
Abstract
We propose multiple aerial imaging system by use of two beam splitters in the optical system of aerial imaging by retro-reflection (AIRR). The AIRR optical system consists of a light source, a beam splitter, and a retro-reflector. Use of two-layered beam splitters enables us to show multiple aerial signs to drivers in multiple driving lanes. The purpose of this paper is to confirm feasibility that an aerial display by use of AIRR for a novel traffic information provision. First, we explain an optical configuration to show aerial images to multiple road lanes, a driving lane and an overtaking lane with AIRR by use of two beam splitters. Next, we have developed a prototype optical system by use of two large beam splitters and a large high-brightness LED sign that is designed to be used for actual road displays. The light source was an LED display with a height of 450 mm and a width of 390 mm, which shows a character. We observed aerial images by naked eyes as experiments. And we discuss the issues for practical application that the experiments have revealed.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Traffic information display is variable display devices installed on roads to provide information on roads. As road signs, they helped prevent traffic accidents [1]. There are several issues with these traffic information displays. The first, the risk of falling accidents. As is true of all road structures, there are the danger of falling accidents due to aging [2]. Traffic infrastructure has been changing to prevent accidents [3]. Road manager do not want to place heavy electrical equipment overhead for driver's safety reasons. The second is the evolution of technology. Self-driving technology is being developed [4], and cities are becoming “smart city” [5, 6]. In addition, "flying cars" are currently being researched [7, 8], and will be put to practical use in the near future. At that time, traffic information display installed overhead on roads will obstruct the path of vehicles. It is predicted that the method of providing information will change in the future. Therefore, traffic information display must change in future. We propose a new information provision technology for transportation infrastructure based on aerial imaging technology. This technology enables the display of images in the air by imaging image rays on an empty space. An advantage of this method is that it can be displayed in front of the driver's eyes without physical contact with the moving vehicle. We consider that this would allow information to be provided without obstructing the path of the flying car. The other is that only the display can be seen on the road, without the display unit overhead. This will eliminate the risk of falling accidents. Several methods have been proposed for aerial imaging technology [9, 10]. Among them, we decide aerial imaging by retro-reflection (AIRR) [11]. The advantage of AIRR is that it has excellent scalability for larger screens. Furthermore, the AIRR aerial display has wide horizontal and vertical viewing angles, making it suitable for transportation infrastructure applications in that multiple users can view the aerial image simultaneously. Moreover, the AIRR can improve brightness using by polarization [12]. Using the AIRR, we have developed a secure aerial display with a three-layered screen [13], an aerial display with depth combined with Depth-Fused 3D [14, 15], a walk-through aerial display in three different directions [16], an immersive aerial display surrounding the user [17], the AIRR thinner by combining laminated mirror optics [18], and a novel steganography method to show an aerial image that is formed with AIRR by use of dual transparent balls made of acrylic resin [19]. Various applied technologies for AIRR are developed in this way. But there is still no aerial display of a high-brightness, large-screen LED sign used in actual transportation infrastructure.
In this paper, we propose multiple aerial imaging system by use of two beam splitters as one of the applications of AIRR to display on multiple lanes. AIRR is composed of three elements: a light source, a beam splitter, and a retroreflective element. In this technology, two beam splitters are installed in parallel and multiple reflections are made between the beam splitters to form multiple aerial images from a single light source. This allows drivers in different lanes to see the same display in the same aerial image. This paper reports on the development of a prototype for an actual road display. A large-sized aerial LED sign display is fabricated to confirm the actual multiplexing of aerial images and imaginary images, and to discuss issues for its practical application.
2 Principles of forming multiple aerial images with AIRR by use of two beam splitters
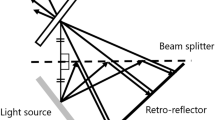
The principle of AIRR is shown Fig. 1. The conventional AIRR consists of three elements: a light source, a retro-reflector, and a beam splitter. The light emitted from the light source is divided into transmitted light and reflected light by the beam splitter, and the light reflected by the beam splitter is reflected in a direction along the incident direction by the retro-reflector. The retro-reflected light converges to the position that is plane-symmetrical of the light source with respect to the beam splitter.

