
Abstract
The quality of wave measurements is of primary importance for the validation of wave forecasting models, satellite wave calibration and validation, wave physics, offshore operations and design and climate monitoring. Validation of global wave forecasts revealed significant regional differences, which were linked to the different wave buoy systems used by different countries. To fully understand the differences between the wave measurement systems, it is necessary to go beyond investigations of the integral wave parameters height, period and direction, into the frequency spectra and the four directional Fourier parameters that are used to estimate the directional distribution. We here analyse wave data measured from three different sensors (non-directional Datawell Waverider buoy, WaveRadar Rex, Optech laser) operating at the Ekofisk oil production platform located in the central North Sea over a period of several months, with significant wave height ranging from 1 to 10 m. In general, all three sensors provide similar measurements of the integral wave properties and frequency spectra, although there are some significant differences which could impact design and operations, forecast verification and climate monitoring. For example, the radar underestimates energy in frequency bands higher than 8 s by 3–5%, swell (12.5–16 s) by 5–13%, while the laser has 1–2% more energy than the Waverider in the most energetic bands. Lee effects of structures are also estimated. Lower energy at the frequency tail with the radar has an effect on wave periods (they are higher); wave steepness is seen to be reduced by 10% in the wind seas. Goda peakedness and the unidirectional Benjamin-Feir index are also examined for the three sensors.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The quality of wave measurements is of primary importance for the validation of wave forecasting models, calibration/validation of satellite wave sensors, understanding wave physics, climate monitoring, design of ships and offshore installations, operations at sea and climate trend and variability studies.
At OceanObs’09, Swail et al. (2010) noted that continuous testing and evaluation of operational and pre-operational measurement systems are an essential component of a global wave observing system, to ensure consistent wave measurements to a level of accuracy that will serve the requirements of the broadest range of wave information users. The global variations in hull, sensors and processing systems, evolution of sensors, changes in buoy designs, and new platform systems were seemingly responsible for large systematic differences seen between different observing networks, including a systematic 10% difference in significant wave height measurements between the US and Canadian networks (Queffeulou (2006), Bidlot et al. (2008), Durrant et al. (2009)).
This led to the formation of a consortium organized under WMO/JCOMM Data Buoy Cooperation Panel, the pilot project on wave measurement evaluation and test (PP-WET; www.jcomm.info/WET). The objectives of the pilot project included: (1) develop the basis for an international framework for continuous testing, evaluation of existing and planned wave buoy measurements; (2) coordinate buoy intercomparison activities; (3) develop technical documentation of differences due to hull, payload, mooring, sampling frequency and period, processing (e.g. frequency bands and cut-off), precision, transmission; and (4) establish confidence in the user community of the validity of wave measurements from the various moored buoy systems.
An open-source statistical tool was developed for such intercomparison – ‘WavEval Tools’ (Jensen et al. 2011) – to have a common basis for comparing different wave measuring sensors. The majority of sensors utilized to monitor waves off the coasts of North America is wave buoys, and they are from many different manufacturers.
One such study involved colocating Datawell Directional Waverider buoys with Environment Canada buoys off both the east and west coasts of Canada, using 6 m NOMADs (Navy Oceanographic Meteorological Automatic Device), called 6N (see Timpe and Van de Voorde (1995)), and 3 m discus (3D). The results of the intercomparisons are hosted on the intercomparison webpages.
In another study, the Field Laboratory for Ocean Sea State Investigation and Experimentation (FLOSSIE), an intra-measurement evaluation study, was undertaken deploying a 6N buoy in Monterey Canyon, CA, USA. Onboard the 6N buoy were three sensor/payload packages from NDBC (National Oceanographic and Atmospheric Administration’s National Data Buoy Center) and two from Environment and Climate Change Canada, including a TriAXYSTM sensor. An NDBC 3 m discus buoy equipped with two sensor/payload packages and a DatawellTM directional Waverider buoy were located within 19 km of the 6N site. The eight independent wave measurement systems reported hourly estimates of the frequency spectra and when applicable the four Fourier directional components. During the 59-month period, the results showed that over the mean, the various sensor/payload systems produced similar results; however, two important differences between different sensors and the Waverider buoy exist: (1) a persistent positive bias in the significant wave height estimates above 6 m and (2) the spread in the wave estimates was about ± 0.5 m for heights less than about 2 m and steadily increased to ± 2m for conditions greater than 6 m.
Wave buoys have the advantage of measuring in the free field, but they have their shortcomings. They are wave followers although moored to the seafloor, so-called quasi-lagrangian sensors as they follow the near circular motion at a wave surface (Magnusson et al. 1999), while stationed within a defined watch circle around the anchoring location. Their behaviour can be questionable in violent storms as noted by Bender III et al. (2010). With installations at sea such as large moving rigs or platforms, sensors measuring the height to the sea surface using radar or laser technology are more and more common as wave recorders. They are considerably easier and cheaper to maintain than buoys, and their use is becoming a popular replacement for surface buoys. These sensors are Eulerian, measuring surface elevation with time at a fixed location on the water surface. The sensors are to be placed downward-looking as far as possible from the platform legs, but will most probably be subject to sea spray and lee effects affecting the accuracy in the wave measurements caused by interference of the platform legs. The effect will depend on the characteristics of the waves and the diameter of the platform substructure. Reflection from steel legs is probably minimal compared to that caused by concrete legs. Lee effects have been seen to be considerable (up to 10% in significant wave height) as discussed in Magnusson (2009) and Ewans et al. (2014). These papers dealt with measurements from radar sensors (the first one with a MIROS Range finder at Ekofisk, the second with WaveRadar Rex sensors at several locations in the North Sea). Both studies showed a deficit of 5–10% in significant wave height compared to nearby wave buoys. The deficit was linked to lee effects, but these could not explain all the net biases observed.
