
Abstract
Ground-motion models (GMMs) are frequently used in engineering seismology to estimate ground motion intensities. The majority of GMMs predict the response spectral ordinates (such as spectral acceleration) of a single-degree-of-freedom oscillator because of their common application in engineering design practices. Response spectra show how an idealized structure reacts to applied ground motion; however, they do not necessarily represent the physics of ground motion. The functional forms of the response spectra GMMs are built around ideas taken from the Fourier spectral concept. Assuming the validity of Fourier spectral concepts in the response spectral domain could cause physically inexplainable effects. In this study, using a mixed-effects regression technique, we introduce four models capable of predicting the Fourier amplitude spectrum that investigates the impact of incorporating random-effect event and station terms and variations in using a mixed-effects regression technique in one or two steps using truncated dataset or all data (nontruncated dataset). All data consists of 2581 three-component strong ground motion data resulting from 424 events with magnitude ranging from 4.0 up to 7.4, from 1976 to 2020, and 706 stations. The truncated dataset’s records, events, and stations are reduced to 2071, 408, and 636, respectively. As part of this study, we develop GMMs to predict the Fourier amplitude spectrum for the Iranian plateau within the frequency range of 0.3–30 Hz. We adopted simple, functional forms for four models, and we included a limited number of predictors, namely Mw (moment magnitude), Rjb (Joyner–Boore distance), and VS30 (time-averaged shear-wave velocity in the top 30 m). Due to statistical analyses, the style-of-faulting term was excluded from the final functional forms. The robustness of the derived models is indicated by unbiased residual variation with predictor variables.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Ground-motion models (GMMs), also referred to as attenuation relationships or ground-motion prediction equations (GMPEs), are an important part of any seismic hazard analysis (SHA) studies. Seismic hazard estimates are greatly influenced by GMMs (Ghofrani and Atkinson 2013). GMMs, which represent the median and variability (standard deviation) of ground motion, are widely utilized in various applications, including seismic design codes and standards, seismic-hazard maps, earthquake loss, and risk modeling, site-specific seismic-hazard evaluations for critical facilities, and a range of research activities (Douglas and Edwards 2016). Because of their largely empirical nature, the validity and reliability of GMMs depend heavily on the quality and completeness of the available datasets (e.g., Zhao and Lu 2011). GMMs can be developed using recorded ground motions, numerical earthquake simulations, or a combination of both approaches (Bayless and Abrahamson 2019b). Empirical ground-motion datasets have been utilized for the study presented herein.
GMMs can predict a range of ground-motion intensity measures (GMIMs), for example, peak ground acceleration (PGA), peak ground velocity (PGV), spectral accelerations (SA), Fourier amplitude spectra (FAS), duration (i.e., D5-75 and D5-95), cumulative absolute velocity (CAV), and Arias intensity (IA) (Maiti et al. 2021). The resulting GMM is source-, site-, or path-specific with reduced aleatory variability at the expense of a more complex model. We can see a connection between uncertainty in GMMs and hazards (Baltay et al. 2017). Ground motion distribution is represented by GMMs using a median and aleatory variability (a standard deviation) (Strasser et al. 2009). The outcomes of probabilistic seismic hazard analysis (PSHA), especially low-probability ground motions, can be significantly affected by the standard deviation (Bommer and Abrahamson 2006).
Most GMMs employed in engineering applications are based on response spectral representation (Douglas 2020). These GMMs are frequently utilized to estimate the random distribution of ground motion with respect to SA. In contrast, there has been limited development of GMMs for FAS prediction (Trifunac 1976; McGuire 1978; Atkinson and Mereu 1992; Sokolov et al. 2000; Stafford 2006; Stafford et al. 2006; Bora et al. 2014, 2015, 2019; Bayless and Abrahamson 2019a; Kotha et al. 2022; Maiti et al. 2021). According to Douglas (2020), there are 468 GMMs for PGA prediction, 302 GMMs for SA prediction, and only a handful of GMMs for the prediction of FAS.
Response spectra describes how an idealized structure responds to ground motion input, but they do not account for the physical characteristics of the actual ground motion. GMMs developed based on spectral acceleration (GMM-SA) are obtained by directly regressing on the response spectral ordinates, which more closely reflects the eventual structural response. GMM-SAs are highly useful for engineering applications since they estimate the response of idealized single-degree-of-freedom (SDOF) structures to input ground motion. Nevertheless, SA(T) incorporates features of Fourier amplitudes across a broad frequency or period range (Bora et al. 2016), and therefore, it may not accurately reflect the actual ground motion. Hence, GMMs that can predict the actual ground motion FAS(f) might be a valuable substitute for GMM-SAs (Bora et al. 2014).
The Fourier spectral representation is a linear process that is calculated by multiplying the various seismological characteristics of the ground motion (Bora et al. 2016). On the contrary, every point on the response spectrum results from a nonlinear process influenced by the entire frequency content (Boore 2003). The FAS has several advantages, especially for adjusting GMMs for different seismological properties and combining empirical data with simulation results. Atkinson and Mereu (1992), Sokolov et al. (2000), Stafford et al. (2006), Bora et al. (2014, 2015, 2019), and Bayless and Abrahamson (2019b) are examples of GMMs developed based on FAS (GMM-FAS). Bora et al. (2014) proposed an approach that involves developing a model for FAS and one for the duration. They converted FAS and duration models to response spectral ordinates (for engineering applications), utilizing the random vibration theory (RVT) framework as described by Boore (2003).
As per Bayless and Abrahamson (2019b), there are numerous advantages of using GMM-FAS instead of GMM-SA: (1) it is simpler to confine the behavior of a GMM-FAS by utilizing seismological theories and models like Brune (1970) and Boore et al. (2014a); (2) the linearity of site-response remains consistent across all frequencies and does not rely on the spectral composition of input motions, a characteristic not shared by response spectra (Bora et al. 2016; Stafford et al. 2017); (3) the adjustment of input parameters and techniques for finite-fault Fourier spectra is more closely linked to the physics of simulations than the utilization of GMM-SAs; and (4) stochastic simulation of practical ground motions can be facilitated by inter-frequency correlation of FAS(f), generated from residuals of a GMM-FAS (Stafford et al. 2017; Bayless and Abrahamson 2019a). Moreover, by employing the RVT framework, one can easily produce SA(T) from a GMM-FAS (Bora et al. 2016; Kotha et al. 2022). The Fourier spectrum is important in accommodating variations in regional seismological features of a GMM (Bora et al. 2014).
The Fourier domain offers a straightforward approach to analyzing the expected behavior of a specific seismological parameter on ground motion. However, FAS and SA have no direct relationship, especially at high oscillator frequencies (Bora et al. 2016). This is due to the fact that the response spectrum is the result of a nonlinear process, whereas the Fourier spectrum is viewed as a linear process concerning the transfer functions of the individual seismological properties of the ground motion, such as the source, path, and site (Bora et al. 2016; Montejo and Vidot-Vega 2017).
In recent years, several empirical (e.g., Sedaghati and Pezeshk 2017; Zafarani et al. 2018a, b; Farajpour et al. 2019) and stochastic simulation-based GMMs (e.g., Zafarani et al. 2008; Soghrat et al. 2012; Zafarani and Soghrat 2012) have developed either for the entire Iranian plateau or specific regions within it. Table 1 describes each model in detail.
In the present study, the GMMs-FAS are developed to predict an average rotation-independent FAS at 40 frequency(f) points ranging from 0.3 to 30 Hz. Using the entire time series of the provided record, the FAS of the ground motion was computed by analyzing the processed acceleration traces. Our empirical models for FAS are based on a limited set of predictor variables, namely moment magnitude (Mw), Joyner-Boore distance (Rjb), and VS30.
At our current state of knowledge, all of the variability is treated as aleatory in GMMs (Baltay et al. 2017). We can decompose residuals between empirical data and GMMs into the source, path, and site elements. These elements can be characterized in terms of repeatable (epistemic uncertainty, which is uncertainty surrounding the knowable repeatable components, reflecting a lack of knowledge in the true value of those terms and which can, in theory, be reduced) and the random (aleatory variability, which is, unpredictable contributions) components. The level of uncertainty in a GMM is decreased as a result of the identification of repeated residuals for a particular source (the excitation of ground motion by an earthquake introduced by Mw), site (amplify or attenuate ground-motion amplitudes due to local conditions represented by VS30), or path (diminution of ground-motion amplitudes as they propagate away from the source contain geometrical spreading and anelastic attenuation as a function of Rjb). Consequently, this reduction in uncertainty can result in a lower hazard level for low probabilities of exceedance (Baltay et al. 2017).