Principle of AIRR (Aerial Imaging by Retro-Reflection)
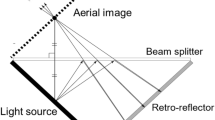
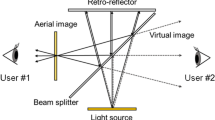
In this paper, two beam splitters are used as the beam splitter, as shown in Fig. 2. The beam splitters are installed in parallel. The aim is to multiple reflect light between the beam splitters to form a number of aerial images [18]. The first aerial image (i) is formed by the reflected light of the beam splitter 1. The second aerial image (ii) is formed by the reflected light of the beam splitter 2. The light ray that return to the beam splitter 2 are retro-reflected and formed as an aerial image (iii). The mirrored images (virtual images) are also formed by the beam splitters. (a), (b) and (c) in Fig. 3 are the imaginary images created by the beam splitter1 and 2, respectively. Note that multiple aerial (real) images and mirrored (virtual) images are formed after multiple reflections between the beam splitters.

Principle of multiple aerial images formed with AIRR by use of two beam splitters. (i), (ii) and (iii) denote the aerial images

Principle of multiple vertical images formed with AIRR by use of two beam splitters. a, b and c show the virtual images
Next, we propose an optical configuration to show aerial images to multiple road lanes, a driving lane and an overtaking lane, as shown in Fig. 4. We design that (i) and (iii) are visible in separate lanes, and (ii) is formed exactly between the lanes. The major advantages of providing traffic information by aerial display are that there is no physical contact and the viewing time is extended by displaying the information in front of the driver's eyes. To avoid contact between the cars and the display, the proposed method is set up in a location outside of the road, and only the aerial images are displayed on the road. Next, we explain the vanishing distance and make a numerical comparison between the conventional method and the proposed method. The purpose of the comparison is to discuss the advantages of having it in front without any physical contact. The vanishing distance is the distance that a driver cannot see the sign in the course of driving. If the vanishing distance is shorter, the driver will have more time to see the display. In other words, more time for the driver to recognize the display. First, we consider the vanishing distance for conventional traffic information display. Figure 5 shows specifications of the display for installation over the road head [20]. If the display is located as shown in the figure, the vanishing distance of traffic information display L can be determined by the following equation.
where h1 is the distance from the driver's eye line to the outermost edge of the display. h0 is the driver's eye level. It is determined to be 1.2 m. The vanishing point is the position where the display is no longer visible. α is the angle between the direction line at the vanishing point and the outermost line of the display. For overhead display, the angle is determined as α = 7 degrees. The standard installation height of the display is 5.0 m. If h1 = 3.8 m, the vanishing distance L is 30.9 m according to Eq. (1). The vertical length of the display at this time assumes 0.5 m.

Forming multiple aerial signs imaging from a single light source for two driving lanes. (i), (ii), and (iii) denote the aerial images

