
Abstract
We present a mathematical bioeconomic model of a fishery with a variable price. The model describes the time evolution of the resource, the fishing effort and the price which is assumed to vary with respect to supply and demand. The supply is the instantaneous catch while the demand function is assumed to be a monotone decreasing function of price. We show that a generic market price equation (MPE) can be derived and has to be solved to calculate non trivial equilibria of the model. This MPE can have 1, 2 or 3 equilibria. We perform the analysis of local and global stability of equilibria. The MPE is extended to two cases: an age-structured fish population and a fishery with storage of the resource.




Similar content being viewed by others

References
Auger P, Mchich R, Raïssi N, Kooi B (2010) Effects of market price on the dynamics of a spatial fishery model: over-exploited fishery/traditional fishery. Ecol Complex 7:13–20
Auger P, Bravo de la Parra R (2000) Methods of aggregation of variables in population dynamics. C R Acad Sci 323:665–674
Auger P, Ducrot A (2009) A model of fishery with fish stock involving delay equations. Philos Trans R Soc A 367:4907–4922
Auger P, Bravo de la Parra R, Poggiale JC, Sánchez E, Nguyen-Huu T (2008) Aggregation of variables and applications to population dynamics. In: Magal P, Ruan S (eds) Structured population models in biology and epidemiology. Lecture notes in mathematics, Vol. 1936, Mathematical Biosciences Subseries, Springer, Berlin, pp 209–263
Auger P, Lett C, Moussaoui A, Pioch S (2010) Optimal number of sites in artificial pelagic multi-site fisheries. Can J Fish Aquat Sci 67:296–303
Barbier EB, Strand I, Sathirathai S (2002) Do open access conditions affect the valuation of an externality? Estimating the welfare effects of mangrove-fishery linkages. Env Resour Econ 21:343–367
Boudouresque CF, Gadiou G, Le Direac’h L (2005) Marine protected areas: a tool for costal areas management. In: Levner E, Linkov I, Proth JM (eds) Strategic management of marine Ecosystems. Springer, Dordrecht, pp 29–52
Clark CW (1990) Mathematical bioeconomics: the optimal management of renewable resources, 2nd edn. Wiley, New York
Clark CW (1985) Bioeconomic modelling and fisheries management. Wiley, New York
Clark CW (2006) Fisheries bioeconomics: why is it so widely misunderstood? Popul Ecol 48(2):95–98
De Lara M, Doyen L (2008) Sustainable management of renewable resources: mathematical models and methods. Springer, Berlin
Doyen L, Cissé A, Gourguet S, Mouysset L, Hardy PY, Béné C, Blanchard F, Jiguet F, Pereau JC, Thébaud O (2013) Ecological-economic modelling for the sustainable management of biodiversity. Comput Manag Sci 10(4):353–364
Ekouala L (2013) Le développement durable et le secteur des pêches et de l’aquaculture au Gabon: une étude de la gestion durable des ressources halieutiques et de leur écosystème dans les provinces de l’Estuaire et de l’Ogoué Maritime. PhD Thesis, Université du Littoral Côte d’Opale
Iwasa Y, Andreasen V, Levin SA (1987) Aggregation in model ecosystems. I. Perfect aggregation. Ecol Model 37:287–302
Iwasa Y, Levin SA, Andreasen V (1989) Aggregation in model ecosystems. II. Approximate aggregation. IMA J Math Appl Med Biol 6:1–23
Lafrance JT (1985) Linear demand functions in theory and practice. J Econ Theory 37:147–166
Mankiw NG (2011) Principles of economics, 5th edn. South-Western Cengage Learning, Boston
Ly S, Mansal F, Balde M, Nguyen-Huu T, Auger P (2014) A model of a multi-site fishery with variable price: from over-exploitation to sustainable fisheries. Mathematical Modelling of Natural Phenomena (in press)
Meuriot E (1987) Les modèles bio-économiques d’exploitation des pêcheries. Démarches et enseignements. Rapports économiques et juridiques de l’IFREMER N 4
