Abstract
Camera traps are commonly used to monitor and study wild animals in their natural habitat, with minimal disturbance. Several investigations have shown that the natural markings of animals for some species can be used for individual recognition. However, most commercially available cameras are unable to obtain photos of sufficient quality to highlight these features. Our study further exemplifies the use of applying an external lens to a camera, to obtain higher quality images. We tested various lenses and their ability to record the scale patterns on Eurasian beaver (Castor fiber) tails, for individual identification. We tested eleven different commercially available camera trap models, across six different beaver territories in the Districts of Kleve and Wesel (North Rhine-Westphalia, Germany). The use of an external lens, attached to the camera, produced the best quality pictures for reliable identification of individual beavers based on the scale patterns on their tales. These results further exemplify the application of external lenses for improving image quality for individual recognition which has potential applications for other species.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Camera traps are a commonly used in ecological field work to obtain and collect several types of data from wild animal populations (Deutsch 2015; Gamble et al. 2008; Lahiri et al. 2011). Compared to other known methods, such as radio-telemetry or mark-recapture techniques, where animals have to be captured (Briggs et al. 2021; Deutsch 2015), camera trapping is a less stressful and more cost-effective method (Ravela and Gamble 2004; Jean et al. 2010; Arjo et al. 2008; Costa 1993; Association For The Study Of Animal Behaviour/Animal Society Behaviour (ASAB/ASB) 2012; Gamble et al. 2008). Camera traps minimize fear, stress, or lasting harm to individual animals and populations and are therefore considered a non-invasive technique for identifying and monitoring individual animals (ASAB/ASB 2012). Furthermore, camera trapping is highly cost effective when compared to research that requires extensive field effort (i.e. live trapping) when studying species abundance, density, distribution and activity (Bondi et al. 2010; Gracanin and Mikac 2022; Welbourne et al. 2020).
For studies that aim to estimate population size, density or home ranges using camera traps, several statistical approaches are available (Gracanin et al. 2022; Green et al. 2020; Rovero and Marshall 2009; Rowcliffe et al. 2008). The most common method is capture-mark-recapture; however this requires individuals to be physically marked (Jung et al. 2020) or have natural unique markings (e.g. jaguars, tigers) (Karanth 1995; Sharma et al. 2010; Wang and Macdonald 2009).
Many animals show natural, physical characteristics or patterns that are stable and do not change further during their lifetime (e.g. cheetahs, zebras) (Kelly 2001; Lahiri et al. 2011). Camera traps can therefore be used with such species to identify individuals (Jean et al. 2010; Ardovini et al. 2007). Photo-identification of individuals has been shown to be possible in marine mammals using biological features such as pigmentation patterns or the shape of fins (Wells and Scott 1990; Urian et al. 2015; Hillman et al. 2003; Hill 2005). It is possible to recognize individual elephants (Loxodonta spp.) by the shape and distribution of nicks present in their ears (Ardovini et al. 2007). Serengeti Cheetahs (Acinonyx jubatus) and two species of Zebras (Equus grevyi and E. quagga) show specific patterns in their coats which are unique to each animal (Kelly 2001); (Lahiri et al. 2011). Camera traps have identified animals in many other taxa, including birds (Spheniscus demersus) (Tilo and Neill 2007), amphibians (Ambystoma opacum) (Ravela and Gamble 2004), and sea turtles (Caretta caretta, Chelonia mydas, Eretmochelys imbricata) (Tilo and Neill 2007); Jean et al. 2010, (Ravela and Gamble 2004; Schofield et al. 2020; Jean et al. 2010). Camera traps have even enabled the identification of mammalian species which lack unique markings, e.g. brown bears (Ursus arctos) by using deep learning approaches for facial recognition (Clapham et al. 2020; Ferreira et al. 2020).
However, the main problem for identifying animals individually by using pictures taken by camera traps is to obtain photos of sufficient quality to highlight the distinguishing natural markings and patterns. Previous studies have shown that the results are highly dependent on the image quality, which is often influenced by lighting, background or the distance from the camera trap to the animal (Clapham et al. 2020). A number of studies have utilized either external (Gracanin et al. 2018; Littlewood et al. 2021; Mos and Hofmeester 2020) or internal lenses (McCleery et al. 2014; Uhe et al. 2020) to adjust the focal distance between the camera and the subject matter. By doing so, features are recorded in focus, at a greater resolution, allowing researchers to perform confident identification of individuals within a species based on either natural markings (Bradfield 2004; Karanth 1995; Kelly 2001; Hiby et al. 2009), physical tags or notches (Briggs et al. 2021; Jung et al. 2020; Ranheim et al. 2004; Robstad et al. 2021) or natural scars (Ardovini et al. 2007; Hillman et al. 2003). The application of such a camera trapping methodology has great potential for a number of small to medium sized species (De Bondi et al. 2010; Gracanin et al. 2018; Uhe et al. 2020).
