
Abstract
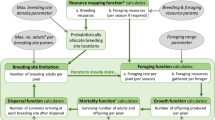
Most models designed to understand how to manage infected wildlife systems with bioeconomic multi-stability take the initial conditions as given, thereby treating pathogen invasion as unanticipated. We examine how ex ante management is an opportunity to influence the ex post conditions, which in turn affect the ex post optimal outcome. To capture these ex ante management choices, we extend the Poisson “collapse” model of Reed and Heras (Bull Math Biol 54:185–207, 1992) to allow for endogenous initial conditions and ex post multi-stability. We account for two uncertain processes: the introduction and establishment of the pathogen. Introduction is conditional on anthropogenic investments in prevention, and both random processes are conditional on how we manage the native population to provide natural prevention of invasion and natural insurance against establishment placing the system in an undesirable basin of attraction. We find that both multi-stability of the invaded system and these uncertainty processes can create economic non-convexities that yield multiple candidate solutions to the ex ante optimization problem. Additionally, we illustrate how the nature of natural protection against introduction and establishment risks can play an important role in the allocation of anthropogenic investments.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Wildlife vectors transmit infectious pathogens within and between species, posing significant risks to both ecological and human health (see for example Daszak et al. 2000; Economist 2005; Jones et al. 2008).Footnote 1 Managing these risks cost-effectively requires taking both an ex ante and ex post perspective into consideration—the pre- and post-pathogen states of the world—as these states are ecologically and economically linked (Perrings 2005; Finnoff et al. 2016). Indeed, it is well-established that the state of the non-invaded system typically plays an important role for pathogen invasion success (Case 1990; Namba and Takahashi 1993; Gilligan and van den Bosch 2008), particularly for at-risk wildlife populations (Daszak et al. 2000, 2001 and Lloyd-Smith et al. 2005). This means ex ante management affects the odds and potential magnitude and economic consequences of invasion, with the ex ante incentives for investing in protection depending on the expected management of the ex post system. Public health agencies and organizations appear to recognize these linkages, as investing in ex ante disease prevention has become a priority and a key element of the “One Health” approach to disease management (e.g., CDC 2011; The World Bank 2013).
Yet most bioeconomic pathogen models have focused on the ex post state—optimal management given a pathogen has already been introduced into the system (e.g., Horan and Wolf 2005; Fenichel and Horan 2007a, b; Horan and Melstrom 2011; Horan et al. 2011a, b). This approach treats the ex post initial conditions as exogenous, implying that managers are unable to take actions to affect the odds and potential magnitude of invasion.Footnote 2 The limited bioeconomic research on ex ante management (Horan and Fenichel 2007; also see Berry et al. (2015) for a human disease application) considers the role of prevention efforts in reducing the likelihood of an outbreak, but generally treats the initial conditions for any potential outbreak as exogenous. This is a concern given that multi-stability can arise in systems invaded by harmful pathogens (Kremer 1996; Chakraborty et al. 2010; Chen et al. 2011), which means the conditions of the system at the time of the outbreak might critically affect ex post outcomes (Dasgupta and Mäler 2003; Brock and Starrett 2003).Footnote 3
Finnoff et al. (2016) recently examined the optimal ex ante management of a native species when this management affects the likelihood and magnitude of a potential non-native species invasion. They showed how both the bioeconomic multi-stability of the invaded system and uncertainty about the invasion can create economic non-convexities that yield multiple candidate solutions to the ex ante optimization problem. In their model, the native species acted as a form of natural insurance-cum-prevention: a larger stock of the native species had the dual effect of reducing the likelihood of an invasion, and of increasing the likelihood that any invasion would lead to the more desirable basin of attraction.
Our analysis examines the management of pathogen invasion risks to a native wildlife population. This analysis is based on Finnoff et al.’s (2016) model, except that we introduce a key difference in the nature of the endogenous risks. Specifically, the wildlife population does not provide natural insurance-cum-prevention in the current setting. A larger wildlife stock does provide natural insurance in our model. However, a larger and denser wildlife stock is subject to greater invasion risks, at least for some densities. This means we have a compound probability problem in which the wildlife stock has opposing effects on the two forms of protection, prevention and insurance (also see Finnoff et al. 2013 on compound lotteries in endogenous risk models). This means the net effect of conservation on protection endogenously depends on whether the natural insurance or natural prevention effect of natural capital dominates at the current state. Moreover, investments in anthropogenic prevention and in natural capital are complements for conveying prevention in our model, whereas they are always substitutes in Finnoff et al.’s (2016) analysis. This has implications for the mix of controls.
As with Finnoff et al.’s (2016) analysis, we find that endogenous invasion risks and ex post economic multi-stability can create ex ante multi-stability. However, the magnitudes of the equilibrium wildlife stock levels relative to the risk-free case, and the incentives for pursuing the various equilibria, differ in our model relative to Finnoff et al. (2016). These differences stem from the different tradeoffs associated with anthropogenic and natural prevention and insurance in the current model. In our numerical example, the natural insurance effect dominates the natural prevention effect.
2 The Model
Suppose a resource manager manages a stock of N wildlife to provide economically valuable harvests. We assume the population resides in a fixed land area with a constant carrying capacity, so that animal numbers are proportional to animal density. The population is at risk from a potential invasion by a pathogen for which there is no vaccine. Ex post, the number of infected animals is denoted I and the number of healthy but susceptible animals is denoted S, with \({ N = S + I}\). We assume for simplicity that introduction and establishment of the pathogen, and the economic realization of these processes, occur simultaneously to produce an invasion at some date T. Dividing time into the ex ante pre-invasion interval \(t < T\), and the ex post or post-invasion interval \(t \ge T\) allows us to focus on how pre-invasion decisions determine the initial conditions in the post-invasion management problem. Conversely, the distinction allows us to gain new intuition into ex ante population management where managers benefit from considering the potential ex post impacts of ex ante decisions. We begin by examining the ex post problem. Our discussion is facilitated by adopting a specification analogous to that of Fenichel and Horan (2007b) for the special case of their model with one control (harvests) and no disease-related damages outside the wildlife sector.
The ex post economic problem
Dynamics for the two sub-populations in the post-invasion setting (\(t \ge T\)) are given by
where S and I are the relevant states in the ex post setting, with the variable N simply serving as a placeholder here to represent \(N=S+I\), and h is a harvest rate representing the relevant control. The net growth relations \(g\left( \cdot \right) \) and \(f\left( \cdot \right) \) take the logistic form, \(g\left( {N,S} \right) =\alpha S\left( {1-N/K} \right) \) and \(f\left( {N,I} \right) =\alpha I\left( {1-N/K} \right) \), where \(\upalpha \) is the intrinsic growth rate and K is the carrying capacity. The function \(f\left( {N,I} \right) \) represents vertical transmission. Horizontal disease transmission is given by \(\uptau (\cdot )\), which takes on the standard, density-dependent form \(\tau \left( {S,I} \right) =\beta SI\) (McCallum et al. 2001). The mortality rate due to infection is \(\updelta \).
