
Abstract
Kangaroos (Macropodoidea) display a diversity of locomotor modes, from bounding quadrupedally to hopping bipedally; but hopping has a body mass limit, which was exceeded by a number of extinct taxa. In the Pleistocene, a variety of “giant” kangaroos existed, both within the extinct subfamily Sthenurinae and the extant subfamily Macropodinae (both within the family Macropodidae). Sthenurines have been previously considered to have a type of locomotion (bipedal striding) different from extant kangaroos, but the primary locomotor mode of the large species of the extinct “giant” macropodine genus Protemnodon, closely related to extant large kangaroos, has undergone little question and has been assumed to be hopping. Here, the association between limb proportions and locomotor mode across Macropodoidea is assessed by examination of functional limb indices. We show that large (> 100 kg) Protemnodon species are unlike any other known macropodoids; their position in this functional morphospace, along with previously published evidence on humeral morphology, supports a prior hypothesis of a primarily quadrupedal mode of locomotion, likely some sort of bounding.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The conventional view of a kangaroo (superfamily Macropodoidea) is of a relatively large animal that locomotes via hopping (also referred to as bipedal saltation or ricochetal locomotion). Indeed, the “poster child” of kangaroos is the Red Kangaroo (Osphranter rufus) or the Eastern Grey Kangaroo (Macropus giganteus): however, members of Macropodoidea encompass a range of sizes and locomotor modes. Today, kangaroos (macropodoids or kangaroos in the broad sense) range from body masses of 500 g (Hypsiprymnodon moschatus, the Musky Rat-Kangaroo) to > 70 kg (O. rufus) (Kear et al. 2008). We consider an extinct “giant” kangaroo to be one of larger body mass than extant large kangaroos (i.e., > 100 kg).
With the exception of H. moschatus, all extant kangaroos use hopping as a fast gait. For slow gaits, kangaroos either employ a quadrupedal bound, or some, mostly larger species (in the genera Macropus, Onychogalea, Osphranter, and Wallabia), employ a “pentapedal walk” where the tail is used as a fifth limb in supporting the body (Dawson et al. 2015). Some species have abandoned hopping almost entirely to become primarily quadrupedal; for example, tree-kangaroos (Dendrolagus spp.) hop intermittently when on the ground but more frequently bound or use a four-footed walk, the latter gait being used most often along tree branches (Windsor and Dagg 1971). Secondary reliance on quadrupedal locomotion has arisen multiple times within Macropodoidea. Potoroids (rat-kangaroos; Potoroidae) use their forelimbs to dig for food, and so can be termed “semi-fossorial”, and some potoroids (species of Potorous and Bettongia) have been observed to climb (Seebeck and Rose 1989). Figure 1 shows a phylogeny of macropodoids including their mode of locomotion.

Simplified phylogeny of macropodoids, modified from Llamas et al. (2015), with the position of the Balbaridae from Den Boer et al. (2019), and the term Macropodia from Westerman et al. (2022). See text for explanations of locomotor categories. Dagger symbol (†) indicates an extinct taxon. Sources for silhouettes: Hypsiprymnodon moschatus, Bettongia lesueur, Setonix brachyurus and Trichosurus vulpecula from phylopic.org (Credits: Carly Monks [B. lesueur], T. Michael Keesey [others], S. brachyurus photo taken by Sean Mack; images available for reuse under the Attribution-ShareAlike 3.0 Unported license https://creativecommons.org/licenses/by-sa/3.0/). All other silhouettes created by BJ using Inkscape v. 1.3.2 (Smith 2020). Osphranter rufus was created from a composite of images in the public domain; Sthenurus stirlingi was modified from Regal in Janis et al. (2014), with permission from Brian Regal; Dendrolagus goodfellowi was created from a photo taken by BJ of an animal in the Bristol Zoological Gardens; Protemnodon anak was created from a photo taken by CMJ of the mounted specimen in the South Australian Museum. The genera grouped together here of Macropus, Osphranter and Notamacropus, previously all included within Macropus, are known as the “Macropus complex” (Celik et al. 2019); their interrelationships remain in debate. Figure created in Adobe Illustrator by Science Graphic Design (www.sciencegraphicdesign.com)
Today the most efficient kangaroos in terms of energy consumption are the largest species (i.e., greatest body masses) (Osphranter rufus, Macropus giganteus and M. fuliginosus); during hopping locomotion, their oxygen consumption at speeds over 3.9 m/s does not increase with speed, a stark difference to the linear increase in oxygen consumption with speed for similar sized quadrupedal mammals (Baudinette et al. 1992). Nevertheless, even the largest kangaroos, extant or extinct, are small in comparison with quadrupeds of similar ecology (i.e., ungulate placental mammals). Biomechanical modeling has thrown light on the size limits for hopping. Optimum body mass for hopping has been estimated to be ~50 kg, the average body mass for today’s largest kangaroos (Bennett and Taylor 1995). As kangaroos increase in body mass, they experience unusually high skeletal and tendon stresses (McGowan et al. 2008); this ultimately limits locomotor ability, with a body mass limit to hopping estimated at 160 kg (Snelling et al. 2017). In the Pleistocene, a variety of “giant” kangaroos existed that attained masses considerably above this limit, reaching up to 230 kg (Helgen et al. 2006) and calling into question their ability to hop.
Recent studies have found that the diversity of locomotor modes within Macropodoidea was likely far greater in the past than it is in the present day. The extinct sthenurines (Macropodidae: Sthenurinae) demonstrate anatomical evidence for a bipedal striding type of locomotion unlike any extant kangaroo (Janis et al. 2014), a notion supported by trackway data (Camens and Worthy 2019). Sthenurine forelimbs were likely not primarily weight-bearing at any gait (Wells and Tedford 1995; Janis et al. 2014, 2020; Jones et al. 2022), and their rigid lumbar region would also make spinal flexion for quadrupedal locomotion difficult (Wells and Tedford 1995). Wagstaffe et al. (2022) found that the resistance to bending stresses are different in the foot bones of similarly sized sthenurines and macropodines, supporting the hypothesis of different modes of locomotion in the two subfamilies.
Several extinct macropodid taxa are hypothesized to have been at least semi-arboreal if not fully so. These include species in the Balbaridae (Oligocene to Miocene stem macropodoids; Den Boer et al. 2019); Bohra, a Pleistocene stem dendrolagine much larger than extant dendrolagines (tree-kangaroos) (Warburton and Prideaux 2010); and a late-diverging Pleistocene macropodin, Congruus kitcheni, likely related to Protemnodon (see Fig. 1) that was around the size of an extant grey kangaroo (Warburton and Prideaux 2021).
Of particular interest here are species in the genus Protemnodon, a close relative of the Macropus group of taxa in the Macropus species complex (i.e., Macropus, Osphranter and Notamacropus) (Llamas et al. 2015). Although the genus originally was comprised of a miscellany of many different extinct and extant macropods, it is now limited to the smaller New Guinea species (Pr. otibandus, Pr. snewini at ~50 kg; Flannery 1994; plus the related Nombe nombe; Kerr and Prideaux 2022) and larger Australian species (Pr. roechus at ~160 kg; Pr. anak at ~131 kg; Pr. brehus at ~110 kg; Helgen et al. 2006) (see Kerr et al. 2024 for some additional species). Note that the species Pr. roechus and Pr. brehus have recently been determined to be nomina dubia (Kerr et al. 2024). The individuals of Pr. roechus and Pr. brehus described by Helgen et al. (2006) are included in the new species Pr. mamkurra (Kerr et al. 2024) and Pr. viator (Kerr et al. 2024), respectively. The individual of Pr. viator we consider here was originally classified as Pr. brehus; this is the same individual described in other publications (Janis et al. 2020, 2023; Jones et al. 2022;Wagstaffe et al. 2022; Janis et al. 2023).