One species that benefits greatly from camera trap monitoring is the Eurasian beaver (Castor fiber), which is a strictly protected rodent species. Its population is growing across Europe, due to successful reintroductions (Schwab 2002; Bräsecke and Bünning 2005; Halley et al. 2012; Nolet and Rosell 1998; Schwab and Schmidbauer 2003; Swinnen et al. 2017; Halley et al. 2021). It is therefore of great interest in the course of monitoring to determine the precise number of animals at different locations and to monitor their patterns of spread. This is best achieved through individual recognition of animals. Several methods have been used in previous studies to identify beavers: PIT tags, GPS tags, ear tags, modified VHF-ear tags for the tail, neck radio collars, or even backpack harnesses (Arjo et al. 2008; Briggs et al. 2021; Mayer et al. 2019; Mayer et al. 2020). In addition to these, invasive methods such as intraperitoneal radio transmitters have also been used to identify the animals individually (Ranheim et al. 2004; Smith et al. 2016). However, even if trained personnel carry out these techniques, studies have revealed that these methods can have a negative impact on the animals. Especially the body mass of beavers decreases with the number of captures during the tagging period (Mortensen and Rosell 2020; Robstad et al. 2021). In addition, the use of anaesthetics always carries the risk that animals may die during the procedure (Ranheim et al. 2004).
In some cases, natural tail wounds and scars can be used to identify beavers individually, but not all beavers exhibit this. Younger animals in particular do not exhibit wounds or scars, making it impossible to identify them individually in this way (Mayer et al. 2019; Mayer et al. 2020; Schwaiger and Schwemmer 2012). In addition, the tail width and length and a tail fat index have been used for classifying age-classes. Rosell et al. (2010) showed that the size of the tails of North American beavers (C. canadensis) does not increase during the summer for adults and decreases by 6% during the winter and that changes in the size of the tail differ among years and families (Smith and Jenkins 1997). It is quite likely that the same applies to tails of the Eurasian beavers. Consequently, the beaver’s tail appears to be an interesting natural trait for individual identification. A study of individual identification of deceased beavers by their tail using images taken by single-lens reflex camera (SLR) showed 100% accuracy in identification (Hinds et al. unpublished). Another study also demonstrated the identification of 29 individual beavers by scars and notches in their tails using commercially available camera traps (Schwaiger and Schwemmer 2012). However, the quality of the images taken by camera traps proved to be a major challenge in the latter study, in particular if beavers were to be identified individually by the pattern of their tails and not by scars and notches.
While most studies using changes in focal length of camera traps have focused on patterns in fur (Kelly 2001; Wang and Macdonald 2009), or patterns in facial features such as ears (Ardovini et al. 2007), there has been limited application for capturing scale patterns on the tails of beavers. Given the great potential for monitoring beavers using camera traps, further investigation into individual level monitoring is needed. Our study focused on the tails of the Eurasian Beaver (Castor fiber) in which patterns of scales can be seen. This study compared eleven ordinary camera traps with a modified external lens to individually identify beavers by the scale patterns on their tails. As different camera models had varying resolution, auto-exposure features and focal lengths, we aimed to create a standardized method for targeted monitoring of beaver tails. To do this, we tested different camera models and recording heights, to identify the optimal method for obtaining sharp images of beaver tails.
Methods and materials
Study area
Photos of beaver tails were taken from July 2018 to February 2021 at five locations (Fig. 1a–e) in the district of Kleve and one location (Fig. 1f) in the district of Wesel, both located in North Rhine-Westphalia, Germany. All six locations are occupied Eurasian beaver territories. Previous evidence that the areas were occupied by beavers took the form of feeding marks and direct sightings of animals. Three of the locations (Fig. 1c-e) are in nature reserves, two on private fishing (Fig. 1a, f) waters and one location is in a public area (Fig. 1b).

The study area. Points a–e are the locations of the cameras in the district of Kleve. Point f is the location of the camera in the district of Wesel. Both districts are in North Rhine-Westphalia, Germany.
Camera traps
To take suitable photos of beaver tails, eleven cameras of six different commercially available models of various price levels were tested. The cameras were categorized by their purchase price into: low, middle, and high class (Table 1). Two camera models were assigned to the lower class: “Docooler HC-300 M” (L1) and “Maginon WK 4 HD” (L2). Three models were tested in the middle class: “Doerr SnapShot Pro” (M1), “Secacam Home Vista” (M2) and “Bushnell Trophy Cam HD” (M3). Only one camera model was assigned to the high class: “Reconyx Hyperfire HC 600” (H1) (Table 1).
