
Abstract
In this paper, the Spectral Difference approach using Raviart-Thomas elements (SDRT) is formulated for the first time on tetrahedral grids. To determine stable formulations, a Fourier analysis is conducted for different SDRT implementations, i.e. different interior flux points locations. This stability analysis demonstrates that using interior flux points located at the Shunn-Ham quadrature rule points leads to linearly stable SDRT schemes up to the third order. For higher orders of accuracy, a significant impact of the position of flux points located on faces is shown. The Fourier analysis is then extended to the coupled time-space discretization and stability limits are determined. Additionally, a comparison between the number of interior FP required for the SDRT scheme and the Flux Reconstruction method is proposed and shows that the two approaches always differ on the tetrahedron. Unsteady validation test cases include a convergence study using the Euler equations and the simulation of the Taylor-Green vortex.





Similar content being viewed by others

Availability of data and material.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Hesthaven, J.S., Teng, C.H.: Stable spectral methods on tetrahedral elements. SIAM J. Sci. Comput. 21(6), 2352–2380 (2000). https://doi.org/10.1137/S1064827598343723
Hesthaven, J., Warburton, T.: Nodal high-order methods on unstructured grids: I. time-domain solution of Maxwell’s equations. J. Comput. Phys. 181(1), 186–221 (2002). https://doi.org/10.1006/jcph.2002.7118
Bettess, P., Laghrouche, O., Perrey-Debain, E., Hesthaven, J.S., Warburton, T.: High-order nodal discontinuous Galerkin methods for the Maxwell eigenvalue problem, Philosophical Transactions of the Royal Society of London. Ser. A Math. Phys. Eng. Sci. 362(1816), 493–524 (2004). https://doi.org/10.1098/rsta.2003.1332
Hesthaven, J.S., Warburton, T.: Nodal Discontinuous Galerkin Methods. Springer, New York (2008). https://doi.org/10.1007/978-0-387-72067-8
Dosopoulos, S., Zhao, B., Lee, J.-F.: Non-conformal and parallel discontinuous galerkin time domain method for Maxwell’s equations: EM analysis of IC packages. J. Comput. Phys. 238, 48–70 (2013). https://doi.org/10.1016/j.jcp.2012.11.048
Chan, J., Wang, Z., Modave, A., Remacle, J., Warburton, T.: GPU-accelerated discontinuous Galerkin methods on hybrid meshes. J. Comput. Phys. 318, 142–168 (2016). https://doi.org/10.1016/j.jcp.2016.04.003
Huynh, H.T.: A Flux Reconstruction Approach to High-Order Schemes Including Discontinuous Galerkin Methods, In: 18th AIAA Computational Fluid Dynamics Conference, (2007). https://doi.org/10.2514/6.2007-4079
Vincent, P.E., Castonguay, P., Jameson, A.: A new class of high-order energy stable flux reconstruction schemes. J. Sci. Comput. 47(1), 50–72 (2011). https://doi.org/10.1007/s10915-010-9420-z
Williams, D.M., Jameson, A.: Energy stable flux reconstruction schemes for advection-diffusion problems on Tetrahedra. J. Sci. Comput. 59(3), 721–759 (2014). https://doi.org/10.1007/s10915-013-9780-2
Williams, D.M., Jameson, A.: Nodal points and the nonlinear stability of high-order methods for unsteady flow problems on tetrahedral meshes. In 21st AIAA Computational Fluid Dynamics Conference. American Institute of Aeronautics and Astronautics, June (2013)
Witherden, F.D., Park, J.S., Vincent, P.E.: An analysis of solution point coordinates for flux reconstruction schemes on tetrahedral elements. J. Sci. Comput. 69, 905–920 (2016). https://doi.org/10.1007/s10915-016-0204-y
Shunn, L., Ham, F.: Symmetric quadrature rules for tetrahedra based on a cubic close-packed lattice arrangement. J. Comput. Appl. Math. 236(17), 4348–4364 (2012). https://doi.org/10.1016/j.cam.2012.03.032