Kuehn et al. (2020) mentioned that issues related to monitoring instruments (sensors), like truncation, might occur when the dataset consists of large distances. To address the truncation issue, researchers have adopted two approaches: (1) introducing Rmax (maximum usable distance) and working with a truncated dataset (Joyner and Boore 1981a, b; Chiou and Youngs 2014; Saffari et al. 2012; Abrahamson et al. 2014; Zafarani and Soghrat 2022, 2023), and (2) employing a truncated regression (Bayesian model) (Barani et al. 2017; Kuehn et al. 2020). To avoid data truncation issues, Chiou and Youngs (2008a) and Chiou and Youngs (2008b) used distances up to 70 km. Chiou and Youngs (2014), to use the data at a distance larger than 70, introduced Rmax for each individual earthquake. Based on the two-step maximum likelihood approach proposed by Joyner and Boore (1993), as well as the probability density function (PDF) related to the truncated dataset presented by Bragato (2004), Chao and Chen (2019) developed a new two-step maximum likelihood method. Kuehn et al. (2020) introduced a Bayesian regression model that takes into account data truncation regarding trigger issues.
In the case of the Iranian dataset, it has been mentioned in the literature that some stations have a trigger level of 10 gal (0.01 g) (Hamzehloo and Mahood 2012; Kuehn et al. 2020; Shahvar et al. 2021). However, it is noteworthy that there have recently been efforts to install new sensors or replace the older ones in the Iranian strong-motion network. Thus, it is unclear how many stations in our dataset are affected by the triggering issue. Nevertheless, as some portion of our dataset comes from events recorded before 2000, we assume that the truncation issue might have some impact on the current dataset and that lower ground motions (at large distances and low magnitudes) might not be recorded. While triggering is on PGA, this might affect the spectrum and all ground motion parameters that might be correlated with PGA. In general, the triggering issue and, consequently, the data truncation could be the case in many regions of the world. Data truncation could occur even in the case of the California dataset and the Taiwan dataset. Data truncation is often not mentioned so well in the literature, even in studies regarding the NGA-West2 dataset other than Chiou and Youngs (2014). As mentioned by Kuehn et al. (2020), Zafarani and Soghrat (2022), and Zafarani and Soghrat (2023), the triggering level and potential data truncation were not addressed in most of the previous Iranian GMMs, apart from the studies conducted by Ghasemi et al. (2009) and Saffari et al. (2012). Recently, Zafarani and Soghrat (2022) and Zafarani and Soghrat (2023) developed new Spectral and Non-Spectral GMMs for Iran using a truncated Iranian dataset. To address the potential truncation in our dataset, we have used the truncation method of Fukushima et al. (2000) and considered a trigger threshold of about 0.01 g, and for Mw 4, 5, 6, and 7, Rmax has been selected as 30, 60, 110 and 170 km. We excluded the data with a distance beyond Rmax for each magnitude range. We have worked with two separate datasets, all data (without restriction) and truncated dataset. Henceforth, we will refer to the entire dataset without any limitations as all data and the dataset after excluding records based on the truncation criteria as the truncated dataset.
In this study, we considered four different models. In model M1, we decided to develop both event and station terms (random effects on the between-event and between-station terms) within a single mixed-effects regression. In model M2, we tested the efficacy of mixed-effects regression by conducting a two-step regression process in which we first derived event terms from an initial regression. Then, we developed station terms using the within-event residuals obtained from that same initial regression. In model M3, we decided to develop event terms (random effects on the between-event residuals) within a single mixed-effects regression. Model M4 is identical to model M1, with the only difference being the utilization of all data (non-truncated dataset). Similar to Stafford (2014), our results indicate that employing the two-step approach results in a smaller between-station standard deviation. Furthermore, our findings indicate that the results from both all data and the truncated dataset are very similar, with the truncated dataset predicting slightly higher values for certain magnitude-distance combinations.
2 Data processing
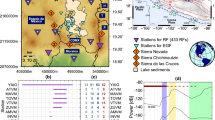
We used the acceleration time histories provided by the Building and Housing Research Center (BHRC). The dataset consists of 2581 strong ground motion records, recorded by 706 stations and obtained from 424 events between 1976 and 2020 (Fig. 1). We considered the stations that recorded at least three earthquakes and events with at least three records for each earthquake (Tables S14 and S15).

Map of the Iranian plateau, locations of selected earthquakes (blue circles), and considered stations (yellow triangles)
To mitigate the truncation issue in our dataset, we consider Rmax for each event individually, which means that at distances less than Rmax, the truncation in the dataset is not expected to affect the results (Fukushima and Tanaka 1990; Fukushima 1997), and this distance is related to the magnitude. To address the possible truncation issue, following Zafarani and Soghrat (2022) and Zafarani and Soghrat (2023), we used the truncation method of Fukushima et al. (2000). We considered a trigger threshold of about 0.01 g and for Mw 4, 5, 6 and 7, Rmax has been selected as 30, 60, 110 and 170 km, respectively. We excluded the data with distances greater than Rmax for each magnitude range. A comprehensive discussion regarding the potential truncation issue in the Iranian strong motion dataset is beyond the scope of this study. Instead, we examine the truncated dataset’s impact on various FAS models. After carefully considering the truncation threshold, 510 records were excluded from the dataset. Consequently, the truncated dataset’s number of records, events, and stations has been reduced to 2071, 408, and 636, respectively.
The selected dataset comprises earthquake recordings with magnitudes ranging from Mw 4.0 to 7.4 and recorded at distances from 1 to 170 km for the truncated dataset and from 1 to 220 km for all data (Fig. 2a). In this study, the National Earthquake Hazards Reduction Program (NEHRP) site classification (Building Seismic Safety Council [BSSC], 2009) was employed. Histograms of the data in the different distance and magnitude bins are presented in Fig. 2b, c respectively. The distribution of VS30 values in our selected dataset is illustrated in Fig. 2d.

a Magnitude-distance (Rjb) distribution, b distance (Rjb) histograms, c magnitude (Mw) histograms, and b VS30 histogram for the selected dataset
Our dataset contains earthquakes reported using different magnitude scales, such as local (ML), body-wave (mb), and Nuttli (MN) magnitude scales, resulting in a non-uniform event magnitude scale. To standardize the magnitude scale, we employed empirical relationships for the Iranian Plateau developed by Mousavi-Bafrouei and Babaie Mahani (2020) to convert various magnitude scales to a consistent Mw scale. In line with previous studies (such as Sedaghati and Pezeshk 2017; Zafarani and Soghrat 2017, 2022, 2023; Zafarani et al. 2018a, b; Farajpour et al. 2018, 2019), Rjb has been utilized as a distance metric when the relevant information was available in the literature; otherwise, epicentral distance metric (Repi) has been employed as a proxy for Rjb. Conversion among various distance metrics can be performed following Tavakoli et al. (2018) and Kayastha et al. (2023).
To compute two orthogonal horizontal components, namely the H1 (North–South) and H2 (East–West), the longitudinal (L) and transverse (T) components were rotated. We conducted baseline corrections by removing the mean and linear trends from the acceleration time histories. After extracting the noise from the pre-event part of the time histories, we separately computed each component’s signal-to-noise ratio (SNR) (H1 and H2). Following the suggestion made by Boore and Bommer (2005), we only worked with records for which SNR is higher than 3. Following Dawood et al. (2016), we applied a cosine taper to the time series to maintain zero levels at both ends of the acceleration time history, keeping the taper window length at 5% on either side of the total signal duration. The time domain two passes of an acausal (phaseless) eight-pole Butterworth filter has been used (Boore and Akkar 2003). We used an acausal filter with zero phase shift to avoid changes to the phase part of signals that may result from causal filters. Before filtering, we have done zero padding (extended symmetrical acceleration time histories at both ends) to decrease the impact of the filter response (Boore 2005).
We used the Fast Fourier Transform (FFT) algorithm to calculate the FAS for each horizontal component, individually. The entire acceleration trace was used to compute the FAS at selected frequency ordinates in the 0.3 to 30 Hz range. We applied a smoothing technique to the resulting FAS using the approach proposed by Konno and Ohmachi (1998). The bandwidth parameter was set to b = 40, and the smoothing window spanned a logarithmically spaced frequency range of 0.3–30 Hz (40 frequency points). Finally, an average rotation-independent FAS was computed using the following equation (Bayless and Abrahamson 2019b):
where FASH1 and FASH2 corresponded to smoothed FAS for H1 and H2, respectively.