As expected from the different price classes, the cameras tested were of different qualities, as well as of different properties (Appendix 1). As an energy source, the commercially available batteries in the size AA and the strength 1.5 V were used for all of the cameras. To save the recorded images, SD cards in sizes from 4 to 32 GB were used. The cameras differ in terms of the number of their illumination sources, from 32 LED lights up to 56 LED lights. The resolution of the cameras can be set to between 3 and 12 megapixels (Appendix 1). However, the highest possible resolution of the respective camera was always used. The flash range is up to 25 m and the PIR sensor even up to 30 m, depending on the camera model. The detection angle of the tested cameras was from 42° up to 120°. Another difference between the individual cameras was the trigger speed; this ranged from 0.2 s up to 1.1 s. Images were stored in JPG format. Additionally, the sensitivity of the PIR sensor was set at the highest level. The number of pictures taken by a trigger within 0.2 to 1.1 s was set between 3 to 9 pictures (Appendix 1). Except for the low-class camera model 1 (L1), all tested camera models could be configured in the field. To configure the L1, software had to be downloaded and used with a laptop to program the camera’s settings. Consequently, it was not possible to configure this camera on site.
Experimental setup
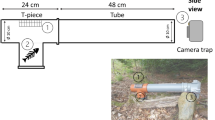
The cameras were hung from a wooden frame with the recording side pointing downwards (Schwaiger and Schwemmer 2012) (Fig. 2). This type of construction was the same for each location and each camera model (Appendix 2) and was chosen because it is inexpensive, does not require any large aids for installation in the field and does not affect the habitat of the animals living there. Three different recording heights (0.7 m, 1.0 m and 1.5 m) were tested in order to determine at which height the best results were achieved (Appendix 3). The recording height was measured from the ground to the lens of the camera. A maximum height of 1.5 m was chosen so that the cameras could be easily checked without any additional tools.

A camera trap with the recording side pointing downwards fixed to a wooden frame at a recording height of 1.0 m over a beaver pathway
Sites for each camera were selected based on the relative ease of set up of the wooden frame in areas that would not be frequently visited by people. It was important that the chosen location should have a flat surface which beavers frequently visit. This ensured consistent photographic conditions regarding recording a consistent horizontal view of the tail. The advantage of this setup is that this type of construction is inexpensive and easy to set up.
Modification with an external lens
A plastic lens with a strength of + 1 diopter (dpt) and a diameter of 2.9 cm was fabricated by a local optician (“Fielmann AG Germany, Kleve”). This lens was attached to the L2 and hung at a height of 1.0 m (Fig. 3). This combination of camera and external lens was tested at the locations b and f (Fig. 1). Every two to four weeks all cameras were checked and SD cards were changed, as well as the batteries.

The external lens of + 1 dpt attached to the low-class camera model 2 (L2)
Definition of quality
Images of beaver tails from previously hunted beavers from the Norwegian Beaver Project (NBP) were used as a reference (Fig. 7B) (Hinds et al. unpublished) to define which images were of good and useable quality.
Results
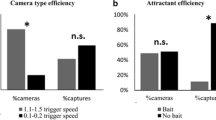
The experimental setup did not appear to be a disruptive factor for the animals in their environment since the animals visited the locations regularly. It became very quickly obvious that the camera models L1, M2, M3 and H3 failed in quality and were not suitable for our purpose (Table 2). Changes in the settings did not lead to any improvement in the image quality. Camera M1 showed only good results at a recording height of 0.7 m, but failed at the two other recording heights. L2 convinced with good quality images at recording heights of 1.0 m and 1.5 m. The different number of pictures taken is due to the different lengths of time that the cameras were outside to take pictures.
Recording height of 0.7 m
At a recording height of 0.7 m, in total, 50,312 photos were taken (Table 2) (Appendix 3). All pictures taken were at night. Beaver tails were only taken by the M1. Of these 40 images, the pattern on the tail was only recognizable in 27.5% of the photos (n = 11 photos) (Fig. 4B). The three other tested camera models (L2, M3 and H1) either failed to take images of beaver tails or the resolution was unsuitable for the intended purpose (Fig. 4A, C and D).

Photos taken at a recording height of 0.7 m. A Adult beaver taken by L2. B Beaver tail taken by M1. C Overexposed photo taken by M3. D Adult beaver taken by H1
Recording height of 1.0 m
At a recording height of 1.0 m 22,432 images were taken (Table 2) (Appendix 3). Likewise, all the pictures here were pure night shots. Beaver tails were taken by the camera models L1 and L2. L1 took 9 images of beaver tails, but none of the pictures were of sufficient quality (Fig. 5A). L2 took 381 images of beaver tails, on which 11.8% (n = 645 photos) it was possible to recognize a tail pattern (Fig. 5B). The other camera models M1 and M2 did either not catch any beavers or taken images were of lower quality (Fig. 5C, D).

Photos taken at a recording height of 1.0 m. A Beaver tail taken by L1. B Beaver tail taken by L2. C Nutria (Myocastor coypus) taken by M1. D Adult beaver taken by M2
Recording height of 1.5 m
A total of 65,340 pictures were taken at a recording height of 1.5 m and all images taken were pure night shots as well (Table 2) (Appendix 3). Tails of beavers were taken by the camera models L2 and M1. L2 took 118 photos of beaver tails, 13.6% (n = 16 photos) of which provides a detailed representation of the tail (Fig. 6A). M1 took a total of 922 images of beaver tails, but only 1.5% (n = 14 photos) showing rough patterns of the beaver tail (Fig. 6B).