Vanishing distance for traffic information display
Next, we consider the vanishing distance for aerial image with AIRR. If the aerial image is formed as shown in the Fig. 6, the vanishing distance of aerial image LA can be determined by the following equation.
where S is vertical length of aerial image, θi is angle of light ray. When the vertical length of the beam splitter and the retro-reflector are enough, subscript i is 1, and are not enough, subscript i is 2. For example, if S = 0.5 m and θ1 = 7.5 degrees, the vanishing distance LA is 1.9 m according to Eq. (2). Calculation of Eq. (1) gave the vanishing distance of the traffic information display as L = 30.9 m. Results of calculations, the vanishing distance of aerial image will be shorter than traffic information display, as shown in Fig. 5. If both displays were visible from 100 m away, the visibility distance would be longer for the aerial display. Thus, driver visibility time increases as vanishing distance decreases. This is the advantage of aerial image. We also discuss the enough vertical length of the retro-reflector to meet the condition for Fig. 6. The length depends on the distance of the light ray. Light emitted from the light source is first reflected by the beam splitter. At this time, the length of the beam splitter SBS required is as shown in the following equation.
where LBS is distance between light source and beam splitter. Due to the principle of AIRR, the position of aerial image is plane-symmetrical of the light source with respect to the beam splitter. Therefore, LBS is also distance between aerial image and beam splitter. The reflected light by beam splitter is reflected by retro-reflector. The length of the retro-reflector SRR required is as shown in the following equation.
where LRR is distance between beam splitter and retro-reflector. Thus, we need to prepare the beam splitter more than length SBS and the retro-reflector more than length SRR to satisfy Eq. (2). Also, if sufficient length is available, the Eq. (2) holds true even for multiple image formation. For example, if S = 0.5 m, θ1 = 7.5 degrees, LBS = 1.4 m and LRR = 1.2 m, the length of the beam splitter SBS is about 0.87 m according to Eq. (3), and the length of the retro-reflector SRR is about 1.18 m according to Eq. (4). Even if the length is sufficient, if the installation position of each component is misaligned with the axis of the light source, the appearance of the aerial image changes. Therefore, as shown in Fig. 6, the height of each component must be aligned. Next, we discuss when the length of the retro-reflector SRR is not enough. In this case, θi = θ2. θ2 can be determined by the following equation.
where S’RR is the length of the retro-reflector not enough. The gap between S'RR and the length SRR needed to show the whole is Δx (= SRR–S'RR). This allows us to think of θ2 as a function of θ1. Figure 7 is a graph comparing the case with and without sufficient length. The graph is considered with S = 0.5 m, LBS = 1.4 m and LRR = 1.2 m. When the length is not long enough, the vanishing distance required to see the whole image is greater. But, as the angle of the light source increases, the gap in vanishing distance disappears. The approach to vanishing distance in the horizontal direction can be the same as in the vertical direction. In addition, we discuss the visibility area of the aerial image. Figure 8 is a picture of an aerial image forming in the center of a road. The length of the beam splitter and retro-reflector here is assumed to be sufficient for aerial image formation. To see the entire aerial image from any position in the lane, the light rays at the edge of the aerial image have to reach the edge of the lane, as shown in the Fig. 8. The required distance Lv for visibility can be obtained by the following equation.
where W is the length of the lane width. The road width is basically designed at 3.5 m per lane. For example, if θ1 = 7.5 degrees and LA = 1.9 m, Lv is 15.2 m according to Eq. (6). The aerial image can be seen from any position on the lane at or above this distance.

Vanishing distance for aerial image with AIRR

Relationship between angle of light source and vanishing distance according to Eq. (2)

Relationship between viewing angle of aerial image and lane width
3 Experiments by use a large LED sign
We experimented with a prototype of a large aerial LED sign display based on an actual roadway. The purpose of the experiment was to confirm that multiple images could be formed, as shown Fig. 4. Figures 9 and 10 show the configuration of our developed prototype system by use of a large LED sign. For the light source, we used an LED display unit that shows the Kanji "stop" with a height of 450 mm × a width of 390 mm (Fig. 11). This is the text size used on actual roads. The used LED was 5 mm round and red (OptoSupply: OS5RKA5111A). LED half-value angle was 15 degrees (θ1 = 7.5 degrees). The LEDs were mounted at a pitch of 10 mm horizontally and vertically, in accordance with the standard for road signs. The center height was set at 1.2 m, which is the driver's eye level. The beam splitter was made of 900 mm × 1800 mm tempered glass with a film (38% transmittance, 46% reflectance) on one side to increase the reflectance. For the beam splitter, a holder as shown in Fig. 12 was fabricated, and casters were attached for easy mobility. The retro-reflector was used 1400 mm × 1200 mm RF-AN. The retro-reflector also was attached to the base with holes drilled where the LEDs were placed. The angle of retro-reflector is shifted to reduce surface reflections [21]. This is to avoid the appearance of ghost images caused by surface reflections. The formation positions for respective aerial image are: (i) is about 1.4 m from the beam splitter1, (ii) is about 2.2 m from the beam splitter 2, and (iii) is about 3.8 m from the beam splitter 2. As experiment method, we observed aerial images by naked eyes moving between point A and B. Point A is on the angle of the flat object to the beam splitter. Point B is on the angle of the front of the light source. The distance between aerial images is about 0.4 m. The road width is basically designed at 3.5 m per lane. This distance should be 1.75 m when forming multiple lanes. However, this experiment did not provide the ideal display on multiple lanes due to lack of length for the beam splitter and retro-reflector, as shown in Fig. 4. This experiment is about a quarter of the actual conditions.