The locomotor mode of Protemnodon has remained somewhat a mystery, though in recent years more evidence has begun to come to light (see also Kerr et al. 2024). The largest species of Protemnodon approached the body mass limit to hopping (160 kg). With extremely short feet and long, robust arms, their body plan appears unsuited to hopping; nevertheless, it has long been assumed that the larger species of Protemnodon were consistent hoppers like their Macropus relatives, although the smaller New Guinea species that have short tibiae have been considered as quadrupedal (Kear et al. 2008). It has been suggested that the anatomy of the large species of Protemnodon may also reflect more reliance on quadrupedal locomotion (Den Boer 2018). Janis et al. (2020) and Jones et al. (2022) found that the proximal and distal humeral morphology of Protemnodon indicates that a significantly greater proportion of the body weight was borne on the forelimbs than in extant hopping macropodids, supporting this hypothesis of committed quadrupedality.
Here we present a study of relative limb proportions within Macropodoidea. Relative limb proportions and limb indices have been widely employed as functional indicators of locomotor mode in extant and extinct mammals, although to date among large mammals only placentals have been considered (e.g., Van Valkenburgh 1987; Shockey et al. 2007; Croft and Anderson 2008; Samuels and Van Valkenburgh 2008; Meachen-Samuels and Van Valkenburgh 2009; Meachen-Samuels 2012; Samuels et al. 2013; Dunn 2018). The use of limb indices (i.e., proportions of one limb, or portion of a limb, relative to another) has relative pros and cons over the use of individual linear measurements (see discussion in Dunn 2018). Limb indices are considered to be a correlate of the mechanical advantage of the primary locomotor muscles (Samuels and Van Valkenburgh 2008). Limb indices also eliminate the effects of size but not allometry (Chen and Wilson 2015). One disadvantage is that the data should be collected from a single individual, at least for any given index, which may be difficult given the fragmentary nature of fossils (see discussion below). If an extinct macropodid employed a mode of locomotion divergent from extant taxa, the relative proportions of its limbs will likely reflect this. Thus, the divergent types of locomotion proposed above for sthenurines and large species of Protemnodon are expected to be apparent in their limb proportions.
This study will enable a better understanding of macropodoid biodiversity and ecomorphology, especially the locomotor diversity of Pleistocene forms. A potential locomotor mode for large species of Protemnodon is presented, given the evidence found here and in previous studies (Den Boer 2018; Janis et al. 2020; Jones et al. 2022).
Materials and methods
Materials
Linear measurements of macropodoid hindlimbs were taken from Janis et al. (2014), and forelimb measurements plus some additional hindlimb data were collected in 2019 by CMJ from the South Australian Museum. Data consisted of 89 individuals spanning 52 species (Online Resource 1: Tables S1, S2), encompassing the entire macropodoid locomotor and body mass range, comprising all known extant and most extinct genera. Each species was grouped into one of three locomotor modes from information from the literature: saltators (employ a significant amount of saltation or hopping); sthenurines (included as their own group, assumed to be bipedal striders following Janis et al. 2014: Procoptodon gilli at ~54 kg; Procoptodon goliah at ~232 kg; Simosthenurus occidentalis at ~118 kg; Sthenurus andersoni at ~72 kg; S. stirlingi at ~173 kg; S. tindalei at ~127 kg; body masses from Helgen et al. 2006); and quadrupedal, comprising habitual quadrupeds (engaging in little to no saltation but capable of this gait, including tree-kangaroos) and obligate quadrupeds (H. moschatus). Extinct Macropus species (M. titan) were assumed to be saltators, as with extant species of this genus. Protemnodon species (Pr. anak at ~131 kg; Pr. viator at ~110 kg; body masses from Helgen et al. 2006) were included as unknowns.
Methods
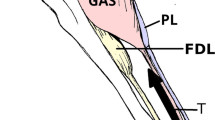
Sixteen linear measurements (Fig. 2) were combined into a set of thirteen osteological indices (Table 1). Some of the indices were adopted from previous studies (see in Table 1), whereas others are novel to this study. The number of indices that could be calculated for each individual for extinct taxa varied greatly according to the measurements available. All indices were calculated from single individuals, except for a couple of extinct taxa (Procoptodon gilli and Protemnodon anak; see Online Resource 1: Table S1). Although caution is warranted when using indices due to the inability to control the effects of the denominator on the numerator and an inability to control for allometric effects (Dunn 2018), previous studies using indices (see Introduction) have nevertheless produced strong ecomorphological interpretations. Variations in the denominator and numerator among species wer checked in this study to ensure values for each taxon were comparable.

Schematic diagram of the linear measurements obtained from the postcranial skeleton of 89 individual macropodoids spanning 52 extant and extinct species. Figure created in Adobe Illustrator by Science Graphic Design (www.sciencegraphicdesign.com)
The number of measurements varied among individuals, depending on availability of materials; only some individuals contained all of the measurements and could be included for all of the indices. Several additional measurements were taken in ImageJ to the nearest 0.01 mm (Schneider et al. 2012) using high-resolution photographs taken by CMJ. All measurements were taken three times and an average calculated to ensure maximum accuracy.
The thirteen indices were subjected to analyses to determine the degree to which each discriminated between the locomotor groups and the placement of the Protemnodon species relative to the defined groups. The performance of the seven best indices is shown in Fig. 3, but all were used in creating the principal component analysis (Fig. 4). All statistical tests were carried out in IBM SPSS Statistics v.26 (IBM Corp 2019). To test the indices for normality, Kolmogorov-Smirnov (for indices where sample size was more than 50; Smirnov 1939) and Shapiro-Wilks (for a sample size of less than 50; Shapiro and Wilk 1965) tests were carried out. ANOVA and Kruskal-Wallis tests (Fisher 1934; Kruskal and Wallis 1952) were then applied depending on the normality of the index to test whether there were significant differences between the locomotor groups. Due to increased risk of type I error when running multiple tests simultaneously, results were adjusted using the Bonferroni correction (Bonferroni 1935).

Clustered column plots of the osteological indices calculated in this study. The dotted lines are for reference only and do not have statistical significance; grey shading indicates potoroids (rat-kangaroos). a. Metatarsal-Femur Index (MFI), dotted line denotes the minimum value achieved by saltators; b. Intermembral Index (IM), dotted line denotes the maximum value achieved by saltators; c. Crural Index (CI), dotted line denotes the minimum value achieved by saltators; d. Olecranon Process Index (OPI), dotted line denotes the value above which only extant semi-fossorial taxa plot (i.e., those that dig for food); e. Humeral Robustness Index (HR), dotted line shows the distinction between more bipedal (high values) and more quadrupedal taxa. f. Ulna-Femur Index (UFI), dotted line mostly distinguishes taxa with long distal forelimbs (high values: tree-kangaroos, sthenurines and Protemnodon species); g. Brachial Index (BI), dotted line mostly distinguishes taxa with long proximal relative to distal forelimbs (high values: large saltators and Protemnodon species). The numbers along the bottom refer to individual taxa. The large saltating species (of the genera Macropus and Osphranter) are numbers 1–16, and the large sthenurine species (> 100 kg) are numbers 55, 57, 58, and 61–66. Locomotor type indicated by colors in the digital version. A full list of taxa (and referring numbers) and indices can be found in Online Resource 1: Table S2. Figure created in Adobe Illustrator by Science Graphic Design (www.sciencegraphicdesign.com)
The following analyses were undertaken in RStudio (RStudio Team 2015). To reduce dimensionality and visualize the data, allowing easy comparison of Protemnodon species to the groups of known locomotor mode, a principal component analysis (PCA) was undertaken using the PCA function in the package FactoMineR (Lê et al. 2008). The dataset was pruned to include only those taxa (22) for which all indices were available; for the PCA, only Protemnodon anak was comprised of four individuals, all from the Museum Victoria (Melbourne) collections and from the same locality (Morwell, Victoria). Fortunately, this data pruning did not impact the dataset range of body mass, locomotor mode and taxonomic diversity. A phylogenetic correction analysis (see Online Resource 2) showed little significant effects of phylogeny.