Photos taken at a recording height of 1.5 m. A Beaver tail taken by L2. B Beaver tail taken by M1. C Adult beaver taken by the M2. D Overexposed picture taken by M3
The camera models M2, M3 and H1 either did not take any images of beaver tails or the images were overexposed or pixelated and therefore not in the required quality (Fig. 6C, D). In total, 1470 photos of beaver tails were taken with the cameras without an artificial lens. Only 5.8% (n = 86 photos) of the photos were useable.
Recordings with the external lens
M1 showed good results at a recording height of 0.7 m. However, the sample size was small and at recordings heights of 1.0 m and 1.5 m this camera model was terrible (Table 2). L2 took good quality photos at recordings heights of 1.0 m and 1.5 m, despite being classified in the lower price segment (Tables 1 and 2). Therefore, the external lens was attached to this camera model (Fig. 3). Due to the strength of the lens of + 1 dpt the recording height was 1.0 m. Additionally, in the previous setups without the external lens, no impairment of the beavers was determined at this recording height.
A total of 8822 photos were taken with the external lens attachment (Table 2). All of the pictures taken were at night. Beaver tails were present in 265 images, of which 24.5% (n = 65 photos) were of good and useable quality (Table 2). In particular, a direct comparison of the images without and with the external lens shows that the images taken with the lens were obviously clearer and sharper for individual recognition of beaver tails (Fig. 7A, B). The external lens enabled a clear representation of the structures of the patterns of the tail, similar to the reference images from dead animals (Fig. 7B).

A Close-up of beaver tails taken by L2 at a recording height of 1.0 m without the lens (top) and with the external lens (bottom). B Direct comparison of a beaver tail taken by L2 + external lens (top) and the reference image (bottom). C Comparison of the extracted patterns of the beaver tail taken by L2 + external lens (top) and the reference image (bottom)
If the lens was not used, only six out of 100 photos (6%) were usable; using the artificial lens, 25 out of 100 photos (25%) were usable. Consequently, the use of the external lens improves the quality of the photos by factor four. Additionally, by using the external lens, the pictures were of good quality and sharpness such that the beaver tail with its patterns structure was obviously visible. Furthermore, it was possible to extract the pattern of the beaver tail from the images taken with the external lens, as their quality was comparable to the reference picture and good enough for the further steps of individual recognition of beavers (Fig. 7C). It could thus be shown that the combination of the L2 with an attached external lens is the best method for obtaining good quality images of beaver tails.
Discussion
This study found that through the use of an additional attached lens, on a commercially available camera trap (Maginon WK 4 HD), good quality close-up pictures of beaver tails, was possible. The external lens improves the quality of the images taken by a factor of four in comparison to photos taken without the external lens. Furthermore, we showed that a fixed recording height of 1.0 m in this context has also a positive influence on the image quality of beaver tails.
Camera models
We found that a less expensive camera trap model delivered the most satisfactory images. This camera model was also easy to use. Presumably due to the largest detection zone (120°) of the L2, the image quality of this camera was the best, in comparison to the lower number of pixels of the other used cameras. Even if the H1 was the most expensive camera in the test, it generally had the poorer equipment and did not perform well, as had been reported in other studies (Wölfl 2008). Nowadays there are a variety of cameras on the market, available for different applications and for many field conditions as well as for a variety of animal species. The cameras differ greatly in terms of sensitivity, zones of detection, and performance under different environmental conditions, making it difficult to choose the right model (O’Connell et al. 2011). Similarly, the available models differ greatly in their price.
The quality of an image depends on five factors: a strong light source (LEDs), a powerful PIR sensor, a short trigger time, a high number of pixels, and a large detection area. All of the camera models we tested are passive infrared-triggered cameras, triggered in respond to the thermal energy emitted by animals in the form of infrared waves (O’Connell et al. 2011; Tobler et al. 2008; Wölfl 2008; Wölfl and Schwaiger 2017; Swann et al. 2004). The advantages of passive infrared-triggered cameras are that they have a lower rate of false triggers in comparison to active infrared-triggered cameras and they have a wider detection zone, enabling a greater range in detecting animals of various sizes (O’Connell et al. 2011; Swann et al. 2004).
Lighting made an important difference in the quality of the photos taken, especially during the night or in the dark and can be therefore a limiting factor in choosing the proper camera model (Clapham et al. 2020; O’Connell et al. 2011). All of the camera models we tested had infrared as their light source. One disadvantage of infrared light is that it does not provide high quality images (O’Connell et al. 2011). Because beavers are nocturnal all of the images in our study were taken at night. The two camera models L1 and M3, which had the worst image quality, also had the lowest number of infrared LEDs. The L2, which produced the best image quality, has the second highest number on LEDs. It is known that by adjusting the sensor at different levels of sensitivity, it has a significant impact on the number of images as well as on the quality (Swann et al. 2004). With all of the cameras we used, the sensitivity was set to the highest level, with the exception of the H1, where the PIR sensor could not be adjusted. Since the image quality of the L1 and M3 showed a general overexposure in the course of the test, their PIR sensors were set to the lowest level; however, this did not improve the image quality either.
