
Abstract
We present an elementary and self-contained proof that there are exactly four symmetry classes of the elasticity tensor in two dimensions: oblique, rectangular, square, and isotropic. In two dimensions, orthogonal transformations are either reflections or rotations. The proof is based on identification of constraints imposed by reflections and rotations on the elasticity tensor, and it simply employs elementary tools from trigonometry, making the proof accessible to a broad audience. For completeness, we identify the sets of transformations (rotations and reflections) for each symmetry class and report the corresponding equations of motions in classical linear elasticity.


Similar content being viewed by others

Notes
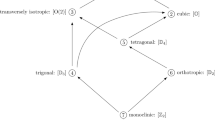
There does not appear to be a consensus in the literature for the naming of the symmetry classes in two dimensions. For instance, in [1] the symmetry classes are labeled monoclinic, orthotropic, tetragonal, and isotropic.
References
Auffray, N., Kolev, B., Olive, M.: Handbook of bi-dimensional tensors: Part I: Harmonic decomposition and symmetry classes. Math. Mech. Solids 22(9), 1847–1865 (2017)
Blinowski, A., Ostrowska-Maciejewska, J., Rychlewski, J.: Two-dimensional Hooke’s tensors - isotropic decomposition, effective symmetry criteria. Arch. Mech. 48(2), 325–345 (1996)
Bóna, A., Bucataru, I., Slawinski, M.A.: Material symmetries of elasticity tensors. Q. J. Mech. Appl. Math. 57(4), 583–598 (2004)
Chadwick, P., Vianello, M., Cowin, S.C.: A new proof that the number of linear elastic symmetries is eight. J. Mech. Phys. Solids 49(11), 2471–2492 (2001)
Dummit, D.S., Foote, R.M.: Abstract Algebra, 3rd edn. Wiley, New York (2004)
Forte, S., Vianello, M.: Symmetry classes for elasticity tensors. J. Elast. 43(2), 81–108 (1996)
Forte, S., Vianello, M.: A unified approach to invariants of plane elasticity tensors. Meccanica 49(9), 2001–2012 (2014)
He, Q.-C., Zheng, Q.-S.: On the symmetries of 2D elastic and hyperelastic tensors. J. Elast. 43(3), 203–225 (1996)
Timoshenko, S.: Theory of Elasticity. Engineering Societies Monographs. McGraw-Hill, New York (1934)
Ting, T.C.T.: Anisotropic Elasticity: Theory and Applications. Oxford University Press, London (1996)
Ting, T.C.T.: Generalized Cowin–Mehrabadi theorems and a direct proof that the number of linear elastic symmetries is eight. Int. J. Solids Struct. 40(25), 7129–7142 (2003)
Tsai, S.W., Pagano, N.J.: Invariant properties of composite materials. Tech. Rep. AFML-TR-67-349, Air Force Materials Laboratory, Wright-Patterson Air Force Base, Ohio (1968)
Vannucci, P.: Plane anisotropy by the polar method. Meccanica 40(4), 437–454 (2005)
Vianello, M.: An integrity basis for plane elasticity tensors. Arch. Mech. 49(1), 197–208 (1997)
Acknowledgements
Research sponsored by the Laboratory Directed Research and Development Program of Oak Ridge National Laboratory, managed by UT-Battelle, LLC, for the U. S. Department of Energy.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of Interest/Competing Interests
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This manuscript has been authored in part by UT-Battelle, LLC, under contract DE-AC05-00OR22725 with the US Department of Energy (DOE). The US government retains and the publisher, by accepting the article for publication, acknowledges that the US government retains a nonexclusive, paid-up, irrevocable, worldwide license to publish or reproduce the published form of this manuscript, or allow others to do so, for US government purposes. DOE will provide public access to these results of federally sponsored research in accordance with the DOE Public Access Plan (http://energy.gov/downloads/doe-public-access-plan).
Sandia National Laboratories is a multimission laboratory managed and operated by National Technology & Engineering Solutions of Sandia, LLC, a wholly owned subsidiary of Honeywell International Inc., for the U.S. Department of Energy’s National Nuclear Security Administration under contract DE-NA0003525. This paper describes objective technical results and analysis. Any subjective views or opinions that might be expressed in the paper do not necessarily represent the views of the U.S. Department of Energy or the United States Government.
Appendices
Appendix A: Equations of Motion in Two-Dimensional Classical Linear Elasticity
In this section, we consider the equation of motion (8) for representative members of each of the four symmetry classes. The corresponding elasticity tensors are given in Theorem 1.
Oblique: There are no restrictions on the elasticity tensor ℂ under oblique symmetry and thus the oblique equation of motion (in component form) is given by (8), which we write out explicitly:
Rectangular: Imposing the rectangular symmetry restrictions (20) on (46a) and (46b) produces the rectangular equation of motion (in component form):
Square: Imposing the square symmetry restrictions (27) on (46a) and (46b) produces the square equation of motion (in component form):
Isotropic: Imposing the isotropic symmetry restrictions (31) on (46a) and (46b) produces the isotropic equation of motion (in component form):
Appendix B: Linearization of the Components of the Elasticity Tensor Under Reflections and Rotations
In this section, we linearize the expressions of the transformed components of the elasticity tensor in order to identify interesting properties of the two-dimensional elasticity tensor. Under the transformation \(\mathbf{Q} = \mathbf{Ref}(\alpha )\), the components of the elasticity tensor ℂ are (see (11))
