
Abstract
In this article, we extend the Laplace transform method to obtain analytic solutions for linear RDDEs and NDDEs which have real and complex poles of higher order. Furthermore, we present first-order linear DDEs that feature resonance phenomena. The procedure is similar to the one where all of the poles are order one, but requires one to use the appropriate modifications when using Cauchy’s residue theorem for the poles of higher order. The process for obtaining the solution relies on computing the relevant infinite sequence of poles and then determining the Laplace inverse, via the Cauchy residue theorem. For RDDEs, the poles can be obtained in terms of the Lambert W function, but for NDDEs,the complex poles, in most cases, must be computed numerically. We found that an important feature of first-order linear RDDES and NDDES with poles of higher order is that it is possible to incite the resonance phenomena, which in the counterpart ordinary differential equation cannot occur. We show that despite the presence of higher order poles or resonance phenomena, the solutions generated by the Laplace transform method for linear RDDEs and NDDEs that have higher order poles are still accurate.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Delay differential equations (DDEs) appear in many applications from different fields of science [1,2,3,4,5,6,7,8,9,10]. For instance, several studies of climate models related to the global energy balance or the fundamental workings of the El Niño Southern Oscillation (ENSO) system have been presented using DDEs [11]. In general, the analysis of DDEs is more cumbersome than ordinary differential equations (ODEs). The infinite-dimensional nature of DDEs permits them to generate richer dynamics even with a limited number of variables and parameters [10, 11].
The introduction of delays can change the stability of equilibrium points and Hopf bifurcations may arise [10]. During the last few decades, there have been some new developments for finding different types of solutions of DDEs [5, 12,13,14,15,16,17,18,19,20,21,22]. The method of steps (MoS) is the most well-known method for analytically solving DDEs and it provides the exact solution. This method involves utilizing integration properties to obtain an exact analytical solution by solving the relevant (updated) ODE on each successive interval [23]. The MoS, however, oftentimes is only capable of calculating the solution over a limited set of t values, and therefore, the long-term behavior cannot be easily determined or analyzed [10, 24,25,26,27,28].
The Laplace transform method (LTM) in combination with other methods has been used to solve linear DDEs of retarded (RDDE) and neutral (NDDE) type [14, 25, 28,29,30,31,32]. RDDEs are equations where the time delay only appears in the state whereas NDDEs are equations where the time delay can appear in both the state variable and their time derivative. In addition, the LTM has been used to do stability analysis of DDEs [26, 27, 33,34,35]. Recently, the LT has been used to compute the solutions of models based on Caputo fractional derivatives [36]. The LTM requires the computation of contour integrals. In some earlier works, these integrals have been utilized to solve boundary value problems that involve the computation of residues [37, 38]. In this article, we extend the LTM to derive solutions of linear RDDEs and NDDEs that have real and complex poles of higher order. Furthermore, we present first-order linear DDEs that feature resonance phenomena, where the solutions are composed of exponentials, sines, and cosines with increasing amplitudes as a function of time. To the best of our knowledge, this has not been addressed before. The special case of poles of order two is briefly discussed in [25] but only for the RDDE case. The procedure for obtaining the solution by means of the LTM can be divided into three stages: (i) apply the LT to the DDE, (ii) determine the real and complex poles of the characteristic equation and the corresponding residues, and (iii) compute the inverse LT (ILT) of the solution in the s-space by using Cauchy’s residue theorem [39, 40]. When there are poles of higher order (greater than order \(M=1\)), the required modifications introduce additional terms. These are different from the ones that are present in the solution when there are no higher order poles. We shall show that these terms can cause a bounded solution to become unbounded. For RDDEs, the poles can be obtained in terms of the Lambert W function but for NDDEs, the complex poles, in almost all cases, must be computed numerically. In [28], the authors derived a formula which provides an approximation for the location of the complex poles. In some cases, however, this formula does provide one with the exact location of the poles and therefore numerical methods are not required.
In this article, we show that an important feature of first-order linear RDDES and NDDES with poles of higher order is that it is possible to generate the resonance phenomena, which in the counterpart ordinary differential equation cannot appear. This phenomenon can occur (for instance) when a complex pole has order two. Previous works have obtained resonance for nonlinear DDEs but not for linear ones [6, 11, 41, 42]. We show that despite the presence of higher order real and complex poles or resonance phenomena, the solutions generated by the LTM for linear RDDEs and NDDEs that have higher order poles are accurate and especially for larger t values. Moreover, the steady-state behavior of the solutions can be calculated by the LTM. On the other hand, oftentimes the MoS can just produce the solution for a short time.