Compared to studies in which larger and faster animals, i.e. snow leopards (Unica unica), lynxs (Lynx lynx) or red foxes (Vulpes vulpes), were recorded, the triggering time of the cameras was not of great importance in our study, since the beaver usually moves more slowly on land (Jackson et al. 2005; Sarmento et al. 2009; Wölfl 2008). Thus, the triggering time of the L2 of 0.5 s seemed to be completely sufficient here.
Recording heights
In general, cameras used to record animals from a distance of 2–5 m (Jackson et al. 2005; Sarmento et al. 2009; Swann et al. 2004). Some camera models work best from distances of even 12 m (Wölfl 2008). However, our study was about getting close-up pictures of beaver tails as well as possible, to receive detailed images of the structure of the tail. The L2 camera trap took pictures of best quality at a recording height of 1.0 m. M3 also took overexposed images even at this height and the H1 was stolen in the first night, so that no images could be evaluated. In general, it can be said that the L2 performed best, with good image quality with close-ups, even if this type of camera was not designed for close-up pictures.
A recording height of 1.8 m, as it was used in one study of taking pictures of beaver tails, was not chosen in our study because the cameras are difficult to control at this height (Schwaiger and Schwemmer 2012). During our experiment, it could not be demonstrated that any of the heights tested had a negative impact on the animals, as beaver recordings were made at each height.
External lens
With our combination of the L2 with the external lens, we were not only able to fix the image quality problems that typically occur, but also increase the number of good images by a factor of four. Furthermore, it is now possible to use the images taken with the external lens, for extracting the tail pattern, especially if the images are to be used for further semi-automated or computer-assisted evaluation (Ardovini et al. 2007; Ferreira et al. 2020; Hillman et al. 2003). As it is possible to individually distinguish beavers by the epidermal scale pattern of their tails (Hinds et al. unpublished), our method has great potential for detailed and systematic monitoring of individual beavers. Furthermore, this improved method targeting scale patterns, instead of relying on scars (Schwaiger and Schwemmer 2012), allows for a greater number of individuals to be identified overall.
Conclusion
Our study identified an optimal method for obtaining high resolution images for individual recognition of beavers, As researchers utilize their existing collections of trails cameras, we recommend rigorous testing of cameras in terms of external lens strength and distance between subject matter and camera. For studies into beavers, we provide a proven method that can lead into studies on beaver ecology, such as on abundance, distribution, population size, behaviour and home range.
References
Ardovini A, Cinque L, Della Rocca F, Sangineto E (2007) A Semi-automatic Approach to Photo Identification of Wild Elephants. Patt Recog Imag Anal 225–232
Arjo WM, Joos RE, Kochanny CO, Harper JL, Nolte DL, Bergman DL (2008) Assessment of transmitter models to monitor beaver Castor canadensis and C. fiber populations. Wildl Biol 14(3):309–317. https://doi.org/10.2981/0909-6396(2008)14[309:AOTMTM]2.0.CO;2
Association For The Study Of Animal Behaviour/Animal Society Behaviour (ASAB/ASB) (2012) Guidelines for the treatment of animals in behavioural research and teaching. Anim Behav 83(1):301–309. https://doi.org/10.1016/j.anbehav.2011.10.031
Bradfield KS (2004) Photographic identification of individual Archey’s frogs, Leiopelma archeyi, from natural markings. Doc Science Internal Series 191. Wellington
Bräsecke R, Bünning I (2005) Ansiedlung von Elbebibern im Kreis Wesel- Jahresbericht Nr. 3 2005. Ansiedlung von Elbebibern im Kreis Wesel, S- 1–14
Briggs AJ, Robstad CA, Rosell F (2021) Using Radio‐Frequency Identification Technology to Monitor Eurasian Beavers. Wildl Soc Bull 45(1):154–161. https://doi.org/10.1002/wsb.1147
Clapham M, Miller E, Nguyen M, Darimont CT (2020) Automated facial recognition for wildlife that lack unique markings: A deep learning approach for brown bears. Ecol Evol 10(23):12883–12892. https://doi.org/10.1002/ece3.6840