Museum abbreviations: AMNH, American Museum of Natural History, New York, USA; NHMUK, Natural History Museum, London, UK; NMS, National Museum of Scotland, Edinburgh, UK; NMV, Museum Victoria, Melbourne, Australia; SAMA, South Australian Museum, Adelaide, Australia; UMZC, University Museum of Zoology, Cambridge, UK.
Results
The indices varied in their ability to distinguish between the locomotor groups. The functional significance of each index is explained in Table 1. Some other indices (e.g., radial index, epicondyle index) showed very little differentiation among the groups and are not shown in Fig. 3 and Online Resource 1: Table S2; others showed clear distinctions. We present here the indices that show the clearest distinctions between taxa: other indices are shown and discussed in Jones 2020. Table 2 summarizes the results of the indices for the Protemnodon species, with comments on their functional significance.
Limb indices
Saltators and sthenurines have consistent values of Metatarsal-Femur Index (MFI, relative length of the metatarsal to the femur; Fig. 3a) above 40. The largest extant kangaroos achieve index values of around 60–76 (e.g., Osphranter rufus #12, MFI = 75.8), reflecting a metatarsal more than two-thirds the length of the femur, but the extinct giant kangaroo, Macropus titan #16, has a relatively low index (MFI = 58.86) in comparison with other extant large species. Quadrupedal macropodids show lower values, with the lowest values occurring in the tree-kangaroos (e.g., Dendrolagus matschei #73, MFI = 28.2). Protemnodon species (only the large ones Pr. anak and Pr. viator are included here) have values most comparable to the quadrupeds (Pr. anak #89, MFI = 36.38, but Pr. viator #90 has a slightly higher value, MFI = 44.73; see also Kerr et al. 2024). Quadrupedal taxa and Protemnodon species were significantly different (lower index) from both saltators and sthenurines (see Table S2). Patterns similar to MFI (higher values in saltators) occur in other indices (Proximal Phalanx Index, Intermediate Phalanx Index, Metatarsal Index and Metatarsal-Hindlimb Index) and are discussed in greater detail in Jones (2020).
Intermembral Index (IM, relative length of the forelimb to the hind limb; Fig. 3b) was consistently below 51 for saltators, reflecting hindlimbs over double the length of the forelimbs. Similar values were seen in the sthenurines and in the non-arboreal habitual quadrupedal macropodoids (potoroids, Setonix, Dorcopsis), although these taxa tended to have somewhat higher values than most of the saltators. Conversely, the obligate quadrupedal bounder (Hypsiprymnodon moschatus #85, IM = 57.85) and the tree-kangaroos showed much higher values (e.g., De. goodfellowi #69, IM = 69.90). The high values of the tree-kangaroos reflect adaptations to arboreality, with both relatively longer forelimbs and shorter hind limbs (Warburton and Prideaux 2021). The Protemnodon species have values most comparable to the obligate quadrupedal bounder H. moschatus (Pr. anak #89, IM = 59.05; Pr. viator #90, IM = 56.86, reflecting a slightly longer hind limb in Pr. viator; see Kerr et al. 2024).
Crural Index (CI, relative length of the tibia to the femur; Fig. 3c) shows values over 120 in the saltators and the sthenurines, indicating a relatively long tibia. The largest extant kangaroos have a tibia more than twice the length of their femur (e.g., Macropus fuliginosus #2, CI = 226.52), and have relatively longer tibiae than sthenurines (see Janis et al. 2023). Tree-kangaroos possess the lowest CI (e.g., De. dorianus #68, CI = 97.8); their femur and tibia show little to no differentiation in length. Low values occur across the quadrupedal group (e.g., H. moschatus #85, CI = 110.90; S. brachyurus #78, CI = 115.3), with the exception of the dorcopsids (e.g., Dorcopsis muelleri #98, CI = 141.70). Protemnodon species have relatively high values of CI (e.g., Pr. viator #90, CI = 168.23). Quadrupedal taxa were statistically different (lower index) from saltators, sthenurines and Protemnodon species (see Online Resource 1: Table S3). Olecranon Process Index (OPI, relative length of the olecranon process to the shaft of the ulna; Fig. 3d). Sthenurines have a notably low OPI (~ 10–13) and can be statistically distinguished from quadrupedal taxa and Protemnodon species (OPI ~ 18–21) (see Online Resource 1: Table S3). Most saltating macropodid taxa also have a low OPI (~ 10–17), but the semi-fossorial potoroids show much higher values (e.g., Aepyprymnus rufescens #49, OPI = 26.00; Bettongia lesueur #51, OPI = 20.44; Potorous longipes #83, OPI = 23.02). Interestingly, the OPI of the Protemnodon species is relatively high, in particular Pr. viator (#90, OPI = 21.18; see also Kerr et al. 2024), with values comparable to those of B. lesueur and Po. longipes.
Humeral Robustness Index (HRI, relative midshaft diameter of the humerus relative to its articular length; Fig. 3e) shows the highest values (HRI ~10–13) in tree-kangaroos (#69, HRI = 10.65 and #72, HRI = 11.21), and in both semi-fossorial (e.g., B. lesueur #51, HRI = 11.79) and quadrupedal (e.g., Do. luctuosa #78, HRI = 13.13) taxa. However, some saltators (Notamacropus eugeni #11, HRI = 11.0; Onychogalea fraenata #40, HRI = 12.88; Lagostrophus fasciatus #46, HRI = 13.19) also have high values; the reason for this is not clear, and most saltators have values less than 10.5. Protemnodon species also exhibit some of the highest HRI values (Pr. viator #90, HRI = 12.45); the difference between Pr. viator and Pr. anak (#86, HRI = 10.15 and #87 HRI = 10.47) is also noted by Kerr et al. (2024).
The Ulna-Femur Index (UFI, relative length of the ulna to the femur; Fig. 3f) reflects elongation of the distal forelimb. The highest UFI values (> 70) are seen in the tree-kangaroos, the sthenurines and especially in the Protemnodon species. High values are also seen in the large macropodids, and in Notamacropus dorsalis (#19, a male specimen, perhaps reflecting sexual dimorphism). The Protemnodon species are significantly different (higher) from the saltators (despite the high values of the large saltators), and the quadrupedal species (see Online Resource 1: Table S3).
The Brachial Index (BI, relative length of the ulna to the humerus; Fig. 3g) also reflects elongation of the distal forelimb but relative to the proximal forelimb rather than to the femur. The lowest values of BI (< 110) occur in the tree-kangaroos and the large sthenurine S. stirlingi (#63, BI = 112.65), reflecting a relatively long humerus and short forearm. In contrast high values (> 135), reflecting a longer forearm relative to the humerus, are seen in the large saltators, Protemnodon species (especially Pr. anak, #86, #87, BI = 145.8; see also Kerr et al. 2024) and, perhaps surprisingly, in the small (~50 kg; Helgen et al. 2006) sthenurine Procoptodon gilli (#56, BI = 171.13). Protemnodon species are statistically different from all other locomotor groups (higher index), and the sthenurines are statistically different from the saltators (lower index) (see Online Resource 1: Table S3).