Configuration of our prototype multiple aerial LED signs. (i), (ii), and (iii) denote the aerial images. a and b denote the two virtual images. A and B denote observation positions

Cross-sectional view of prototype multiple aerial LED signs

LED display used for the prototype. The left figure shows the LED display when turned on, and the right figure shows the LED display when turned off

Holder of beam splitter
The experiment showed that formation of multiple real and virtual images were confirmed at plural viewing positions. Figure 13 shows the aerial images viewed at point A. As a result, three aerial images formed in a different position could be confirmed with naked eyes. Figure 14 shows images viewed at point B. One aerial image and two virtual images were clearly visible with naked eyes. In this case, the overlap of the light source, the imaginary image, and the aerial image formed a depth perception, and the appearance of the aerial image seemed to be more three-dimensional. We discuss the vanishing distance for this experiment. This distance can be thought of as the distance from the light source to the beam splitter (LBS) when considering the vanishing distance of each aerial image. The distance between the beam splitter and retro-reflector (LRR) for each aerial image was as follows (i) 1.2 m, (ii) and (iii) 2.0 m. For each aerial image, the length of the beam splitter and retro-reflector was checked for sufficiency using Eqs. (3 and 4). As a result, the length was sufficient only for aerial image (i). The vanishing distance for aerial image (i) is 1.7 m according to Eq. (2) (S = 0.45 m, θ1 = 7.5 degrees). Figure 15 is a photograph of the aerial image before and after the vanishing point. Beyond the vanishing point, the entire aerial image is obscured. For (ii) and (ii), the vanishing distance was more than 1.7 m due to a lack of a beam splitter and retro-reflector length.

Aerial image with a large device when the viewing position is point A. As a result, three aerial images which (i), (ii), and (iii) could be confirmed by the naked eye

Aerial image with a large device when the viewing position is point B. As a result, one aerial image and two virtual images could be confirmed by the naked eye

The aerial image before and after the vanishing point. The left figure is the aerial image at about 2.2 m from the formation position, and the right figure is the aerial image at about 1.6 m from the formation position
4 Theoretical model development
We consider a theoretical model for light distribution in aerial image. To study this, we first examined the angular dependence of the retro-reflectance. Experimental setups to measure the angle dependence of retro-reflector are shown in Fig. 16. A collimated laser diode (LD) was used as the light source. The retro-reflector was used RF-AN. Align the LD, beam splitter, and retro-reflector in line. The retro-reflector is rotated and illuminance of the aerial image is measured with illuminance meter. The experimental results are shown in Fig. 17. The light distribution of the aerial image can be obtained from this result and the light distribution of the light source. Figure 18 is a graph comparing the half-value angle of the light source, LED, at 15 degrees and at 60 degrees. We use the estimated light source distribution. The results show that when the light distribution angle of the light source is narrow, it matches the light distribution of the aerial image, but when it is wide, the light distribution of the aerial image is narrower than that of the light source. When considering the vanishing distance of an aerial image, the light distribution angle of the light source can be used in the case of a pincer angle, but in the case of a wide angle, it is necessary to consider the light distribution of the aerial image.