Similarly, under the transformation \(\mathbf{Q} = \mathbf{Rot}(\alpha ) \), the components of the elasticity tensor ℂ are
One immediate observation from (50) and (51) is that the expressions do not contain sine and cosine of odd multiples of \(\alpha \). This is not entirely unexpected as the transformation (see (11) with \(\mathbf{Q}\) given by (12) or (13)) employs terms of the form \((\cos (2 \alpha ))^{n} (\sin (2 \alpha ))^{4-n}\) in (50) and \((\cos (\alpha ))^{n} (\sin (\alpha ))^{4-n}\) in (51) for \(n \in \left \{ 0,1,2,3,4 \right \}\), which when linearized, produce constant terms and terms of the form \(\cos (2m \alpha )\) and \(\sin (2m \alpha )\) for \(m \in \left \{1,2,3,4 \right \}\). For rotations, this was observed in [12] wherein the so-called parameters of Tsai and Pagano were introduced. Additionally, there are deeper connections between the harmonic decomposition of the elasticity tensor and this linearized form of the transformed components of ℂ under rotations which were explored in [7].
Appendix C: Orthogonal Transformations in Two Dimensions
For the sake of completeness, this section presents a proof that, in two dimensions, orthogonal transformations are either rotations or reflections. The proof presented here is straightforward and we make no claims of originality.
Proposition 1
In two dimensions, orthogonal transformations are either rotations or reflections.
Proof
Let
be an orthogonal transformation in two dimensions. Consequently, \(\mathbf{A} \mathbf{A}^{T} = \mathbf{I}\) with \(\mathbf{I}\) the identity transformation, which implies
From (53), we see that the points \((a,b)\) and \((c,d)\) lie on the unit circle and without loss of generality we may introduce angles \(\theta , \phi \in [0,2 \pi )\) such that
for some \(k \in \mathbb{Z}\).
If \(k\) is even, then from the periodicity of the sine and cosine functions, as well as the fact that the sine function is simply a quarter period shift of the cosine function, we have
From (13), we see that (56) corresponds to a reflection about the line through the origin making an angle of \(\frac{\theta}{2}\) with the \(x\)-axis.
Alternatively, if \(k\) is odd, then from the periodicity of the sine and cosine functions, the fact that the sine function is simply a quarter period shift of the cosine function, and the odd and even properties of the sine and cosine functions, respectively, we have
From (12), we see that (57) corresponds to a clockwise rotation by an angle \(\theta \) about the origin, or equivalently a counterclockwise rotation by an angle \(-\theta \) about the origin. □
Appendix D: Invariance of the Elasticity Tensor with Respect to \(\mathbf{Ref}(\alpha )\)
This section presents a proof that, under particular conditions on its components, the elasticity tensor ℂ is invariant with respect to a specific reflection transformation.
Lemma 3
Let \(C_{ijkl}\), for \(i,j,k,l \in \left \{1,2 \right \}\), be the components of the elasticity tensor ℂ. If \(C_{1111} = C_{2222}\), \(C_{1112} = -C_{2212}\), and there exists an \(\alpha \in \left ( 0, \frac{\pi}{4} \right )\) such that
then ℂ is invariant under the transformation \(\mathbf{Ref}(\alpha )\).
Proof
Recall ℂ is invariant under the transformation \(\mathbf{Ref}(\alpha )\) if (11) holds with \(\mathbf{Q} = \mathbf{Ref}(\alpha )\). Conveniently, the components of the elasticity tensor under the transformation \(\mathbf{Ref}(\alpha )\) are presented in (50). Demonstrating \(C_{ijkl}' = C_{ijkl}\) for \(i,j,k,l \in \left \{1,2 \right \}\) in (50) proves the invariance of the elasticity tensor under the transformation \(\mathbf{Ref}(\alpha )\). We start by substituting the assumptions \(C_{2222} = C_{1111}\) and \(C_{2212} = -C_{1112}\) into (50) to obtain
Next, we subtract \(C_{ijkl}\) from both sides of each equation, where the indices correspond to the indices of \(C_{ijkl}'\) in each equation. This is followed by combining like terms to find
Note that in the equations for \(C_{2212}'\) and \(C_{2222}'\) in (60), we employed the assumptions \(C_{2212} = -C_{1112}\) and \(C_{2222} = C_{1111}\), respectively. To complete the proof, we demonstrate the right-hand side of each equation in (60) is null. Up to a change in sign, there are only two unique expressions on the right-hand sides of the equations in (60):
Based on the final assumption (58), we substitute \(\left ( {\frac {C_{{1111}}}{4}}-{\frac {C_{{1122}}}{4}}-{\frac {C_{{1212}}}{2}} \right ) = \frac{1}{2} C_{1112} ( \cot (2\alpha ) - \tan (2\alpha ) )\) into (61) to obtain
Employing the trigonometric identities \(\cot (2\alpha )-\tan (2\alpha ) = 2 \cot (4\alpha ), 1-\cos (8 \alpha ) = 2 \sin ^{2}(4\alpha ), 1+\cos (8\alpha ) = 2 \cos ^{2}(4 \alpha )\), and \(\sin (8\alpha ) = 2 \sin (4 \alpha ) \cos (4 \alpha )\), we may transform (62) into
The equalities in (63) follow by recalling the identity \(\cot (4\alpha ) = \frac{\cos (4 \alpha )}{\sin (4\alpha )}\). Consequently, the right-hand sides of (60) are null and thus \(C_{ijkl}' = C_{ijkl}\) for \(i,j,k,l \in \left \{1,2 \right \}\). We conclude ℂ is invariant under the transformation \(\mathbf{Ref}(\alpha )\). □
Rights and permissions
About this article

Cite this article
Trageser, J., Seleson, P. A New Proof That the Number of Linear Elastic Symmetries in Two Dimensions Is Four. J Elast 150, 221–239 (2022). https://doi.org/10.1007/s10659-022-09902-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10659-022-09902-7