Costa DP (1993) The Secret Life Of Marine Mammals. Novel Tools for Studying Their Behavior and Biology At Sea. Oceanography 6(3):120–128
De Bondi N, White JG, Stevens M, Cooke R (2010) A comparison of the effectiveness of camera trapping and live trapping for sampling terrestrial small-mammal communities. Wildl Res 37(6):456. https://doi.org/10.1071/WR10046
Deutsch M (2015) Methoden zur Markierung von Kleinsäugern im Freiland – eine Übersicht (Review). Beiträge Zur Jagd- Und Wildforschung 40:275–287
Ferreira AC, Silva LR, Renna F, Brandl HB, Renoult JP, Farine DR, Covas R, Doutrelant C et al (2020) Deep learning‐based methods for individual recognition in small birds. Methods Ecol Evol 11(9):1072–1085. https://doi.org/10.1111/2041-210X.13436
Gamble L, Ravela S, McGarigal K (2008) Multi-scale features for identifying individuals in large biological databases: an application of pattern recognition technology to the marbled salamander Ambystoma opacum. J Appl Ecol 45(1):170–180. https://doi.org/10.1111/j.1365-2664.2007.01368.x
Gracanin A, Gracanin V, Mikac KM (2018) The selfie trap: A novel camera trap design for accurate small mammal identification. Ecol Manag Restor 20(2):156–158. https://doi.org/10.1111/emr.12345
Gracanin A, Mikac KM (2022) The Use of Selfie Camera Traps to Estimate Home Range and Movement Patterns of Small Mammals in a Fragmented Landscape. Animals : An Open Access Journal from MDPI 12(7). https://doi.org/10.3390/ani12070912
Gracanin A, Minchinton TE, Mikac KM (2022) Estimating the density of small mammals using the selfie trap is an effective camera trapping method. Mamm Res 67(4):467–482. https://doi.org/10.1007/s13364-022-00643-5
Green AM, Chynoweth MW, Şekercioğlu ÇH (2020) Spatially Explicit Capture-Recapture Through Camera Trapping: A Review of Benchmark Analyses for Wildlife Density Estimation. Front Ecol Evol Artikel 8:563477. https://doi.org/10.3389/fevo.2020.563477
Halley D, Rosell F, Saveljev A (2012) Population and distribution of Eurasian beaver (Castor fiber). Balt For 18(1):168–175
Halley DJ, Saveljev AP, Rosell F (2021) Population and distribution of beavers Castor fiber and Castor canadensis in Eurasia. Mamm Rev 51(1):1–24. https://doi.org/10.1111/mam.12216
Hiby L, Lovell P, Patil N, Kumar NS, Gopalaswamy AM, Karanth KU (2009) A tiger cannot change its stripes: using a three-dimensional model to match images of living tigers and tiger skins. Biol Lett 5(3):383–386. https://doi.org/10.1098/rsbl.2009.0028
Hill J (2005) Marine Mammal Monitoring Guidance for Marine Mammals. Version May 2005: Joint Nature Conservation Committee
Hillman GR, Würsig B, Gailey GA, Kehtarnavaz N, Drobyshevsky A, Araabi BN et al (2003) Computer-assisted photo-identification of individual marine vertebrates: a multi-species system. Aqua Mamm 29 (1):117–123. https://doi.org/10.1578/016754203101023960
Jackson RM, Roe JD, Wangchuk R, Hunter DO (2005) Surveying Snow Leopard Populations with Emphasis on Camera Trapping. -A Handbook. The Snow Leopard Conservancy, Sonoma, California
Jean C, Ciccione S, Talma E, Ballorain K, Bourjea J (2010) Photo-identification method for green and hawksbill turtles - First results from Reunion. In: International Sea Turtle Society (Hg.): Indian Ocean Turtle Newsletter S. 8–13
Jung TS, Boonstra R, Krebs CJ (2020) Mark my words: experts’ choice of marking methods used in capture-mark-recapture studies of small mammals. J Mammal 101(1):307–317. https://doi.org/10.1093/jmammal/gyz188
Karanth KU (1995) Estimating tiger Panthera tigris populations from camera-trap data using capture—recapture models. Biol Conser 71(3):333–338. https://doi.org/10.1016/0006-3207(94)00057-W
Kelly MJ (2001) Computer-aided Photograph Matching In Studies Using Individual Identification: An Example From Serengeti Cheetahs. J Mammal 82(2):440–449
Lahiri M, Tantipathananandh C, Warungu R, Rubenstein DI, Berger-Wolf TY (2011) Biometric Animal Databases from Field Photographs: Identification of Individual Zebra in the Wild
Littlewood NA, Hancock MH, Newey S, Shackelford G, Toney R (2021) Use of a novel camera trapping approach to measure small mammal responses to peatland restoration. Eur J Wildl Res 67(1). https://doi.org/10.1007/s10344-020-01449-z
Mayer M, Aparicio Estalella C, Windels SK, Rosell FN (2020) Landscape structure and population density affect intraspecific aggression in beavers. Ecol Evol 10(24):13883–13894. https://doi.org/10.1002/ece3.6980