Sea spray due to strong winds or interaction with platform substructure, foam in breaking waves, may impact the return signal from the radars or lasers as well, resulting in observable spikes in the surface elevation time series. Some sensors provide such smooth wave profile data that it is suspected that some filtering techniques are used to provide time series appropriate for wave data analysis. The monitoring of the wave climate at Ekofisk has enabled us to compare unfiltered data from a laser system measuring at 5 Hz sampling frequency to two types of radar data: a MIROS Range Finder until 2014 and a WaveRadar Rex since 2014 (the latter was previously called Saab radar). The monitoring has indicated that the WaveRadar Rex also underestimates significant wave height (Hs) by 5 to 10%, a deficiency that cannot be due solely to lee effects (unpublished report).
In the present study, we seek to quantify differences in frequency spectra from the three in situ sensors at Ekofisk including a Waverider, a WaveRadar Rex and an Optech laser, find where in the frequency domain the differences are more dominant, and how this may affect measures of spectral parameters typically used in engineering and wave research.
In the following (Section 2) ,we describe the sources of wave data used in this study. In Section 3, we describe the calculation methods for the spectral data. Section 4 contains analysis and discussion of the results, including the wave height and period comparisons, but also the spectral shape differences among the sensors and the impact on spectral parameters. Lee effects are tentatively quantified. A summary of the findings and concluding remarks is given in Section 5.
2 Wave sensors and measurements
2.1 Sensors
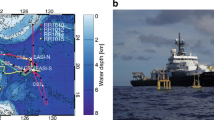
The present work includes analysis of wave profile data measured at the Ekofisk oil and gas field in the central North Sea (Fig. 1). The site is equipped with several wave sensors, used operationally in the special forecasting service ‘EXWW’ (Ekofisk eXtreme Wave Warning) that MET Norway provides for the field operating company ConocoPhillips. This monitoring has recorded at least 150 storms with Hs above 7 m over a period of 29 years. During this time, sensors have been replaced, updated or moved when old platforms are decommissioned and new ones come in place. One system has a more or less continuous recording history in the field: the Datawell Waverider buoy, which has been in operation since 1980 at Ekofisk. The Waverider at Ekofisk has always been a heave buoy; that is, directional information is not available from this sensor. Hull diameter has varied between 70 and 90 cm, but has been 90 cm in the last 10 years. The mooring is as recommended by Datawell for 70-m depth. Two buoys are used, alternating at the site about once every 1 or 2 years when battery capacity demands so and weather permits. Datawell suggests a service at their premises every 3 to 6 years. The buoy measuring during the analysis period here was new in 2013, deployed for the first time in 2014, but due to failure was taken to land after only 9 months. The failure was traced to the receiving station. The buoy was then deployed again 1 month before the analysis period. It should therefore be considered as newly serviced.

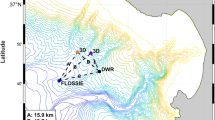
Location of Ekofisk (red dot, 56.50N 3.20E) in the central North Sea. The extension of the North Sea is about 1000 km north-south and 600 km east-west at the Ekofisk latitude. Map shows bottom topography, with depth contours every 50 m down to 250 m. Depth at Ekofisk is about 70 m
Wave profiles from the buoy are recorded for ConocoPhillips with sampling frequency 2 Hz. The data are sent in real time to a receiving station at 2/4-L; parameters are calculated and made available for personnel at the platform and also sent to MET Norway in real time for monitoring and forecasting.
With time, other sensors were introduced measuring wave height from deck levels using radar or laser technology. They are less costy compared to a buoy as they operate with energy supplies from the platform and can be serviced easily. In 2016, during the period considered here, wave measurements were also available from two other in situ sensors: a WaveRader Rex, formerly (and still) called Saab radar, placed on the bridge just north of 2/4 L (see Fig. 2), and a LASAR, consisting of four OptechTM lasers in a square array inside the bridge connecting 2/4-B and 2/4-K north of the complex (Magnusson and Donelan 2013). Wave profiles are available with a sampling frequency of 2 Hz from the Saab radar and 5 Hz from the four lasers. Time series from one of the lasers are also stored at 2 Hz. We have only used wave profile measurements at 2 Hz sampling frequency. The radar and the lasers’ heads are routinely cleaned when necessary.

Location of wave sensors at Ekofisk: the LASAR (4 Optech lasers in an array) is mounted on the bridge between 2/4-B and K in the north. The WaveRadar Rex (or «Saab») is mounted on the bridge north of 2/4-L. The length of this bridge (between 2/4-L and the next supporting platform) is ~ 140m. The Waverider is approximately 12 km west of the platform complex (latitude indicated by arrow)
When there are several sensors reporting the significant wave height, there is a challenge to identify a correct ‘ground truth’. One instrument gives one answer, not necessarily the correct one. Three instruments produce three results, not necessarily the same, but one expects nonetheless the answers (measurements of significant wave height, at least) to be statistically similar. Analyses of ~ 3000 records over 2 years (2007–2008) showed (Magnusson 2009) one radar altimeter (at the time, a MIROS Range Finder) had a discrepancy of up to 10% in Hs values compared to the Waverider. Lee effects from the platforms contribute to some of the differences found, but not all. In 2014, the Saab radar (WaveRadar Rex) was installed at a location just by the new 2/4-L platform (Fig. 2) at the southeast end of the complex. Experience though winter storms since then has showed that this sensor also (like the previous radar based altimeter) measures lower significant heights compared to the Waverider. In a comparison using 6 months of measurements in winter 2015–2016, the Saab radar had a negative bias of about 6% in significant wave height compared to the Waverider (unpublished report).
