion for induced seismicity. Geophysics 84(2):KS39–KS57
Willacy C, Blokland JW, van Dedem E (2020) Automating event location monitoring for induced seismicity. Lead Edge 39(7):505–512
Yoshido K, Saito T, Emoto K, Urata Y, Sato D (2019) Rupture directivity, stress drop, and hypocenter migration of small earthquakes in the Yamagata-Fukushima border swarm triggered by upward pore-pressure migration after the 2011 Tohoku-Oki earthquake. Tectonophysics 769:228184
Zurek B, deMartin B (2019) Using waveform simulations to help constrain kinematics of small earthquakes at the Groningen gas field. AGU Fall Meet 2019, San Francisco, USA
Zurek B, Burnett W, Dedontney N, Gist G (2017) The effect of modeling kinematic finite faults on deterministic formulation of ground motion prediction equations – Groningen an induced seismicity case study. SEG Int Exposition 87th Annu Meet, 2017, Houston, USA
Acknowledgements
We would like to thank NAM, ExxonMobil and Shell for encouraging and facilitating this joint project and giving permission to publish our results. We are very grateful to Jan van Elk, Peter van den Bogert, Rick Wentinck, Stephen Bourne, Julian Bommer, Bernard Dost and Elmer Ruigrok for constructive discussions on the interpretation of our results. Marloes Kortekaas of EBN kindly shared the underlying fault map (Kortekaas &; Jaarsma 2017) used to generate the overlay plots of our results (Fig. 15). We are grateful to Rachel Abercrombie and three anonymous reviewers for their constructive comments on earlier versions of this manuscript which have helped us improve a number of aspects of our paper.
Author information
Authors and Affiliations
Contributions
S.O. set-up and ran most of the data processing, developed the convolutional rupture models and drafted the manuscript.
J.S. played a significant role in adapting the methodology for this application and interpreting the results, and also contributed to writing the manuscript.
B.Z. developed and carried out the finite difference kinematic rupture simulations, and contributed to writing the manuscript.
T.P. initially applied the Empirical Green’s Function method on a subset of the correlated events thereby demonstrating that the data is amenable to this analysis, and contributed to reviewing and editing the manuscript.
E.v.D. set-up and ran the search for the subset of correlated events, supplied the seismogram data in a suitable form and contributed to reviewing and editing the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Brian Zurek Currently unaffiliated.
Highlights
• Pairs of Groningen-induced earthquakes have been analysed to reveal details of the propagation of the ruptures.
• Estimated rupture dimensions are consistent with all but one event being able to be contained within the reservoir.
• The earthquake rupture propagation directions found are consistent with the faults mapped on 3D seismic images.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Appendices
Appendix A: catalogue of event pairs and summary of results of analysis
Tables 2 and 3 catalogue all event pairs processed with the EGF deconvolution workflow and the results derived. “Child” and “parent” refer to smaller and larger events, respectively. Table 4 gives the refinements of rupture propagation lengths for correlated clusters of three or more events.
Appendix B: angle dependent durations of RSTFs for simple kinematic models
Here we give derivations of expressions for the duration of the RSTF as a function of the azimuthal angle for simple model scenarios as illustrated in Fig. 3(a) and (b). A number of the below expressions can be found in Savage (1965), Li et al. (1995b), and Cesca et al. (2011). The objective here is to provide a self-contained presentation with a consistent notation which clearly states the assumptions being made.
Synthetic seismograms are generated using the convolutional model of the seismic trace. Considering an EGF pair of events, the seismogram of the larger composite event (direct P or S arrivals only) can be written as a sum of the two slip patch contributions
where \(W\left({x}_{i},t\right)\) is the source wavelet assumed common to both phases, and \({x}_{i}\) represents the coordinates of the \({i}^{{\text{th}}}\) station as shown in Fig. 3(a) and (b). It is assumed here that the ray arrives at the geophone stations approximately vertically after initial sub-horizontal propagation from the source (see Kraaijpoel and Dost 2013; Jagt et al. 2017); the travel time of the sub-vertical leg of the propagation will, to a good approximation, be common to all such rays at a given station and hence will drop out of the analysis. The smaller event is assumed to be a single phase with the same source wavelet and focal mechanism, collocated with the starting phase of the larger event
Performing the EGF deconvolution as described above and making use of the sift property of the delta function under convolution, \(f\left(t\right)*\) \(\delta \left(t-T\right)=f\left(t-T\right)\), give
For this idealised RSTF comprising two delta functions, the duration is
This is the expression given by Savage (1965) and others (e.g. Li et al. 1995b) for the angle-dependent event duration in the case of unilateral rupture propagation. It can be seen as an example of angle-dependent Doppler broadening. For realistic band-limited pulses and duration measured between zero crossings, the width, \({w}_{t}\), of the individual pulses needs to be added to this expression for the duration:
Intermediate slip patches can be inserted between the starting and stopping phases without changing the azimuthal dependence of duration of the RSTF. Moreover, if there is an offset between the two nominally collocated sources, we find that this introduces a second azimuthally variant term to the arrival times but does not change the duration for the assumed homogeneous subsurface. If \({Rg}_{i}\) is the epicentral distance between the smaller source and the \({i}^{{\text{th}}}\) receiver station (Fig. 3(a)) and \({Rg}_{i}\ne {Rs}_{i}\), then
and
The terms \({Rg}_{i}/c\) cancel when calculating the duration so that the RSTF duration is independent of the offset of the smaller source. In reality, the cancellation of propagation terms shown in Eq. (3) will deteriorate with increasing offset, consistent with the findings of Abercrombie (2015). If the distance of the smaller source from the epicentre of the larger source is \(\Delta\) and the azimuth of the offset vector relative to the strike direction of the larger event is \(\Psi\), following the above steps we can express the arrival times of the two pulses as
and
This highlights the close connection between EGF and relative event location methods. The above expressions could be used to invert the azimuthally varying arrival times for the source offset parameters, \(\Delta\) and \(\Psi\), extending the scope of the usual EGF workflow to also generate relative event location refinements.