Principal component analysis
The first three components of the PCA together explain 76.66% of the total variance. Figure 4 shows a plot of PC1 against PC2 (other PC axes were not significantly different with respect to the sorting of the taxa; see Online Resource 1: Table S4). The first component largely distinguishes the saltators and the sthenurines (positive scores) from the quadrupedal taxa and Protemnodon species (negative scores). This is because indices reflecting metatarsal length (e.g., Metatarsal-Femur Index, MFI) have high positive values on this axis, whereas indices reflecting forelimb length (e.g., Intramembral Index, IM) have high negative values (see Online Resource 1: Table S4). Some other indices (PPI, IPI, MHI), which were part of an earlier study (Jones 2020), also contribute to the hindlimb length along the first axis, but we consider these to be of secondary importance to the MFI and do not discuss them further here.

Principal component analysis (PCA) of the 13 osteological indices used in this study. Symbols (and colors in digital version) differentiate the locomotor groups. The variables factor map illustrates the loadings of the indices in the morphospace. See Online Resource 1: Table S1 for taxon information. Pr. anak is a composite specimen constructed from all Protemnodon anak individuals in the dataset. Pr. brehus = P. viator. All other values are from single individuals. Sources for silhouettes (from Phylopic.org): Hypsiprymnodon moschatus and Setonix brachyurus by T. Michael Keesey (S. brachyurus photo taken by Sean Mack), Bettongia lesueur by Carly Monks, Notamacropus eugenii by Geoff Shaw, Potorous tridactylus by Rachael T. Mason, Wallabia bicolor by Michael Scroggle; images available for reuse under the Attribution-ShareAlike 3.0 Unported license https://creativecommons.org/licenses/by-sa/3.0/). All other silhouettes created by BJ using Inkscape, 2020 (see caption for Fig. 1). Figure created in Adobe Illustrator by Science Graphic Design (www.sciencegraphicdesign.com)
The second component distinguishes Protemnodon species, the sthenurines, and the large specialized saltators (i.e., Macropus and Osphranter) (positive scores: high CI and UFI) from the quadrupeds and generalized forms (negative scores: lower CI) and semi-fossorial saltators (negative scores: high OPI). The sthenurines have similar scores to the large macropodines on PC2, but are separated from them on PC1 (lower scores), probably due to high UFIs. Although Protemnodon species possess a high UFI and relatively high CI, giving them high scores on PC2, their divergence from extant large macropodines along PC1 (lower scores) is related to their low Metatarsal Index (MFI) and high Intermembral Index (IM), plus relatively high Humeral Robustness Index (HRI).
Sexual dimorphism may be a confounding factor in comparative morphological measurements for the large extant macropodines (species of Macropus and Osphranter), especially for measurements relating to the forelimbs (see Richards et al. 2015). Note that the extremely high score of O. rufus on PC1 is in part due to sexual dimorphism: this individual (NHMUK 205, #14 in Fig. 3) is a large male with an extremely high UFI (in contrast, the M. giganteus, NMV C5532, with lower scores on PC1, is a female). The degree of sexual dimorphism in extinct large macropodids is not known, although in sthenurines, at least, males may have also had more robust forelimbs (Wells and Tedford 1995), and Kerr et al. (2024) allude to sexual dimorphism in Pr. viator. For the extant species, we only included measurements from species of known sex; intersex comparisons might yield different slightly different results, but we don’t consider that this affects the overall morphological patterns described here. For example, the separation of O. rufus (male) from M. giganteus (female) on axis 1 of the PCA (Fig. 4) may be due to dimorphism, but this does not affect their overall distinction from other macropodoids.
Discussion
The results show that osteological indices are a good reflection of primary gait among extant macropodoids. Large Protemnodon species possess an unusual suite of osteological traits both similar to and different from quadrupedal and saltating extant macropodoids, and also from the potentially bipedally striding sthenurines. On the other hand, the sthenurines are similar to the large hopping macropodines in their hindlimb proportions, but differ in their forelimb proportions, likely due to their highly specialized hands reflecting a habit of using the forelimbs to procure food (Tedford 1966).
Metatarsal length shows a strong relationship with primary locomotor mode, in particular when distinguishing between quadrupedal bounders and saltators (Kear et al. 2008). Metatarsal-Femur Index (MFI) is essentially a measure of stride length relative to the power of hindlimb extension (Polly 2020). Long metatarsals increase stride length (Hildebrand and Goslow 1982) and increase the lever arm for the action of the gastrocnemius tendon, allowing high speed, efficient hopping. More quadrupedal macropodines (e.g., Dorcopsis spp., Setonix) have relatively short metatarsals in comparison to specialized hoppers like species of Macropus and Osphranter, as do tree-kangaroos (Dendrolagus spp.). The short metatarsals of Protemnodon species, otherwise only seen in more quadrupedal extant kangaroos, must represent a secondary condition from that seen in the related Macropus complex extant macropodines, and are a strong indication they no longer relied on saltation as a dominant mode of locomotion. Figure 5 shows the feet of Protemnodon viator in comparison with a specialized hopper (M. giganteus) and a tree-kangaroo (D. inustus), showing not only the short metatarsals of Protemnodon, but also the highly divergent fifth digit, more divergent than in the tree-kangaroo with similarly short metatarsals (although tree-kangaroos have relatively longer and more robust fifth digits). Sthenurines show fairly elongated metatarsals, but they are not as extremely elongated as those of the large specialized saltators.

Cranial views of kangaroo feet, distal to the top of page, digits II and III not depicted since they are greatly reduced in all macropodids and absent from specimen of Protemnodon. a. Protemnodon viator, AMNM 145501; b. Macropus giganteus, NMV C5532; c. Dendrolagus inustus, UMCZ A12.72/1. Scale bars equal 5 cm. Figure created in Procreate by Science Graphic Design (www.sciencegraphicdesign.com)
Intermembral Index (IM) measures the relative length of the fore- and hindlimbs. Relative lengthening of the hindlimbs in saltators is particularly striking because the forelimbs do not show similar modifications (Hildebrand and Goslow 1982); thus, saltators have low values of IM (Finch and Freedman 1988). A higher IM reflects less differentiation in the length of the fore- and hindlimbs, a necessary adaption if consistently walking quadrupedally and especially necessary when living an arboreal lifestyle; therefore, quadrupedal and arboreal macropodoids have high values of IM. With IM values close to those of quadrupedal bounding species (Dendrolagus spp., H. moschatus), the IMs of the large Protemnodon species suggest they engaged in consistently more quadrupedal locomotion than extant large kangaroos. Relatively low values of IM in sthenurines are likely a result of the adoption of obligate bipedal locomotion, allowing the forelimbs to be specialized for food manipulation only (Janis et al. 2014, 2020).
Elongation of the distal limb is associated with adaptations for locomotor efficiency (Janis and Wilhelm 1993). Relative lengthening of the tibia (high Crural Index = CI) is part of the suit of morphological adaptations allowing efficient saltation in macropodoids (Hildebrand and Goslow 1982; Dawson et al. 2015), although it is a primarily a feature of the large macropodines (> 35 kg) where tibia length scales with positive allometry (Janis et al. 2023). Increasing the length of the tibia relative to the femur allows for a longer effective stride length with little increase in the cost of limb recycling (the metabolic cost of returning the limb after it has left the ground back for reuse in the next stride) (Dawson and Webster 2010), and allows for long gastrocnemius tendons (Achilles tendons, inserting onto the calcaneal heel; see Snelling et al. 2017) for storage of elastic energy. Note that, while both large Protemnodon species and sthenurines had long tibiae (sthenurines show a CI almost equivalent to the large hopping macropodines), these tibiae were still somewhat shorter than in the large extant macropodines (Janis et al. 2023). Although large Protemnodon species were likely too big and robust to be built for speed, retention of the long tibia from their macropodine ancestors indicates they may have benefited from the increased efficiency a longer distal hind limb provides with respect to maintaining an increased stride length (see discussion in Janis et al. 2023). A long tibia might also have been important for retaining a sufficiently long Achilles tendon for energy storage for hopping locomotion, even if this was not the primary locomotor mode.