The remainder of this article proceeds as follows. In the next section, we develop the procedure to obtain the solutions of linear RDDEs and NDDEs with higher order poles by means of the LTM. In Sect. 3, we present numerical results for linear RDDEs and NDDEs with higher order poles. We measure the accuracy of the solutions produced by the LTM using the solutions obtained by the MoS. In Sect. 4, we present our conclusions.
2 Solving linear DDEs considering the presence of higher order poles
Here, we develop the procedure to obtain the solutions of linear RDDEs and NDDEs with higher order poles by means of the LTM. The process to obtain the solution by means of the LTM can be summarized in a series of steps; (i) first, the LT is applied to the DDE, (ii) we compute all the real poles and a finite number of complex poles of the denominator of the solution in the s-space, and (iii) we compute the ILT of the solution in the s-space by using Cauchy’s residue theorem [39, 40]. The special case of poles of order \(M=2\) is briefly discussed in [25], but only for the RDDE case. For the interested readers, we refer them to previous works [25, 28, 29], where the details of the methodology are presented in greater detail. However, we present some crucial steps in this section and in particular for the cases of poles of higher order for both RDDE and NDDE systems.
First, let us describe the role of the Lambert W function in solving linear DDEs. The characteristic equation of a linear DDE can take on the form of a quasi-polynomial which could have an infinite number of roots. The Lambert W Function provides a means for expressing these roots in terms of Lambert W branches. The equation takes on the form \(z = W(z)\textrm{e}^{W(z)}\) where z is some complex number and W(z) is the complex multi-valued function solution of the equation. For each integer k, we denote \(W_k(z)\) as the k-th branch of the Lambert function. The branch \(W_0(z)\) is called the principal branch. For real numbers, the branches \(W_{0}\) and \(W_{-1}\) can be used to solve the equation \(y\textrm{e}^{y} = x\) with real numbers x and y if \(x \ge -\frac{1}{\textrm{e}}\). The solution, y, can be found using the following conditions:
We note that the second condition implies that in the interval \(-\frac{1}{\textrm{e}} \le x < 0\), the equation \(y\textrm{e}^y = x\) has two real solutions. Further details and applications of the Lambert function can be found in literature such as [43, 44].
Now, let us assume that f(z) is an analytic function in the complex region \(\mathcal {R}\) defined by \(0< |z - z_0| < d\), or the neighborhood of a point \(z = z_0 \in \mathbb {C}\). An isolated singularity is a pole if f(z) can be written as [45, 46]:
where \(M \in \mathbb {N}\) is the order of the pole, \(\psi (z_0) \ne 0\) and \(\psi (z)\) is an analytic function in \(\mathcal {R}\).
Residues of Poles: From Eq. (1), if \(M = 1\), then f(z) has a simple pole at \(z_0\). At a simple pole \(z_0 \in \mathbb {C}\), the residue of f(z) is given by
Now, suppose f(z) can be written as \(f(z)=\frac{N(z)}{D(z)}\), where N(z) and D(z) are analytic functions in \(\mathcal {R}\) and D(z) has a zero at \(z_0\). Let us assume that \(D(z) = (z-z_0)^M\hat{D}(z)\) where \(\hat{D}(z)\) is analytic in \(\mathcal {R}\) and \(\hat{D}(z_0)\) is nonzero. Using the Taylor series expansion of N(z) and \(\hat{D}(z)\), the residue is given as [45, 46]:
Now if we have that \(M\ge 2\), it can be shown through the Taylor Series Expansion of \(\psi (z)\) about \(z_0\) that the residue is given by [45, 46]:
After these basic definitions,we can proceed to solve linear RDDEs and NDDEs with the LTM.
2.1 Solving linear RDDEs in the presence of higher order poles
Let us consider the following linear RDDE with a non-homogeneous term g(t),
Let us define \(\mathcal {L}\left( y(t)\right) =Y(s)\). Considering the homogeneous case and employing the LT to Eq. (5), we obtain the LT transform, \(Y(s) = \frac{N(s)}{D(s)}\) of y(t):
Setting \(D(s) = 0\), we find that the poles of Y(s) occur at \(s_k = a + \frac{1}{\tau }W_k\left( {\tau b\textrm{e}^{-a\tau }}\right) \) for \(k \in \mathbb {Z}\). From the definition of the Lambert function it can be shown that if \(\tau b\textrm{e}^{-a\tau } \ne -\frac{1}{\textrm{e}}\), then the poles \(s_k\) are of order \(M=1\) and employing the ILT, one gets
where the coefficients \(C_{-1,k}\)’s are the calculated residues and the real part is taken due to the definition of the ILT.