3 Functional forms and regression analysis
GMMs typically provide median ground motions in relation to earthquake Mw, distance R [i.e., Joyner–Boore distance metric (Joyner and Boore 1981a, b)], site condition (i.e., VS30), source mechanism, basin depth, location, and more complex distance metrics (i.e., Bozorgnia et al. 2014). The following functional form is taken into account in this study:
where Yij is the natural logarithm of the predicted median GMIM for earthquake i at station j, X is other predictive parameters outside of magnitude, distance, and VS30 (e.g., style-of-faulting), and \(\uptheta\) is the model coefficients vector (Abrahamson and Youngs 1992). These equations are developed empirically from recorded ground-motion data for FAS at different frequencies (f), different kinds of durations (e.g., D5-75, D5-95, D20-80), SA, PGA, and PGV (Ghofrani and Atkinson 2013; Bora et al. 2014, 2015, 2019; Sedaghati and Pezeshk 2017; Zafarani et al. 2018a; Javan-Emrooz et al. 2018; Farajpour et al. 2019; Maiti et al. 2021; Davatgari Tafreshi and Bora 2023).
The differences between predicted \(\text{F(}{\text{M}}_{i},{\text{R}}_{ij},{\text{V}}_{\text{S30}}, {\text{X}}, \uptheta)\) and observed (Yij) ground motion is the residual \(\Delta\) (misfit). The total variability of the ground motion is described by a random variable \(\Delta\). By considering the fundamentals of ground-motion regression models, the residuals (\(\Delta\)) were broken down into their individual components to provide a better understanding of the uncertainty in seismic hazard studies (Brillinger and Preisler 1984, 1985; Abrahamson and Youngs 1992; Joyner and Boore 1993; Al Atik et al. 2010; Baltay et al. 2017). The mixed-effects regression method (Bates et al. 2015) enables the breakdown of overall residuals (\(\Delta\)) into between-event \({\delta B}_{e}\) (also known as an event term or an inter-event residual), and within-evet residual \({\delta W}_{es}\), with zero means and standard deviations τ, and ϕ, respectively (Al Atik et al. 2010). \({\delta B}_{e}\) can be estimated as the average logarithmic difference between the observed ground motion intensity measure (GMIM) from an individual earthquake and the GMIM predicted by the GMM. The stress parameter and radiation pattern are examples of source-related variations that are thought to be captured by \({\delta B}_{e}\). The \({\delta W}_{es}\) is the discrepancy between the median GMIM predicted by the GMM plus \({\delta B}_{e}\) and the GMIM at a single site for a certain earthquake. The repeatable site effects are included in \({\delta W}_{es}\). A mixed-effects regression can be used to partition \({\delta W}_{es}\) into a site-to-site residual (\({\delta S}_{S2S}\)) and the single-station within-event residual (ε) (within-site residual, also called event-site corrected residual), along with their respective standard deviations, ϕS2S and ϕSS, respectively. This is achieved by applying random effects to the site-to-site terms in the regression (Villani and Abrahamson 2015). The station-to-station variability in observed GMIM with regard to the median model from GMM is captured by \({\delta S}_{S2S}\), while ε signifies the path-related variations.
As \({\delta B}_{e},\) \({\delta S}_{S2S,}\) and ε are uncorrelated; it is possible to express the total standard deviation of the GMM as: \(\sigma =\sqrt{{\tau }^{2}+{\phi }_{ss}^{2}+{\phi }_{s2s}^{2}}\). The findings of seismic hazard analyses are considerably impacted by\(\sigma\), especially for low probabilities, as it is treated as an aleatory variability (Atkinson and Charlwood 1983; Restrepo-Velez and Bommer 2003; Bommer and Abrahamson 2006; Ghofrani and Atkinson 2013).
The fundamental model that depicts the far-field FAS of ground motion acceleration is identified in relation to the magnitude and stress parameter (Δσ) as the source parameters (S) (Brune’s \({\omega }^{2}\) source model (1970, 1971)); the geometrical spreading and anelastic attenuation (Q) characterize the path effects (A), and site amplification (Boore and Joyner 1997; Joyner and Boore 1981a, b; Boore 2003) and high-frequency attenuation parameter (κ0) characterize the site effects (G) as:
For high-frequency ground motion modeling, this analytical model, together with a spectrum of random phase angles, can be employed (Hanks and McGuire 1981; Boore 2003). This seismological model was utilized by Boore (2003) in stochastic simulation. Some examples of stochastic simulation in Iran include the works of Mousavi et al. (2007), Zafarani et al. (2009), Zafarani and Soghrat (2012), and Soghrat et al. (2012).
The primary step in calibrating GMMs is selecting a proper functional form, although the impact of selecting a particular regression method to obtain the model coefficients is negligible (Sedaghati and Pezeshk, 2016a). Therefore, to choose a functional form for the models, numerous initial regressions and visual inspections were conducted, and the Bayesian information criterion (BIC), the loglikelihood (LL), and the Akaike information criterion (AIC) were compared.
The full stochastic model, which takes into account all the seismological parameters that dictate the form of the source spectrum, path and site effects, including stress parameter, \(\kappa\), Q, and site amplification, maybe the primary option for the functional form of FAS model. Nonetheless, incorporating numerous predictor variables usually results in the non-convergence of the regression procedure. Employing complex functional forms does not necessarily ensure higher accuracy or a decrease in standard deviations compared to simple, functional forms (Kaklamanos and Baise 2011). We have selected simple yet powerful enough functional forms for FAS models with fewer predictor variables to reflect the observed scaling of ground motion with commonly used predictors like Mw, Rjb, and VS30.
The purpose of defining and evaluating GMMs in this study is to investigate various functional forms that might better capture observed scaling and variance in the data and evaluate the impact of using all data against a truncated dataset. Therefore, four basic models, denoted as models M1–M4, are identified in this study. Model M1 is a partially non-ergodic model with random effect terms on \({\delta B}_{e}\) and \({\delta S}_{S2S}\), that the functional form is defined by the following relationship (mixed-effects regression in one step):
where Y represents the average rotation independent (of two horizontal components) FAS (in cm/s) at frequency f, and the predictor variables are Mw, Rjb, and VS30. The source, path, and site terms are denoted by FE, FP, and FS, respectively. Table S1 defines the components comprising the aleatory variability model employed in this study. Additional information in this regard can be found in Rodriguez-Marek et al. (2014) and Campbell et al. (2022) articles.
The following expression defines the source (event) function FE:
where Mh is the hinge magnitude, and c1 to c3 are the fixed-effect coefficients. The magnitude scaling break was tested at various magnitudes, and the option with the lowest variance was chosen. Based on regression checks, a frequency-independent value for Mh = 6 was chosen.
The path term FP (a combination of the anelastic attenuation and the geometrical spreading) (Sedaghati and Pezeshk 2016b; Bora et al. 2019) is expressed as follows:
As shown below, a linear site term FS was chosen:
Model M2 is a partially non-ergodic model with random effects terms on \({\delta B}_{e}\), and \({\delta S}_{S2S}\). In this case, the mixed-effects regression was performed in two steps: 1) first, the random effects were allowed only on event terms and estimating coefficients c0, c1, c2, c3, c4, c5, and c7 using Eq. (8), 2) in the second step, the within-event residuals \((\delta W)\) were used to constrain the linear VS30 term using Eq. (9) in which the random-effects station-terms (\({\delta S}_{S2S}\)) were estimated. To separate \({\delta S}_{S2S}\) from the total residual, we perform the regression analysis in two steps (Eqs. 8–10, mixed-effects regression in two steps):
in which
where \(\delta W\) is two steps mixed-effects regression within event residual (Al Atik et al. 2010). The site function for two steps regression analysis is defined as:
in which c8 and c9 are fixed-effect coefficients.
Model M3 is a partially non-ergodic model with random effect terms only on \({\delta B}_{e}\) that the functional form is defined by the following relationship (mixed-effects regression in one step):
Model M4 is identical to model M1, with the only difference being the utilization of all data. In other words, for models M1–M3, the truncated dataset has been used, whereas for Model M4, all data has been used.