The harvest rate h serves as the control and is non-selective, as harvests are applied uniformly across sub-populations. This is because we assume an animal’s infection status is unknown when harvests occur. This assumption is reasonable for many diseases—many infected animals do not exhibit outward signs of the disease until the later stages of infection (Cleaveland et al. 2001).
Net benefits in each instant are given by \([{ pS} - c]h\), where p is the marginal value of harvests and c is a cost parameter such that \([{ pS - c}]\) is the net marginal value of a unit of harvest. Although harvests are non-selective, we assume an animal’s infection status is observable after it is killed, either due to testing or observable signs (e.g., lesions from bovine tuberculosis) once the animal is cut open. Infected animals are less valuable than healthy animals, and for simplicity we assume them to be worthless. This loss in value, along with the loss of healthy animals due to disease transmission, represents the primary disease costs in our model.
Given our specification, and assuming a discount rate of r, the present value of net benefits (discounted to time T) for the ex post problem are
where \(S^{T}\) and \(I^{T}\) are the initial states for the ex post system. Problem (3) is a linear control problem. The solution follows from the maximum principle being applied to the current value Hamiltonian \(H^{\textit{ex post}}=\left[ {pS-c} \right] h+\eta _S {\dot{S}}+\eta _{I}{\dot{I}}\), where \(\upeta _{i}\) is the co-state for state \(i \in \{S,I\}\). The singular solution is defined by the first order condition \(\frac{\partial H^{\textit{ex post}}}{\partial h}=pS-c-\eta _S S-\eta _I I=0\) and the adjoint conditions \({\dot{\eta }_i} = r{\eta _i} - \frac{{\partial {H^{\textit{ex post}}}}}{{\partial i}}\) for \(i \in \{S,I\}\). A singular feedback rule h(S, I) can be derived by time differentiating the singular first order condition twice and applying the adjoint conditions and equations of motion. Alternatively, non-singular solutions may arise when \(\frac{\partial H^{\textit{ex post}}}{\partial h}\ne 0\): \(h = 0\) is optimal when \(\frac{\partial H^{\textit{ex post}}}{\partial h}<0\), and \(h=h^{max}\) (or an impulse control, \(h\rightarrow \infty \), if \(h^{max}\) is not defined) is optimal when \(\frac{\partial H^{\textit{ex post}}}{\partial h}>0\). These non-singular solutions represent most rapid approach paths (MRAPs).
We begin by focusing on the singular solution h(S, I). The analytical solution for h(S, I) is too complex to present or interpret here. Instead, we rely on a numerical example with the parameter values \(p = 20\), \(c = 400\), \(r = 0.05\), \(\upalpha = 0.25\), \(K = 100\), \(\upbeta = 0.005\), and \(\updelta = 0.2\). This numerical example results in h(S, I) being defined along the separatrices, or saddle path, associated with a saddle point equilibrium. Specifically, the saddle path is defined as a locus of points, or a trajectory, in the state space along which h(S, I) is non-negative and finite. Non-singular solutions are optimal for combinations of states not on the saddle path. These results mean we need to examine the state space to analyze the solution.
Figure 1 presents the solution to the ex post problem as a feedback control diagram (Clark 2005), under the assumption that impulse controls are applied when \(\frac{\partial H^{\textit{ex post}}}{\partial h}>0\). This diagram illustrates areas of the state space where the controls are applied differently, with the associated dynamics as indicated by the vector fields. The saddle path, \(S^{*}(I)\), is the trajectory to the saddle point equilibrium A.Footnote 4 This path involves \(h(S,I) > 0\) along \(S^{*}(I)\) except at the intersection of \(S^{*}(I)\) and \({\hat{S}}\left( I \right) \) where \(h(S,I) = 0\). For initial conditions below \(S^{*}(I)\) and to the right of \({\hat{S}}\left( I \right) \), \(\frac{\partial H^{ex post}}{\partial h}<0\) and so \(h = 0\) is optimal in this region.Footnote 5 For initial conditions above \(S^{*}(I)\) and to the right of \({\hat{S}}\left( I \right) \), \(\frac{\partial H^{\textit{ex post}}}{\partial h}>0\) and so an impulse control is optimal in this region. These MRAPs move the system to \(S^{*}(I)\) as quickly as possible along a trajectory indicated by the vectors in Fig. 1.

Feedback control diagram illustrating ex post bioeconomic multi-stability
Trajectories that move to \(S^{*}(I)\) along the curve \({\hat{S}}\left( I \right) \) yield zero net benefits. Moreover, only a sliver of the state space above \(S^{*}(I)\) and to the right of \({\hat{S}} \left( I \right) \) admit MRAPs that lead to \(S^{*}(I)\); the rest of the state space to the right of \({\hat{S}} \left( I \right) \) is devoid of MRAPs to \(S^{*}(I)\), which means that a singular solution cannot be pursued in this region. The absence of a singular solution in this region means there is no switching curve (i.e., \(\frac{\partial H^{ex post}}{\partial h}=0\) is never satisfied to the right of \({\hat{S}} \left( I \right) )\) and so \(\frac{\partial H^{\textit{ex post}}}{\partial h}\) can only take on a single sign in this region: either \(\frac{\partial H^{\textit{ex post}}}{\partial h}<0\) with \(h = 0\) or else \(\frac{\partial H^{\textit{ex post}}}{\partial h}>0\) with impulse harvests. The optimal solution in this region involves setting \(h = 0\), which yields no net benefits, as the alternative of impulse harvests would produce negative net benefits. Natural processes (reproduction, natural and disease mortality, and disease transmission) fully determine the dynamics, illustrated by the vector field that is governed by the isoclines in this region. These dynamics result in equilibrium B being a locally stable focus.
The fact that there are zero net benefits along and to the right of \({\hat{S}}\left( I \right) \) means that \({\hat{S}} \left( I \right) \) is a Skiba threshold representing indifference between two locally optimal strategies: (1) a managed endemic disease with \(h \ge 0\) along a trajectory to equilibrium point A, and (2) an unmanaged endemic disease with \(h = 0\) along trajectory to equilibrium point B. We refer to the basin of attraction for B as the undesirable or bad basin, as it yields no net benefits, and we refer to the basin of attraction for A as the desirable or good basin.
The expected present value of ex post net benefits given ex ante uncertainty about \({I^{T}}\)
The ex post results are used to analyze the ex ante problem. But there are two complications. First, although \(N^{T}\) can be predicted with certainty as the terminal value \(N(T)= N^{T}\) from the deterministic ex ante problem, there is ex ante uncertainty about \(I^{T}\) and hence \(S^{T}\), which makes \(V\left( {S^{T},I^{T}} \right) \) random. Second, calculating the expected value of \(V\left( {S^{T},I^{T}} \right) \) requires knowing the functional specification of \(V\left( {S^{T},I^{T}} \right) \), but the complexity of the problem prevents us from obtaining an analytical solution for \(V\left( {S^{T},I^{T}} \right) \) and then integrating over this relation to obtain an expected value.