Now, if \(\tau b\textrm{e}^{-a\tau } = -\frac{1}{\textrm{e}}\), then we encounter a case where the real pole \(s=a-\frac{1}{\tau }\) is of order \(M=2\) (since \(s_0 = s_{-1}\) by definition of the \(W_0\) and \(W_{-1}\) Lambert branches). Then, from Eq. (4), the residue for a pole \(s_0 = s_{-1}\) of order \(M=2\), we get
Employing the ILT, one obtains
for \(s_0 = a - \frac{1}{\tau }\).
For a linear non-homogeneous RDDE, one gets
where G(s) is the LT of the function g(t). We denote the additional poles introduced by G(s) as \(s_{v,i}\) for \(i = 1,2,\ldots ,V\), \(V \in \mathbb {Z}^{+}\), with corresponding residues \(c_{v,i}\). Employing the ILT and the residue theorem, and assuming \(s_k \ne s_{v,i}\) for all \(k,\; i\), we obtain the solution
where
It is possible that the roots of D(s) and the poles of G(s) may be the same. In which case, the term, Res\(\{Y(s)\textrm{e}^{st};s_{v,i}\}\), is computed according to Eq. (4) for the poles that are the same (when \(s_k = s_{v,i}\) for some k, i). In this paper,we consider the case when a small subset of the poles of G(s) coincide with any of the infinite sequence of the roots of D(s).
2.2 Solving linear NDDEs in the presence of higher order poles
Let us consider the following linear NDDE,
Considering the non-homogeneous case, we obtain the LT transform, \(Y(s) = \frac{N(s) + G(s)}{D(s)}\), of y(t):
where \(D(s) = s - a - b\textrm{e}^{-s\tau } - cs\textrm{e}^{-s\tau }\) and G(s) is the LT of g(t). The roots of D(s) are denoted by \(s_k\) for \(k \in \mathbb {Z}\). We denote the additional poles introduced by G(s) as \(s_{v,i}\) for \(i = 1,2,\ldots ,V\), \(V \in \mathbb {Z}^{+}\), with corresponding residues \(C_{v,i}\). It can be shown that when \(ac+b=0\), D(s) can be factored as \(D(s)=(s-a)(1-c\,\textrm{e}^{-s\tau }).\) Therefore when \(c>0\), there are two real poles, \( s_{-1}=a\) and \(s_{0}=\ln (c)/\tau .\) However, when \(c<0\), there will be only one real pole at \(s_{0}=a\). The second term in the factorization also provides one with the exact location of the complex poles above the x axis:
and
for \(k \in \mathbb {N}\). Depending on the LT of the non-homogeneous term, g(t), we may also obtain a repeated real or complex pole. However, we will see in the next section that a special case arises where we obtain a repeated real pole when \(ac + b \ne 0\) and \(g(t) = 0\).
As in the RDDE case, we may encounter \(s_k = s_{v,i}\) for some k, i. In which case, the term, Res\(\{Y(s)\textrm{e}^{st};s_{v,i}\}\), is computed according to Eq. (4). Otherwise, employing the ILT and the residue theorem, assuming \(s_k \ne s_{v,i}\) for all \(k, \; i\), one gets
where
If \(r = s_k\) or \(r = s_{v,i}\) is a complex pole of order \(M=2\), then we have a complex conjugate pole and we could take advantage of this fact to compute the residue via,
In this way, we reduce the number of operations and therefore the computation time, even though it is not significant. Notice that the procedure that takes longer is the development of the analytical solution which varies depending on the order of the poles, the non-homogeneous term, and the history function.
3 Results
In this section, we present the solutions of a variety of linear RDDEs and NDDEs with higher order poles. We assess the accuracy of the LTM solutions by comparing them with the analytical solutions provided by the MoS.
We rely on Maple to obtain the solution by the LTM. For this section, let us introduce the next notation:
\(\textrm{e}_{Map}(t) = y_{Maple,MoS}(t) - y_{Maple,LT}(t)\): error in the solution y(t) between the MoS and LTM via Maple.
Now, let us proceed with a variety of linear RDDEs and NDDEs examples.
3.1 Linear RDDE examples
In this subsection, we consider several RDDEs in order to show different phenomena that can be obtained depending on the type of poles and the order of them.
Example 1
Consider the next RDDE:
where \(\tau = 2\). Taking the LT, we obtain the quasi-polynomial \(D(s) = (s - 1)\textrm{e}^{2s} + \frac{\textrm{e}}{2}\), which has a real pole at \(s_0 = \frac{1}{2}\). We notice that the condition \(\tau b \textrm{e}^{-a\tau } = -\textrm{e}^{-1}\) is satisfied for the pole of order \(M=2\) given by \(s_0 = s_{-1} = a - \frac{1}{\tau } = \frac{1}{2}\). The remaining poles and residues are as follows: \(s_k = 1 + \frac{1}{2}W_k(-\textrm{e}^{-1})\), \(k \in \mathbb {Z}{\backslash }\{0,-1\}\), with property \(s_{-k-1} = \overline{s_k}\), and \(C_{-1,k} = \frac{N(s_k)}{D'(s_k)}\). Employing the ILT, one gets the LTM solution of y(t):
The solution of Example 1 via MoS (over \(m = 5\) intervals) and LTM (\(n = 100\)) is shown on the left-hand side of Fig. 1. We notice that as \(t \rightarrow \infty \), \(y(t) \rightarrow -\infty \). The solution is unstable due to the presence of a positive real pole. The right-hand side of Fig. 1 shows the graph of the error. It can be observed that the solution generated by the LTM is accurate and its error decreases as t increases.