Moussaoui A, Auger P, Lett C (2011) Optimal number of sites in multi-site fisheries with fish stock dependent migrations. Math Biosci Eng 8:769–783
Prellezo R, Accadia P, Andersen JL, Andersen BS, Buisman E, Little A, Nielsen JR, Poos JJ, Powell J, Rockmann C (2012) A review of EU bio-economic models for fisheries: the value of a diversity of models. Mar Policy 36:423–431
Robert M, Dagorn L, Filmalter JD, Deneubourg JL, Itano D, Holland K (2013) Intra-individual behavioral variability displayed by tuna at fish aggregating devices (FADs). Mar Ecol-Prog Ser (in press)
Randall JE (1963) An analysis of the fish populations of artificial and natural reefs in the virgin islands. Caribb J Sci 3(1):31–47
Robert M, Dagorn L, Lopez J, Moreno G, Deneubourg JLA (2013) Does social behavior influence the dynamics of aggregations formed by tropical tunas around floating objects ? An experimental approach. J Exp Mar Biol Ecol 440:238–243
Smith VL (1968) Economics of production from natural resources. Am Econ Rev 58(3):409–431
Smith VL (1969) On models of commercial fishing. J Polit Econ 77(2):181–198
Sow FN, Thiam N, Samb B (2011) Diagnostic de l’état d’exploitation du stock de mérou Epinephelus aeneus(Geoffroy St. Hilaire, 1809) au Sénégal par l’utilisation des fréquences des tailles. J Sci Hal Aquat 3:82–88
Walras L (1874) Éléments d’économie Politique Pure. Corbaz, Lausanne
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Existence Domains for Non-trivial Equilibria (Positive Equilibria)
We determine existence domains for positive equilibria of system (1). Non-trivial equilibria correspond to the solutions of the equation
which can be rewritten
where \(f(p)=\frac{rc}{pq}\left( 1- \frac{c}{pqk}\right)\). Solutions correspond to the roots of third degree polynomial
Because two consecutive coefficients of \(P_\alpha\) have opposite signs, real roots are all positive. An equilibrium \(\xi ^*\) is then positive if and only if \(p^*qk > c\), because \(p^*qk < c\) implies \(E^*<0\).
Lemma 1
There is a positive equilibrium \(\xi ^*\) such that \(p^*qk<c\) if and only if \(\alpha > qkA/c\). If \(p^*\) exists, it is the unique real root of (10).
Proof
\(D\) is decreasing, so for \(p<c/qk\), \(D(p)>D(c/qk)\). If \(\alpha \le qkA/c\), \(D(c/qk)>0\). Then for \(p<c/qk\), \(D(p)>0\) and \(f(p)<0\). There is no root \(p^*\) such that \(p^*qk<c\). On the other hand, if \(\alpha > qkA/c\), then \(D(c/qk)<0\). We have the following properties:
-
\(D(0)>0>\lim \limits _{p\rightarrow 0} f(p)\);
-
if \(p>c/qk\), \(D(p)<0<f(p)\);
-
\(D\) is monotonously decreasing, while \(f\) is monotonously increasing on \((0,c/qk]\).
We deduce that there exists a unique \(p^*\) which verifies \(D(p^*)=f(p^*)\). It also verifies \(p^* <c/qk\).\(\square\)
As a consequence, when \(\alpha > qkA/c\), there is no positive equilibrium.
We now determine the existence domains of real roots of polynomial \(P_\alpha\):
Lemma 2
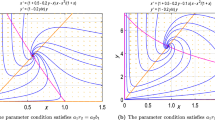
If \(kr<3A\), there is always one real root. If \(kr>3A\), there are three domains:
-
\(\alpha < \alpha ^-\): there is one and only one real root;
-
\(\alpha ^- < \alpha < \alpha ^+\) : there are three real roots;
-
\(\alpha ^+ < \alpha\) : there is one and only one real root;
\(\alpha ^-\) and \(\alpha ^+\) correspond to values for which two real roots merge and vanish, and verify
Proof
The discriminant \(\Delta _\alpha\) of polynomial \(P_\alpha\) (10) is given by
where the resultant \(R\left( P_\alpha ,P_\alpha '\right)\) of polynomials \(P_\alpha\) and its derivated polynomial reads:
where \(g(\alpha )=27\alpha ^2rc^2-18\alpha qrcAk-q^2A^2k^2r+4q^2A^3k+4r^2ck^2q\alpha\). \(g\) is a degree 2 polynomial with two roots, \(\alpha ^-\) and \(\alpha ^+\).