Note that the coefficient c6 (pseudo-depth term), for all four models was derived in the first step by performing nonlinear least-squares regression. Linear mixed-effects regression (Bates et al. 2015) was employed to derive the other model coefficients and standard deviations, while c6 was fixed at the value obtained from the nonlinear least-squares regression. Due to its ability to simultaneously fit several random-effect components and to calculate extra goodness-of-fit measures, linear mixed-effects regression has benefits over nonlinear mixed-effects regression (Campbell et al., 2022).
We used a simple linear site term as a function of VS30. In our models, we also tested other forms of site response function (more complex) and nonlinear site behavior. This did not improve the median ground-motion predictions and standard deviations. Due to the lack of records in our dataset with high Mw and short distances recorded at low VS30 stations, similar to Sedaghati and Pezeshk (2017), we were unable to consider the nonlinear site amplification effects. \(\sigma\) was diminished by erasing the style-of-faulting term from the functional form. While ϕS2S remains almost constant at most frequencies, regardless of the inclusion or exclusion of the style-of-faulting term, removing the term leads to a reduction in both \({\delta B}_{e}\) and \(\varepsilon\). Therefore, based on Kotha et al. (2016) and Sedaghati and Pezeshk (2017), we made the decision to exclude the style-of-faulting term from the final functional forms. Also, it is worth mentioning here that for a large part of our dataset, style-of-faulting was unknown.
The anelastic attenuation term becomes significant at moderate to long distances, typically R ≥ 80 km. In GMMs, the coefficients c4 and c5 represent the linear decay of ground-motion, whereas c7 quantifies the mean rate of exponential decay. Given that c4, c5, and c7 jointly model the decay of ground motions with distance, it is anticipated that there will be a significant correlation among their estimates (Abrahamson et al. 2014; Boore et al. 2014b; Campbell and Bozorgnia 2014). Hence, it would be suitable to describe c7 as a coefficient for the anelastic attenuation term. When some of the anelastic attenuation coefficients c7 were observed to be positive, we excluded them from the regression analysis and replaced them with zero (Sedaghati and Pezeshk 2017). The presence of positive values for c7 is physically unrealistic and may indicate compensation for a biased geometrical spreading term (Campbell et al., 2022).
We used a mixed-effects regression technique to determine the coefficients for the FAS models (Eqs. 4 to 11) (Bates et al. 2015). Using smoothed FAS, we performed a frequency-by-frequency regression analysis on 40 equally spaced frequency points (in ln units) between 0.3 and 30 Hz. Tables 2, 3, 4, 5, and S4, S7, S8, and S11 in the supplemental material to this article provide the final coefficients along with their corresponding standard deviations.
A range of goodness-of-fit indicators was used to evaluate the statistical effectiveness of the GMMs. The p values of the regression coefficients are the most typical goodness-of-fit indicator. The standard errors of coefficients associated with FAS models and statistical p values are presented in Tables S2, S3, S5, S6, S9, S10, S12, and S13. After taking into account the discussion by Campbell et al. (2021a, b) and Campbell et al. (2022), we opted not to eliminate coefficients from the model solely based on their p values exceeding 0.05 (5%). Engineering seismologists and other scientific fields frequently use this strategy (eliminating coefficients with p values exceeding 0.05). We deem these models acceptable for shallow crustal earthquakes occurring in active tectonic regions, with applicable magnitudes and distances ranging from 4.0 to 7.4 and 1 to 170 km, respectively.
4 Median predictions
This section shows comparisons of the median predictions from the FAS empirical models obtained in this study with recently published models. The comparisons for FAS GMMs are performed for M1–M4 models and with the Bora et al. (2014) study (hereafter B14). The B14 model was calibrated and relied on the pan-European (RESORCE-2012) dataset. The differences in median predictions between different models are usually because of differences in underlying datasets and functional dependencies over magnitude, distance, and VS30.
Figures 3 and S1 compare median predictions versus Joyner-Boore distance for Mw = 4.5 and Mw = 6.5, respectively. Figure 3 shows that all models M1–M3 are very similar. They differ at Rjb > 60–70 km, with M4 mainly at 0.54 and not so much at 1 Hz. All models, M1–M4, are different than B14 at near distances R < 20 km. This could be due to the larger magnitude range in the European dataset. At 5.2 and 10.3 Hz, the differences beyond 20–30 km are due to variations in the dataset and anelastic attenuation.

Comparisons of distance scaling for the FAS models obtained in this study and model from the previous study (B14) for Mw = 4.5, VS30 = 800 m/s at selected frequencies. Circles are the observed data
Figure S1 shows that for the magnitude of 6.5, the M1, M2, and M3 models’ median predictions are generally consistent with each other and model M4. However, there is a discrepancy between models M1, M2, and M3 compared to models M4 and B14. At the frequency of 0.54 Hz, all four models predict approximately the same values across the entire distance ranges, while the B14 model predicts higher values across the entire distance ranges in comparison to all four models. At the frequency of 1.0 Hz, at smaller distances (30 km > Rjb), models M1, M2, and M3 consistently predict higher values than model M4. In comparison, at larger distances (30 km < Rjb), models M1, M2, M3, and M4 consistently predict the same values. The B14 model consistently predicts lower values than all four models except the same values with model M4 at smaller distances (4 km > Rjb). At frequencies of 5.2 Hz and 10.3, all models M1–M4 are the same, while the B14 model consistently predicts lower values than all four models across the entire distance ranges.
It is evident from Figs. 3 and S1 that the differences in the regression method have not significantly impacted distance scaling. However, the use of a truncated dataset does affect the distance scaling. The B14 distance scaling is somewhat distinct from our models, which indicates variability in regional attenuation captured by the two datasets and functional forms.
Figures 4 and S2 compare median predictions versus magnitude for Rjb = 30 and Rjb = 60 km, respectively. The magnitude scaling (i.e., slope) in lower frequencies is relatively stronger than in higher frequencies. Figure 4 shows that for the distance of 30 km, the median predictions of the M1, M2, and M3 models are generally consistent. However, there is a discrepancy between models M1, M2, and M3 compared to models M4 and B14. At the frequency of 0.54 Hz, models M1, M2, M3, and M4 exhibit good agreement across all magnitude ranges, whereas the B14 model predicts higher values at 4.5 < Mw < 6.5 and lower values at Mw < 4.5 and 6.5 < Mw. At the frequency of 1 Hz, models M1, M2, M3, and M4 exhibit good agreement across all magnitude ranges, whereas the B14 model predicts slightly higher values at Mw < 5.5 and lower values at Mw 5.5 < Mw. At the frequency of 5.2 Hz, models M1, M2, and M3 exhibit good agreement across all magnitude ranges, whereas the M4 model predicts slightly lower values across all magnitude ranges. The B14 model predicts lower values across all magnitude ranges than all four models. At 10.3 Hz, models M1, M2, and M3 exhibit good agreement across all magnitude ranges, whereas the M4 model predicts slightly lower values across all ranges. The B14 model predicts slightly lower values across all magnitude ranges than all four models.

Comparisons of magnitude scaling for the FAS models were obtained in this study and model from the previous study (B14) for Rjb = 30 km and for VS30 = 800 m/s at selected frequencies. Empty circles are the observed data
Figure S2 shows that for the distance of 60 km, the median predictions of the M1, M2, and M3 models are generally consistent. However, there is a discrepancy between models M1, M2, and M3 compared to models M4 and B14. At the frequency of 0.54 Hz, models M1, M2, M3, and M4 exhibit good agreement across all magnitude ranges, whereas the B14 model predicts higher values at 4.5 < Mw < 6.5 and lower values at Mw < 4.5 and 6.5 < Mw. At the frequency of 1 Hz, models M1, M2, M3, and M4 exhibit good agreement across all magnitude ranges, whereas the B14 model predicts slightly higher values at Mw < 5.5 and lower values at 5.5 < Mw. At the frequency of 5.2 Hz, models M1, M2, and M3 exhibit good agreement across all magnitude ranges, whereas the M4 model predicts slightly lower values across all magnitude ranges. The B14 model predicts lower values across all magnitude ranges than all four models. At 10.3 Hz, models M1, M2, and M3 exhibit good agreement across all magnitude ranges, whereas the M4 model predicts slightly lower values across all ranges. The B14 model predicts slightly lower values across all magnitude ranges than all four models. As was observed earlier and evident from Fig. 4 and S2, the differences in the regression method have not had a significant impact on magnitude scaling. However, the use of a truncated dataset does affect the magnitude scaling. However, one can observe a difference in scale between our models and the B14 model. We attribute this to the differences in underlying datasets and functional forms.