Solution results of Eq. (15) over \(t \in [0,5\tau ]\) (\(n = 100\) terms): plot of (left) the solution y(t) via MoS and LTM and (right) error \(\textrm{e}_{Map}(t)\)
Example 2
Consider the next RDDE:
where \(\tau = 1\). Taking the LT, we obtain the quasi-polynomial \(D(s) = (s - \frac{1}{3})\textrm{e}^{s} + \textrm{e}^{-2/3}\), which has a real pole at \(s_0 = -\frac{2}{3}\). We notice that the condition \(\tau b \textrm{e}^{-a\tau } = -\textrm{e}^{-1}\) is satisfied for the pole of order \(M=2\) given by \(s_0 = s_{-1} = a - \frac{1}{\tau } = -\frac{2}{3}\). The remaining poles and residues are: \(s_k = \frac{1}{3} + W_k(-\textrm{e}^{-1})\), \(k \in \mathbb {Z}{\backslash }\{0,-1\}\), with property \(s_{-k-1} = \overline{s_k}\), and \(C_{-1,k} = \frac{N(s_k)}{D'(s_k)}\). Employing the ILT, one gets the LTM solution of y(t):
The solution of Example 2 via MoS (over \(m = 10\) intervals) and LTM (\(n = 100\)) is shown on the left-hand side of Fig. 2. We notice that as \(t \rightarrow \infty \), \(y(t) \rightarrow 0\). The solution is stable since all of the poles have negative real parts. The right-hand side of Fig. 2 shows the graph of the error. It can be observed that the solution generated by the LTM is accurate and its error decreases as t increases.

Solution results of Eq. (16) over \(t \in [0,10\tau ]\) (\(n = 100\) terms): plot of (left) the solution y(t) via MoS and LTM and (right) error \(\textrm{e}_{Map}(t)\)
Example 3
Consider the next RDDE:
where \(\tau = 3\). Denote \(G(s) = \frac{1}{2(s + 1/6)}\) as the LT of the function \(g(t) = \frac{\textrm{e}^{-t/6}}{2}\). The additional pole introduced by G(s) is denoted as \(s_{v,1} = -\frac{1}{6}\) with residue \(c_{v,1} = \frac{1}{2}\). Taking the LT, we obtain the quasi-polynomial \(D(s) = \big (s - \frac{1}{3}\big )\textrm{e}^{3s} + \frac{1}{3}\), which has a real pole at \(s_0 = 0\). We notice that the condition \(\tau b \textrm{e}^{-a\tau } = -\textrm{e}^{-1}\) is satisfied for the pole of order \(M=2\) given by \(s_0 = s_{-1} = a - \frac{1}{\tau } = 0\). The remaining poles and residues are as follows: \(s_k = \frac{1}{3} + \frac{1}{3}W_k(-\textrm{e}^{-1})\), \(k \in \mathbb {Z}{\backslash }\{0,-1\}\), with property \(s_{-k-1} = \overline{s_k}\), and \(C_{-1,k} = \frac{N(s_k) + G(s_k)}{D'(s_k)}\). Employing the ILT, one gets the LTM solution of y(t):
The solution of Example 3 via MoS (over \(m = 5\) intervals) and LTM (\(n = 100\)) is shown on the left-hand side of Fig. 3. We notice that as \(t \rightarrow \infty \), \(y(t) \rightarrow -\infty \), and thus the system is unstable. The right-hand side of Fig. 3 shows the graph of the error. It can be observed that the solution generated by the LTM is accurate and its error decreases as t increases.