Nevertheless, the long tibiae of large species of Protemnodon remain somewhat puzzling, especially as the smaller New Guinea species had short tibiae (Kear et al. 2008), although the similarly sized Pliocene Australian species Pr. snewini did not (Bartholomai 1978). Extreme elongation of the tibia in large macropodines precludes their ability to employ a quadrupedal bound, necessitating adoption of the pentapedal walk at slow speeds (Dawson et al. 2015). Pentapedal locomotion is an extremely inefficient gait, more so than quadrupedal bounding (Bennett 2000). Positive correlation between body mass and time spent active for herbivores (Belovsky and Slade 1986) indicates a large animal such as Protemnodon would favor an efficient slow gait for foraging, but the large extant macropodines are restricted to using the inefficient pentapedal gait for this behaviour. The intermembral index of large Protemnodon species is consistently greater than that of the pentapedal extant macropodines, indicating that they could have used a more efficient form of slow locomotion. Perhaps the necessity for a long tibia for occasional hopping explains the very short metatarsals in large Protemnodon species, as the only means of reducing the overall length of the hind leg to allow for quadrupedal (rather than pentapedal) walking or bounding. Thus, a combination of long forelimbs and short feet may have allowed Protemnodon species to circumvent the constraint that a high CI poses to extant macropodines, necessitating pentapedal walking (Dawson et al. 2015).
Nonetheless, it appears Protemnodon species were not entirely prioritising locomotor efficiency. The Olecranon Process Index (OPI) of Protemnodon species, in particular Pr. viator, is remarkably similar to that of semi-fossorial potoroids. A longer olecranon process (high OPI) produces a greater mechanical advantage of the triceps brachii muscle (Dunn 2018), allowing the production of higher output forces from the forelimbs, a necessity for digging into the substrate. A shorter olecranon process allows full extension of the elbow, increasing forelimb length and stride length (Rodman 1979). Wells and Tedford (1995) note that the short olecranon processes of sthenurines (reflected here in their low OPI) would allow for arm extension during feeding. Large Protemnodon species appear to have been prioritizing forelimb power over stride length, and this may be indicative that they engaged in digging (as proposed by Moore 2008). Furthermore, the robustness of a bone relates to its ability to resist the bending forces associated with either supporting the body weight, or to developing forces for specific limb functions, e.g., digging (Elissamburu and de Santis 2011). Digging behaviour is also reflected in the high Humeral Robustness Index (HRI) of large Protemnodon species, though this may be associated with increased quadrupedalism alone. It is interesting that the distal humeral morphology of large Protemnodon species is similar to that of the common wombat (Vombatus ursinus) (Jones et al. 2022). Figueirido et al. (2016) note the greater degree of forelimb stabilization in the wombat may relate to its semi-fossorial nature. Restriction of the forelimb to parasagittal movement is advantageous for digging as it prevents dislocation of the joint under pressure (Moore 2008).
It is therefore possible that the combination of features of a high degree of forelimb stabilization, large olecranon process and robust forelimbs of Protemnodon evince adaptations for digging. The short feet, with a divergent fifth digit (Fig. 5) and hooked phalanges (see below), would also have provided a stable base for this activity. Moore (2008) noted additional morphological similarities between Protemnodon species and the burrower Bettongia lesueur (the boodie), and her discriminant function analysis of macropodoid forelimb anatomy found Pr. anak to plot between forage digging and shelter digging macropodoids. However, with no extant analogues it is difficult to distinguish between digging adaptations and simply the necessary adaptations for a large macropodid to bear weight consistently on its forelimbs. In contrast, sthenurines have some of the lowest OPIs of all macropodoids (see Fig. 3). A small olecranon process limits the ability of the arm to support the anterior body weight on the hands and use the arms for propulsion along the ground (Wells and Tedford 1995), supporting the notion that the sthenurines did not employ their forelimbs during locomotion.
Here, and in the following section, we present some novel observations on Protemnodon anatomy that also relate to its locomotion. One interesting feature of Protemnodon species (seen in both large and smaller species; Kerr et al. 2024) is the strange nature of the intermediate pedal phalanges and the posture of the phalanges. The intermediate pedal phalanx is extremely short and broad, with a “puffy” appearance, very unlike any other macropodoid (see Fig. 6). The resistance to bending stresses in the intermediate phalanx of Protemnodon viator (as determined by Second Moment of Area Analysis simulations) is different to other large macropodines, showing very little difference in resistance along the length of the bone; in contrast, other macropodines have a definite trough between proximal and distal peaks (Pr. brehus in Wagstaffe et al. 2022). A study of resistance to bending in small macropodids showed a similar resistance pattern in the tree-kangaroo Dendrolagus inustus, but not in any non-arboreal taxon (Jones 2020).

Intermediate pedal phalanges of the fourth digit of macropodids, derived from CT scans, in cranial view (left) and lateral view (right), proximal to the top. a. Protemnodon viator, AMNM 145501; b. Macropus giganteus, AMNH 2390; c. Sthenurus stirlingi, AMNH 117494 A; d. Dorcopsis hageni, NMS unnumbered; e. Dendrolagus inustus, UMZC A12.72/1. Scale bars equal 1 cm. Figure created in Adobe Illustrator by Science Graphic Design (www.sciencegraphicdesign.com)
The phalanges of at least the large Protemnodon species (we have not examined the smaller ones) have a strange articulation (as observed by CMJ in at least a dozen different specimens; see also Wagstaffe 2018). If placed flat on a surface, they cannot be placed in articulation, unlike the condition in other kangaroos. Rather, the natural articulation appears for there to be a “hooking” between the intermediate and ungual phalanges (see Fig. 7). This articulation is also reflected in the distal articulation surface, which has limited dorsal extension, suggesting limited dorsiflexion between intermediate and distal phalanges (as shown in Fig. 7). (Interestingly, the distal articulation in Dorcopsis is similar; here the intermediate phalanx is relatively longer, but also with a rather “puffy” appearance, and in at least one specimen examined [SAMA M12259] the articulation is also “hooked”). The function of this phalangeal “hooking” is not clear, but it likely allowed for a degree of gripping with the feet, enhanced by the long, curved ungual phalanges.

Lateral views of kangaroo phalanges of the fourth pedal digit in natural articulation. a. Protemnodon viator, AMNM 145501; b. Protemnodon anak, NMV P38132 (the inset shows the bones placed flat against the ground, in contrast to the kangaroos figured in b-e, where the natural articulation allows the bones to be placed flat on the ground); c. Sthenurus stirlingi, NMV P150282.2-4; d. Macropus giganteus, NMV C5532; e. Dendrolagus inustus, UMZC A12.72/1. Scale bars equal 2 cm. Figure created in Procreate by Science Graphic Design (www.sciencegraphicdesign.com)
The possible locomotor mode of Protemnodon
While the superficial anatomy of large Protemnodon species is clearly that of a large extant kangaroo, their detailed anatomy makes them puzzling animals. This study has determined that the postcranial anatomy of these Protemnodon species is strongly divergent from that of large extant macropodines: large species of Protemnodon likely could not have employed sustained hopping locomotion like large extant kangaroos, although trackway data do indicate that they hopped at least occasionally (Belperio and Fotheringhamm 1990; Carey et al. 2011). Kerr et al. (2024) consider that they were adapted for “low- to mid-gear hopping” through dense vegetation, although it is difficult to know what this would mean in terms of biomechanics for a large kangaroo, well above the optimum body mass for hopping. Aspects of their forelimb anatomy indicate a much greater degree of weight-bearing on the forelimbs than large extant kangaroos, including the morphology of the proximal (Janis et al. 2020) and distal humerus (Jones et al. 2022). Large Protemnodon species plot in a vacant area of macropodoid morphospace (Fig. 4), indicating that there are no extant analogues. Much can be inferred about the locomotor mode of large Protemnodon species from the robust morphological observations presented here although, as for any extinct taxon, a definitive conclusion is impossible.