Bull, J.R., Jameson, A.: Simulation of the Taylor-Green vortex using high-order flux reconstruction schemes. AIAA J. 53(9), 2750–2761 (2015). https://doi.org/10.2514/1.J053766
Kopriva, D.A.: A Conservative Staggered-Grid Chebyshev multidomain method for compressible flows. ii. a semi-structured method. J. Comput. Phys. 128(2), 475–488 (1996). https://doi.org/10.1006/jcph.1996.0225
Liu, Y., Vinokur, M., Wang, Z.J.: Spectral difference method for unstructured grids i: basic formulation. J. Comput. Phys. 216(2), 780–801 (2006). https://doi.org/10.1016/j.jcp.2006.01.024
Van den Abeele, K., Lacor, C., Wang, Z.J.: On the stability and accuracy of the spectral difference method. J. Sci. Comput. 37(2), 162–188 (2008). https://doi.org/10.1007/s10915-008-9201-0
Balan, A., May, G., Schöberl, J.: A stable high-order Spectral Difference method for hyperbolic conservation laws on triangular elements. J. Comput. Phys. 231(5), 2359–2375 (2012). https://doi.org/10.1016/j.jcp.2011.11.041
May, G., Schöberl, J.: Analysis of a Spectral Difference Scheme with Flux Interpolation on Raviart-Thomas Elements, Tech. rep., Aachen Institute for Advanced Study in Computational Engineering Science (2010)
Li, M., Qiu, Z., Liang, C., Sprague, M., Xu, M., Garris, C.A.: A new high-order spectral difference method for simulating viscous flows on unstructured grids with mixed-element meshes. Comput. Fluids 184, 187–198 (2019). https://doi.org/10.1016/j.compfluid.2019.03.010
Qiu, Z., Zhang, B., Liang, C., Xu, M.: A high-order solver for simulating vortex-induced vibrations using sliding-mesh spectral difference method and hybrid grids. Int. J. Numer. Methods Fluids 90, 171–194 (2019). https://doi.org/10.1002/fld.4717
Veilleux, A., Puigt, G., Deniau, H., Daviller, G.: A stable Spectral Difference approach for computations with triangular and hybrid grids up to the \(6^{th}\) order of accuracy. J. Comput. Phys. 449, 110774 (2022). https://doi.org/10.1016/j.jcp.2021.110774
Balan, A., May, G., Schöberl, J.: A Stable and Spectral Difference and Method for Triangles, In: 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, (2011). https://doi.org/10.2514/6.2011-47
Proriol, J.: Sur une famille de polynômes à deux variables orthogonaux dans un triangle. Sci. Paris 257, 2459–2461 (1957)
Koornwinder, T.: Two-variable analogues of the classical orthogonal polynomials, In: R. Askey (Eds), Theory and Applications of Special Functions, San Diego, (1975)
Dubiner, M.: Spectral methods on triangles and other domains. J. Sci. Comput. 6(4), 345–390 (1991). https://doi.org/10.1007/BF01060030
Williams, D., Shunn, L., Jameson, A.: Symmetric quadrature rules for simplexes based on sphere close packed lattice arrangements. J. Comput. Appl. Math. 266, 18–38 (2014). https://doi.org/10.1016/j.cam.2014.01.007
Silvester, P.: Symmetric quadrature formulae for simplexes. Math. Comput. 24, 95–100 (1970). https://doi.org/10.1090/S0025-5718-1970-0258283-6
Vioreanu, B., Rokhlin, V.: Spectra of multiplication operators as a numerical tool. SIAM J. Sci. Comput. 36, 267–288 (2014). https://doi.org/10.1137/110860082
Keast, P.: Moderate degree tetrahedral quadrature formulas. Comput. Methods Appl. Mech. Eng. 55(3), 339–348 (1986). https://doi.org/10.1016/0045-7825(86)90059-9
Witherden, F., Vincent, P.: On the identification of symmetric quadrature rules for finite element methods. Comput. Math. Appl. 69, 1232–1241 (2015). https://doi.org/10.1016/j.camwa.2015.03.017