Experimental setups to measure the angle dependence of retro-reflector

Relationship between incident angle to retro-reflector and illuminance intensity of aerial image

Comparison of light source LED and aerial image light distribution. The left figure shows LED light distribution of 15 degrees, the right figure shows LED light distribution of 60 degrees
5 Discussion
Aerial display by use of AIRR can provide traffic information. We discuss the issues that the experiments have revealed. The first issue is that improvement of brightness and sharpness for outdoor use. Brightness and sharpness are important factors in display perception. We will discuss brightness first. Conventional traffic information displays have a brightness index to convey information to drivers at a distance [22]. The brightness standard is defined for each color. In the case of red, the luminance is 1600 cd/m2. These standards are set so that drivers can see them from a distance of about 100 m. To use an aerial image as a road sign, the luminance must be 1600 cd/m2 or higher. Currently, we estimate that only the aerial image (i) meets this standard. We also consider the luminance contrast with the background to be an important factor. Conventional traffic information displays show text on a black surface. In aerial images, the background is other. It is possible that changes in these conditions make it harder to perceive light. Therefore, we consider luminance more than the standard value will be required. The reason for the lack of brightness is the low amount of light used as an aerial image. The amount of light used for the aerial image is considered to be less than half that of the light source. In particular, in the case of this optical system, the transmitted light divided by the beam splitter is not used for the aerial image at all. It is necessary to design an optical system and equipment that can make good use of this wasted portion of light. Next, we discuss improvement of sharpness. The aerial image was generally blurred. We considered that this is due to the fact that the light rays are not fully converged at the image formation position. In previous AIRR experiments, a decrease in sharpness due to the spread of retro-reflector light has been reported. The main cause of this is diffraction at the retro-reflector, and the development of a retroreflective element that reduces diffraction is one of the issues to be addressed.
The second issue is that Formation of aerial images at long floating distances. When the three aerial images were compared, the third aerial image was the darkest and blurred. Due to the principle of this method, the later the aerial image is formed, the longer the floating distance of the ray becomes. This suggests that the brightness and sharpness of the image may be degraded by the floating distance of the ray. In fact, it was confirmed that the clarity was improved by moving the light source and retro-reflector closer to the beam splitter. However, the position where the aerial image of the AIRR is formed is symmetrical in the plane with respect to the beam splitter. For practical use as a traffic information display, the system must be levitated over a longer distance than this prototype. The most important issue is to form a highly visible aerial image with a long floating distance, which is included by our future works. We believe that if conditions such as brightness, etc. are met, it is possible to use aerial image (iii) or more images. Some conditions may cause unwanted aerial images to be shown. It is possible to eliminate this problem by changing the conditions of the components such as retro-reflector and installation angles. In this study, for simplicity, we performed simulation under the condition that there are no other cars in front. However, it is possible that the distance between cars on highways becomes narrower during congestion and formed aerial display may be hidden by preceding cars. We will consider aerial display on congested roads as a future work.
6 Conclusion
We have succeeded in forming multiple aerial images from a single light source by introducing two beam splitters in AIRR. We have realized a prototype aerial display by use of a large LED sign which can be used for the actual roadway. Therefore, we confirmed Aerial display by use of AIRR can provide traffic information. Multiple aerial and virtual signs that draw attention of viewers, i.e., drivers in practical installment, were presented for multiple viewing positions.
References