The present analysis deals with comparing spectral shapes and derived spectral parameters from the three sensors. The laser and the radar are about 2 km apart, a distance that is not considered as significant regarding wave climate or wave history in a storm. Both systems are placed on bridges between two platforms, oriented so that the laser has an open sector towards north and south, and the Saab’s open sector is towards southwest (see Fig. 2). Shadowing effects may be expected from the following directions:
-
Laser: roughly from 230o to 270o and from 050o to 090o
-
Radar: roughly from 125o to 165o and from 300o to 080o
2.2 Observations
The present analysis uses wave profile time series sampled at 2 Hz sampling frequency; the record length is 20 min, covering a period of 4 months from 1 October 2016 to the end of January 2017. The period contains 9 cases with Hs above 4m, 4 of which are close to or above 8m (see Fig. 3, showing only Waverider time series). One case was as high as 10 m. The horizontal lines for Hs = 2 and 4 m mark limits used in Hs classes in the analysis.

Overview of significant wave height( Hs = 4. σ(η(t)) ) as measured by the Waverider at Ekofisk through the 4 months September 2016 to January 2017. Horizontal lines for 2 m and 4 m are enhanced (used as thresholds for Hs-classes later in analysis)
Data return was around 97% for all three sensors, with periods with missing data not always at same time. Most of the missing data with the laser were at the end of January 2017, a period when Hs was only around 2 m.
Figure 4 shows Hs from all three sensors from 17 December to 16 January, emphasizing the 4 cases with Hs larger than 8 m. Red dots are Hs values from the laser, and we see that they are often above the blue line (Hs from Waverider), while black dots (radar) are seen often below the blue line. Another feature that is obvious is that the Hs from laser is higher than both Waverider and Saab at low levels (1–2 m).

Significant wave height ( Hs = 4. σ(η(t)) ) as measured by the Waverider (Buoy, blue line), laser (red dots) and Saab radar (black dots) at Ekofisk from 17 December 2016 to 15 January 2017. Horizontal lines for 2 m and 4 m are enhanced
Three of the nine storms with Hs above 4 m are with wind direction from the west, a direction with waves coming undisturbed to the Saab location but may be disturbed at the laser by the platform legs of 2/4-B. In four other storms, waves are coming from NW or N, a sector that is good for laser but probably not for the radar. One storm has wind and waves from south, when both sensors have an open sector. And in one storm, in October 2016, waves came from east, a direction where both sensors measure waves passing a platform in the vicinity. So, waves measured in almost all cases with Hs above 4 m may be affected at one or both sensors by the neighbouring structural members of platforms. Half of them have undisturbed values at the laser, but in lee zone at radar. In the following, some of results are also sorted with respect to local wind direction measured at 2/4-L, at 110 m above msl. The sectors chosen are so-called ‘SW’ directions (between 165o and 230o) and ‘NW’ directions (between 300o and 050o).
Figure 5 shows scatter diagrams of significant wave height Hs derived using the standard deviation of the 2Hz measurements (Hs = 4. σ(η(t))). Data are here colocated pairwise. The left panel shows the laser compared to the Waverider, the centre shows WaveRadar (SAAB) compared to Waverider, and the right panel shows radar compared to laser. The red lines are regression lines. Black lines are 1:1 line. Green dots are qq-plots. It is obvious that the radar measurements are increasingly lower than both the Waverider and the laser with increasing Hs value. Questions arising regarding all three sensors are:

Scatter diagrams of significant wave height (Hs = 4. σ(η(t))). Left panel: Optech laser vs Waverider; centre panel: Saab radar vs Waverider; and right: Saab radar vs Optech laser. Red lines are regression lines; green dots: qq-plots; black line: 1:1
- Are differences due to interference between platform constructions and waves only?
- Are there differences in specific frequency ranges?
- What differences can we see in the derived spectral parameters commonly used to classify or describe the sea state?
3 Quality control and spectral calculations
The sensors have intermittently various erroneous data: they can be spikes of obvious or inconspicuous character. Some records have a number of consecutive equal values, unphysical values of half wave period and unphysical trends in data. An early documentation of how to perform error handling can be found in an internal document from Rijkswaterstaat (Hoekstra et al. 1994). Time series from the three sensors at Ekofisk have errors that need special handling. The laser has many spikes, some obvious, some less obvious. The Waverider signal is sometimes trending in an abnormal way, or values are constantly zero. The WaveRadar Rex has almost no errors. Thresholds used in the quality control are: spike values, set relative to possible range of height values from the altimeters and 8*std; maximum individual wave periods, 35s; maximum length of 5 erroneous entries; and maximum individual skewness set to 0.9.
The quality control reduced data amount to 96.3, 92.8 and 96.7%, respectively, for Waverider, laser and radar. Colocating all three reduces the number of valid time series to 7403, or 83.6% of possible data return in this 4-month period.