In the absence of an analytical solution, we adopted a numerical approach for calculating the expected value of \(V\left( {S^{T},I^{T}} \right) \). The first step simplifies matters by recognizing that the ex ante problem focuses on the deterministic variable N, and so we use the relation \(N^{T}=S^{T}+I^{T}\) to express \(V\left( {S^{T},I^{T}} \right) \) equivalently as \(V\left( {N^{T},I^{T}} \right) \). This provides a direct link to the ex ante scenario (via \(N^{T})\) and allows us to focus on a single random variable, \(I^{T}\).
The second step simulates ex post results based on Fig. 1 to develop a data set involving \(N^{T},I^{T}\), and \(V\left( {N^{T},I^{T}} \right) \). Specifically, we vary \(N^{T}\) from 10 to 90 (which is just below the carrying capacity \(K = 100\)) by increments of five. For each value of \(N^{T}\), we then vary \(I^{T}\) by increments of two. For each pair of values lying in the region above \({\hat{S}} \left( I \right) \), we calculated \(V\left( {N^{T},I^{T}} \right) \) as the net present value of the sum of discounted net benefits from the MRAP and the value of being on the singular trajectory. That is, \(V\left( {N^{T},I^{T}} \right) =\frac{H^{\textit{expost}*}\left( {N^{S},I^{S}} \right) }{r}+MRAP^{value}\) where \(H^{\textit{expost}*}\left( {N^{S},I^{S}} \right) \) is the optimized current value Hamiltonian at the point the MRAP joins the singular approach path (at point \(\left( {N^{S},I^{S}} \right) \), which is determined by simulating the MRAP), and \(MRAP^{value}=p\left[ {S^{T}-S^{S}} \right] -c\ln \left[ {\frac{N^{T}}{N^{S}}} \right] \) (see Conrad and Clark 1987). In the region below \({\hat{S}}\left( I \right) \), \(V\left( {N^{T},I^{T}} \right) =0\) since \(h = 0\) in this region.
The third step specifies a conditional (on \(N^{T})\) probability density function, denoted by \(\phi \left( {I^{T};N^{T}} \right) \), for the random variable \(I^{T}\). Specifically, we adopt the truncated exponential distribution \(\phi \left( {I^{T};N^{T}} \right) =\frac{\lambda (N^{T})e^{-\lambda (N^{T})I^{T}}}{1-e^{-\lambda (N^{T})N^{T}}}\) where \(\lambda (N^{T})\) is a rate parameter and \(N^{T}\) is the maximum possible value of \(I^{T}\). Typically, \(\lambda \) and \(N^{T}\) are treated as fixed parameters for \(\upphi \). However, since \(N^{T}\) is endogenous in our ex ante model, with its value able to change considerably, we calibrate \(\uplambda \) to depend on \(N^{T}\) such that the expected rate of initial infection is increasing in the wildlife density (i.e., a larger value of \(I^{T}\) is expected; evidence for such a relation is provided by Gilligan and van den Bosch 2008). Note that the pdf \(\upphi \) does not depend on prevention effort. Essentially, we are assuming that once an invasion occurs (the likelihood of which is determined by a separate probability, described in the next section, that does depend on prevention efforts), the level of establishment at the time of detection, \(I^{T}\), depends solely on early interactions with the wildlife population.Footnote 6
The pdf can be used to calculate the probability that the ex post system will begin in the undesirable basin of attraction. The results are illustrated in Fig. 2a. For very small \(I^{T}\), any infection is likely to infect a significant proportion of the stock (e.g., since even one infected animal represents ten percent of the population when \(N = 10\)) and so there is a significant probability (8%) of being in the undesirable basin. This probability initially declines in \(N^{T}\) but soon increases in \(N^{T}\) as a larger \(N^{T}\) provides more opportunities for early spread (affecting our calibrated pdf \(\upphi )\). The maximum probability (twelve percent) occurs when \(N^{T}=40\). The probability then diminishes in \(N^{T}\) for \(N^{T}>40\), as the effect of \(N^{T}\) on early spread is dominated by the fact that larger stock sizes make it more economic for managers to pursue equilibrium A in the good basin. We refer to the effect of a larger \(N^{T}\) increasing the likelihood of being in a bad basin as a natural hazard, and the effect of a larger \(N^{T}\) reducing the likelihood of being in the bad basin of attraction as natural insurance.

a Probability that an invasion places the system in the undesirable basin of attraction. b Simulated versus estimated values of \(W\left( {{N^T}} \right) \)
Given the pdf \(\upphi \) for uncertain \(I^{T}\) in the ex post interval, the ex ante expected net benefits associated with \(N^{T}\) are given by
A rectangular interpolation was used to generate a numerical approximation of \(W\left( {N^{T}} \right) \) for each \(N^{T}\). Finally, the numerical approximations were used to estimate the relation \(W\left( {N^{T}} \right) =38.2N^{T}-1.15\left( {N^{T}} \right) ^{2}+0.017\left( {N^{T}} \right) ^{3}-0.000079\left( {N^{T}} \right) ^{4}\) using OLS (model F-statistic=4768 [p value=0]; each estimated coefficient is significantly different than zero with p values of 0), This specification assumes \(W\left( 0 \right) =0\), as there is no economic activity when there is no resource to harvest. The interpolated and estimated values are shown in Fig. 2b illustrating the goodness of fit and also that \(W\left( {N^{T}} \right) \) is not globally concave, Finnoff et al. (2016) discuss the potential for a non-concave \(W\left( {N^{T}} \right) \), but they employ a hypothetical functional form rather than specifying and solving an explicit ex post problem as we have done here.
3 The ex ante Economic Problem
Having characterized ex post management and the expected value of this management, we now discuss pre-invasion management for the interval \(t<T\). Note that \(I=0\) during this interval, leaving N as the only state variable. We treat uncertainty about introduction as uncertainty on the invasion date T (e.g., Reed and Heras 1992), with the likelihood of introduction dependent upon wildlife density N and on prevention effort z. Specifically, let the probability the pathogen is introduced at any time t be given by rate \(\psi \left( {N,z} \right) =\mathop {\lim }\limits _{{\Delta }t\rightarrow 0} \left\{ {\frac{\left. { Pr\left( {\textit{Pathogen invasion in} \left( {t,t+\Delta }{t} \right) } \right) } \right| \textit{no invasion at t}}{{\Delta }{t}}} \right\} \). Prevention efforts include measures to prevent infected livestock or pets from being imported into a region, or to prevent migration of infected wildlife into the region. Prevention effort is a flow variable, such that only current expenditures on prevention influence the probability of introduction, as might be observed with a visual inspection program. We assume \(\psi _z \left( {N,z} \right) <0\) and \(\psi _{zz} \left( {N,z} \right) >0\), with \(\psi _z \left( {N,0} \right) =-\infty \) and \(\psi _z \left( {N,\infty } \right) =0\), such that diminishing returns to prevention exist. Greater wildlife densities are assumed to lead to a greater chance of pathogen invasion, \(\psi _N \left( {N,z} \right) >0\) (and also that \(\psi _{NN} \left( {N,z} \right) \le 0)\) since there are more opportunities for one or more herd members to become infected by an outside source.Footnote 7 This means a larger wildlife stock naturally promotes an invasion, weakening prevention; alternatively, a smaller N provides a form of natural prevention. This assumption is in contrast to the natural prevention conveyed by a more abundant native species in Finnoff et al.’s (2016) analysis. The probability the system evades introduction to time t is given by the survivor function
where \(y\left( t \right) =\mathop \int \nolimits _0^t \psi \left( {N\left( v \right) ,z\left( v \right) } \right) dv={\Psi }\left( {N\left( t \right) ,z\left( t \right) } \right) \) is the integrated hazard and \(y(0) = 0\), so that \(e^{-y\left( 0 \right) }=1\).