-
If \(kr<3A\), \(g\) has no real roots. We deduce that \(\forall \alpha >0\), \(g(\alpha )>0\), and \(\Delta _\alpha <0\). \(P_\alpha\) has exactly one real root.
-
If \(kr>3A\), for \(\alpha <\alpha ^-\) or \(\alpha >\alpha ^+\), \(g(\alpha )>0\). \(P_\alpha\) has exactly one real root. for \(\alpha ^-<\alpha <\alpha ^+\), \(g(\alpha )<0\). \(P_\alpha\) has exactly three real root. For \(\alpha = \alpha ^-\) or \(\alpha = \alpha ^+\), \(\Delta _\alpha = 0\), \(P_\alpha\) has real roots with order of multiplicity larger than 1.
\(\square\)
Appendix 2: Local Stability Positive Equilibria \(\xi ^*\)
We now determine the stability of positive equilibria of system (1). Let us denote
Lemma 3
If \(A>rk/3\), the positive equilibrium \(\xi ^*\) is locally asymptotically stable. If \(A<rk/3\) , the positive equilibrium \(\xi ^*\) is locally asymptotically stable if and only if \(p^*<p^-\) or \(p^*>p^+\).
Proof
The jacobian matrix of system corresponding to positive equilibria reads:
The characteristic polynomial is:
We now determine the local stability by using Routh-Hurwitz criterion. Let us denote
Equilibrium \(\xi ^*\) is stable if and only if \((i)\) \(a_i > 0\) for \(i\in \{0,\dots ,3\}\) and \((ii)\) \(a_2a_1 > a_3a_0\). If \(\xi ^*\) is positive, conditions \(a_3 > 0\), \(a_2 > 0\), \(a_1 > 0\) are always verified. We now determine if condition \((ii)\) is satisfied:
If \(\xi ^*\) is positive, condition \((ii)\) is always verified. We now determine the sign of \(a_0\). By replacing \(n^*\) and \(E^*\) by their values, we obtain
Since \(p^*\) is a root of polynomial (10), we have
If \(A>rk/3\), polynomial \((Aq^2k)p^{*2}-2(rcqk)p^*+3rc^2\) has no real roots and is always positive. If \(A<rk/3\), polynomial \((Aq^2k)p^{*2}-2(rcqk)p^*+3rc^2\) has two roots: \(p^-\) and \(p^+\). Since \(\xi ^*\) is positive, \(p^*qk>c\). We deduce that \(a_0>0\) if and only if \(p<p^-\) or \(p>p^+\). \(\square\)
Lemma 4
\(p^-\) (resp. \(p^+\) ) is the double root of polynomial \(P_{\alpha ^+}\) (resp. \(P_{\alpha ^-}\) ).
Proof
From Cardano’s formula, we find that double root of polynomial \(P_{\alpha ^+}\) reads:
By simplifying the expression, we obtain that the double root is equal to \(p^-\). The same results holds for \(P_{\alpha ^-}\) and \(p ^+\). \(\square\)
Appendix 3: Bounded Attractor
We now show that there exists a bounded set in which every trajectories (for system (1)) with a positive initial condition end. It is clear that the set \(\varOmega _0\) of the phase space \((n,E,p)\) defined by
is a forward invariant set for system (1). Furthermore, any trajectory with a positive initial condition has its \(\omega\)-limit in \(\varOmega _0\).
Let us consider the candidate Lyapunov function defined for \(n\in \mathbb {R}_+^*\), \(E\in \mathbb {R}_+^*\), \(p\in \mathbb {R}\):
Along the trajectories of system (1), we have
Note that \(\dot{V}(n,E,p)\) does not depend on \(p\).
Lemma 5
The set \(\varOmega = \{(n,E,p)\;|\; (n,E,p)\in \varOmega _0, \dot{V}(n,E,p)\ge 0\}\) is included in the set \(\varSigma \times (-\infty ,A/\alpha ]\), where \(\varSigma\) is a compact subset of \((0,k]\times \mathbb {R_+^*} \cup \{(k,0)\}\).