Spectra are then evaluated for all 20-min records using an overlap method in matlab (pwelch.m) where the records with 2400 data points are divided into sequences of 512 data points, stepwise overlapping with 60%. A Blackman-Harris (Harris 1978) window is applied on all sequences. This results in energy spectra with 257 equally spaced frequencies ranging from 0 to 1 Hz (frequency resolution of 0.0039 Hz). To evaluate energy in different frequency bands, we first interpolate spectra to a resolution of 0.001 Hz using a cubic spline data interpolation method. Moments in the spectra are calculated over the range 0.03 to 0.5 Hz. The interpolation is carried out for simplicity of calculations when evaluating energy within different frequency bands.
Using mn = ∫ fn. E(f). df, m0 = ∫ E(f). df, the following spectral parameters are calculated for all sensors (Longuet-Higgins 1975 (Eq. 6); Goda 1970 (Eq. 7); Janssen 2002 (Eq. 8)):
The term Hs is used when significant wave height is calculated from the quality controlled time series measured with sampling frequency 2 Hz:
where η(t) is the elevation time series around the average still sea level (SWL), which is calculated using a moving average over 10 min.
4 Results
4.1 Significant wave heights and wave mean periods
The scatter plots between HM0 from the three sensors are very similar to those of Hs shown in Fig. 5. Statistics of significant wave height are summarized in Table 1. Correlation is high for all three comparisons (between 0.98 and 0.99). We see a similar difference between the two altimeters relative to the buoy using either HM0 or Hs: the laser is in the mean 11 cm higher; the radar is in the mean 10 cm lower. But slope of laser vs buoy is 1.0, showing bias of 0.1 m is equally distributed over Hs values, while slope is 0.95 between radar and buoy. This slope (with intercept = 0) indicates a deficit of 5% in Hs or HM0 compared to the Waverider and slightly more (6–7%) compared to the Optech laser.
Besides significant wave height, wave periods are also important in operational forecasting. Engineering applications use mostly peak period, a parameter that can vary strongly in multi-wave systems including locally generated wind-seas and distant swells or because of subtle variations in natural wave conditions. We focus therefore in this comparison on mean wave periods, TM01 and TM02.
Scatter plots are included for both wave period parameters in Fig. 6. Table 2 summarizes the statistics for TM01 and TM02.

Scatter diagrams with regression line (red) and qq-plot (green) of mean wave periods TM01 (top row) and TM02 (bottom row) between (left) Optech laser vs Waverider, (centre) Saab radar vs Waverider and (right) Saab radar vs Optech laser
In Fig. 6, we have regression lines for all three pairs of data apparently overlapping quite well the 1:1 line. Slope between laser and radar is closest to 1, but intercept and bias are the highest. The laser measures on average about 1% (TM01) and 2% (TM02) smaller wave periods than the buoy; the radar measures higher values in the mean (3 and 3.5%). We see some larger spread in the wave periods between the laser and the radar. Correlation is the least between these two sensors. The qq-lines between radar and laser indicate higher difference in wave periods in the range 7–8 s. Questions are if these are abnormal cases, results of bad quality control, lee effects, or inherent sensor qualities. How important is such a bias for description of the sea state, and what is the consequence on parameters used for describing the sea state (such as steepness and Goda peakedness included in the analyses)?
4.2 Spectral shapes
All 7403 collocated spectra considered from the three sensors between 1 October 2016 and 31 January 2017 are shown in Fig. 7 (blue, top panel: Waverider; red, centre: laser; black, bottom: radar). We can see that the laser has a few spectra with higher energy maxima than the two other sensors. Figures also indicate that sea states included here have many cases with what is typically swell at Ekofisk (frequencies below 0.07 Hz, or periods above 14 s).

All collocated spectra (entries = 7403) for, from top to bottom: Waverider, Optech laser and WaveRadar Rex
In Fig. 8, we compare averaged spectra from the three sensors. Left column shows <E(f)> as function of frequency f. Right column shows <f4.E(f)> as function of f. In all panels red line is for laser, blue line is Waverider, and black line is radar. Each row is for different classes of sea states, using the Waverider value of significant wave height (HM01) to sort data in different sea state classes. Top row shows average spectra using all colocated data (7403 cases). The second row is for the low wave height classes with HM01 < 2m, including 3719 cases or 50.2% of the database of colocated values. Third row is for HM01 values between 2 and 4m (3008 cases, 40.6%) and bottom row is for HM01 ≥ 4m (676 cases, 9.1%).

Average spectra from Waverider (blue), laser (red) and radar (black) from October 2016 to January 2017, sorted from top to bottom in groups of: all 7403 (100%) collocated spectra, all 3719 (50.2%) cases with HM01 (Waverider) < 2m, all 3008 (40.6%) cases with HM01 between 2 and 4m and all 676 (9.1%) cases with HM01 ≥ 4m. Left: <E(f)>, right: <f4.E(f)>
We see that the lower waves (second row) have a tendency to define a secondary wave system at lower frequencies (f < 0.1Hz), indicating impact of swell. Averaging over all spectra has moved the ‘peak’ of the swell seen in Fig. 7 to higher frequencies. We also see that the larger the significant wave height, the sharper the peak and more narrow banded the spectrum, as can be expected in high seas. In all classes, the energy around the peak is highest with the laser and lowest with the radar. This is also a feature at the peak belonging to swell.