The combination of \(\psi \left( {N,z} \right) \) and \(\phi \left( N \right) \) make this a compound probability problem: one can manage prevention to reduce the chance of pathogen invasion, and one can manage the ex ante stock to influence both the chance of invasion and the chance of being in the good ex post basin of attraction should an invasion occur. Notice the ex ante and ex post tradeoffs involving N: a larger N makes invasion more likely, but may also increase the likelihood of moving into the good basin of attraction in the invaded system.
As all animals are healthy in the ex ante period \(t<T\), the net benefits of harvesting are given by phN – ch. Additionally, there is a cost associated with prevention effort. We define the units of prevention effort in dollars such that z is the expenditure on prevention. Net benefits in each period of the ex ante interval are given by \({ phN} { - ch} - z\). Note that in the absence of prevention, \(N^{\pi =0}=c/p \) is the zero profit threshold.
Denoting E as the expectations operator over the uncertain date T, optimal management decisions in the ex ante period are defined as the solution to:
subject to N(0), \(0\le h\le h^{max}\), \(z \quad \ge 0\), and the pre-invasion equation of motion
We employ the same growth function as in the ex post case, except note that \({\textit{S = N ex ante}}\).
We can rewrite problem (6) (e.g., Reed and Heras 1992; Horan and Fenichel 2007; Finnoff et al. 2016) as a deterministic, infinite horizon control problem in which \(SNB=\mathop \int \nolimits _0^\infty \left[ {phN-ch-z} \right] e^{-rt-y}dt\) is optimized subject to N(0), the control constraints, the equation of motion (8), the evolution of the integrated hazard \({\dot{y}} = \psi \left( {N,z} \right) \), and \(y(0)=0\). The deterministic problem involves an infinite time horizon since an invasion may never occur, but also utilizes a risk-adjusted discount factor to reflect the possibility of invasion. More details on the optimization problem, including its interpretation and manipulations, are detailed in Finnoff et al. (2016); here we only note the important details.
The conditional, current-value Hamiltonian (referred to as the Hamiltonian) is defined as
where \(\uplambda > 0\) is the co-state for N and \(\uprho \) is the co-state associated with \(-y\). The Lagrangian associated with (8) and the control constraints is
where \(\mu ^{\textit{h min}},\mu ^{\textit{h max}},\mu ^{z min}\ge 0\) are the Lagrangian multipliers associated with the constraints \(h \ge 0\), \(h\le h^{max}\), and \(z \ge 0\) respectively.
The non-convexities of the ex post problem (i.e., of \(W\left( N \right) )\) bleed through and affect the concavity of H, which also critically depends on the relationship between z and N on the hazard rate \(\psi \left( {N,z} \right) \), potentially compounded by changes in sign of the term \(\uprho -W\) (Finnoff et al. 2016). The implications are that both ex post non-convexities and the uncertainties associated with the pathogen invasion may separately or jointly create ex ante non-convexities that generate multiple optimality candidates.
3.1 Optimality Conditions
The adjoint conditions for N and y are:Footnote 8
Condition (10) is presented below in detail. Adjoint condition (11) has solution \(\rho \left( t \right) =\mathop \int \nolimits _t^\infty \left[ {phN-ch-z+\psi \left( {N,z} \right) W\left( N \right) } \right] e^{-r\left( {s-t} \right) -y}ds\), which is the expected present value of net benefits from the current time onwards, or the ex ante value of an optimally managed system facing the threat of invasion. Given this result, we can interpret \(\upgamma \equiv \uprho - W\) as the net economic cost of transitioning to the ex post outcome.
The optimality conditions related to harvesting are omitted as the only difference from the corresponding ex post condition is that the user cost now involves a single term, \(\uplambda {N}\) (since there is no disease). Instead, we focus our attention on prevention. The optimality condition for prevention is
An interior solution can only arise when \(\upgamma > 0\) such that transitioning to the ex post outcome is costly: there is value associated with trying to help the natural system prevent an invasion. The first order condition in this case requires investing in prevention to balance the marginal cost of prevention with the expected marginal reduction in losses. A corner solution with \(z = 0\) is optimal if \(\gamma \le 0\) such that there is value to letting the invasion occur.
Examining when \(\upgamma > 0\) or \(\upgamma \le 0\) begins by considering the case where \(z > 0\). Then condition (12) implies \(\gamma \left( {N,z} \right) =-\frac{1}{\psi _z \left( {N,z} \right) }>0\). The optimal value of z depends on whether the solution for h is singular or non-singular. When h is singular, Finnoff et al. (2016) show how the optimality conditions can be used to derive \(\rho =\frac{\left( {pN-c} \right) g\left( N \right) -z+\psi \left( {N,z} \right) W\left( N \right) }{r+\psi \left( {N,z} \right) }\), which can be rearranged into the following risk-adjusted “transversality condition” that balances ex ante and ex post net benefits to determine the likelihood of T:
Specifically, condition (13) balances sustainable ex ante net benefits from harvesting, less prevention costs and the risk-adjusted capital losses from invasion, with the expected flow value accruing after the invasion. If investing in prevention is optimal, then both z and \(\upgamma \) are positive and the sustainable ex ante net benefits from harvesting outweigh the expected dividends ex post, \(({ pN} - c)g(N) > { rW}(N)\). Some of the difference between \(({ pN} - c)g(N)\) and \({ rW}(N)\) is reflected by the ex ante risk-adjusted capitalized losses, \(\left[ {r+\psi \left( {N,z} \right) } \right] \gamma \left( {N,z} \right) \). The residual is optimally invested in prevention. Condition (13) indicates the optimal investment level can be written as a feedback rule, which we denote z(N). When \(z(N) > 0\), society prefers actively managing to stay in the non-invaded status quo with risk of invasion, relative to transitioning to a post-invasion outcome. Indifference occurs when \(({ pN} - c)g(N) = { rW}(N)\), so that \(z(N) = 0\) and \(\upgamma (N)=-1/\uppsi _z (N,0)\rightarrow 0\). A singular solution for h in which \(z = 0\) is optimal with \(\mu ^{\textit{z min}}>0\) and \(\upgamma (N) < 0\) is also possible. Condition (13) implies this case will result when \(({ pN} - c)g(N) < { rW}(N)\). Figure 2 illustrates the relation \(({ pN} - c)g(N) = { rW}(N)\) has two roots, \({\tilde{N}}^{H}\) and \({\tilde{N}}^{L}\), defined by \(z(N)=\upgamma (N) = 0\). In particular, \(\upgamma \), \(z > 0\) for \(N \in ({\tilde{N}}^{L}\), \({\tilde{N}}^{H})\), whereas \(\upgamma < 0\) and \(z = 0\) for \(N \in [{\tilde{N}}^{H}, K]\) (or for \(N \in [N^{\pi =0}\), \({\tilde{N}}^{L}\)], although this case is less relevant in our numerical example).