Solution results of Eq. (17) over \(t \in [0,5\tau ]\) (\(n = 100\) terms): plot of (left) the solution y(t) via MoS and LTM and (right) error \(\textrm{e}_{Map}(t)\)
Example 4
Consider the next RDDE:
where \(\tau = 2\). The characteristic equation of the system is
First, we note that the condition \(\tau b \textrm{e}^{-a\tau } = -\textrm{e}^{-1}\) is satisfied so we obtain a pole \(s_0 = s_{-1} = a - \frac{1}{\tau } = -\ln (2)\) of order \(M = 2\). The Laplace transform of the non-homogeneous term, \(\mathcal {L}\{t^2\left( \frac{1}{2}\right) ^t\} = G(s) = \frac{2}{(s + \ln (2))^3}\), which means \(s_0\) is actually a pole of order \(M=5\). The exact location of the remaining complex poles is given by: \(s_k = \left( \frac{1}{2} - \ln (2))\right) + \frac{1}{2}W_k(-\textrm{e}^{-1})\) for \(k \in \mathbb {Z}{\backslash }\{0,-1\}\). These poles have the property \(s_{-k-1} = \overline{s_k}\) and residue \(C_{-1,k} = \frac{N(s_k) + G(s_k)}{D'(s_k)}\). We also find that Re\((s_k) < 0\) for all integers k and thus, we expect the solution to be asymptotically stable. Employing the ILT, one gets the LTM solution of y(t):
The solution of RDDE Example 4 via MoS (over \(m = 9\) intervals) and LTM (\(n = 100\) terms) in Maple is shown on the left-hand side of Fig. 4. We notice that as \(t\rightarrow \infty \), \(y(t) \rightarrow 0\). The solution is stable since all of the poles have negative real parts. The right-hand side of Fig. 4 shows the graph of the error between MoS and LTM. It can be observed that the solution generated by the LTM is accurate and its error decreases as t increases.

Solution results of Eq. (18) over \(t \in [0,9\tau ]\) (\(n = 100\) terms): plot of (left) the solution y(t) via MoS and LTM and (right) error \(\textrm{e}_{Map}(t)\)
Example 5
Consider the following RDDE:
where \(\tau = \frac{3}{4}\). The characteristic equation of the system is:
There are no real poles and there are an infinite number of complex poles, including \(s_0 = \pi \,i\) and \(s_{-1} = -\pi \,i\). The LT of the non-homogeneous term, \(\mathcal {L}\{\sin (\pi \,t)\} = G(s) = \frac{\pi }{s^2 + \pi ^2}\), which means \(s_0\) and \(s_{-1}\) are actually complex poles of order \(M=2\) with zero real part. The exact location of the remaining complex poles is: \(s_k = (-\pi ) + \frac{4}{3}W_k\left( -\frac{3\sqrt{2}\pi }{4}\textrm{e}^{3\pi /4} \right) \) for \(k \in \mathbb {Z}{\backslash }\{0,-1\}\), with property \(s_{-k-1} = \overline{s_k}\), and \(C_{-1,k} = \frac{N(s_k) + G(s_k)}{D'(s_k)}\). We also find that Re\((s_k)\le 0\) for all integers k. However, due to the repeated complex pole with zero real part, we expect that the solution will oscillate with larger amplitudes as t increases. Employing the ILT, one gets the LTM solution of y(t):
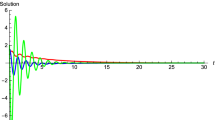
The solution of RDDE Example 5 via MoS and LTM (\(n=50\) terms) in Maple is shown on the left-hand side of Fig. 5. We note that as \(t\rightarrow \infty \), \(y(t)\rightarrow (A_{1}t+A_{0})\cos (\pi t)+(B_{1}t+B_{0})\sin (\pi t),\) where the coefficients \(A_{1},A_{0},B_{1}\) and \(B_{0}\) are constants. These terms are introduced because of the order 2 poles at \(s=\pm \textrm{i}\pi .\) Therefore, mathematically the solution assumes the same form as that of a mass-spring system, when the external force is chosen to induce resonance. The complex poles at \(s=\pm \textrm{i}\pi \) effectively constitute a natural frequency for the DDE (19). The resonance is caused by the inclusion of the non-homogeneous forcing function, with this same frequency. However, from the right-hand side of Fig. 5, it can be observed that the error of the LTM solution decreases as \(t\rightarrow \infty \). Note that despite the fact that the real part of all the poles is non-positive, the solution is unstable due to the repeated complex poles.

Solution results of Eq. (19) over \(t \in [0,17]\) (\(n = 50\) terms): plot of (left) the solution y(t) via MoS and LTM and (right) error \(\textrm{e}_{Map}(t)\)
3.2 Linear NDDE examples
Example 1
Consider the following NDDE:
where \(\tau = 2\). The characteristic equation of the system is:
which has two real poles at \(r_0 = 0\) and \(r_1 = -\frac{1}{2}\). The Laplace transform of the non-homogeneous term, \(\mathcal {L}\{\sin (2\pi t)\} = G(s) = \frac{2\pi }{(s + 2\pi \textrm{i})(s - 2\pi \textrm{i})}\), introduces two additional poles, \(s_{v,1} = 2\pi \textrm{i}\) and \(s_{v,2} = -2\pi \textrm{i}\).