The variation of the estimated FAS median predictions (full spectra) is depicted in Fig. 5. The FAS model predictions from B14 are also displayed for comparison. The FAS full spectra predictions from the M1, M2, and M3 models are generally in agreement with each other. As depicted in Fig. 5, models M1, M2, and M3 predict slightly higher values than model M4. However, model B14 predicts higher values at lower frequencies (e.g., up to approximately 1 Hz) and lower values at higher frequencies (e.g., beyond approximately 1 Hz). Figure 5 demonstrates that the differences in the regression method have not had a significant impact on FAS full spectra, while the use of a truncated dataset does affect the FAS over a range of frequencies. However, one can observe a difference in FAS full spectra between our models and the B14 model. The major reason for the discrepancies with the B14 model at lower frequencies is the magnitude range covered by the two datasets, as the (average) corner frequency associated with the B14 model is lower than that of current models. Similarly, consistent lower median predictions of the B14 model at high frequencies signify the differences in regional attenuation.

FAS model predictions (full spectra) and comparisons at M = 5.5 and 6.5, Rjb = 30 and 60 km and for VS30=800 m/s
5 Residuals
We evaluate the reliability of the chosen functional forms for GMM-FASs and the resulting coefficients by analyzing residual trends. To examine the residuals, we plot them against the three estimator parameters (magnitude, distance, and VS30) at selected frequencies. Figures 6, 7, 8, 9, 10 and 11 and S3–S14 show plots of residuals versus the three estimator parameters, stress drop, and \({\kappa }_{0}\), demonstrating the robustness of both the regression method and the FAS functional forms. In all cases, we observed a wider spread at lower frequencies. This wider spread at lower frequencies is likely caused by noise, filtering in unprocessed data, or limitations in the ability of the simple proxy (VS30) to model site amplification effects beyond a certain extent. We plotted the residuals separately for each of the three regions, Northern Iran, East-Central Iran, and Zagros, to demonstrate how residuals vary regionally.

\({\delta B}_{e}\) versus magnitude (Model M1) for events from Northern Iran (cyan circles), Zagros (blue circles), and East-central Iran (grey circles) at f = 0.54, 3.5, and 10.3 Hz. Mean residuals and the standard deviation of the mean are shown as dots with vertical bars (error bars) in bins of 0.5 magnitude

\({\delta B}_{e}\) versus magnitude (Model M4) for events from Northern Iran (cyan circles), Zagros (blue circles), and East-central Iran (grey circles) at f = 0.54, 3.5, and 10.3 Hz. Mean residuals and the standard deviation of the mean are shown as dots with vertical bars (error bars) in bins of 0.5 magnitude

\({\mathrm{\delta S}}_{{\text{S}}2{\text{S}}}\) versus station VS30 (Model M1) values for Northern Iran (cyan circles), Zagros (blue circles), and East-central Iran (grey circles) at f = 0.54, 3.5, and 10.3 Hz. Mean residuals and the standard deviation of the mean are shown as dots with vertical bars (error bars) in bins of 100 m/s VS30

\({\mathrm{\delta S}}_{{\text{S}}2{\text{S}}}\) versus station VS30 (Model M4) values for Northern Iran (cyan circles), Zagros (blue circles), and East-central Iran (grey circles) at f = 0.54, 3.5, and 10.3 Hz. Mean residuals and the standard deviation of the mean are shown as dots with vertical bars (error bars) in bins of 100 m/s VS30

ε versus Rjb (Model M1) for Northern Iran (cyan circles), Zagros (blue circles), and East-central Iran (grey circles) at f = 0.54, 3.5, and 10.3 Hz. Mean residuals and the standard deviation of the mean are shown as dots with vertical bars (error bars) in bins in equally spaced (in log) distance bins

ε versus Rjb (Model M4) for Northern Iran (cyan circles), Zagros (blue circles), and East-central Iran (grey circles) at f = 0.54, 3.5, and 10.3 Hz. Mean residuals and the standard deviation of the mean are shown as dots with vertical bars (error bars) in bins in equally spaced (in log) distance bins
Figures 6, 7, S3, and S4 depict the \({\delta B}_{e}\) versus the magnitude at selected frequencies for four models. We can observe a rather unbiased variation of \({\delta B}_{e}\) with magnitude for all four models. The Iranian dataset for earthquakes with Mw > 6.5 lacks the near distance range (Zolfaghari and Darzi 2019; Farajpour et al. 2019), and our dataset also lacks near-source data for earthquakes with large magnitude (Mw > 6.5).
Figures S5–S8 depict the variation of \({\delta B}_{e}\) against the stress drop (\(\Delta \sigma\)) at selected frequencies for all four models. Stress drops that we used are driven by Motazedian (2006), Zafarani and Hassani (2013), Meghdadi and Shoja-Taheri (2014), and Davatgari Tafreshi et al. (2021). There were no clear regional patterns observed in between-event residuals plotted against \(\Delta \sigma\).
The \({\delta S}_{S2S}\) is displayed versus station VS30 at selected frequencies for M1, M2, and M4 in Figs. 8, 9, and S9. We do not observe any discernible trends and clear regional patterns in between-station residual versus VS30, indicating that a linear site-response term is adequate to include site effects in the data.
\({\delta S}_{S2S}\) is plotted against the station \({\kappa }_{0}\) values at selected frequencies for M1, M2, and M4 in Figures S10–S12. The \({\kappa }_{0}\) values that we used are driven by Davatgari Tafreshi et al. (2022). Our analysis of \({\delta S}_{S2S}\) against \({\kappa }_{0}\) did not reveal any discernible regional trends.
ε is plotted against distance at selected frequencies for models M1, M2, and M4 in Figs. 10, S13, and 11. The variability in path characteristics, such as geometrical spreading and anelastic attenuation, of the recorded ground motion should be represented by such residuals (Bora et al. 2019). There is no significant bias observed with distance. Through statistical analysis, Farajpour et al. (2019) suggested no statistically significant differences in anelastic attenuation across different regions in Iran. Similar results were reached by Ghasemi et al. (2009) and Sedaghati and Pezeshk (2017). \({\delta W}_{es}\) is plotted against distance at selected frequencies for model M3 in Figure S14.
Aleatory variability (previously called randomness) is inherent uncertainty (e.g., future earthquake location (within fault), uncertainties in ground motion predictive relations (sigma), and the direction of rupture propagation, described by PDFs and probability functions) in a random process. Aleatory variabilities are directly incorporated in probabilistic seismic-hazard assessment. They cannot be diminished by gathering more information or data, while epistemic uncertainties are usually handled by adding several GMMs to a logic tree (Farajpour et al. 2019).
A comparison of the aleatory variabilities against frequency is shown in Fig. 12. To compare variability in Fig. 12, we also added models by Bora et al. (2014) and Bora et al. (2019).

Comparison of standard deviations
τ from all four models are similar. In model M4, the values of τ are slightly higher compared to models M1, M2, and M3, while B14 and B19 have higher values of τ compared to models M1 to M4. Model M4 exhibits a higher ϕS2S value than model M1, while model M1 has a higher ϕS2S value than model M2. Additionally, B19 demonstrates higher ϕS2S values than models M1, M2, and M4. The ϕSS values between all the models are mostly identical, except the B19 model has higher values beyond 20 Hz. Similarly, the σ values are also mostly the same for the models derived in this study, with slightly higher values for model M3. The σ values from B14 and B19 models are higher than those from models derived in this study, which again signifies the role of systematic regional variations contributing to larger σ in larger datasets that B14 and B19 models are calibrated on.
6 Conclusions
In this study, we used 2581 acceleration time histories from 1976 to 2020 made at 706 stations from 424 events with magnitude ranging from Mw 4.0 to 7.4 and records recorded at Rjb ≤ 202 km. To address the potential issue of truncation in our dataset, we have used the truncation method of Fukushima et al. (2000). We considered a trigger threshold of about 0.01 g. For Mw 4, 5, 6, and 7, Rmax has been selected as 30, 60, 110, and 170 km. We excluded the data with a distance beyond Rmax for each magnitude range. The number of records, events, and stations for the truncated dataset has been reduced to 2071, 408, and 636, respectively. The catalog was homogenized by converting different magnitude types into a consistent moment magnitude. For analysis, the entire acceleration time series was processed through baseline correction, tapering, and filtering (with zero padding before filtering). Using the Fast Fourier Transform (FFT) algorithm, the Fourier amplitude spectrum (FAS) was calculated for each horizontal component independently. Subsequently, an average-rotation-independent FAS was utilized for further analysis. The FAS has been smoothed using the Konno and Ohmachi (1998) filter with a bandwidth of 40 for the smoothening window throughout a logarithmically spaced frequency range of 0.3–30 Hz (40 frequency points).