To understand the relation between \(\upgamma \), z and N, recall the wildlife stock’s opposing effects in the vicinity of \(\tilde{{N}}^{H}\): a larger Nweakens prevention but provides natural insurance that increases the likelihood of being in the good basin of attraction ex post. Note that sufficient investments in natural insurance come at a cost of reduced sustainable harvests, \(\hbox {g}(N)\), due to \(\hbox {g}^\prime (N) < 0\) for values of \(N > K/2\), which is the maximum sustainable yield level (see Fig. 3). Outcomes with \(\gamma > 0\) are consistent with a small (or perhaps negative) investment in natural insurance: there is a preference to maintain a relatively large flow of sustainable ex ante harvest benefits, \(({ pN} - c)g(N)\), in spite of the fact that the lack of natural insurance in this case increases the chance of moving to the bad basin of attraction ex post, resulting in a relatively small ex post flow of benefits, \({ rW}(N)\). In this case, there is value in prevention to reduce the likelihood of invasion. Some of this prevention already occurs as natural prevention arising from a less dense population N, but there is additional value from further investments in z.

Singular solutions for \(\upgamma (N)\)
Outcomes with \(\upgamma < 0\) are consistent with a larger investment in natural insurance: there is a preference for insuring against moving to the bad basin of attraction ex post, resulting in a relatively large ex post flow of benefits, \({ rW}(N)\), in spite of the fact that natural insurance reduces the flow of sustainable ex ante harvest benefits, (pN – c)g(N). The relatively large wildlife stock levels in this case means invasion will be likely without significant, costly investments in prevention. However, the significant amount of insurance being conveyed in this case means that further investments in prevention are not worthwhile: society is willing to forego doing anything more to prevent the invasion (\(z = 0\)) since enough costs have already been incurred to make the ex post outcome relatively safe. This result differs markedly from Finnoff et al. (2016). They found \(\upgamma < 0\) might arise when a native species is at sufficient densities to act as a predator for the invader, so that the invader provides a valued ecosystem service to the native species.
More insight into the tradeoffs between prevention and insurance is obtained by examining the condition defining the singular solution for h. In a singular outcome, the necessary condition for h, \(\uplambda =p - c/N\), can be time differentiated and set equal to \({\dot{\lambda }}\) from adjoint condition (10) to obtain the following modified golden rule for resource management, which determines the singular value(s) of N:
Condition (14) equates the required rate of return, r, to the own rate of return to conserving the wildlife stock (the right hand side [RHS], with all economic values normalized by the marginal value of wildlife). The first RHS quantity in brackets comprises two terms: the marginal growth of the wildlife stock plus the marginal cost savings from conservation. These terms represent the own rate of return in standard resource models without disease risks (Clark 2005), and so we denote \(R^{RF}\left( N \right) \) as the risk-free own rate of return. In standard resource models, the golden rule condition \(r=R^{RF}\left( N \right) \) determines the risk-free singular solution for N, which we denote here as \(N^{RF}\).
The second RHS quantity in brackets, denoted \(R^{R}\left( N \right) \), represents the own rate of return due to the effect of conservation on managing invasion risks. The first term in \(R^{R}\left( N \right) \), \( -\psi _N \left( {N,z\left( N \right) } \right) \gamma \left( {N,z} \right) <0\), reflects the cost of increasing the chance the ecosystem transitions. Specifically, this term is the (normalized) marginal effect of N on increasing expected losses, holding \(\gamma \) fixed. Since \(\psi _N >0\), a more abundant managed stock increases invasion risks, reducing \(R^{R}\left( N \right) \). This is opposite the effect described by Finnoff et al. (2016), implying a smaller N is more likely in the present case, other things equal.
The second term in \(R^{R}\left( N \right) \) reflects natural insurance: the ability of the stock to lower the expected losses that occur if the ecosystem becomes invaded. These losses arise here as potential risks of reduced natural capital values at the date of invasion. If the invasion date T was deterministic, then N(T) would be chosen to satisfy the standard transversality condition for N, \(\lambda \left( T \right) =pN^{T}-c=W_N \left( {N^{T}} \right) \). This condition is unlikely to be satisfied, however, when the invasion date T is random; the values \(pN^{T}-c\) and \(W_N \left( {N^{T}} \right) \) will likely deviate at each possible date for T. The expected difference, \(\psi \left( N \right) [W_N \left( N \right) -\left( {pN-c} \right) ]\), is the expected marginal capital gain or loss from invasion. An efficiency gain occurs if \(W_N \left( N \right) >pN-c\) when T occurs, increasing the return to N. The opposite occurs if \(W_N \left( N \right) <pN-c\) at T. This means the net effect of conservation on expected losses depends on ex post impacts relative to ex ante impacts. The net effect is more likely to be positive when a larger N provides substantial natural insurance at the margin. This result is analogous to that of Finnoff et al. (2016).
Manipulating condition (14) to
provides more intuition into the conservation of N. The condition balances the return from managing disease risk (RHS) with the required return r net of the generated risk-free return (the left hand side [LHS], the required net return to managing disease risk). If reduced conservation protects against both risks or if the effect on prevention dominates, then both sides of (15) are negative and the singular value of N is likely smaller than the risk-free value \(N^{RF}\) given standard assumptions about the terms in \(R^{RF}\left( N \right) \). The opposite may occur if the natural insurance effect of conservation dominates.
We illustrate the ex ante model by extending the ex post numerical example to include our estimated W(N) and a hazard function that follows our assumptions, \(\uppsi (N,z) = 0.15 + 0.01N - 0.07z^{0.5}\). Increases in N are risky, and so a reduction in N conveys protection in a relative sense. In contrast, z conveys prevention in an absolute sense. Figure 4 plots the LHS and RHS relations from condition 15) numerically. Curve \(r-R^{RF}\left( N \right) \) is monotonically increasing and concave, with the risk-free singular stock level occurring where \(r-R^{RF}\left( N \right) =0\), at the point \(N^{RF}\). Curve \(R^{R}\left( N \right) \) reflects the non-singular solution \(z = 0\) in the intervals [\(N^{\pi =0}\), \({\tilde{N}}^{L}\)] and [\({\tilde{N}}^{H}\), K] (dot-dashed line) and the singular solution \(z(N) > 0\) in the interval [\({\tilde{N}}^{L},{\tilde{N}}^{H}\)]. The non-monotonic curve \(R^{R}\left( N \right) \) intersects the \(r-R^{RF}\left( N \right) \) curve three times to produce singular values of N, denoted \(N^{C*},N^{D*}\), and \(N^{E*}\). These multiple equilibria arise from ex ante non-convexities introduced by ex post non-convexities mixed with the uncertainty of invasion. In particular, they stem from the competing risk-protection effects of conservation at different wildlife densities.