Since the condition \(ac + b = 0\) is satisfied, then the exact location of the remaining complex poles is given by: \(s_k = \frac{\ln (c) + 2k\pi \textrm{i}}{\tau } = k\pi \textrm{i}\) for \(k \in \mathbb {Z}{\backslash }\{0\}\). Note, when \(k = -2,2\), then \(s_{-2} = s_{v,2}\) and \(s_{2} = s_{v,1}\) are complex poles of order \(M = 2\). Employing the ILT, one gets the LTM solution of y(t) (note, here \(N(s) = 0\)):
The solution of NDDE Example 1 via MoS (over \(m = 8\) intervals) and LTM (\(n = 50\) terms) in Maple is shown on the left-hand side of Fig. 6. We notice that as \(t\rightarrow \infty \), \(y(t) \rightarrow \infty \). The right-hand side of Fig. 6 plots the error between MoS and LTM. Note that despite all poles have negative or zero real parts, the solution is unstable due to the resonance phenomenon. It can be observed that the solution generated by the LTM is accurate and its error decreases as t increases.

Solution results of Eq. (20) over \(t \in [0,8\tau ]\) (\(n = 50\) terms): plot of a the solution y(t) via MoS and LTM and b error \(\textrm{e}_{Map}(t)\)
Example 2
Consider the following NDDE:
where \(\tau =1\). The characteristic equation of the system is:
which has two real poles at \(r_0 = -\ln (2)\) and \(r_1 = -\frac{1}{3}\). The Laplace transform of the non-homogeneous term, \(\mathcal {L}\{\left( \frac{1}{2}\right) ^t\} = G(s) = \frac{1}{s + \ln (2)}\), introduces an additional real pole, \(s_{v,1} = -\ln (2)\). Thus, \(r_0 = s_{v,1}\) is a negative real pole of order \(M = 2\).
Since the condition \(ac + b = 0\) is satisfied, then the exact location of the remaining complex poles is given by: \(s_k = \frac{\ln (c) + 2k\pi \textrm{i}}{\tau } = -\ln (2) + 2k\pi \textrm{i}\) for \(k \in \mathbb {Z}{\backslash }\{0\}\). Note that Re\((r_0) < 0\), Re\((r_1)< 0\), and Re\((s_k) < 0\) for all k. Thus, we expect the solution to be asymptotically stable. Employing the ILT, one gets the LTM solution of y(t):
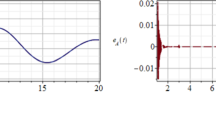
The solution of NDDE Example 2 via MoS (over \(m = 20\) intervals) and LTM (\(n = 100\) terms) in Maple is shown on the left-hand side of Fig. 7. We notice that as \(t\rightarrow \infty \), \(y(t) \rightarrow 0\). This is due to the fact that all poles have negative real parts. The right-hand side of Fig. 7 plots the error between MoS and LTM.

Solution results of Eq. (21) over \(t \in [0,20\tau ]\) (\(n = 100\) terms): plot of (left) the solution y(t) via MoS and LTM and (right) error \(\textrm{e}_{Map}(t)\)
Example 3
Consider the following NDDE:
where \(\tau =1\). The characteristic equation of the system is:
which has a real pole at \(r_{0}=0\) of order \(M=2\). In [28], it was shown that when \(c>0\) and for sufficiently large \(k\in \mathbb {Z}{\backslash }\{0\} \), the remaining complex poles lie relatively close to the imaginary axis, and can be approximated with the initial guesses \(s_{k}\approx \frac{\ln (c)+2k\pi \textrm{i}}{\tau }\approx -0.1054+2k\pi \textrm{i}\). Employing the ILT, one gets the LTM solution of y(t):
The solution of NDDE Example 3 via MoS (over \(m=24\) intervals) and the LTM (\( n=100\) terms) in Maple is shown on the left of Fig. 8. The terms in the infinite sum become negligible as \(t\rightarrow \infty \) because all of the complex poles have negative real parts. Therefore, as \(t\rightarrow \infty \), \( y(t)\rightarrow \infty \). More specifically
Notice that the real pole at \(r_{0}=0,\) of order 2, introduces the linear growth term, resulting in a behavior that is in some way analogous to the resonance phenomenon. Figure 8b plots the error between MoS and LTM.