Proof
For \(E>1\), \(\dot{V}(n,E,p) < n \left( \varphi q A + \frac{r}{k}\left( r-qE\right) \ln E\right)\). The right term tends toward \(-\infty\) when \(E\) tends toward \(+\infty\). We denote
where \(E_{min}\) is such that \(\left( \varphi q A + \frac{r}{k}\left( r-qE_{min}\right) \ln E_{min}\right) <0\). We deduce that
For \(E<1\), \(\dot{V}(n,E,p) < n\left( \varphi q A + \frac{r}{k}\left( r\left( 1-\frac{n}{k}\right) -qE \right) \ln E \right)\). We have
where \(f(E) = \frac{k^2\varphi q A}{r^2\ln E} + \frac{k(r-qE)}{r}\). It is easy to see that \(f\) is defined on \((0,1)\) and monotonously decreasing, with \(\lim \limits _{E\rightarrow 0}f(E)= k\) and \(\lim \limits _{E\rightarrow 1}f(E)=-\infty\). We denote \(\varSigma _1=\{(n,E)\;|\;0\le n \le k, 0 \le E < f^{-1}(n)\}\). Equation (25) now reads
Let us consider \(E'_{min}=f^{-1}(k/2)\). On the compact set \([0,k/2]\times [E'_{min},E_{min}]\), term \(\varphi q A + \frac{r}{k}\left( r\left( 1-\frac{n}{k}\right) -qE \right) \ln E-\varphi q^2 nE\) has a maximum \(M\).
Let us denote \(\varSigma _2=[0,\alpha \varphi c/M)\times [E'_{min},E_{min}]\). From Eq. (22), we deduce that
We now define \(\varSigma = ([0,k]\times \mathbb {R^+})\backslash (\varSigma _1 \cup \varSigma _2 \cup \varSigma _3)\). \(\varSigma\), \(\varSigma _0\), \(\varSigma _1\) and \(\varSigma _2\) are represented in Fig. 5. \(\varSigma\) is a compact subset of \((0,k]\times \mathbb {R_+^*} \cup \{(k,0)\}\). Furthermore, \(\dot{V}(n,E,p) \ge 0 \Rightarrow (n,E)\in \varSigma\). We deduce that \(\varOmega\) is included in \(\varSigma \times (-\infty ,A/\alpha ]\). \(\square\)

\(\dot{V}(n,E,p)\) (black wireframe surface). The white part of the plan \({\dot{V}}=0\) represents the compact set which encompasses the set \(\{(n,E)\;|\;\dot{V}>0\}\). Sets \(\varSigma\) and \(\varSigma _i\) for \(i= 1\dots 3\) are represented as grey areas. Parameters are \(r=0.9\), \(k=3\), \(q=0.1\), \(c=2\), \(A=2\), \(\alpha =0.1\) and \(\varphi = 0.1\)
Lemma 6
In set \(\varOmega\), \(V\) admits a maximum \(V_0\).
Proof
Since \(\varSigma\) is a compact set, \(V(n,E,A/\alpha )\) admits a maximum \(V_0\) on \(\varSigma\). From Eq. (21), we deduce that \(\forall (n,E,p) \in \varOmega\), \(V(n,E,p)\le V(n,E,A/\alpha )\), hence the result. \(\square\)
Let be \(V'_0 \ge V_0\), \(\varOmega _{\infty } = \{(n,E,p)\;|\;V(n,E,p)\le V'_0\}\), and \(\varOmega _\infty ^+ = \{(n,E,p)\;|\;(n,E,p)\in \varOmega _\infty , p\ge 0\}\). We now consider the flow \(\phi\) associated to system (1).
Lemma 7
\(\varOmega _\infty\) is forward invariant, and for all \((n,E,p) \in \varOmega _0\) , there exists \(t\ge 0\) such that \(\phi _t(n,E,p) \in \varOmega _\infty ^+\).
Proof
For \((n,E,p)\in \varOmega _0 \backslash \varOmega _\infty\), \(V(n,E,p) > V_0\) and \(\dot{V}(n,E,p) < 0\), which means that \(\varOmega _\infty\) is forward invariant. Furthermore, it is clear that \(\lim \limits _{t\rightarrow +\infty } V(\phi _t(n,E,p))\le V_0\), which means that there exists \(t_0\) such that \(\phi _{t_0}(n,E,p)\in \varOmega _\infty\).