Multiple equilibria for N with and without prevention. Thick arrows indicate direction of movement of N, dashed when \(z(N)=0\) and solid when \(z(N)>0\)
Equilibria \(N^{C*}\) and \(N^{E*}\) are locally stable. This is because \(R^{R}\left( N \right) >r-R^{RF}\left( N \right) \) to the left of \(N^{C*}\) and \(N^{E*}\), so that the return to managing disease risk exceeds the required net return to managing disease risk, whereas the opposite is true to the right of \(N^{C*}\) and \(N^{E*}\). As \(N^{C*}\) is unchanging over time, the singular harvest rate associated with this equilibrium is given by the stationary harvest level \(h^{C*}N^{C*}=g\left( {N^{C*}} \right) \). The values of \(z\left( {N^{C*}} \right) \), \(\rho \left( {N^{C*}} \right) \), and \(\gamma \left( {N^{C*}} \right) \) are also constant in the singular outcome. Analogous results arise for equilibrium \(N^{E*}\).
Consider the smallest singular value, \(N^{C*}\). At this value, the conservation-related return to disease control is negative, i.e., \( R^{R}\left( N \right) <0\). This is because the population is too small to support large ex post capital values relative to ex ante values, i.e., \(({ pN - c}) > W_{N}(N)\), in part due to the risk of landing in the undesirable basin of attraction ex post being at its peak (see Fig. 2b). The golden rule then requires the risk-free return to conservation to exceed the discount rate such that the required return to disease control is negative, \(r-R^{RF}\left( N \right) <0\). The result is a small singular wildlife stock \(N^{C*}\) relative to the risk-free level \(N^{RF}\), which is the opposite of Finnoff et al.’s (2016) result due to the opposite effect of N on prevention in the current setting.
While the risk of invasion is smaller at \(N^{C*}\) than at values of \(N > N^{C*}\), any invasion that does occur at \(N^{C*}\) is more likely to lead to an ex post outcome in the undesirable basin of attraction for equilibrium B in Fig. 1: expected losses \(\uppsi \upgamma \) would be large at \(N^{C*}\) absent investments in prevention. Figure 5a indicates the optimal response is to invest heavily in prevention, such that z(N) is essentially maximized at \(N^{C*}\) and \(\uppsi (N,z(N))\) is essentially minimized at this point (Fig. 5b). This is in spite of the fact that the reduction in N relative to the risk-free value already conveys some level of prevention. Together, these complementary investments make \(\psi \left( {N^{C*},z\left( {N^{C*}} \right) } \right) \) small such that invasion is unlikely at \(N^{C*}\) relative to higher stock levels. Finnoff et al. (2016) also find that \(\uppsi \) is minimized in the neighborhood of the small-stock equilibrium, although in their model large investments in anthropogenic prevention substituted for a relative lack of natural prevention at this equilibrium. These results mean tradeoffs involving the two types of risks—invasion risks and the risk of alighting in the undesirable basin of attraction—and the two types of natural protection against these risks, can play an important role in the allocation of anthropogenic and natural investments.

a Prevention \(\hbox {z}(N)\) in the singular solutions, dashed when \(z(N)=0\) and solid when \(z(N)>0\). b Endogenous Hazard \(\varPsi (N,z(N))\) in the singular solutions, dashed when \(z(N)=0\) and solid when \(z(N)>0\)
Now consider the largest singular value, \(N^{E*}\). The return to disease control, \(R^{R}\left( N \right) >0\), is positive at this value due to a larger wildlife population protecting against capital losses, i.e., \(W_{N}(N) \quad>\) (pN – c). The golden rule then requires the risk-free return to conservation to be positive, \(r-R^{RF}\left( N \right) >0\), and the singular wildlife stock \(N^{E*}\) exceeds \(N^{RF}\). While the risk of invasion is larger at \(N^{E*}\) than at values of \(N < N^{E*}\), any invasion that does occur at \(N^{E*}\) is more likely to lead to an ex post outcome in the desirable basin of attraction for equilibrium A in Fig. 1. Expected losses \(\uppsi \upgamma \) would be small at \(N^{E*}\) due to a small \(\gamma \left( {N^{E*}} \right) \), and so it is optimal to invest in no prevention (Fig. 5). The result is that \(\uppsi (N,(N)=0)\) is large enough at this point (Fig. 5b) so that an invasion is quite likely.
The final equilibrium to consider is \(N^{D*}\). This equilibrium is unstable since \(r-R^{RF}\left( N \right) \) cuts \(R^{R}\left( N \right) \) from below. This instability suggests that equilibrium \(N^{C*}\) should be pursued along a MRAP for values of N(0) \(< N^{S*}\) and that equilibrium or \(N^{E*}\) should be pursued along a MRAP for values of \(N(0) > N^{S*}\), where \(N^{S*}\) is a Skiba point in the neighborhood of the unstable equilibrium \(N^{D*}\) (Spence and Starrett 1975). For simplicity, we constructed Fig. 4 as if equilibrium \(N^{D*}\) is the Skiba point, with arrows representing the MRAPs that should be followed for initial values of N not at a singular outcome. The true Skiba point will depend on the value of \(h^{max}\) (Spence and Starrett 1975).
4 Conclusion
Managing the risks of wildlife diseases/pathogens involve investments in both prevention (ex ante) and control (ex post). This reality implies that the transition from the pre-disease state to the post-disease state is endogenous—the manager balances his or her investments in prevention and control such that the initial conditions that define the post-disease world are endogenous. Yet most economic models exploring how to manage wildlife risks take these initial conditions as exogenous, which implies that the pathogen invasion is unanticipated. This is a restrictive approach given managers have ex ante options to control the odds of invasion. Herein we explore how ex ante management affects the ex post initial conditions and the subsequentex post optimal outcome.
Following Finnoff et al. (2016), we extend Reed and Heras’s (1992) Poisson “collapse” model to allow for endogenous risk associated with the initial conditions and ex post multi-stability. In doing so, we capture two uncertain processes: introduction and establishment of the pathogen (with establishment defined by a random infection level that serves as the initial condition for the invaded system). Both random processes are conditional on how the native population is managed, making these random impacts endogenous to economic decisions. As with Finnoff et al. (2016), we find the combination of invasion risks and ex post multi-stability can produce ex ante multi-stability.
In contrast to Finnoff et al. (2016), who model wildlife conservation as an investment in both natural prevention (reducing the likelihood of invasion) and natural insurance (reducing the economic consequences of an invasion), our problem is more nuanced because wildlife conservation as an investment in natural insurance but a divestment in natural prevention. These opposing effects of conservation have potentially important implications for the allocation of natural versus anthropogenic prevention. For instance, one equilibrium stock is lower than risk-free value, in contrast to Finnoff et al. (2016), because the smaller stock conveys natural prevention relative to larger stocks (i.e., the degree to which the stock facilitates invasion is reduced). This effect might suggest less of a need for anthropogenic investments in prevention. However, at this equilibrium the probability of alighting in the undesirable basin of attraction ex post is at a high due to the small stock. This latter effect increases the incentives to make additional anthropogenic investments in prevention, such that these are maximized at this equilibrium. These results, which stems from tradeoffs involving natural protection and natural insurance, suggest a complementary relation between natural and anthropogenic prevention and contrast with Finnoff et al.’s (2016) results that natural and anthropogenic prevention exhibit a substitute relation. This means tradeoffs involving the two types of risks, and the two types of natural protection against these risks, can play an important role in the allocation of investments.
