
Abstract
Given two positive real numbers M and m and an integer \(n>1\), it is well known that we can find a family of solutions of the \((n+1)\)-body problem where one body with mass M stays at the origin and the other n bodies, all with the same mass m, move on the x–y plane following ellipses with eccentricity e. These periodic solutions were discovered by Lagrange and can be described analytically. In this paper, we prove the existence of periodic solutions of the \((n+1)\)-body problem; they are not-trivial in the sense that none of the bodies follows conics. Besides showing the existence of these periodic solutions, we point out a trivial family of non-periodic solutions for the \((n+1)\)-body problem that are easy to describe. In this way, we are considering three families of solutions of the \((n+1)\)-body problem: The Lagrange family, the family of non-periodic solution and the non-trivial solutions. The authors surprisingly discovered that a numerical solution of the 4-body problem—the one displayed on the video http://youtu.be/2Wpv6vpOxXk—is part of a family of periodic solutions (those that we are calling the non-trivial) that does not approach a solution in the Lagrange family, but it approaches a solution in the family that we are calling non-periodic solutions. After pointing this out, the authors find an exact formula for the bifurcation point in the non-periodic family and use it to show the mathematical existence of nonplanar periodic solutions of the \((n+1)\)-body problem for any pair of masses M, m and any integer \(n>1\) (the family that we are calling non-trivial). As a particular example, we find a non-trivial solution of the 4-body problem where three bodies with mass 3 moving around a body with mass 7 that moves up and down.












Similar content being viewed by others

References
Corbera, M., LLibre, J.: Families of periodic orbits for the spatial isosceles \(3\)-body problem. SIAM J. Math. Anal. 35(5), 1311–1346 (2000)
Devaney, R.: Triple collision in the planar isosceles three-body problem. Invent. Math. 60, 249–267 (1980)
Galán, J., Nuñez, D., Rivera, A.: Quantitative stability of certain periodic solutions in the Sitnikov problem. SIAM J. Appl. Dyn. Syst. 17(1), 52–77 (2018)
Hénon, H.: A family of periodic solutions of the planar three-body problem, and their stability. Celest. Mech. 13, 267–285 (1976)
Martinez, R., Simo, C.: Qualitative study of the planar isosceles three-body problem. Celest. Mech. 41, 179–251 (1987)
McGehee, R.: Triple collision in the collinear three-body problem. Invent. Math. 27, 191–227 (1974)
Meyer, K., Wang, Q.: The global phase structure of the three-dimensional isosceles three-body problem with zero energy. In: Hamiltonian Dynamical Systems (Cincinnati, OH, 1992). IMA Volumes in Mathematics and Applications, vol. 63, pp. 265–282. Springer, New York (1995)
Meyer, K., Schmidt, D.: Libration of central configurations and braided Saturn rings. Celest. Mech. Dyn. Astron. 55, 289–303 (1993)
Offin, D., Cabral, H.: Hyperbolicity for symmetric periodic orbits in the isosceles three body problem. Discrete Contin. Dyn. Syst. Ser. S 2(2), 379–392 (2009)
Ortega, R., Rivera, A.: Global bifurcation from the center of mass in the Sitnikov problem. Discrete Contin. Dyn. Syst. Ser. B. 14(2), 719–732 (2010)
Perdomo, O.: A family of solution of the n body problem (2014). arXiv:1507.01100
Perdomo, O.: A small variation of the Taylor method and periodic solution of the 3-body problem (2015). arXiv:1410.1757
Perdomo, O.: Bifurcation in the family of periodic orbits for the spatial isosceles 3 body problem. Qual. Theory Dyn. Syst. (2017). https://doi.org/10.1007/s12346-017-0244-1
Perdomo, O.: The round Taylor method. Am. Math. Mon. 126(3), 237–251 (2019). https://doi.org/10.1080/00029890.2019.1546087
Rivera, A.: Periodic solutions in the generalized Sitnikov \((N+1)\)-body problem. SIAM J. Appl. Dyn. Syst. 12(3), 1515–1540 (2013)
Suarez, J.: Sobre la existencia de soluciones periódicas en el problema de \(N\)-cuerpos poligonal. Ph.D. Thesis. Universidad del Valle, Cali-Colombia (2020)
Xia, Z.: The existence of noncollision singularities in Newtonian systems. Ann. Math. 135, 411–468 (1992)
Yan, D., Ouyang, T.: New phenomenons in the spatial isosceles three-body problem. Int. J. Bifur. Chaos Appl. Sci. Eng. 25, 9 (2015)
Acknowledgements
The author O. Perdomo has been financially supported by AAUP research grant. The author A. Rivera has been financially supported by the Capital Semilla project (2020-2021) No. 2149. The author J. Suárez has been financially supported by a grant from the Colciencias Ph.D program.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Proof of Theorem 1.1
A direct computation shows that the matrix \({\mathcal {R}}={\mathcal {R}}[2\pi /n]\) satisfies \(\displaystyle {{\mathcal {R}}^{-k}={\mathcal {R}}^{n-k}}\) for all integer k. Therefore,
with \(\mathbf{r }\in {\mathbb {R}}^3\) and each \(j\in \left\{ 1,\ldots ,n\right\} \). In consequence, if \(\mathbf{r }_{j}\), \(j=1,\ldots , n+1\) is the vector position of each body, and the fist n bodies move on the vertex of a regular polygon satisfying \(\mathbf{r }_{j}={\mathcal {R}}^{j-1}\mathbf{r }_{1}\) with \(j=2,\ldots , n\) of then the bodies satisfies the n-body problem if and only if
Therefore,
Finally, by (4.3) we obtain
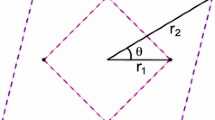
Now we study each term in (4.4). Therefore, we rewrite the vector position \(\mathbf{r }_{1}\) in cylindric coordinates
and then
where
From here it follows directly
for all \(1\le k \le n-1.\) Moreover,
for all \(j=1,\ldots ,n,\). Now, under the hypothesis that the center of masses stay put at the origin, we have the condition
in consequence, if \(\displaystyle {\mathbf{r }_{n+1}(t)=(x_{n+1}(t),y_{n+1}(t),f(t))}\) the previous equation implies
since \(\displaystyle {\sum ^{n}_{j=1}c_{j-1}=\sum ^{n}_{j=1}s_{j-1}=0}\) it follows that:
In consequence,
with \(\displaystyle {\gamma =\frac{M+nm}{nm}}\) and for all \(j=1,\ldots n.\) To sum up, the previous computations show that
Finally, (4.4) in cylindric coordinates is given by
From the fact
it follows directly
Analogously,
Therefore, (4.6) is equivalent to the system of equations
with
and C the constant angular momentum, implying
The initial conditions
we obtain \(C=r_{0}a\), and this completes the proof. \(\square \)
Rights and permissions
About this article

Cite this article
Perdomo, O., Rivera, A. & Suárez, J. Bifurcation of periodic orbits for the N-body problem, from a nongeometrical family of solutions. Celest Mech Dyn Astr 134, 8 (2022). https://doi.org/10.1007/s10569-022-10062-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10569-022-10062-y