Solution results of Eq. (22) over \(t \in [0,24\tau ]\) (\(n = 100\) terms): plot of a the solution y(t) via MoS and LTM and b error \(\textrm{e}_{Map}(t)\)
4 Conclusions
In this work, we extended the Laplace transform method to obtain the analytic solutions for linear RDDEs and NDDEs which have real and complex poles of higher order. The procedure is similar to the one where all of the poles are order one, but requires one to use the appropriate modifications when using Cauchy’s Residue Theorem for the poles of higher order. This, as a consequence, introduces at least one additional term in the series solution which is typically of a different form to those at the simple poles. The process for obtaining the solution relies on computing the relevant infinite sequence of poles and then determining the Laplace inverse, via the Cauchy residue theorem. For RDDEs, the poles can be obtained in terms of the Lambert W function, but for NDDEs,the complex poles, in almost all cases, must be computed numerically. In [28],the authors derived a formula which provides an approximation for the location of the complex poles. In some cases, however, this formula does provide one with the exact location of the poles, and therefore, numerical methods are not required.
We found that an important feature of first-order linear RDDES and NDDES with poles of higher order is that it is possible to incite the resonance phenomena, which, in the counterpart ordinary differential equation, cannot appear. This phenomenon can occur for instance when a complex pole has order two. For any NDDE which requires one to compute the complex poles numerically, it is essentially impossible to introduce a non-homogeneous term that guarantees a repeated complex pole. Since the complex poles are computed with numerical methods, almost always these complex poles have infinitely many digits, and therefore, it is difficult to have a non-homogeneous term that generates this type of complex pole. However, it is possible to select parameter sets that ensure that the formula for the approximate location of the complex poles provides one with the exact location of these poles. Therefore, we were able to design NDDEs with complex poles of higher order. We show that despite the presence of higher order real and complex poles or resonance phenomena, the LTM is able to generate accurate solutions of linear RDDEs and NDDEs. These solutions are even more accurate for larger t values. This is a main strength of the method since oftentimes the MoS can only provide the solution for the first few time intervals.
References
Alfifi HY (2021) Feedback control for a diffusive and delayed Brusselator model: semi-analytical solutions. Symmetry 13(4):725
Aljahdaly NH, El-Tantawy S (2021) On the multistage differential transformation method for analyzing damping Duffing oscillator and its applications to plasma physics. Mathematics 9(4):432
Arino J, Van Den Driessche P (2006) Time delays in epidemic models. In: Delay differential equations and applications. Springer, New York, pp. 539–578
van den Berg R, Lefeber E, Rooda K (2007) Modeling and control of a manufacturing flow line using partial differential equations. IEEE Trans Control Syst Technol 16(1):130–136
Ebaid A, Al-Enazi A, Albalawi BZ, Aljoufi MD (2019) Accurate approximate solution of Ambartsumian delay differential equation via decomposition method. Math Comput Appl 24(1):7
Haghi H, Kolios MC (2022) The role of primary and secondary delays in the effective resonance frequency of acoustically interacting microbubbles. Ultrason Sonochem 86:106033
Halanay A, Safta CA (2020) A critical case for stability of equilibria of delay differential equations and the study of a model for an electrohydraulic servomechanism. Syst Control Lett 142:104722
Nelson PW, Murray JD, Perelson AS (2000) A model of HIV-1 pathogenesis that includes an intracellular delay. Math Biosci 163(2):201–215
Ruschel S, Pereira T, Yanchuk S, Young LS (2019) An SIQ delay differential equations model for disease control via isolation. J Math Biol 79(1):249–279
Smith HL (2011) An introduction to delay differential equations with applications to the life sciences, vol 57. Springer, New York
Keane A, Krauskopf B, Postlethwaite CM (2017) Climate models with delay differential equations. Chaos 27(11):114309
Bellour A, Bousselsal M, Laib H (2020) Numerical solution of second-order linear delay differential and integro-differential equations by using Taylor collocation method. Int J Comput Methods 17(09):1950070
Chamekh M, Elzaki TM, Brik N (2019) Semi-analytical solution for some proportional delay differential equations. SN Appl Sci 1(2):1–6
Cimen E, Uncu S (2020) On the solution of the delay differential equation via Laplace transform. Commun Math Appl 11(3):379–387
Cortés JC, Delgadillo-Alemán SE, Kú-Carrillo RA, Villanueva RJ (2021) Full probabilistic analysis of random first-order linear differential equations with Dirac delta impulses appearing in control. Math Methods Appl Sci