Pembuain, A., Priyanto, S., Suparma, L.B.: The effect of road infrastructure on traffic accidents. Atlan. Press. Adv. Eng. Res. 186, 147–153 (2019)
Fujino, Y., Siringoringo, D.M.: Recent research and development programs for infrastructures maintenance, renovation and management in Japan. Struct. Infrastruct. Eng. 16(1), 3–25 (2020)
Deac, C., Tarnu, L.: Considerations on the role of modernizing the road infrastructure in the prevention of road accidents. MATEC. Web. Conf. 290, 06004 (2019)
Badue, C., Guidolini, R., Carneiro, R.V., Azevedo, P., Cardoso, V.B., Forechi, A., Jesus, L., Berriel, R., Paixão, T., Mutz, F., Veronese, L., Oliveira-Santos, T., De Souza A.F.: Self-Driving Cars: A Survey, Expert Systems with Applications 165, 113816 (2019). https://www.sciencedirect.com/science/article/pii/S095741742030628X
Su, Y., Miao, Z., Wang, C.: The experience and enlightenment of asian smart city development—a comparative study of China and Japan. Sustainability 14(6), 3543 (2022)
Okafor, C.C., Aigbavboa, C.O., Akinradewo, O.I., Thwala, W.D.: The future of smart city: a review of the impending smart city technologies in the world. IOP. Conf. Ser. Mater. Sci. Eng. 1107, 012228 (2021)
Jang, S.J.: Flying car related technology trends. Eur J Eng Technol 10(1), 2056–5860 (2022)
Mihara, Y., Nakamura, T., Nakamoto, A., Nakano, M.: Airframe design optimization and simulation of a flying car for medical emergencies. Int. J. Automat. Technol. 16(2), 183–196 (2022)
Miyazaki, D., Maeda, Y., Maekawa, S.: Floating three-dimensional image display using micro-mirror array imaging element. Proc. SPIE. 9495, 949508 (2015)
ASKA3D, https://aska3d.com/en/index.html. (Accessed 30 June 2022).
Yamamoto, H., Tomiyama, Y., Suyama, S.: Floating aerial LED signage based on aerial imaging by retro-reflection (AIRR). Opt. Expr. 22(22), 26919–26924 (2014)
Nakajima, M., Onuki, K., Amimori, I., Yamamoto, H.: Polariation state analysis for polarized aerial imaging by retro-reflection (PAIRR). Proc. Int. Displ. Works. 22, 429–432 (2015)
Uchida, K., Ito, S., Yamamoto, H.: Multifunctional aerial display through use of polarization-processing display. Opt. Rev. 24, 72–79 (2017)
Suyama, S., Ohtsuka, S., Takada, H., Uehira, K., Sakai, S.: Apparent 3-D image perceived from luminance-modulated two 2-D images displayed at different depths. Vision. Res. 44(8), 785–793 (2004)
Terashima, Y., Suyama, S., Yamamoto, H.: Aerial depth-fused 3D image formed with aerial imaging by retro-reflection (AIRR). Opt. Rev. 26, 179–186 (2019)
Yasugi, M., Yamamoto, H.: Triple-views aerial display to show different floating images for surrounding directions. Opt. Expr. 28(24), 35540–35547 (2020)
Abe, E., Yasugi, M., Takeuchi, H., Watanabe, E., Kamei, Y., Yamamoto, H.: Development of omnidirectional aerial display with aerial imaging by retro-reflection (AIRR) for behavioral biology experiments. Opt. Rev. 26, 221–229 (2019)
Chiba, K., Yasugi, M., Yamamoto, H.: Multiple aerial imaging by use of infinity mirror and oblique retro-reflector. Jap. J. Appl. Phys. 59, 08 (2020)
Fujii, K., Yasugi, M., Maekawa, S., Yamamoto, H.: Aerial imaging steganography method for aerial imaging by retro-reflection with dual acrylic ball. Opt. Rev. 29, 250–260 (2022)
A. Takahashi, M. Kawamura, and T. Yamazaki: “Consideration of Display Contents on Traffic Information Display,” https://thesis.ceri.go.jp/db/giken/h20giken/JiyuRonbun/gt-46.pdf (2009) [In Japanese].
Yasugi, M., Yamamoto, H., Takeda, Y.: Immersive aerial interface showing transparent floating screen between users and audience. Proc. SPIE. 11402, 114025O (2020)
“Traffic Information Display Equipment HLM type display unit Equipment Specifications,” https://www.mlit.go.jp/tec/it/denki/kikisiyou/touitusiyou_03HLMjouhoubanR0203_R0206teisei.pdf(2020) [In Japanese]
Author information
Authors and Affiliations
Contributions
S.S. contributed for this paper as 1st author. They designed and conducted the experiments, analyzed the data and wrote the original draft. D.K and N.M. analyzed the data and edited the manuscript. M.Y, S.S and H.Y designed the experiments and edited the manuscript.
Corresponding author
Ethics declarations
Conflict of interests
The authors declare no conflicts of interest associated with this manuscript.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sakane, S., Kudo, D., Mukojima, N. et al. Formation of multiple aerial LED signs in multiple lanes formed with AIRR by use of two beam splitters. Opt Rev 30, 84–92 (2023). https://doi.org/10.1007/s10043-022-00771-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10043-022-00771-y