We used simple, functional forms for the empirical FAS equations incorporating magnitude, Rjb, and VS30. The style-of-faulting is another possible predictor variable that could be considered (Bora et al. 2014). However, Farajpour et al. (2019) determined no statistical differences among the variety of fault mechanisms in Iran. Moreover, the relationship between FAS and the style-of-faulting was not clearly defined. To keep simplicity in the equation, we did not consider the variety of fault mechanisms.
According to Bora et al. (2016), understanding how Fourier spectral ordinates behave is key to comprehending many of the attributes of response spectral ordinates. We presented a GMM-FAS using a dataset from Iran. Studies related to seismic-hazard analysis can utilize the proposed empirical Fourier model. The GMMs represent the median estimate and its associated aleatory variability in ground-motion prediction for Iran. The models can be applied for magnitudes ranging from 4.0 to 7.4 and distances ranging from 1 to 170 km.
In the developed FAS models, we defined four base models designated as models M1, M2, M3, and M4. We developed event and station as random-effects in a single-step mixed-effects regression in models M1 and M3. A two-step regression was used to test the efficacy of mixed-effects regression on model M2, where station terms were developed from within-event residuals obtained through an initial regression that included event terms. Moreover, the impact of data-truncation was evaluated by developing a separate model M4, with the full dataset. Model M4 is identical to model M1, with the only difference being the utilization of all data (non-truncated dataset). The model M4 calibrated on all the data results in slightly lower median predictions than model M1 over a broad range of frequencies, as expected for a truncation threshold based on PGA.
By analyzing residual trends, the robustness of selected functional forms was evaluated. Taking into account between-event, between-station, and single-station within-event residuals, the distribution for the FAS models did not exhibit any clear trends. Also, the residual analysis depicted negligible regional variations in predictions concerning magnitude, stress parameter, VS30, kappa, and distance.
Our results show that the differences in the regression method have not made significant differences, whereas a truncated dataset impacts the results. These models will be applicable for engineering purposes to generate response spectra and in site-response studies. This proposed model, along with an appropriate duration model (e.g.,Zafarani and Soghrat 2022; Davatgari Tafreshi and Bora 2023), can be combined with RVT (e.g., Bora et al. 2014, 2015, 2019).
7 Data and resources
The data utilized in this paper were provided by the Building and Housing Research Center (BHRC) of Iran (http://www.bhrc.ac.ir/, last accessed December 2022). The supplemental material to this article includes 14 figures and 13 tables. Figures S1 and S2 depict a comparison of median predictions as a function of distance and magnitude respectively. Figures S3 and S4 depict the variation of between-event residuals against the magnitude at selected frequencies for M2, and M3 models. Figures S5–S8 show the variation of \({\delta B}_{e}\) against the stress drop (\(\Delta \sigma\)) at selected frequencies for all four models. Figures S9–S12 show the variation of \({\delta S}_{S2S}\) against station VS30 and \({\kappa }_{0}\) values at selected frequencies. Figures S13 and S14 show the variation of ε and \({\delta W}_{es}\) against distance at selected frequencies for models M2, and M3. Table S1 defines the components of the aleatory variability model used in this study. Tables S4, S7, S8, and S11 provide the final coefficients and corresponding standard deviations. The standard errors of coefficients associated with FAS models and statistical p values are presented in Tables S2, S3, S5, S6, S9, S10, S12, and S13. Tables S14 and S15 provide a summary of earthquakes and seismic stations used in this study.
References
Abrahamson NA, Youngs RR (1992) A stable algorithm for regression analyses using the random effects model. Bull Seismol Soc Am 82(1):505–510
Abrahamson NA, Silva WJ, Kamai R (2014) Summary of the ASK14 ground motion relation for active crustal regions. Earthq Spectra 30(3):1025–1055
Al Atik L, Abrahamson NA, Bommer JJ, Scherbaum F, Cotton F, Kuehn N (2010) The variability of ground-motion prediction models and its components. Seismol Res Lett 81(5):794–801
Barani S, Albarello D, Massa M, Spallarossa D (2017) Influence of twenty years of research on ground-motion prediction equations on probabilistic seismic hazard in Italy. Bull Seismol Soc Am 107(1):240–255
Bragato PL (2004) Regression analysis with truncated samples and its application to ground-motion attenuation studies. Bull Seismol Soc Am 94(4):1369–1378
Atkinson GM, Charlwood RG (1983) Uncertainties in probabilistic seismic hazard assessment as a function of probability level: a case history for Vancouver, British Columbia. Bull Seismol Soc Am 73:1225–1241
Atkinson GM, Mereu R (1992) The shape of ground motion attenuation curves in southeastern Canada. Bull Seism Soc Am 82:2014–2031
Baltay A, Hanks TC, Abrahamson NA (2017) Uncertainty, variability, and earthquake physics in ground-motion prediction equations. Bull Seism Soc Am 107(4):1754–1772
Bates D, Mächler M, Bolker BM, Walker SC (2015) Fitting linear mixed-effects models using lme4. J Stat Softw 67(1):1–48
Bayless J, Abrahamson NA (2019a) An empirical model for the interfrequency correlation of epsilon for Fourier amplitude spectra. Bull Seism Soc Am 109:1058–1070
Bayless J, Abrahamson NA (2019b) Summary of the BA18 ground-motion model for Fourier amplitude spectra for crustal earthquakes in California. Bull Seism Soc Am 109:2088–2105
Bommer JJ, Abrahamson NA (2006) Why do modern probabilistic seismic-hazard analyses often lead to increased hazard estimates? Bull Seism Soc Am 96(6):1967–1977
Boore DM, Joyner WB (1997) Site amplifications for generic rock sites. Bull Seism Soc Am 87:327–341
Boore DM (2003) Simulation of ground motion using the stochastic method. Pure Appl Geophys 160:635–676
Boore DM, Akkar S (2003) Effect of causal and acausal filters on elastic and inelastic response spectra. Earthq Eng Struct Dyn 32:1729–1748
Boore DM, Bommer JJ (2005) Processing of strong-motion accelerograms: needs, options and consequences. Soil Dyn Earthq Eng 25:93–115
Boore DM (2005) SMSIM—Fortran programs for simulating ground motions from earthquakes: version 2.3—a revision of OFR 96-80-A. http://www.daveboore.com/smsim
Boore DM, Di Alessandro C, Abrahamson NA (2014a) A generalization of the double-corner-frequency source spectral model and its use in the SCEC BBP validation exercise. Bull Seism Soc Am 104:2387–2398
Boore DM, Stewart JP, Seyhan E, Atkinson GM (2014b) NGA-West2 equations for predicting PGA, PGV, and 5% damped PSA for shallow crustal earthquakes. Earthq Spectra 30:1057–1085
Bora SS, Scherbaum F, Kuehn N, Stafford P (2014) Fourier spectral- and duration models for the generation of response spectra adjustable to different source-, propagation-, and site conditions. Bull Earthq Eng 12(1):467–493
Bora SS, Scherbaum F, Kuehn N, Stafford P, Edwards B (2015) Development of a response spectral ground motion prediction equation (GMPE) for seismic-hazard analysis from empirical Fourier spectral and duration models. Bull Seism Soc Am 105:2192–2218
Bora SS, Scherbaum F, Kuehn N, Stafford P (2016) On the relationship between Fourier and response spectra: Implications for the adjustment of empirical ground-motion prediction equations (GMPEs). Bull Seism Soc Am 106(3):1235–1253
Bora SS, Cotton F, Scherbaum F (2019) NGA-West2 Empirical Fourier and duration models to 7 generate adjustable response spectra. Earthq Spectra 35:61–93
Bozorgnia Y, Abrahamson NA, Atik LA, Ancheta TD, Atkinson GM, Baker JW, Baltay A, Boore DM, Campbell KW, Chiou BS-J (2014) NGA-West2 research project. Earthq Spectra 30:973–987
Brillinger DR, Preisler HK (1984) An exploratory analysis of the Joyner–Boore attenuation data. Bull Seism Soc Am 74:1441–1450
Brillinger DR, Preisler HK (1985) Further analysis of the Joyner–Boore attenuation data. Bull Seism Soc Am 75:611–614
Brune JN (1970) Tectonic stress and the spectra of seismic shear waves from earthquakes. J Geophys Res 75:4997–5009
Brune JN (1971) Correction. J Geophys Res 76:5002
Building Seismic Safety Council (BSSC) (2009) NEHRP recommended seismic provisions for new buildings and other structures: part 1, provisions, Federal Emergency Management Agency P-750, Washington, D.C.