Notes
The focus of wildlife diseases has largely been on impacts to human and livestock health (e.g., Cleaveland et al. 2001; Daszak et al. 2000; USDA-APHIS 2002; The Royal Society 2002), as most infectious diseases affecting people and domestic animals originate in wildlife (Cleaveland et al. 2001)—including recent high-profile disease outbreaks such as Ebola, coronaviruses (e.g., MERS, SARS), prion diseases (bovine spongiform encephalopathy (BSE) and variant Creutzfeldt-Jacob disease), avian influenza, bovine tuberculosis (bTB), and West Nile Virus. Infectious diseases affect how ecological communities are structured and are a significant factor in biodiversity declines (Hatcher et al. 2006; Smith et al. 2009a, b; MEA 2005), one of the greatest environmental risks facing society (MEA 2005; Tschirhart 2009). It is predicted that pathogen introductions may soon achieve a status similar to invasive species, the second most important cause of extinction (Daszak et al. 2000).
Understanding how preventive choices (e.g., vaccination or population controls) might reduce the basic reproduction ratio of pathogens (known as \(R_{0}\)) below unity to prevent invasions has been a major emphasis of the epidemiology literature (e.g., Roberts and Heesterbeek 2007).
We use the term multi-stability to refer to bioeconomic multi-stability rather than the notion of ecological multi-stability, which does not model human behavioral feedback responses.
The vector field near equilibrium A appears to contradict our assertion that A is a saddle point. However, this apparent discrepancy is explained by recalling that Fig. 1 is a feedback control diagram and not a standard phase plane. In a sense, the feedback control diagram splices together phase planes associated with the various types of solutions. The singular solution, which includes point A, is only followed along the saddle path \(S^{*}(I)\) and so this is the only portion of the singular solution’s phase plane that is depicted in Fig. 1. A MRAP is pursued for state combinations lying off \(S^{*}(I)\) and to the left of \({\hat{S}}{(I)}\); here, the vector fields stem from the phase planes associated with \(h = 0\) (below \(S^{*}(I))\) and impulse controls (above \(S^{*}(I))\). We do not depict the isoclines in this region in order to reduce clutter and to minimize potential confusion. However, the isoclines associated with \(h = 0\) would simply be extensions of the isoclines depicted to the right of \({\hat{S}}{(I)}\).
Initial conditions refer to some initial combination of \(S^{T}\) and \(I^{T}\) in the state space. Combinations of \(S^{T}\) and \(I^{T}\) along any line with slope of negative one are associated with a particular \(N^{T}\), due to the fact that \(I^{T}=N^{T} - S^{T}\). That is, the isocline associated with a particular value of \(N^{T}\) is given by a line that connects the point \(S^{T}=N^{T}\) on the vertical axis with the point \(I^{T}=N^{T}\) on the horizontal axis.
Our model assumes the dates of introduction and detection are the same. However, we calibrate \(\upphi \) by temporarily relaxing this assumption so that we may link the pdf \(\upphi \) to initial infection dynamics. Let \({I_0}\) be the initial introduction such that \({I^T} \approx {I^0} + {\dot{I}}{{\Delta }}t\), where \({{\Delta }}t\) is a delay in detection. Define \(Q\left( {{N^T}} \right) = \frac{{\dot{I}}}{{{I^0}}} = \left( {\beta - \frac{\alpha }{k}} \right) {N^T} + \left( {\alpha - \delta } \right) \), which is always positive given our parameter values. Then we approximate \({I^T}\) as \({I^T} \approx {I^0}\left( {1 + Q\left( {{N^T}} \right) {{\Delta }}t} \right) \approx {I^0}Q\left( {{N^T}} \right) {{\Delta }}t\) if \(Q\left( {{N^T}} \right) {{\Delta }}t \gg 1\). The term \(Q({N^T})\) is determined by the model parameters and the given value of c. We set \({I^0}{{\Delta }}t = 80\), which implies 14 animals become infected when \(N = 50\). We calibrate \(\lambda \left( {{N^T}} \right) \) so that this result lies in the upper tail of the distribution and that most of the probability mass lies below this value (which seems more reasonable). Specifically, \(\lambda \left( {{N^T}} \right) \) is chosen such that \({I^0}Q\left( {{N^T}} \right) {{\Delta }}t = \frac{1}{{\lambda \left( {{N^T}} \right) \left( {1 - {e^{ - \lambda \left( {{N^T}} \right) {N^T}}}} \right) }}\), which exceeds the mean of the truncated exponential distribution.
Basic epidemiological theory indicates that pathogens can only invade a system if the basic reproduction ratio of the pathogen, \(R_{0}\), exceeds one, and that \(R_{0}\) is increasing in host density when transmission exhibits some degree of density-dependence (Anderson and May 1986). Empirical studies find that increased density either increases disease risks in wildlife or else has no effect. Wildlife problems where disease risks likely increase with density include bovine tuberculosis in New Zealand brushtailed possums (Caley et al. 1999) and Michigan white-tailed deer (Hickling 2002; O’Brien et al. 2002), brucellosis in Yellowstone area elk (Cross et al. 2013), cowpox in voles (Smith et al. 2009a, b), and chronic wasting in Wisconsin white-tailed deer (Joly et al. 2006).
The adjoint condition for y is based on the results of Reed and Heras (1992).