We also see that at frequencies higher than the peak, the radar has less energy than the two other sensors (black line is the lowest). In right column, where behaviour at higher frequencies is enhanced by the multiplication with f4, this is more obvious, and we also see that laser and Waverider follow each other until 0.25–0.3 Hz. Thereafter, the laser results are amplified. We believe this is due to spikes still present in the database used. When scrutinizing some wave profiles after these findings, we found some times series with small singular spikes, small but obviously spikes that had not been removed by the simple quality control performed for this study. These can obviously cause a surplus of high-frequency energy. Their impact should be negligible for the most energetic frequency ranges and resulting total significant wave height.
For the highest wave cases, we see that the average level of the laser is slightly higher than the Waverider in the range 0.18 to 0.3 Hz.
The distribution of f4.E(f) is seen to be more or less horizontal in the range 0.15 to 0.2 Hz for higher sea states, suggesting a f-4 tail, also with the radar, although it is at a lower energy level. From 0.2 to 0.35 Hz (right column, storm waves, bottom panel), the slope is decreasing for all three sensors. The variability seen in the red line (laser), a variability that is not seen for the two other sensors, indicates that quality control is insufficient; that is, there may be residual spikes in the time series, or sea spray is present under the laser. Work is ongoing at MET Norway to reduce this noise, but proper correction to laser data could not be included in the present study.
Cases are also sorted for north-northwesterly and southwesterly cases, arranging the data using wind direction measured at Ekofisk, where the first group, so-called ‘NW’ group, are cases with wind directions between 300o and 050o , and the second group, so-called ‘SW’ group, are with wind directions between 165o and 230o. This separation in wind direction is chosen due to the orientation of the bridges on which the wave sensors are mounted, and taking account of possible interference of the surrounding structures in given wind directions. The laser is unlikely to be in a lee sector in any of the NW or SW cases, while the radar is definitely in the lee of structures in the NW group of cases. In the SW group of cases, both sensors measure waves coming from an open sector, although there might be differences if the sea state has a swell component. With this selection on wind direction together with a selection of wave height classes, we have in total 12 classes. Average significant wave height for the three sensors in the twelve classes is given in Table 3. Last two columns give differences in per cent relative to <HM01> in class. It is now seen that the laser values are biased a bit high with respect to the Waverider, and the radar values are biased low. The significant wave heights are overall 4.5% lower when measured with the radar compared to the Waverider and 2.4% higher when measured with the laser. Most of the overestimation by the laser is in low sea states (5%) (5.4% in SW cases, 4.5% in NW cases). We also see a difference in 3.7% in the highest NW cases (≥ 4m). In the intermediate wave heights (2 to 4 m, including 40% of the cases), the laser is 0.8% higher than the Waverider, and the radar is 4.7% lower.
The average wave spectra in the NW and SW classes are shown in Fig. 9. They show 3–4 features worth noticing:
-
The spectral peak energies are mostly highest with the laser, except for the highest waves from the SW sector (Fig. 9d). An open question, unanswered here, is if the waves included have a component from west or northwest, which would make waves pass though the platform 2/4-B before being measured by the laser, thereby decreasing wave energy from SW sector.
-
Energy at tails of the spectra is lowest with the radar regardless of wave height class or sector.
-
In Fig. 9f, cases with HM01 < 2m and NW sector, we see that the peak energy from laser and radar is similar, and Waverider peak energy is lowest. One can note that the differences in average HM0 are quite small, respectively, 1.6, 1.6 and 1.5 m (see Table 3).
-
In highest cases from NW, where radar is in the lee, peak energy from Waverider is similar to the radar.

<E(f)> for the three sensors (blue line: Waverider (blue), red line: laser and black line: radar) for southwesterly wind conditions (‘SW’ [165o-230o ], left column) and northerly wind conditions (‘NW’: [300o and 050o], right column). In most cases blue line between red on top and black below. In d the blue line is at top at the peak of the spectrum, in f it is at bottom
Figure 9f could lead to the conclusion that small waves are unaffected by steel members of the platforms, since peak energy is similar with both altimeters. The figure also may be interpreted as that the Waverider fails in measuring peak energy of low sea states. On the other hand, Fig. 9b (low waves, SW sector) gives another indication: Waverider and radar peaks are similar. But here, there is much impact from swell, which may come from many directions at this frequency (around 0.1 Hz), giving uncertainty in any conclusion. An open question is if swell impacts the behaviour of the buoy.
4.3 Equivalent significant wave height within spectral bands
Variability in sea state over space and time is to be expected (Bitner-Gregersen and Magnusson 2014; Bitner-Gregersen et al. 2021), but the differences seen above indicate statistics of values as measured by the sensors are going to be different. To demonstrate and quantify the differences in different parts of the frequency range of surface waves, we compare ‘equivalent significant wave heights’ (Hs,eq) in given frequency bands, defined by:
where lf1 and lf2 are limiting frequencies in a given frequency band. Knowing the wave climate of the central North Sea, we have here defined 9 frequency bands of interest in the range 0.03 to 0.5 Hz, limited by, in frequency and wave periods as given in Table 4.