Multiple lines of evidence indicate large Protemnodon species may have been predominantly quadrupedal. Den Boer (2018) noted the general curvature of their ungual phalanges (see Fig. 7a, b): making comparisons to extant tree-kangaroos; she concluded this morphology may have provided grip and aided in maintaining balance on irregular substrates. The “hooking” of the pedal phalanges (Fig. 7a, b) would also help with this. Given the size of large Protemnodon species, and the forearm motion relatively restricted to the parasagittal plane (Janis et al. 2020; Jones et al. 2022), it is not suggested that they were engaging in arboreal activities (for which they would surely have been too large), but rather an enhancement of locomotion within a closed habitat. Isotopic values in the teeth of a species of Protemnodon at the Cuddie Springs site indicate a closed habitat ecology (DeSantis et al. 2017), and quadrupedal locomotion enables easier directional changes when navigating obstacles in dense forest habitats (Windsor and Dagg 1971). If large Protemnodon species inhabited woodland or forest, given their size adoption of quadrupedal locomotion may have been necessary to enable navigation of the dense forest floor, using their short, wide feet with divergent fifth digits and hooked toes to gain purchase on the irregular ground. As previously noted, the forearm morphology of large Protemnodon species is consistent with digging, and the short, broad feet may have aided in gaining purchase during such activities (see Hildebrand and Goslow 1982). The relatively long neck, seen in at least in Pr. anak (see Kerr et al. 2024) is also unlike that seen in other kangaroos or any other hopping mammal, and is counter indicative of hopping (see Hildebrand and Goslow 1982).
A major question remains: were large Protemnodon species bounding using their hind legs synchronously (as in bounding kangaroos and other small bounding mammals) or asynchronously (i.e., some kind of galloping gait, using the hind limbs independently)? Asynchronous use of all four limbs is only seen today among kangaroos in the genus Dendrolagus (Windsor and Dagg 1971). The sacrum of Protemnodon is unusually large and broad (see Fig. 8). Janis et al. (2014) interpreted the large, broad sacrum of sthenurines as indicative of walking with alternate limbs, resisting rotational torsion at the sacroiliac joint. Although Protemnodon species never have more than two sacral vertebrae (as in other macropodids), while sthenurines sometimes have three (as shown here), the sacrum is proportionally much broader and more massive in general even than in sthenurines (see Fig. 8). Therefore, the large sacrum of Protemnodon could also be suggestive of the need to brace against the rotational forces associated with using the hindlimbs independently, perhaps indicating some sort of galloping quadrupedal gait (in contrast to bounding, which uses the hind limbs in synchrony). It would be interesting to investivage whether tree-kangaroos have relatively broader sacra than other kangaroos, given their use of asynchronous gaits, but this is beyond the realm of this study.

Dorsal views of kangaroo sacra, cranial/anterior to top. a. Protemnodon sp. (= P. “brehus”), SAMA unnumbered, Salt Creek, Normanville (Pleistocene); b. Macropus cf. M. giganteus, SAMA P17495, Green Waterhole (Pleistocene); c. Simosthenurus occidentalis, SAMA P18308, Green Waterhole (Pleistocene). These sacra come from animals of similar body size (femoral length). Scale bar equals 5 cm. Figure created in Procreate by Science Graphic Design (www.sciencegraphicdesign.com)
Jones et al. (2022) presented a restoration of Protemnodon anak based on the common way in which the genus is portrayed (a bipedal standing position, from the mounted skeleton of Pr. anak in the South Australian Museum, as shown in the silhouettes in Figs. 1 and 4). Using new knowledge gained from this study an alternate quadrupedal restoration of Protemnodon anak is here proposed (Fig. 9). While the hypothesis that large species of Protemnodon may have had a quadrupedal, ‘semi-fossorial’ lifestyle is necessarily based on informed speculation, it is nonetheless grounded in the new understanding of its unique postcranial anatomy gained through this study.

Proposed new restoration of Protemnodon anak based on the anatomical evidence presented in this study. Average adult female human for size comparison (1.66 m). Also shown for comparison is Osphranter rufus, the largest species of kangaroo today. Drawings by Billie Jones. Figure created in Adobe Illustrator by Science Graphic Design (www.sciencegraphicdesign.com)
Conclusion
The relative proportions of a macropodoid’s limbs can be shown to be functionally relevant in determining its locomotor mode. Macropodoid limb proportions differ significantly between the species specializing in the two different dominant modes of locomotion in extant macropodoids: i.e., predominantly quadrupedal or predominantly saltatory. The morphology of the extinct sthenurines and large species of the extinct macropodine Protemnodon show them to be clearly distinguishable from extant species practicing these two dominant modes of locomotion.
The results presented support prior hypotheses that macropodoid locomotion was more diverse in the past and strengthen previous hypotheses that sthenurines employed bipedal striding and that large species of Protemnodon were predominantly quadrupedal. A primarily quadrupedal, closed habitat lifestyle is suggested for large species of Protemnodon in which they may have used their feet to grip the substrate, although they likely also engaged in some hopping. Additionally, several lines of evidence suggest these Protemnodon species may have engaged in digging behaviour.
Data availability
All of the data are presented within the manuscript or the supplementary information files.
References
Bartholomai A (1978) The Macropodidae (Marsupialia) from the Allingham Formation, northern Queensland; results of the Ray E Lemley expedition, Part 2. Mem Queensl Mus 18:127–143
Baudinette R, Snyder GK, Frappell PB (1992) Energetic cost of locomotion in the tammar wallaby. Am J Physiol 262:R771–R778 https://doi.org/10.1152/ajpregu.1992.262.5.R771
Belovsky GE, Slade J (1986) Time budgets of grassland herbivores: body size similarities. Oecologia 70:53–62 https://doi.org/10.1007/BF00377110
Belperio AP, Fotheringham DG (1990) Geological setting of two quaternary footprint sites, western South Australia. Aust J Earth Sci 37:37–42 https://doi.org/10.1080/08120099008727903
Bennett M (2000) Unifying principles in terrestrial locomotion: do hopping Australian marsupials fit in? Physiol Biochem Zool 73:726–735 https://doi.org/10.1086/318110
Bennett MB, Taylor CR (1995) Scaling of elastic strain energy in kangaroos and the benefits of being big. Nature 378:56–59
Bonferroni CE (1935) Il calcolo delle assicurazioni su gruppi di teste. In: Carboni SO (ed) Onore del Professore Salvatore Ortu Carboni. Bardi, Rome, pp 13–60
Camens AB, Worthy TH (2019) Walk like a kangaroo: new fossil trackways reveal a bipedally striding macropodid in the Pliocene of Central Australia. J Vertebr Paleontol SVP Program Abstr Book 2019:72
Carey SP, Camens AB, Cupper ML, Grun R, Hellstrom JC, McKnight SW, McLennan I, Pickering DA, Trusler M, Aubert M (2011) A diverse Pleistocene marsupial trackway assemblage from the Victorian Volcanic Plains. Aust Quat Sci Rev 30:591–610 https://doi.org/10.1016/j.quascirev.2010.11.021
Celik M, Cascini M, Haouchar D, van der Burg C, Dodt W, Evans AR, Prentis P, Bunce M, Fruciano C, Phillips MJ (2019). A molecular and morphometric assessment of the systematics of the Macropus complex clarifies the tempo and mode of kangaroo evolution. Zool J Linn Soc 186:793–812.