References
Anderson RM, May RM (1986) The invasion, persistence and spread of infectious diseases within animal and plant communities. Philos Trans R Soc Lond B 314:533–570
Brock WA, Starrett D (2003) Managing systems with non-convex positive feedback. Environ Resour Econ 26:575–602
Caley P, Hickling GJ, Cowan PE, Pfeiffer DU (1999) Effects of sustained control of brushtail possums on levels of Mycobacterium bovis infection in cattle and brushtail possum populations from Hohotaka, New Zealand. N Z Vet J 47:133–142
Case TJ (1990) Invasion resistance arises in strongly interacting species-rich model competition communities. Proc Natl Acad Sci USA 87:9610–9614
Centers for Disease Control and Prevention (CDC) (2011) A CDC framework for preventing infectious diseases: sustaining the essentials and innovating for the future. Centers for Disease Control and Prevention, Atlanta
Chakraborty S, Papageorgiou C, Sebastián FP (2010) Diseases, infection dynamics, and development. J Monet Econ 57:859–872
Chen F, Jiang M, Rabidoux S, Robinson S (2011) Public avoidance and epidemics: insights from an economic model. J Theor Biol 278:107–119
Clark CW (2005) Mathematical bioeconomics: the optimal management of renewable resources. Wiley, New York
Cleaveland S, Laurenson MK, Taylor LH (2001) Disease of humans and their domestic mammals: pathogen characteristics, host range and the risk of emergence. Philos Trans R Soc Lond, Ser B 356:991–999
Conrad J, Clark CW (1987) Natural resource economics: notes and problems. Cambridge University Press, New York
Cross PC, Creech TG, Ebinger MR, Manlove K, Irvine K, Henningsen J, Rogerson J, Scurlock BM, Creel S (2013) Female elk contacts are neither frequency nor density dependent. Ecology 94:2076–2086
Dasgupta P, Mäler K-G (2003) The economics of non-convex ecosystems: introduction. Environ Resour Econ 26:499–525
Daszak P, Cunningham AA, Hyatt AD (2000) Emerging infectious diseases of wildlife-threats to biodiversity and human health. Science 287:443–449
Daszak P, Cunningham AA, Hyatt AD (2001) Anthropogenic environmental change and the emergence of infectious diseases in wildlife. Acta Trop 78(2):103–116
Fenichel EP, Horan RD (2007a) Gender-based harvesting in wildlife disease management. Am J Agric Econ 89:904–920
Fenichel EP, Horan RD (2007b) Jointly-determined ecological thresholds and economic tradeoffs in wildlife disease management. Nat Resour Model 20:511–547
Finnoff D, Shogren JF, Horan RD, McDermott SM, Sims C (2013) Economic control of invasive species. In: Levin S (ed) Encyclopedia of biodiversity, vol 3, 2nd edn. Academic Press, Waltham, pp 16–24
Finnoff D, Horan R, Shogren JF, Reeling C, Berry K (2016) Natural vs anthropogenic risk reduction: facing invasion risks involving multi-stable outcomes. J Econ Behav Organ 132:113–123
Gilligan CA, van den Bosch F (2008) Epidemiological models for invasion and persistence of pathogens. Annu Rev Phytopathol 46:385–418
Hatcher MJ, Dick JTA, Dunn AM (2006) How parasites affect interactions between competitors and predators. Ecol Lett 9:1253–1271
Heesterbeek JAP, Roberts MG (1995) Mathematical models for microparasites of wildlife. In: Grenfell BT, Dobson AP (eds) Ecology of infectious diseases in natural populations. Cambridge University Press, New York, pp 90–122
Hickling GJ (2002) Dynamics of bovine tuberculosis in wild white-tailed deer in Michigan. Michigan Department of Natural Resources Wildlife Division Report No. 3363
Horan RD, Fenichel EP (2007) Economics and ecology of managing emerging infectious animal diseases. Am J Agric Econ 89:1232–1238
Horan RD, Melstrom RT (2011) No sympathy for the devil. J Environ Econ Manag 62:367–385
Horan RD, Wolf CA (2005) The economics of managing infectious wildlife disease. Am J Agric Econ 87:537–551
Horan RD, Fenichel EP, Drury K, Lodge DM (2011a) Managing ecological thresholds in coupled environmental-human systems. Proc Natl Acad Sci USA 108:7333–7338
Horan RD, Fenichel EP, Melstrom RT (2011b) Wildlife disease bioeconomics. Int Rev Environ Resour Econ 5:23–61
Joly DO, Samuel MD, Langenberg JA, Blanchong JA, Batha CA, Rolley RE, Keane DP, Ribic CA (2006) Spatial epidemiology of chronic wasting disease in wisconsin white-tailed deer. J Wildl Dis 42:578–588
Jones KE, Patel NG, Levy MA, Storeygard A, Balk D et al (2008) Global trends in emerging infectious diseases. Nature 451(2008):990–994
Kevin B, David F, Richard H, Shogren JF (2015) Managing the endogenous risk of disease outbreaks with a non-constant background hazard rate. J Econ Dyn Control 51:166–179
Kremer M (1996) Integrating behavioral choice into epidemiological models of AIDS. Q J Econ 111(2):549–573
Lloyd-Smith JO, Cross PC, Briggs CJ, Daugherty M, Getz WM, Latto J, Sanchez MS, Smith AB, Swei A (2005) Should we expect population thresholds for wildlife disease? Trends Ecol Evol 20(9):511–519
McCallum H, Barlow N, Hone C (2001) How should pathogen transmission be modelled? Trends Ecol Evol 16(2001):295–300
Millennium Ecosystem Assessment (MEA) (2005) Ecosystems and human well-being: biodiversity synthesis. World Resources Institute, Washington
Namba T, Takahashi S (1993) Competitive coexistence in a seasonally fluctuating environment II. Multiple stable states and invasion success. Theor Popul Biol 44:374–402
O’Brien DJ, Schmitt SM, Fierke JS, Hogle SA, Winterstein SR, Cooley TM, Moritz WE, Diegel KL, Fitzgerald SD, Berry DE, Kaneene JB (2002) Epidemiology of mycobacterium bovis in free-ranging white-tailed deer, Michigan, USA, 1995–2000. Prev Vet Med 54:47–63
Perrings C (2005) Mitigation and adaptation strategies for the control of biological invasions. Ecol Econ 52:315–325
Reed WJ, Heras HE (1992) The conservation and exploitation of vulnerable resources. Bull Math Biol 54:185–207
Smith KF, Behrens M, Schloegel LM, Marano N, Burgiel S, Daszak P (2009a) Reducing the risks of the wildlife trade. Science 324:594–595
Smith MJ, Telfer S, Kallio ER, Burthe S, Cook AR, Lambdin X, Begon M (2009b) Host-pathogen time series data in wildlife support a transmission function between density and frequency dependence. Proc Natl Acad Sci USA 106:7905–7909
Spence M, Starrett D (1975) Most rapid approach paths in accumulation problems. Int Econ Rev 16:388–403
The Economist (2005, Nov 19) The usual suspects. London, England, p 95
The Royal Society (2002) Infectious diseases in livestock: scientific questions relating to the transmission, prevention and control of epidemic outbreaks of infectious disease in livestock in Great Britain. The Royal Society, London
The World Bank (2013) Pandemic risk and one health. http://www.worldbank.org/en/topic/health/brief/pandemic-risk-one-health. Accessed 24 June 2017
Tschirhart J (2009) Integrated ecological-economic models. Annu Rev Resour Econ 1:381–407
(2002) Foot-and-mouth disease vaccine. Fact sheet. United States Department of Agriculture, Riverdale
Acknowledgements
We gratefully acknowledge funding from NSF Grant #1414374 as part of the joint NSF-NIH-USDA Ecology and Evolution of Infectious Diseases program, and by UK Biotechnology and Biological Sciences Research Council Grant BB/M008894/1. We also gratefully acknowledge funding from NOAA CSCOR Grant No. NA09NOS4780192, the National Institute of General Medical Sciences (NIGMS) at the National Institutes of Health, Grant #1R01GM100471-01, and USDA National Institute of Food and Agriculture, Grant #2011-67023-30872. The contents of the paper are solely the responsibility of the authors and do not necessarily represent the official views of NSF, NOAA CSCOR, NIGMS, or USDA.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Horan, R.D., Finnoff, D., Berry, K. et al. Managing Wildlife Faced with Pathogen Risks Involving Multi-Stable Outcomes. Environ Resource Econ 70, 713–730 (2018). https://doi.org/10.1007/s10640-018-0227-y
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10640-018-0227-y