Equivalent significant wave heights (HM0eq) are evaluated at all times from the three sensors in each of the nine frequency bands defined. In the North Sea, most energy is typically in bands number 4, 5, 6 and 7, with wave periods in the following ranges: 12.5–10 s, 10–8 s, 8–5 s and 5–3.3 s. Swells with longer periods (more than about 14 s) will typically come from storms in the North Atlantic, entering the North Sea through the strait between Scotland and Shetland (Fig. 1) and also from north of Shetland. Storm waves with energy in periods above 12.5 s will also typically come from north, not from southerly directions.
Scatter plots (not shown here) of equivalent wave height in the nine frequency bands show similar behaviour as for total significant wave height, where radar is generally the lowest and laser is similar to the Waverider or higher.
The distribution of equivalent significant wave height in the 9 frequency bands is shown in Fig. 10 for the three sensors for 3 classes (top panel: all colocated data; centre: all cases with HM01 ≥ 4m; bottom: highest waves HM01 ≥ 4m and ‘NW’ cases). The figures show that radar values are lowest in all cases, except for the very low frequencies where the Waverider is highest (bands 1 and 2, with wave periods longer than 16 s). The laser has pronounced higher energy values at the most energetic band for the higher sea states (4th band, 0.08–0.1 Hz, or 12.5–10 s).

Distribution of HM0eq from the Waverider (blue), laser (light green) and radar (grey) over different frequency bands (note that frequency axis is not linear). Boxes include values from 25 to 75 percentiles, solid lines 10 to 90 and dotted lines the 1 to 99 percentile values Top: all colocated (7403) values; centre: only cases with HM01 ≥ 4m (676 entries); and bottom: ‘NW’ cases and HM01 ≥ 4m (242 entries)
To quantify the differences, relative difference in median values is calculated for all 12 groups of cases, for all 9 frequency bands, using:
where S is either laser or radar.
Scatter plots (not shown here) show that in the more energetic frequency bands (4, 5 and 6), correlation between the three sensors is similar (0.97–0.98). The colocated data show a large scatter, as can be expected from 20-min records due to high sampling variability (e.g. Bitner-Gregersen et al. (2021)).
Figure 11 shows relative difference in median HM0eq values in the 9 frequency bands for: (a) all 7403 colocated data, also sorted in the ‘NW’ and ‘SW’ directions, for both laser and radar relative to Waverider and (b) same as a, but only highest waves (HM01 ≥ 4m). In the row below (Fig. 11c and d), we show average values of HM0eq from the Waverider in the same bands and for same cases.

Top (a, b): relative difference of average HM0eq (Eq. (11)) of laser and radar with respect to the Waverider in the nine frequency bands defined in Table 4. (a) including all sea states, (b) only high sea states (<HM01> ≥ 4m). Bottom (b, c): Waverider average HM0eq in the same frequency bands for (c) all sea states, (d) high sea states (<HM01> ≥ 4m). Three lines for each case include either all directions or only NW or SW cases
Where the values in Fig. 11a and b are out of scale, the average HM0eq values of the Waverider and the two other sensors are so low that relative differences are not considered.
Overall, (Fig. 11a) in the most energetic bands (5, 6 and 7) from 0.1 to 0.3 Hz, laser measures 1–2 % more than the Waverider, and radar is 3 to 9% lower. Difference between SW and NW cases with the laser is small (~ 1%), while radar energy compared to Waverider is decreased by 2% in NW cases compared to the SW cases as average for all wave classes.
Considering only the higher wave classes (Fig. 11b and d), this difference due to direction sector (and presumably, due to interference with platform members) is highest in band 6 (0.125 to 0.2 Hz, or 5 to 8 s), being shifted from − 3% (SW cases) to − 7% (NW cases). Results for frequencies 0.1 to 0.125 Hz (8 to 10 s) show that wave energy is not altered by the constructions at the radar in this frequency band.
Average HM0eq of Waverider is 1.5 m (all) and 2.1 m (NW) in band 3 (0.0625 to 0.08 Hz or 12.5 to 16 s). It is much less in the SW cases, but still 0.5 m. These long waves can only come from the north due to fetch limitations in the southern parts of the North Sea basin. The laser has around 5% more energy than the Waverider in this band, regardless of direction. The radar is lower by 13% in these so-called SW cases and by 4% in the NW cases. In metres, this is equivalent to a reduction of 7 cm on average of the swell in SW cases and of 10 cm in the NW cases. These are not high values, but may be considerable for marine operations sensitive for response from long periods.
In the first two bands, the behaviour of the three sensors is better observed in Fig. 10, where we see that the Waverider has a median value at a higher level than both laser and radar. Figures 10 and 11 suggest that the Waverider has more energy than the two other sensors in the first two bands, which is suspicious at this site, because such very low frequencies are not common, and also since neither laser nor radar has as much low-frequency energy.
4.4 Impact on spectral parameters
Comparison of spectra has shown that the radar has an unexplained discrepancy in energy, resulting in some 3–5% lower measurements in total significant wave height, only a small bias in TM01 but a more considerable bias in TM02 (0.4 s). The laser has 1–2% more energy in the most energetic frequency bands with respect to the Waverider. A question is how this impacts the spectral shape parameters often used to describe the sea states. Figures 12 to 15 show scatter plots of steepness, spectral bandwidth, Goda peakedness parameter and the unidirectional BFI parameter (Eqs. (5) to (8)), with, as before, from left to right, laser vs Waverider, radar vs Waverider and radar vs laser.