Jinyun, Y.: Symmetyric Gaussian quadrature formulae for tetrahedronal regions. Comp. Methods Appl. Mech. Eng. 43, 349–353 (1984). https://doi.org/10.1016/0045-7825(84)90072-0
Hammer, P., Marlowe, O., Stroud, A.: Numerical integration over simplexes and cones. Math. Tables Other Aids Comput. 10(55), 130–137 (1956). https://doi.org/10.1090/S0025-5718-1956-0086389-6
Liu, Y., Vinokur, M.: Exact integrations of polynomials and symmetric quadrature formulas over arbitrary polyhedral grids. J. Comput. Phys. 140, 122–147 (1998). https://doi.org/10.1006/jcph.1998.5884
Jaśkowiec, J., Sukumar, N.: High-order cubature rules for tetrahedra. Numer. Methods Eng. 121(11), 2418–2436 (2020). https://doi.org/10.1002/nme.6313
Xiao, H., Gimbutas, Z.: A numerical algorithm for the construction of efficient quadrature rules in two and higher dimensions. Comput. Math. Appl. 59(2), 663–676 (2010). https://doi.org/10.1016/j.camwa.2009.10.027
Bogey, C., Bailly, C.: A family of low dispersive and low dissipative explicit schemes for flow and noise computations. J. Comput. Phys. 194, 194–214 (2004). https://doi.org/10.1016/j.jcp.2003.09.003
Jiang, G.-S., Shu, C.-W.: Efficient implementation of weighted ENO schemes. J. Comput. Phys. 126(1), 202–228 (1996). https://doi.org/10.1006/jcph.1996.0130
Pazner, W., Persson, P.-O.: Approximate tensor-product preconditioners for very high order discontinuous Galerkin methods. J. Comput. Phys. 354, 344–369 (2018). https://doi.org/10.1016/j.jcp.2017.10.030
https://how5.cenaero.be/. [link]. URL https://how5.cenaero.be/
Sun, Y., Wang, Z.J., Liu, Y.: High-order multidomain spectral difference method for the Navier–Stokes equations on unstructured hexahedral grids. Commun. Comput. Phys. 2(2), 310–333 (2007)
Raviart, P., Thomas, J.: A mixed finite element method for 2nd order elliptic problem, In: Lecture Notes in Mathematics 606, p. 292–315 (1977)
Nedelec, J.: Mixed finite elements in R3. Numerische Mathematik 35, 315–341 (1980)
Acknowledgements
Dr. Guillaume Puigt is partially supported by LMA2S (Laboratoire de Mathématiques Appliquées à l’Aéronautique et au Spatial), the Applied Mathematics Lab of ONERA.
Funding
The authors did not receive support from any organization for the submitted work.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interests.
The authors have no conflicts of interest to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A. Definition of the Raviart-Thomas (RT) Space
The Raviart-Thomas (RT) finite element spaces were originally introduced by Raviart and Thomas [41] to approximate the Sobolev space \(\text {H(div)}\) defined by:
where d is the dimension, K is a bounded open subset of \({\mathbb {R}}^d\) with a Lipshitz continuous boundary, \(L^2 (K)\) is the Hilbert space of square-integrable function defined on K. The extension to the three-dimensional case considering K as a tetrahedron or a cube was proposed by Nedelec [42]. The space \(RT_p\) spanned by the Raviart-Thomas basis functions of degree p is the smallest polynomial space such that the divergence maps \(RT_p\) onto \({\mathbb {P}}_p\), the space of piecewise polynomials of degree \(\le p\). Considering the reference tetrahedron \({\mathcal {T}}_e\), the RT space of order p is defined in 3D by:
where \({\mathbb {P}}_p\) is the space of polynomials of degree at most p:
\(\bar{{\mathbb {P}}}_p\) is the space of polynomials of degree p:
and \(({\mathbb {P}}_p)^3 = ({\mathbb {P}}_p,{\mathbb {P}}_p,{\mathbb {P}}_p)^\top \) is the three dimensional vector space for which each component is a polynomial of degree at most p. The dimension of each space is \(\text {dim}\; {\mathbb {P}}_p = \frac{(p+1)(p+2)(p+3)}{6}\), \(\text {dim}\; {\mathbb {P}}_p^3 = \frac{(p+1)(p+2)(p+3)}{2}\), \(\text {dim}\; \bar{{\mathbb {P}}}_p = \frac{(p+1)(p+2)}{2}\) and thus \(\text {dim} \; RT_p = \frac{(p+1)(p+2)(p+4)}{2}\). We denote \(\varvec{\phi }_n, n \in [\![1, N_{FP} ]\!]\) the monomials which form a basis in the \(RT_p\) space where