We can similarly construct the RSTF for bi-lateral propagation, with a central starting phase giving rise to a pair of stopping phases at opposite ends of the fault trace, \({Re}_{i}\) and \({Re^{\prime}}_{i}\) from the \({i}^{{\text{th}}}\) station (Fig. 3(b)):
The duration of the RSTF is obtained as the maximum value of the time difference between pairs of arrivals. For this idealisation of bilateral rupture propagation, we obtain the following expression for the duration as a function of the azimuthal angle:
This can be further generalised to cover the case of bilateral propagation where the fault trace lengths in the two directions are different (\(L\) and \(L^{\prime}\) say) and the rupture propagation velocities are also allowed to be different (\(\zeta\) and \(\zeta ^{\prime}\)). In this case of asymmetric bilateral propagation, the duration is
Note that this expression reduces to the previous cases of symmetric bilateral propagation for \(L={L}^{\prime}; \zeta =\zeta^{\prime}\) and unilateral propagation for \({L}^{\prime}=0\). A distinguishing characteristic of bilateral propagation is that the duration will have two local maxima aligned with the two arms of the rupture. In the case that \(L=L^{\prime}\) and \(\zeta =\zeta^{\prime}\), the duration is expected to be periodic on the interval \([0,\pi ]\), rather than \([\mathrm{0,2}\pi ]\) as in the unilateral case.
A further generalisation to consider in support of the event pairs analysed is the case of an event pair of similar magnitudes. In this case we should consider the possibility that the smaller event should also be treated as an extended rupture. Primed variables \(\left\{{R^{\prime}s}_{i},{R^{\prime}e}_{i},L^{\prime},{\zeta }^{\prime},{{\phi }^{\prime}}_{i},{r^{\prime}}_{i},{\theta^{\prime}}_{i}\right\}\) refer to the smaller event in such a scenario and are the analogues of \(\left\{{Rs}_{i},{Re}_{i},L,\zeta ,{\phi }_{i}{,r}_{i},{\theta }_{i}\right\}\) in Fig. 3(a). The seismogram for the smaller event is
Although it can be demonstrated numerically that this composite seismogram has at least an approximate inverse, the convolutional inverse cannot be written using a simple algebraic expression such as used to obtain Eq. (16). Referring to Eq. (5), it can be seen that the limit of very high additive deconvolution noise (\(N\gg 1\)) can be expressed in simple algebraic terms since the output generated by the deconvolving function reduces to a scaled convolution of the pair of seismograms.
and hence, in this limit,
If \({\phi ^{\prime}}_{i}\approx {\phi }_{i}\) and \(\zeta ^{\prime}=\zeta\) this reduces to
That is, for this idealisation in which a pair of parallel composite ruptures are processed with the EGF deconvolution workflow with the application of very high additive noise, the duration expression is of the same form as before but proportional to the sum of the rupture propagation distances of the two events.
In the main body of the text, it is explained that the RSTF should be approximately the same for all depth levels and components of the same surface station, since the spectral division removes all effects common to both seismograms, including path and coupling effects. In the data processing workflow the RSTFs are summed over all geophone levels (50 m, 100 m, 150 m, 200 m) and components (X, Y, Z) of a station to improve the signal to noise ratio of the result. To demonstrate this, Fig. 16 compares the summed RSTFs with the individual RSTFs for each geophone for event pair 17123/18002. A different style of display from the previous figures was found useful here. The RSTF data are sorted on component type (11 = X, 12 = Y, 13 = Z), geophone depth (50 m, 100 m, 150 m, 200 m), and then station azimuth in degrees. The plot shows the full range of station azimuths between ± 180° for each depth/component combination. The leftmost panel shows the stacked RSTFs. Because of the compressed horizontal scale, wiggle traces have not been shown and a colour scale which was found to accentuate the varying trace amplitudes has been chosen. The individual RSTFs show the same overall form and azimuth dependence, and the visible noise is reduced by the summation as expected.

Panels showing summed RSTFs (left-most panel) and RSTFs for the 12 individual geophones at each station location for event pair 17123/18002. The trace identifiers give the component number, geophone depth, and station azimuth. Each panel shows the range of station azimuths on the interval − 180° to + 180° with the groups of blank trace slots indicating the break between the data from neighbouring geophones. Wiggle traces are not shown; the colour scale indicates trace amplitude
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Oates, S., Schmitz, J., Zurek, B. et al. Empirical Green’s function analysis of some induced earthquake pairs from the Groningen gas field. J Seismol 28, 579–613 (2024). https://doi.org/10.1007/s10950-024-10204-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10950-024-10204-9