Mayer M, Frank SC, Zedrosser A, Rosell F (2019) Causes and consequences of inverse density-dependent territorial behaviour and aggression in a monogamous mammal. J Anim Ecol 0:1–12. https://doi.org/10.1111/1365-2656.13100
MCCleery RA, Zweig CL, Desa MA, Hunt R, Kitchens WM, Percival HF (2014) A novel method for camera-trapping small mammals. Wildl Soc Bull 38(4):887–891. https://doi.org/10.1002/wsb.447
Mortensen RM, Rosell F (2020). Long-term capture and handling effects on body condition, reproduction and survival in a semi-aquatic mammal. Sci Rep 10(1):17886. https://doi.org/10.1038/s41598-020-74933-w
Mos J, Hofmeester TR (2020) The Mostela: an adjusted camera trapping device as a promising non-invasive tool to study and monitor small mustelids. Mamm Res 65(4):843–853. https://doi.org/10.1007/s13364-020-00513-y
Nolet BA, Rosell F (1998) Comeback of the beaver Castor fiber: an overview of old and new conservation problems. Biol Conserv 83(2):165–173
O’Connell AF, Nichols JD, Karanth KU (2011) Camera Traps in Animal Ecology. Tokyo: Springer Japan
Ranheim B, Rosell F, Haga HA, Arnemo JM (2004) Field anaesthetic and surgical techniques for implantation of intraperitoneal radio transmitters in Eurasian beavers Castor fiber. Wild Biol 10(1):11–15. https://doi.org/10.2981/wlb.2004.004
Ravela S, Gamble LR (2004) On Recognizing Individual Salamanders. In: Proceedings of Asian Conference on Computer Vision, Ki-Sang Hong and Zhengyou Zhang, Ed. Jeju, Korea S. 742–748
Robstad CA, Lodberg-Holm HK, Mayer M, Rosell F (2021) The impact of bio-logging on body weight change of the Eurasian beaver. PLoS One 16(12):e0261453. https://doi.org/10.1371/journal.pone.0261453
Rosell F, Zedrosser A, Parker H (2010) Correlates of body measurements and age in Eurasian beavers from Norway. Eur J Wildl Res 56(1):43–48. https://doi.org/10.1007/s10344-009-0289-9
Rovero F, Marshall AR (2009) Camera trapping photographic rate as an index of density in forest ungulates. J Appl Ecol 46:1011–1017
Rowcliffe JM, Field J, Turvey ST, Carbone C (2008) Estimating animal density using camera traps without the need for individual recognition. J Appl Ecol 45(4):1228–1236. https://doi.org/10.1111/j.1365-2664.2008.01473.x
Sarmento P, Cruz J, Eira C, Fonseca C (2009) Evaluation of Camera Trapping for Estimating Red Fox Abundance. J Wild Manag 73(7):1207–1212. https://doi.org/10.2193/2008-288
Schofield G, Klaassen M, Papafitsoros K, Lilley MK, Katselidis KA, Hays GC (2020) Long-term photo-id and satellite tracking reveal sex-biased survival linked to movements in an endangered species. Ecology 101(7):e03027. https://doi.org/10.1002/ecy.3027
Schwab G (2002) Biologie des Bibers
Schwab G, Schmidbauer M (2003) Beaver (Castor fiber L.; Castoridae) management in Bavaria. Denisia 9(2):99–106
Schwaiger M, Schwemmer H (2012) Evaluation der Fotofallen-Methodik zur individuellen Erkennung beim Biber. Bayerisches Landesamt für UmweltS. 1–33
Sharma RK, Jhala Y, Qureshi Q, Vattakaven J, Gopal R, Nayak K (2010) Evaluating capture-recapture population and density estimation of tigers in a population with known parameters. Anim Conser 13(1):94–103. https://doi.org/10.1111/j.1469-1795.2009.00305.x
Smith DW, Jenkins SH (1997) Seasonal change in body mass and size of tail in northern beavers. J Mammal 78(3):869–876
Smith JB, Windels SK, Wolf T, Klaver RW, Belant JL (2016) Do transmitters affect survival and body condition of American beavers Castor canadensis? Wildlife Biol 22(3):117–123. https://doi.org/10.2981/wlb.00160
Swann DE, Hass CC, Dalton DC, Wolf SA (2004) Infrared-triggered cameras for detecting wildlife: an evaluation and review. Wild Soc Bull 32(2):357–365. https://doi.org/10.2193/0091-7648(2004)32[357:ICFDWA]2.0.CO;2
Swinnen KRR, Strubbe D, Matthysen E, Leirs H (2017) Reintroduced Eurasian beavers (Castor fiber): Colonization and range expansion across human-dominated landscapes. Biodivers Conserv 26(8):1863–1876. https://doi.org/10.1007/s10531-017-1333-9
Tilo B, Neill C (2007) Individual Animal Identification using Visual Biometrics on Deformable. In: Proceedings of the 5th International Conference on Computer Vision Systems, Berlin, Germany. Accessed 9