Eftekhari SA (2015) A differential quadrature procedure with regularization of the Dirac-delta function for numerical solution of moving load problem. Latin Am J Solids Struct 12(7):1241–1265
Jaaffar NT, Abdul Majid Z, Senu N (2020) Numerical approach for solving delay differential equations with boundary conditions. Mathematics 8(7):1073
Jamilla CU, Mendoza RG, Mendoza VMP (2020) Explicit solution of a Lotka-Sharpe-McKendrick system involving neutral delay differential equations using the r-lambert W function. Math Biosci Eng 17(5):5686–5708
Jamilla C, Mendoza R, Mező I (2020) Solutions of neutral delay differential equations using a generalized Lambert W function. Appl Math Comput 382:125334
Jornet M (2021) Exact solution to a multidimensional wave equation with delay. Appl Math Comput 409:126421
Shampine LF, Thompson S (2001) Solving ddes in matlab. Appl Numer Math 37(4):441–458
Shampine LF, Thompson S (2009) Numerical solution of delay differential equations. In: Delay differential equations, pp 1–27. Springer
Sherman M, Kerr G, González-Parra G (2022) Comparison of symbolic computations for solving linear delay differential equations using the Laplace transform method. Math Comput Appl 27(5):81
Bauer RJ, Mo G, Krzyzanski W (2013) Solving delay differential equations in S-ADAPT by method of steps. Comput Methods Prog Biomed 111(3):715–734
Heffernan JM, Corless RM (2006) Solving some delay differential equations with computer algebra. Math Sci 31(1):21–34
Kalmár-Nagy T (2009) Stability analysis of delay-differential equations by the method of steps and inverse Laplace transform. Differ Equ Dyn Syst 17(1–2):185–200
Kaslik E, Sivasundaram S (2012) Analytical and numerical methods for the stability analysis of linear fractional delay differential equations. J Comput Appl Math 236(16):4027–4041
Kerr G, González-Parra G (2022) Accuracy of the Laplace transform method for linear neutral delay differential equations. Math Comput Simul 197:308–326
Kerr G, González-Parra G, Sherman M (2022) A new method based on the Laplace transform and Fourier series for solving linear neutral delay differential equations. Appl Math Comput 420:126914
Mishra HK, Tripathi R (2020) Homotopy perturbation method of delay differential equation using he’s polynomial with laplace transform. Proc Natl Acad Sci India Sect A 90:289–298
Yi S, Ulsoy AG, Nelson PW (2006) Solution of systems of linear delay differential equations via Laplace transformation. In: Proceedings of the 45th IEEE conference on decision and control, pp 2535–2540. IEEE
Yan Y, Ren Q, Xia N, Zhang L (2016) A close-form solution applied to the free vibration of the Euler-Bernoulli beam with edge cracks. Arch Appl Mech 86(9):1633–1646
Kalmár-Nagy T (2005) A novel method for efficient numerical stability analysis of delay-differential equations. In: Proceedings of the 2005, American Control Conference, pp 2823–2826. IEEE
Krol K (2011) Asymptotic properties of fractional delay differential equations. Appl Math Comput 218(5):1515–1532
Marian D (2021) Laplace transform and Semi-Hyers-Ulam-Rassias stability of some delay differential equations. Mathematics 9(24):3260
Tanriverdi T, Baskonus HM, Mahmud AA, Muhamad KA (2021) Explicit solution of fractional order atmosphere-soil-land plant carbon cycle system. Ecol Complex 48:100966
Tanriverdi T (2009) Differential equations with contour integrals. Integral Transform Spec Funct 20(2):119–125
Tanriverdi T, Mcleod JB (2007) Generalization of the eigenvalues by contour integrals. Appl Math Comput 189(2):1765–1773
Brown JW, Churchill RV (2009) Fourier series and boundary value problems. McGraw-Hill Book Company, New York
Conway JB (2012) Functions of one complex variable II, vol 159. Springer, New York
Calleja RC, Humphries A, Krauskopf B (2017) Resonance phenomena in a scalar delay differential equation with two state-dependent delays. SIAM J Appl Dyn Syst 16(3):1474–1513
Chen Y, Xu J (2013) Applications of the integral equation method to delay differential equations. Nonlinear Dyn 73:2241–2260
Corless RM, Gonnet GH, Hare DE, Jeffrey DJ, Knuth DE (1996) On the lambertw function. Adv Comput Math 5(1):329–359
Yi S, Duan S, Nelson P, Ulsoy A (2012) The Lambert W function approach to time delay systems and the LambertW_DDE toolbox. IFAC Proc Vol 45(14):114–119
Ablowitz M, Fokas A (2003) Complex variables: introduction and applications, 2nd edn. Cambridge University Press, Cambridge
Brown J, Churchill R (2009) Complex variables and applications, 8th edn. McGraw-Hill, New York
Funding
Open access funding provided by SCELC, Statewide California Electronic Library Consortium
Author information
Authors and Affiliations
Contributions
MS, GK,and GGP wrote the main manuscript text and prepared all figures. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sherman, M., Kerr, G. & González-Parra, G. Analytic solutions of linear neutral and non-neutral delay differential equations using the Laplace transform method: featuring higher order poles and resonance. J Eng Math 140, 12 (2023). https://doi.org/10.1007/s10665-023-10276-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10665-023-10276-5