Chen M, Wilson GP (2015) A multivariate approach to infer locomotor modes in Mesozoic mammals. Paleobiology 4:280–312 https://doi.org/10.1017/pab.2014.14
Croft DA, Anderson LC (2008) Locomotion in the extinct notoungulate Protypotherium. Palaeontol Electron 11(1):1A
Dawson RS (2015) Morphological correlates of pentapedal locomotion in kangaroos and wallabies (Family: Macropodidae). Dissertation, The University of Western Australia, Perth
Dawson RS, Warburton NM, Richards HL, Milne N (2015) Walking on five legs: investigating tail use during slow gait in kangaroos and wallabies. Aust J Zool 63:192–200 https://doi.org/10.1071/ZO15007
Dawson TJ, Webster K (2010) Energetic characteristics of macropodoid locomotion. In: Coulson G, Eldridge MDB (eds) Macropods: The Biology of Kangaroos, Wallabies, and Rat–kangaroos. CSIRO Publishing, Collingwood, Australia, pp 99–108
Den Boer W (2018) Evolutionary progression of the iconic Australasian kangaroos, rat-kangaroos, and their fossil relatives (Marsupiala: Macropodiformes). Dissertation, Uppsala University
Den Boer W, Campione NE, Kear BP (2019) Climbing adaptations, locomotory disparity and ecological convergence in ancient stem ‘kangaroos’. R Soc Open Sci 6:181617 https://doi.org/10.1098/rsos.181617
DeSantis LRG, Field JH, Wroe S, Dodson JR (2017) Dietary responses of Sahul (Pleistocene Australia-New Guinea) megafauna to climate and environmental change. Paleobiology 43:181–185 https://doi.org/10.1017/pab.2016.50
Dunn RH (2018) Functional morphology of the postcranial skeleton. In: Croft DA, Su DF, Simpson SW (eds) Methods in Paleoecology: Reconstructing Cenozoic Terrestrial Environments and Ecological Communities. Springer International Publishing, Cham, pp 23–36
Echeverría AI, Becerra F, Vassallo AI (2014) Postnatal ontogeny of limb proportions and functional indices in the subterranean rodent Ctenomys talarum (Rodentia: Ctenomyidae). J Morphol 275:902–913 https://doi.org/10.1002/jmor.20267
Elissamburu A, de Santis L (2011) Forelimb proportions and fossorial adaptations in the scratch–digging rodent Ctenomys (Caviomorpha). J Mammal 92:683–689 https://doi.org/10.1644/09-MAMM-A-113.1
Figueirido B, Martín-Serra A, Janis CM (2016) Ecomorphological determinations in the absence of living analogues: the predatory behavior of the marsupial lion (Thylacoleo carnifex) as revealed by elbow joint morphology. Paleobiology 42:508–531 https://doi.org/10.1017/pab.2015.55
Finch M, Freedman L (1988) Functional-morphology of the limbs of Thylacoleo carnifex Owen (Thylacoleonidae, Marsupialia). Aust J Zool 36:251–272 https://doi.org/10.1071/ZO9880251
Fisher RA (1934) Statistical methods for research workers. In: Kots S, Johnson NL (eds) Breakthroughs in Statistics. Springer, New York, pp 66–70
Flannery TF (1994) The fossil land mammal record of New Guinea: a review. Sci N Guin 20:39–48
Garland T Jr, Janis CM (1993) Does metatarsal/femur ratio predict maximal running speed in cursorial mammals? J Zool 229:133–151 https://doi.org/10.1111/j.1469-7998.1993.tb02626.x
Granatosky MC (2018) A review of locomotor diversity in mammals with analyses exploring the influence of substrate use, body mass and intermembral index in primates. J Zool 306:207–216 https://doi.org/10.1111/jzo.12608
Helgen KM, Wells RT, Kear BP, Gerdtz WR, Flannery TF (2006) Ecological and evolutionary significance of sizes of giant extinct kangaroos. Aust J Zool 54:293–303 https://doi.org/10.1071/ZO05077
Hildebrand M, Goslow G (1982) Analysis of Vertebrate Structure. Wiley, NJ
IBM Corp (2019) IBM SPSS Statistics for Macintosh, Version 260. Armonk, NY
Janis CM, Wilhelm PB (1993) Were there mammalian pursuit predators in the Tertiary? Dances with wolf avatars. J Mamm Evol 1:103–125 https://doi.org/10.1007/BF01041590
Janis CM, Buttrill K, Figueirido B (2014) Locomotion in extinct giant kangaroos: were sthenurines hop-less monsters? PLoS ONE 9:e109888 https://doi.org/10.1371/journal.pone.0109888
Janis CM, Napoli JG, Billingham C, Martín-Serra A (2020) Proximal humerus morphology indicates divergent patterns of locomotion in extinct giant kangaroos. J Mamm Evol 27:627–647 https://doi.org/10.1007/s10914-019-09494-5
Janis CM, O’Driscoll AM, Kear BP (2023) Myth of the QANTAS leap: perspectives on the evolution of kangaroo locomotion. Alcheringa 47:671–685 https://doi.org/10.1080/03115518.2023.2195895
Jones B (2020) Locomotor divergence in Macropodoidea: Protemnodon was not a giant hopping kangaroo. MS thesis, University of Bristol, Bristol
Jones B, Martín-Serra A, Rayfield EJ, Janis CM (2022) Distal humeral morphology indicates locomotory divergence in extinct giant kangaroos. J Mammal Evol 29:27–41 https://doi.org/10.1007/s10914-021-09576-3
Kear BP, Lee MSY, Gerdtz WR, Flannery TF (2008) Evolution of hind limb proportions in kangaroos (Marsupalia: Macropodoidea). In: Sargis EF, Dagosto M (eds) Mammalian Evolutionary Morphology: A Tribute to Frederick S. Szalay. Springer, New York, pp 25–55
Kerr IA, Prideaux GJ (2022) A new genus of kangaroo (Marsupialia, Macropodidae) from the late Pleistocene of Papua New Guinea. Trans R Soc S Aust 146:295–318 https://doi.org/10.1080/03721426.2022.2086518
Kerr IAR, Camens AB, van Zoelen JD, Worthy TH, Prideaux GJ (2024) Systematics and paleobiology of kangaroos of the late Cenozoic genus Protemnodon (Marsupialia, Macropodidae). Megataxa 11:1–261. https://doi.org/10.11646/megataxa.11.1.1
Kruskal WH, Wallis WA (1952) Use of ranks in one–criterion variance analysis. J Am Stat Assoc 47:583–621 https://doi.org/10.1080/01621459.1952.10483441
Lê S, Josse J, Husson F (2008) FactoMineR: an R package for multivariate analysis. J Stat Softw 25:1–18 https://doi.org/10.18637/jss.v025.i01
Llamas B, Brotherton P, Mitchell KJ, Templeton JEL, Thomson VA, Metcalf JL, Armstrong KN, Kasper M, Richards SM, Camens AB, Lee MSY, Cooper A (2015) Late Pleistocene Australian marsupial DNA clarifies the affinities of extinct megafaunal kangaroos and wallabies. Mol Biol Evol 32:574–584 https://doi.org/10.1093/molbev/msu338
McGowan CP, Skinner J, Biewener AA (2008) Hind limb scaling of kangaroos and wallabies (superfamily Macropodoidea): implications for hopping performance, safety factor, and elastic scaling. J Anat 212:153–163 https://doi.org/10.1111/j.1469-7580.2007.00841.x