Campbell KW, Bozorgnia Y (2014) NGA-West2 ground motion model for the average horizontal components of PGA, PGV, and 5% damped linear acceleration response spectra. Earthq Spectra 30(3):1087–1115
Campbell KW, Bozorgnia Y, Kuehn N, Gregor N (2021) An evaluation of partially non-ergodic PGA ground-motion models for Japanese megathrust earthquakes: Supplemental material. Report No. GIRS 2021-11. Natural Hazards Risk and Resiliency Research Center, The B. John Garrick Institute for the Risk Sciences, University of California, Los Angeles (November, 2021)
Campbell KW, Bozorgnia Y, Kuehn N, Gregor N (2021) An evaluation of partially non-ergodic PGA ground-motion models for Japanese megathrust earthquakes: supplemental material. Report GIRS-2021-11. B. John Garrick Institute for the Risk Sciences, University of California, Los Angeles
Campbell KW, Bozorgnia Y, Kuehn N, Gregor N (2022) An evaluation of partially nonergodic PGA ground-motion models for Japanese megathrust earthquakes. Earthq Spectra 38(4):2611–2637. https://doi.org/10.1177/87552930221104840
Chao SH, Chen YH (2019) A novel regression analysis method for randomly truncated strong-motion data. Earthq Spectra 35(2):977–1001
Chiou BSJ, Youngs RR (2014) Update of the Chiou and Youngs NGA model for the average horizontal component of peak ground motion and response spectra. Earthq Spectra 30(3):1117–1153
Chiou BSJ, Youngs RR (2008a) An NGA model for the average horizontal component of peak ground motion and response spectra. Earthq Spectra 24(1):173–215
Chiou BSJ, Youngs RR (2008b) NGA Model for the average horizontal component of peak ground motion and response spectra, PEER Report 2008/10. Pacific Earthquake Engineering Research Center, University of California, Berkeley, CA
Davatgari Tafreshi M, Bora SS, Mirzaei N, Ghofrani H, Kazemian J (2021) Spectral models for seismological source parameters, path attenuation and site-effects in Alborz region of northern Iran. Geophys J Int 227:350–367
Davatgari Tafreshi M, Bora SS, Mirzaei N, Ghofrani H, Kazemian J (2022) Region-and site-specific measurements of kappa (κ0) and associated variabilities for Iran. Bull Seism Soc Am 112(6):3046–3062
Davatgari Tafreshi M, Bora SS (2023) Empirical ground-motion models (GMMs) and associated correlations for cumulative absolute velocity, arias intensity, and significant durations calibrated on Iranian strong motion database. Bull Earthq Eng 21:4139–4166
Dawood H, Rodriguez-Marek A, Bayless J, Goulet C, Thompson S (2016) A flatfile for the KiK-net database processed using an automated protocol. Earthq Spectra 32:1281–1302
Douglas J, Edwards B (2016) Recent and future developments in earthquake ground motion estimation. Earth Sci Rev 160:203–219
Douglas J (2020) Ground motion prediction equations 1964–2020. http://www.gmpe.org.uk/. Accessed November 2022
Farajpour Z, Zare M, Pezeshk S, Ansari A, Farzanegan E (2018) Near-source strong motion database catalog for Iran. Arab J Geosci 11:1–16
Farajpour Z, Pezeshk S, Zare M (2019) A new empirical ground-motion model for Iran. Bull Seism Soc Am 109:732–744
Fukushima Y, Tanaka T (1990) A new attenuation relation for peak horizontal acceleration of strong earthquake ground motion in Japan. Bull Seism Soc Am 80(4):757–783
Fukushima Y (1997) Comment on “Ground motion attenuation relations for subduction zones.” Seismol Res Lett 68(6):947–949
Fukushima Y, Irikura K, Uetake T, Matsumoto H (2000) Characteristics of observed peak amplitude for strong ground motion from the 1995 Hyogoken Nanbu (Kobe) earthquake. Bull Seism Soc Am 90(3):545–565
Ghasemi H, Zare M, Fukushima Y, Koketsu K (2009) An empirical spectral ground-motion model for Iran. J Seismol 13:499–515
Ghodrati Amiri G, Khorasani M, Mirza Hessabi M, Razavian Amrei SA (2010) Ground motion prediction equations of spectral ordinates and Arias intensity for Iran. J Earthq Eng 14:1–29
Ghofrani H, Atkinson GM (2013) Ground-motion prediction equations for interface earthquakes of M 7 to M 9 based on empirical data from Japan. Bull Earthq Eng 12:549–571
Hamzehloo H, Mahood M (2012) Ground-motion attenuation relationship for east central Iran. Bull Seism Soc Am 102(6):2677–2684
Hanks TC, McGuire RK (1981) The character of high-frequency strong ground motion. Bull Seismol Soc Am 71(6):2071–2095
Javan-emrooz H, Eskandari-Ghadi M, Mirzaei N (2018) Prediction equations for horizontal and vertical PGA, PGV, and PGD in northern Iran using prefix gene expression programming. Bull Seismol Soc Am 108(4):2305–2332
Joyner W, Boore D (1981a) Peak horizontal acceleration and velocity from strong-motion records including records from the 1979 Imperial Valley, California, earthquake. Bull Seism Soc Am 71:2011–2038
Joyner WB, Boore DM (1981b) Peak horizontal acceleration and velocity from strong-motion records including records from the 1979 Imperial Valley, California, earthquake. Bull Seism Soc Am 71(6):2011–2038
Joyner W, Boore D (1993) Methods for regression analysis of strong motion data. Bull Seism Soc Am 83:469–487
Kaklamanos J, Baise LG (2011) Model validations and comparisons of the Next Generation Attenuation of Ground Motions (NGA-West) Project. Bull Seism Soc Am 101:160–175
Kale O, Akkar S, Ansari A, Hamzehloo H (2015) A ground-motion predictive model for Iran and Turkey for horizontal PGA, PGV, and 5%-damped response spectrum: Investigation of possible regional effects. Bull Seism Soc Am 105:963–980
Kayastha M, Pezeshk S, Tavakoli S (2023) Empirical distance metrics relationships and uncertainties in seismic hazard assessment. Bull Seismol Soc Am 113(3):1176–1191
Khademi MH (2002) Attenuation of peak and spectral accelerations in the Persian plateau. In: Proceedings of 12th European conference on earthquake engineering. pp. 330
Konno K, Ohmachi T (1998) Ground-motion characteristics estimated from spectral ratio between horizontal and vertical components of microtremor. Bull Seism Soc Am 88:228–241
Kotha SR, Bindi D, Cotton F (2016) Partially non-ergodic region specific GMPE for Europe and Middle-East. Bull Earthq Eng 14:1245–1263
Kotha SR, Bindi D, Cotton F (2022) A Regionally adaptable ground-motion model for Fourier amplitude 1 spectra of shallow crustal earthquakes in Europe. Bull Earthq Eng 1:1–30
Kuehn NM, Kishida T, AlHamaydeh M, Lavrentiadis G, Bozorgnia Y (2020) A Bayesian model for truncated regression for the estimation of empirical ground-motion models. Bull Earthq Eng 18:6149–6179
Mahdavian A (2006) Empirical evaluation of attenuation relations of peak ground acceleration in the Zagros and central Iran, Proc. of First European Conf. on Earthquake Engineering and Seismology (a joint event of the 13th ECEE & 30th General Assembly of the ESC), Geneva, Switzerland, 3–8 September, Paper Number 558
Maiti SK, Yagoda-Biran G, Kamai R (2021) A suite of alternative ground-motion models (GMMs) for Israel. Bull Seismol Soc Am 111(4):2177–2194
McGuire R (1978) A simple model for estimating Fourier amplitude spectra of horizontal ground acceleration. Bull Seismol Soc Am 68(3):803–822
Meghdadi A, Shoja-Taheri J (2014) Ground-motion attenuation and source spectral shape for earthquakes in eastern Iran. Bull Seismol Soc Am 104(2):624–633
Montejo LA, Vidot-Vega AL (2017) An empirical relationship between Fourier and response spectra using spectrum-compatible times series. Earthq Spectra 33(1):179–199
Motazedian D (2006) Region-specific key seismic parameters for earthquakes in northern Iran. Bull Seismol Soc Am 96(4A):1383–1395