Determination of \(\varvec{\phi }_n\) for \(RT_1\), \(N_{FP} = 15\)

Appendix B. Matrices Formulation for the Fourier Analysis
The matrices \({\mathbf {M}}^{0,0,0}\), \({\mathbf {M}}^{-1,0,0}\), \(\mathbf {M}^{+1,0,0}\), \({\mathbf {M}}^{0,-1,0}\), \({\mathbf {M}}^{0,+1,0}\), \({\mathbf {M}}^{0,0,-1}\) and \({\mathbf {M}}^{0,0,+1}\) involved in the SDRT spatial discretization for the Fourier analysis on tetrahedral elements (Eq. (28)) are detailed in this appendix. Those matrices are given as:
where \(O_{m, n}\) is the zero matrix of size \(m \times n\). The same goes for \({\mathbf {M}}^{-1,0,0}\), \({\mathbf {M}}^{+1,0,0}\), \(\mathbf {M}^{0,-1,0}\), \({\mathbf {M}}^{0,+1,0}\), \({\mathbf {M}}^{0,0,-1}\) and \({\mathbf {M}}^{0,0,+1}\), associated respectively to the velocity matrices \({\mathbf {C}}^{-1,0,0}\), \({\mathbf {C}}^{+1,0,0}\), \(\mathbf {C}^{0,-1,0}\), \({\mathbf {C}}^{0,+1,0}\), \({\mathbf {C}}^{0,0,-1}\) and \({\mathbf {C}}^{0,0,+1}\). The transfer matrix is given by Eq. (16):
and the differentiation matrix by Eq. (21):
The velocity matrices are given as:
where \({\mathbf {C}}^{L}\) is defined by:
The matrix \({\mathbf {C}}^{T_i, T_j}\) links the FP between the triangular faces of \(T_i\) and \(T_j\). Its expression will depend on the local connectivity, i.e. the number and the orientation of the two faces in their respective element. The face number gives the local FP numbering whereas the orientation (how the two faces are facing each other) gives the FP order. An example of its determination is provided below for two arbitrary tetrahedral elements.
Determination of the Matrix \(\mathbf {{C}^{T_i, T_j}}\) —Example for \(\mathbf {p=1}\) Let us consider two tetrahedron \(T_1\) and \(T_2\) defined by their four nodes:
Following the CGNS notations, their faces are defined by:
-
\(T_1\), Face 1: A, C, B, \(\bullet \) \(T_2\), Face 1: A, E, C,
-
\(T_1\), Face 2: A, B, D, \(\bullet \) \(T_2\), Face 2: A, C, D,
-
\(T_1\), Face 3: B, C, D, \(\bullet \) \(T_2\), Face 3: C, E, D,
-
\(T_1\), Face 4: C, A, D, \(\bullet \) \(T_2\), Face 4: E, A, D.
They are sharing a face corresponding to Face 4 in \(T_1\) and Face 2 in \(T_2\). In the case of \(p=1\), this indicates that the FP numbers on (\(T_1\), Face 4) are [10, 12] whereas the FP number (Face 2, \(T_2\)) are [4, 6]. Then, the orientation between the faces needs to be determined to know in which order the FP are facing each other. For two arbitrary faces A and B defined respectively by nodes \((A_1, A_2, A_3)\) and \((B_1,B_2,B_3)\), three cases are possible:
-
\(A_1 = B_3\), \(A_2 = B_2\), \(A_3 = B_1\),
-
\(A_1 = B_2\), \(A_2 = B_1\), \(A_3 = B_3\),
-
\(A_1 = B_1\), \(A_2 = B_3\), \(A_3 = B_2\).
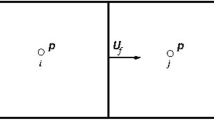
Our example is illustrated in Fig. 6 and corresponds to the second case.

Illustration of the orientation determination: \(T_1\) (on the left) and \(T_2\) (on the right)
In this example, the matrix \({\mathbf {C}}^{T_1, T_2}\) will take the following expression:
Rights and permissions
About this article

Cite this article
Veilleux, A., Puigt, G., Deniau, H. et al. Stable Spectral Difference Approach Using Raviart-Thomas Elements for 3D Computations on Tetrahedral Grids. J Sci Comput 91, 7 (2022). https://doi.org/10.1007/s10915-022-01790-2
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10915-022-01790-2