Scatter diagrams of wave steepness (1/2 HM0/kp) between laser and Waverider (left), radar and Waverider (centre) and radar vs laser (right). Red lines are regression lines, cyan lines are qq-plots. Black diagonal are lines for y = x



Steepness values are seen to be grouped in two clusters: one with low values (around 0.025), typically belonging to swell, and another one in the range of approximately 0.06 to 0.12, related to wind sea. Scatter is large, correlation is not that high (0.76–0.79), and slopes to regression lines are far from 1.0 (~ 0.75). Small correlation and large scatter make the regression lines incorrect to interpret. The qq-plots are more correct representations of the statistics of the data. Some small differences (hardly observable) are seen in the small steepness group. In the steepness range from 0.05 to 0.15, qq-lines indicate that the laser and the Waverider are quite similar, while steepness from radar is about 0.01 below both those of the laser and the Waverider. This is about 10% less. Although the colocated values have a large spread, it is anticipated that the statistical values of steepness from different sensors are used to define sea state with regard to, e.g. forces on structures. A 10% lower value is considerable in such respect and can lead to false conclusions.
Scatter diagrams of spectral bandwidth ν (Eq. (6)) are shown in Fig. 13. Laser values are overall somewhat higher than the Waverider (2–5%), and radar values are smaller than the Waverider. A large part of the values is around ν = 0.4. With the regression line for radar vs laser, this gives a value of 0.36 for the radar if bandwidth with laser is 0.4, which is 10% lower. In the range of data, the difference is between 5 and 16%.
The Goda peakedness values Qp (Fig. 14) are mostly between 1 and 5. Values have a large scatter, with correlation around 0.75. Resulting regression lines are therefore of less importance. QQ-plots indicate that statistics of peakedness are quite similar between laser and Waverider, but radar distribution of Qp is shifted slightly higher compared to both laser and Waverider.
The BFI parameter (Fig. 15) is a combination of Qp and steepness. This parameter has a large scatter as well; correlations are about 0.81, with values mostly between 0 and 0.5. Slopes of regression lines have some deviation from the 1:1 line, but scatter being large (not as large as steepness and Goda peakedness) make the regression lines questionable. QQ-plots are all close to the 1:1 line, with radar values slightly above values of Waverider and laser.
4.5 Summary
Comparing wave parameters such as significant wave height and mean periods (TM01 and TM02) measured by three different sensors at Ekofisk, an oil and gas producing platform in the central North Sea, in a period of 4 months (October 2016 to January 2017) has shown that the laser (OptechTM laser) is biased 0.1 m higher than the Datawell Waverider in the mean, and the radar, a WaveRadar Rex sensor (previously known as a Saab radar), is biased 0.1 m lower than Waverider in terms of significant wave height. The average significant wave height in the study period is around 2.3 m, with some cases above 4 m, 4 of them above 8 m. Wave periods from laser are lower than those from the Waverider (of the order of 0.1 s relative to around 6 s), and radar values are higher (of the order of 0.2 s).
The analysis of wave spectra and spectral parameters from the three sensors has shown that the radar observes less energy at all frequency bands compared to the Waverider and the laser. The radar measures 3 to 9% less energy in the most energetic bands when considering all cases and 5 to 9 % less in the highest wave cases (HM01≥ 4m). The present analysis indicates that platform structures cause a reduction in the wave energy captured by the radar of about 4% in the frequency ranges from 0.125 Hz and above. In low frequencies, 0.0625 to 0.08 Hz, or 12.5 to 16 s, waves are swell coming from north. Mean value of equivalent significant wave height is of the order of 0.5 m as measured by the Waverider in this low-frequency band. The radar measures 5 to 13% lower values than the Waverider in this band, estimated to 7 to 10 cm deficit in equivalent wave height.
Lower energy at higher frequencies reduces steepness from radar by about 10% compared to laser and Waverider. Spectral bandwidth from the radar is lower than that from the laser, despite higher energy at peaks with laser (Figs. 8 and 9). This can be a result of a lower tail in the spectra with the radar, giving lower bandwidth. Goda peakedness is also seen to be higher with radar compared to laser. Difference to the Waverider is barely seen. The spectral parameters analysed here (steepness, bandwidth, Goda peakedness, unidirectional BFI) have a lower correlation than values of significant wave height. A specific difference between measurements BFI index is not seen in the colocated data.
The results also show that the Waverider measures spurious energy at very low frequencies (from 0.0625 Hz and below, or 16 s and above). These are not measured by the radar or laser. After preparation of this analysis, a further look into the measurements of this specific buoy (and the other used at the site) has shown that such suspicious values occur at times around periods with no data. Further analysis needs to be performed to understand where these errors come from. There are some indications that the signal from the buoy antenna to receiving station on a platform can be distorted by other signals. Further analysis of the cases needs to be done. Findings of Herbers and Janssen (2016) did show that the buoy’s semi-Lagrangian movement (also studied in (Magnusson et al. 1999), but then only looking at effect on individual height measurements) artificially adds energy at the low-frequency end. Further analysis with more cases of high sea states and low-frequency energy present is needed to make more firm conclusions on this potential misbehaviour of the Waverider.
The laser data are seen to need improved quality control. This is obvious in the behaviour at the tail (Fig. 8). At the spectrum peaks (of averaged spectra), the laser reports higher energy compared to Waverider and radar. The period of 4 months needs to be extended, together with an improved quality control to make further conclusions on this.