Meachen-Samuels J, Van Valkenburgh B (2009) Forelimb indicators of prey-size preference in the Felidae. J Morphol 270:729–744 https://doi.org/10.1002/jmor.10712
Meachen–Samuels J (2012) Morphological convergence of the prey–killing arsenal of sabretooth predators. Paleobiology 38:1–14 https://doi.org/10.1666/10036.1
Moore L (2008) Functional morphology and palaeoecology of extinct macropodoids, sthenurines and Protemnodon spp (Marsupialia; Diprotodontia) BSc thesis, Flinders University, South Australia
Polly PD (2020) Ecometrics and Neogene faunal turnover: the roles of cats and hindlimb morphology in the assembly of carnivoran communities in the New World. Geodiversitas 42:257–304 https://doi.org/10.5252/geodiversitas2020v42a17
Richards H, Grueter C, Milne N (2015) Strong arm tactics: sexual dimorphism in macropodid limb proportions. J Zool 297:123–131 https://doi.org/10.1111/jzo.12264
Rodman PS (1979) Skeletal differentiation of Macaca fascicularis and Macaca nemestrina in relation to arboreal and terrestrial quadrupedalism. Am J Phys Anthropol 51:51–62 https://doi.org/10.1002/ajpa.1330510107
RSTUDIO Team (2015) RStudio: Integrated Development for R RStudio, Inc. Boston, MA. Available on: http://www.rstudio.com/
Samuels JX, Van Valkenburgh B (2008) Skeletal indicators of locomotor adaptations in living and extinct rodents. J Morphol 269:1387–1411 https://doi.org/10.1002/jmor.10662
Samuels JX, Meachen JA, Sakai SA (2013) Postcranial morphology and the locomotor habits of living and extinct carnivorans. J Morphol 274:121–146 https://doi.org/10.1002/jmor.20077
Schneider CA, Rasband WS, Eliceiri KW (2012) NIH Image to ImageJ: 25 years of image analysis. Nat Methods 9:671–675 https://doi.org/10.1038/nmeth.2089
Seebeck JH, Rose RW (1989) Potoroidae. In: Walton DW, Richardson, BJ (eds) Fauna of Australia: Mammalia. Surrey Beatty, Sydney, pp 716–739
Shapiro SS, Wilk MB (1965) An analysis of variance test for normality (complete samples). Biometrika 52:591–611 https://doi.org/10.2307/2333709
Shockey BJ, Croft DA, Anaya F (2007) Analysis of function in the absence of extant functional homologues: a case study using mesotheriid notoungulates (Mammalia). Paleobiology 33:227–247 https://doi.org/10.1666/05052.1
Smirnov NV (1939) Estimate of deviation between empirical distribution functions in two independent samples. Bull Mosc Univ 2:3–16
Snelling EP, Biewener AA, Hu Q, Taggart DA, Fuller A, Mitchell D, Maloney SK, Seymour RS (2017) Scaling of the ankle extensor muscle-tendon units and the biomechanical implications for bipedal hopping locomotion in the post-pouch kangaroo Macropus fuliginousus. J Anat 231:921–930 https://doi.org/10.1111/joa.12715
Tedford RH (1966) A review of the macropodid genus Sthenurus. Univ Calif Publ Geol Sci 64:1–165
Van Valkenburgh B (1987) Skeletal indicators of locomotor behavior in living and extinct carnivores. J Vertebr Paleontol 7:162–182 https://doi.org/10.1080/02724634.1987.10011651
Wagstaffe AY (2018) The biomechanics of kangaroo feet: hopping for a better resolution. MS thesis, University of Bristol, UK
Wagstaffe AY, Kunz C, O’Driscoll AM, Janis CM, Rayfield EJ (2022) Divergent locomotion in “giant” kangaroos: Evidence from foot bone bending resistance and microanatomy. J Morphol 283:313–332 https://doi.org/10.1002/jmor.21445
Warburton NM, Prideaux GJ (2010) Functional pedal morphology of the extinct tree-kangaroo Bohra (Diprotodontia: Macropodidae). In: Coulson G, Eldridge MDB (eds) Macropods: The Biology of Kangaroos, Wallabies, and Rat–kangaroos. CSIRO Publishing, Collingwood, Australia, pp 137–151
Warburton NM, Prideaux GJ (2021) The skeleton of Congruus kitcheneri, a semiarboreal kangaroo from the Pleistocene of southern Australia. R Soc Open Sci 8:202216. https://doi.org/10.1098/rsos.202216
Wells RT, Tedford RH (1995) Sthenurus (Macropodidae, Marsupialia) from the Pleistocene of Lake Callabonna, South Australia. Bull Am Mus Nat Hist 225:1–111
Westerman M, Loke S, Tan MH, Kear BP (2022) Mitogenome of the extinct desert ‘rat-kangaroo’ times the adaptation to aridity in macropodoids. Sci Rep 12:5829 https://doi.org/10.1038/s41518-022-09568-0
Windsor D, Dagg A (1971) The gaits of the Macropodinae (Marsupialia). J Zool 163:165–175 https://doi.org/10.1111/j.1469-7998.1971.tb04530.x
Acknowledgements
We thank Jin Meng and Judy Galkin (Vertebrate Paleontology) at the American Museum of Natural History (New York, USA) for access to specimens in their care, and Ruth O’Leary and Ana Balcarel for facilitating the scans of Macropus giganteus and Sthenurus stirlingi (and thanks to all, plus Alana Gishlik, for the loan of the foot of Protemnodon viator [= Protemnodon brehus]). We thank other museum curators for access to specimens in their care for the measurements used: Jin Meng and Judy Galkin (Vertebrate Paleontology) and Eileen Westwig and Ross McPhee (Mammalogy) at the American Museum of Natural History (New York, USA); Rob Asher and Mathew Lowe at the University of Cambridge Museum of Zoology (Cambridge, UK); Roberto Portela Miguez at the Natural History Museum (London, UK); David Stemmer and Mary-Anne Binnie at the South Australian Museum (Adelaide, Australia). Helen Ryan and Kenny Travouillon at the Western Australian Museum (Perth, Australia); Tim Ziegler and Karen Roberts at the Museum Victoria (Melbourne, Australia); Sandy Ingleby and Anja Divaljan at the Australian Museum (Sydney, Australia); Kirsten Spring and Scott Hocknull at the Queensland Museum (Brisbane, AUS). For the scanning of the loaned specimens at the University of Bristol we thank Tom Davies and Liz Martin-Silverstone; for the figures, we thank Nuria Melisa Morales-García and Emily Green at Science Graphic Design; we also thank Tom Stubbs, Ben Moon and Nuria Melisa Morales-García for statistical advice, and for two reviewers for their comments on the manuscript.
Funding
Funds from the University of Bristol Program in Palaeobiology enabled the scans. Funds to CMJ from the Bushnell Foundation (Brown University) aided in the collection of linear measurement data for the body mass estimations.
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jones, B., Janis, C.M. Hop, walk or bound? Limb proportions in kangaroos and the probable locomotion of the extinct genus Protemnodon. J Mammal Evol 31, 26 (2024). https://doi.org/10.1007/s10914-024-09725-4
Accepted:
Published:
DOI: https://doi.org/10.1007/s10914-024-09725-4