Tobler MW, Carrillo-Percastegui SE, Leite Pitman R, Mares R, Powell G (2008) An evaluation of camera traps for inventorying large- and medium-sized terrestrial rainforest mammals. Anim Conserv 11(3):169–178. https://doi.org/10.1111/j.1469-1795.2008.00169.x
Uhe L, Albrecht K, Schleicher A, Engler JO (2020) Adjusting trail cameras to improve monitoring of small open cup nesting birds. J Ornithol 161(3):893–899. https://doi.org/10.1007/s10336-020-01758-9
Urian K, Gorgone A, Read A, Balmer B, Wells RS, Berggren P et al (2015) Recommendations for photo-identification methods used in capture-recapture models with cetaceans. Mar Mam Sci 31(1):298–321. https://doi.org/10.1111/mms.12141
Wang SW, Macdonald DW (2009) The use of camera traps for estimating tiger and leopard populations in the high altitude mountains of Bhutan. Biol Conser 142(3):606–613. https://doi.org/10.1016/j.biocon.2008.11.023
Welbourne DJ, Claridge AW, Paull DJ, Ford F (2020) Camera-traps are a cost-effective method for surveying terrestrial squamates: A comparison with artificial refuges and pitfall traps. PLoS One 15(1):e0226913. https://doi.org/10.1371/journal.pone.0226913
Wells RS, Scott MD (1990) Estimating Bottlenose Dolphin Population Parameters From Individual Identification and Capture-Release Techniques. Rep Int Whal Commn 12:407–415
Wölfl S (2008) Fotofallen-Monitoring Luchs. Ergebnisse der Pilotstudie im Bayerischen Wald. In: Bayerisches Landesamt für Umwelt S. 1–35
Wölfl S, Schwaiger M (2017) Luchs-Monitoring mittels Fotofallen. Fotofalleneinsatz in Ostbayern im Monitoringjahr 2016/2017. In: Bayerisches Landesamt für Umwelt, S. 1–40
Acknowledgements
This work is part of a project to individually recognize Eurasian beavers (Castor fiber) by their scale pattern of the tail at the Rhine-Waal University of Applied Sciences in Kleve, Germany, and the Westfälische Wilhelms-Universität Münster, Germany. We thank the ASV Kleve, the Fischereiverein Frühauf Bislich-Flüren e.V., Holemans GmbH and the Forstbetrieb Kalbeck for allowing us access to their properties. We also thank the Naturschutzzentrum im Kreis Kleve e.V. for lending us the “Reconyx” camera and the University of South-Eastern Norway for providing the comparison photographs.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1: Used cameras and their properties
Camera | L1 | L2 | M1 | M2 | M3 | H1 |
|---|---|---|---|---|---|---|
Resolution | 5–12 MP | 5 MP | 3–5 MP | 5–12MP | 3–12MP | 3.1 MP |
HD | Yes | Yes | No | Yes | Yes | Yes |
Infrared | 36 LED lights | 42 LED lights | 40 LED lights | 56 LED lights | 32 LED lights | Not specified |
Lightning range | 20 m | 20 m | 8–15 m | 20 m | 25 m | 17.5 m |
PIR sensor | Yes (adjustable) | Yes (adjustable) | Yes (adjustable) | Yes (adjustable) | Yes (adjustable) | Yes |
PIR sensor range | 20 m | 15 m | 10–20 m | 15 m | 25 m | 30 m |
Batteries | 8 AA; 1.5 V | 8 AA; 1.5 V | 8AA; 1.5 V | 8 AA; 1.5 V | 8AA; 1.5 V | 12 AA; 1.5 V |
Photo burst | 1–9 pictures | 1–7 pictures | 1–3 pictures | 1–5 pictures | 1–3 pictures | 1–10 pictures |
Trigger speed | 1.1 Sec | 0.5 Sec | ca. 1 Sec | 0.4 Sec | 0.3 Sec | 0.2 Sec |
SD cards | Up to 32 GB | Up to 32 GB | Up to 16 GB | Up to 32 GB | Up to 32 GB | Up to 32 GB |
Detection area | 60° | 120° | 52° | 100° | 45° | 42° |
SMS/MMS/E-Mail | Yes/yes/yes | No/no/no | No/no/no | No/no/no | No/no/no | No/no/no |
Appendix 2: Locations and used camera models
Location | Camera model |
|---|---|
ASV Kleve | M1 |
M3 | |
H1 | |
Untere Nuthseen | L2 |
M2 | |
Kalbeck | M1 |
M3 | |
Bedburg-Hau | L1 |
L2 | |
M1 | |
Reeser Meer | L2 |
M1 | |
H1 | |
Diersfordter Waldsee | L2 |
Appendix 3: Recording heights, used cameras and locations
Height of recording | Camera model | Locations |
|---|---|---|
1.5 m | L2 | Reeser Meer |
M1 | Kleve, Kalbeck, Reeser Meer | |
M2 | Untere Nuthseen | |
M3 | Kleve, Kalbeck | |
H1 | Reeser Meer | |
1.0 m | L1 | Bedburg-Hau |
L2 | Bedburg-Hau, Untere Nuthseen | |
M1 | Bedburg-Hau | |
M2 | Untere Nuthseen | |
0.7 m | L2 | Bedburg-Hau |
M1 | Kleve, Bedburg-Hau | |
M3 | Kleve, Kalbeck | |
H1 | Kleve |
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Dytkowicz, M., Hinds, R., Megill, W.M. et al. A camera trapping method for the targeted capture of Eurasian beaver (Castor fiber) tails for individual scale pattern recognition. Eur J Wildl Res 69, 39 (2023). https://doi.org/10.1007/s10344-023-01654-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10344-023-01654-6