The radar being consistently lower than both Waverider and laser, it risks giving lower design criteria if used for such purpose, or less reliable validation of hindcasts which are often used for design, and less reliable validation of operational wave forecasts. On the other hand, the performance of the Datawell buoy compared to the laser adds confidence to the buoy wave measurement, and adds credibility to the JCOMM/DBCP recommendation to use the Datawell as a common reference across the wide range of wave sensor intercomparisons going on internationally, giving similar numbers to the comparison of two colocated Datawells (as reported on the intercomparison web page).
References
Bender LC III, Guinasso NL Jr, Walpert JN (2010) A comparison of methods for determining significant wave heights—applied to a 3-m discus buoy during Hurricane Katrina. J Atmos Ocean Technol 27:1012–1028
Bitner-Gregersen EM, Gramstad O, Magnusson AK, Malila MP (2021) Extreme wave events and sampling variability. Ocean Dyn 71:81–95. https://doi.org/10.1007/s10236-020-01422-z
Bitner-Gregersen EM, Magnusson AK (2014) Effect of intrinsic and sampling variability on wave parameters and wave statistics. Ocean Dyn 64:1643–1655. https://doi.org/10.1007/s10236-014-0768-8
Bidlot, J.-R., T. Durrant, P. Queffelou, (2008).“Assessment of the systematic differences in wave observations from moorings.” JCOMM Technical Workshop on Wave Measurements from Buoys, 2 - 3 October 2008, New York, U.S. (www.jcomm.info/wavebuoys).
Durrant TH, Greenslade DJM, Simmonds I (2009) Validation of Jason-1 and Envisat Remotely Sensed Wave Heights, J. Atm. and OceanicTech. 26(1):123–134. https://doi.org/10.1175/2008JTECHO598.1
Ewans K, Feld G, Jonathan P (2014) On wave radar measurements. Ocean Dyn 64:1281–1303. https://doi.org/10.1007/s10236-014-0742-5
Goda Y (1970) Numerical experiments on wave statistics with spectral simulation. Rep Port Harbour Res Instit 9(3):57
Harris FJ (1978) On the use of windows for harmonic analysis with the discrete fourier transform. In: Proceedings of the IEEE®, vol 66, pp 51–83
Herbers THC, Janssen TT (2016) Lagrangian surface wave motion and stokes drift fluctuations. J Phys Oceanogr 46(4):1009–1021
Hoekstra, G.W., L. Boeré, A.J.M. van der Vlugt, T. van Rijn (1994): «Wiskundige beschrijving van het Standard Wave Analysis Package». Report DIR. NOORDZEE, nr 4617, 1994. Rijkswaterstaat.
Janssen, P.A.E.M., (2002). Nonlinear four wave interactions and freak waves. ECMWF Technical Memoranda No. 366, 1 May 2002.
Jensen RE, Swail V, Lee B, O’Reilly W (2011) Wave measurement evaluation and testing, 12th International Workshop on Wave Hindcasting and Forecasting & 3rd Coastal Hazard Symposium, Oct 30-Nov 4, 2011. Kohala Coast, Hawaii
Longuet-Higgins MS (1975) On the joint distribution of the periods and amplitudes of sea waves. J Geophys Res 80:1688–1694
Magnusson AK, Donelan MA, Drennan WM (1999) On estimating extremes in an evolving wave field. Coast Eng 36:147–163
Magnusson, A.K. (2009): “What is true sea state?” In proceedings of the 11TH international workshop on wave hindcasting and forecasting and coastal hazard symposium, JCOMM Technical Report 52, WMO/TD-No. 1533, IOC Workshop Report 232. Halifax, Canada October 18-23, 2009.
Magnusson AK, Donelan MA (2013) The Andrea wave. Characteristics of a measured North Sea rogue wave. J OMAE 135:3
Queffeulou P., (2006). “Altimeter wave height validation -an update,” OSTST meeting, Venice, Italy, March 16-18, 2006. (http://www.jason.oceanobs.com/html/swt/posters2006\_uk.html
Swail V, Jensen R, Lee B, Turton J, Thomas J, Gulev S, Yelland M, Etala P, Meldrum D, Birkemeier W, Burnett W, Warren G (2010) Wave measurements, needs and developments for the next decade. In: Hall J, Harrison DE, Stammer D (eds) Proceedings of the "OceanObs’09: Sustained Ocean Observations and Information for Society" Conference, Venice, Italy, 21-25 September 2009, vol 2. ESA Publication WPP-306
Timpe GL, Van de Voorde N (1995) NOMAD buoys: an overview of forty years of use, OCEANS’95 MTS/IEEE, Challenges of Our Changing Global Environment, 9-12 October 1995, San Diego. CA 1:309–315
Acknowledgements
Wave observations are recorded at the Ekofisk field in the central North Sea operated by ConocoPhillips.
Funding
Open access funding provided by Norwegian Meteorological Institute. The work was part-funded by the Norwegian Research Council project ‘EXtreme wave WArning criteria for MARine structures’ (ExWaMar), Project No. 256466.
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible Editor: Jose-Henrique Alves
This article is part of the Topical Collection on the 16th International Workshop on Wave Hindcasting and Forecasting in Melbourne, AU, November 10-15, 2019
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Magnusson, A.K., Jensen, R. & Swail, V. Spectral shapes and parameters from three different wave sensors. Ocean Dynamics 71, 893–909 (2021). https://doi.org/10.1007/s10236-021-01468-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10236-021-01468-7