Mousavi-Bafrouei SH, Babaie Mahani A (2020) A comprehensive earthquake catalogue for the Iranian Plateau (400 B.C. to December 31, 2018). J Seismol 24:709–724
Mousavi M, Zafarani H, Noorzad A, Ansari A, Bargi K (2007) Analysis of Iranian strong-motion data using the specific barrier model. J Geophys Eng 4(4):415–428
Nowroozi AA (2005) Attenuation relations for peak horizontal and vertical accelerations of earthquake ground motion in Iran: A preliminary analysis. J Seismol Earthq Eng 7(2):109–128
Ramazi HR, Schenk V (1994) Preliminary results obtained from strong ground motion analyses of Iranian earthquakes. In: Proceedings of the XXIV General Assembly of the European Seismological Commission, III, Athens, Greece, 19–24 September, pp 1762–1770
Restrepo-Velez LF, Bommer JJ (2003) An exploration of the nature of the scatter in ground-motion prediction equations and the implications for seismic hazard assessment. J Earthq Eng 7:171–199
Rodriguez-Marek A, Rathje EM, Bommer JJ, Scherbaum F, Stafford PJ (2014) Application of single-station sigma and site-response characterization in a probabilistic seismic-hazard analysis for a new nuclear site. Bull Seismol Soc Am 104(4):1601–1619
Sadeghi H, Shooshtari A, Jaladat M (2010) Prediction of horizontal response spectra of strong ground motions in Iran and its regions. In: Proceedings of the ninth U.S. national and 10th Canadian conference on earthquake engineering: reaching beyond borders, Toronto, Canada, 25–29 July, Paper Number 861
Saffari H, Kuwata Y, Takada S, Mahdavian A (2012) Updated PGA, PGV, and spectral acceleration attenuation relations for Iran. Earthq Spectra 28(1):257–276
Sedaghati F, Pezeshk S (2016a) Comparative study on parameter estimation methods for attenuation relationships. J Geophys Eng 13(6):912–927
Sedaghati F, Pezeshk S (2016b) Estimation of the coda-wave attenuation and geometrical spreading in the New Madrid seismic zone. Bull Seismol Soc Am 106(4):1482–1498
Sedaghati F, Pezeshk S (2017) Partially non-ergodic empirical ground motion models for predicting horizontal and vertical PGV, PGA, and 5% damped linear acceleration response spectra using data from the Iranian plateau. Bull Seismol Soc Am 107(2):934–948
Shahvar MP, Farzanegan E, Eshaghi A, Mirzaei H (2021) I1-net: The Iran strong motion network. Bull Seismol Soc Am 92(4):2100–2108
Soghrat MR, Khaji N, Zafarani H (2012) Simulation of strong ground motion in northern Iran using the specific barrier model. Geophys J Int 188(2):645–679
Sokolov V, Loh CH, Wen KL (2000) Empirical model for estimating Fourier amplitude spectra of ground acceleration in Taiwan region. Earthq Eng Struct Dyn 29:339–357
Stafford PJ (2006) Engineering seismological studies and seismic design criteria for the Buller region.. Ph.D. Thesis. University of Canterbury, South Island, New Zealand
Stafford PJ, Berill J, Pettinga J (2006) New empirical equations for the Fourier amplitude spectrum of acceleration and Arias intensity in New Zealand. In: Proceedings of first European conference on earthquake engineering and seismology
Stafford PJ (2014) Application of single-station sigma and site-response characterization in a probabilistic seismic-hazard analysis for a new nuclear site. Bull Seismol Soc Am 104:1601–1619
Stafford PJ, Rodriguez-Marek A, Edwards B, Kruiver PP, Bommer JJ (2017) Scenario dependence of linear site effect factors for short-period response spectral ordinates. Bull Seismol Soc Am 107(6):2859–2872
Strasser FO, Abrahamson NA, Bommer JJ (2009) Sigma: issues, insights and challenges. Seismol Res Lett 80(1):40–54
Tavakoli B, Sedaghati F, Pezeshk S (2018) An analytical effective point-source-nased distance-conversion approach to mimic the effects of extended faults on seismic hazard assessment. Bull Seismol Soc Am 108(2):742–760
Trifunac MD (1976) Preliminary empirical model for scaling Fourier amplitude spectra of strong ground acceleration in terms of earthquake magnitude, source-to-site distance, and recording site conditions. Bull Seismol Soc Am 66(4):1343–1373
Villani M, Abrahamson NA (2015) Repeatable site and path effects on the ground-motion sigma based on empirical data from southern California and simulated waveforms from the CyberShake platform. Bull Seismol Soc Am 105(5):2681–2695
Zafarani H, Hassani B (2013) Site response and source spectra of S waves in the Zagros region, Iran. J Seismol 17:645–666
Zafarani H, Luzi L, Lanzano G, Soghrat MR (2018a) Empirical equations for the prediction of PGA and pseudo spectral accelerations using Iranian strong-motion data. J Seismol 22(1):263–285
Zare M, Ghafory-Ashtiany M, Bard P-Y (1999) Attenuation law for the strong motions in Iran. In: Proceedings of the third international conference on seismology and earthquake engineering, Tehran, Iran. vol 1, pp 345–354
Zare M, Sabzali S (2006) Spectral attenuation of strong motions in Iran. In: Proceedings of third international symposium on the effects of surface geology on seismic motion, Grenoble, France, 30 August–1 September, vol 1, Paper Number 146, pp 749–758
Zhao JX, Lu M (2011) Magnitude-scaling rate in ground-motion prediction equations for response spectra from large, shallow crustal earthquakes. Bull Seismol Soc Am 101(6):2643–2661
Zolfaghari M, Darzi A (2019) A prediction model for vertical-to-horizontal ratios of PGA, PGV, and 5%-damped response spectra (0.01–10 s) for Iran. J Seismol 23:819–837
Zafarani H, Mousavi M, Noorzad AS, Ansari A (2008) Calibration of the specific barrier model to Iranian plateau earthquakes and development of physically based attenuation relationships for Iran. Soil Dyn Earthq Eng 28(7):550–576
Zafarani H, Noorzad A, Ansari A, Bargi K (2009) Stochastic modeling of Iranian earthquakes and estimation of ground motion for future earthquakes in Greater Tehran. Soil Dyn Earthq Eng 29(4):722–774
Zafarani H, Soghrat MR (2012) Simulation of ground motion in the Zagros region of Iran using the specific barrier model and the stochastic method. Bull Seismol Soc Am 102(5):2031–2045
Zafarani H, Soghrat MR (2017) A selected dataset of the Iranian strong motion records. Nat Hazards 86:1307–1332
Zafarani H, Luzi L, Lanzano G, Soghrat MR (2018b) Empirical equations for the prediction of PGA and pseudo spectral accelerations using Iranian strong-motion data. J Seismolog 22:263–285
Zafarani H, Soghrat MR (2022) Ground motion models for non-spectral intensity measures based on the Iranian database. J Earthq Eng 27:3786–3806
Zafarani H, Soghrat MR (2023) An empirical spectral ground-motion model for iran using truncated iranian strong-motion database enriched by near-field records. J Earthq Eng 28:922–945
Acknowledgements
The authors thank the Building and Housing Research Center of Iran for their generous provision of the data used in this work. The authors thank Editor-in-Chief Atilla Ansal, the Associate Editor and the anonymous reviewer for their constructive reviews of this paper.
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors acknowledge that there are no conflicts of interest recorded.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Davatgari-Tafreshi, M., Pezeshk, S. & Bora, S.S. Empirical models for Fourier amplitude spectrum of ground-motion calibrated on data from the Iranian plateau. Bull Earthquake Eng 22, 3845–3874 (2024). https://doi.org/10.1007/s10518-024-01876-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-024-01876-2