We now show that there exists \(t'_0\) such that \(\phi _{t'_0}(n,E,p)\in \varOmega _\infty ^+\). From system (1), we deduce that if \(p < 0\), \(\dot{E} \le -cE\), and if \(p<0\) and \(E < A/(2kq)\), \(\dot{p}>A/2\). Let us consider \((n,E,p) \in \varOmega _\infty\), and the solution \((n(t),E(t),p(t))=\phi _t(n,E,p)\). We suppose that \(\forall t>0\), \(p(t)<0\). There exists \(t_1\) such that \(\forall t>t_1\), \(E(t_1)<A/(2kq)\). Then for \(t>t_1\), \(\dot{p}(t)> A/2\), and \(\lim \limits _{t\rightarrow +\infty }p(t) >0\), hence the contradiction. We deduce that there exists \(t'_0\ge 0\) such that \(p\ge 0\). Since \((n,E,p)\in \varOmega _\infty\) and \(\varOmega _\infty\) is forward invariant, \(\phi _{t'_0}(n,E,p) \in \varOmega _\infty ^+\), which ends the proof. \(\square\)
We can now prove Theorem 3.
Theorem 3
There exists a bounded set \(\varOmega _\infty ^{++}\) included in \(\varOmega _0\) which is forward invariant and such that \(\forall (n,E,p), \left\{ t \ge 0 \;|\; \{\phi _t(n,E,p)\}\cap \varOmega _\infty ^{++} \ne \emptyset \right\}\).
Proof
It is easy to deduce from Eq. (21) that \(\varOmega _\infty ^{+}\) is a compact set. This is illustrated on Fig. 6.
Let us denote \(E_M = \max \{E\;|\;(n,E,0) \in \varOmega _\infty \}\).
For \((n,E,p) \in \varOmega _\infty ^{+}\), we consider the solution \((n(t),E(t),p(t))=\phi _t(n,E,p)\). Let us define \(t_m = \inf \{t> 0\;|\;p(t) < 0\}\) and \(t_M = \inf \{t> t_m\;|\;p(t) > 0\}\) (\(t_m\) and \(t_M\) can be equal to \(+\infty\)). If \(t_m = +\infty\), we denote \(p_{inf}(n,E,p)=0\), else we denote \(p_{inf}(n,E) = \inf \limits _{t\in (t_m,t_M)}p(t)\). This represents the minimal value of \(p\) that is reachable when crossing the plan \(p=0\) before returning to \(\varOmega _\infty ^{+}\). If \(t_m < +\infty\), then \(\dot{p}(t_m) \le 0\). For all \(t\in (t_m,t_M)\), \(\dot{E}(t)\le -cE(t)\), and so \(E(t) \le E(t_m) e^{-ct}\le E_M e^{-ct}\). Then we have \(\dot{p}(t) \ge A - qkE(t) \ge A - qkE_Me^{-ct}\). We deduce that \(p(t)\) reaches its minimum before \(t'=\ln \left( A/qkE_M\right) /c\). If we denote \(p_m =\int _0^{t'} \left( A - qkE_Me^{-ct}\right) dt\), then \(p_{inf}(n,E,p)\ge p_m\).
We now define \(\varOmega _\infty ^{++}= \{(n,E,p)\in \varOmega _\infty | p \ge p_m\}\). It is clear that \(\varOmega _\infty ^{++}\) is bounded, and from the previous demonstration, we deduce that it is forward invariant. since \(\varOmega _\infty ^+\) is included in \(\varOmega _\infty ^{++}\), we deduce from Lemma (7) that \(\forall (n,E,p), \left\{ t \ge 0 \;|\; \{\phi _t(n,E,p)\}\cap \varOmega _\infty ^{++} \ne \emptyset \right\}\). \(\square\)

On the surface shown, \(V(n,E,p)\) is constant. The space under the surface corresponds to \(\varOmega _\infty\). The compact set \(\varOmega _\infty ^{+}\) corresponds to the space under the surface and over the plan \(p=0\). Parameters are \(r=0.9\), \(k=3\), \(q=0.1\), \(c=2\), \(A=2\), \(\alpha =0.1\) and \(\varphi = 0.1\)
Rights and permissions
About this article

Cite this article
Mansal, F., Nguyen-Huu, T., Auger, P. et al. A Mathematical Model of a Fishery with Variable Market Price: Sustainable Fishery/Over-exploitation. Acta Biotheor 62, 305–323 (2014). https://doi.org/10.1007/s10441-014-9227-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10441-014-9227-7