
Abstract
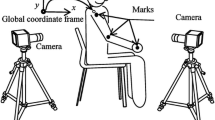
In this study, experiments of three-dimensional (3D) arm movements have been conducted, and the positions of marks provided on a shoulder, an elbow, and a hand are observed. In addition to the investigation of such trajectories in a 3D space, these trajectories are projected to a sagittal, a frontal, and a transverse planes. Then, specific features in these planes are investigated, and detailed properties of human arm trajectories have been uncovered. Next, kinematical features of a human arm during a movement have been analyzed on the basis of behavior of joint angles. Here, a kinematical arm model with joint redundancy is defined, and the kinematics of the model is reconstructed from the measured trajectories. Subsequently, the trajectories of all joint angles during a movement are obtained using the inverse kinematics, and their properties are analyzed in detail. The result shows that the angular trajectories are remarkably similar to those which are produced under the minimum angular jerk criterion.






Similar content being viewed by others


References
Kashima T, Iwaseya M (2011) Trajectory control of biomimetic robots for demonstrating human arm movements. J. Artif Life Robot 16(3):338–342
Flash T, Hogan N (1985) The coordination of arm movements: an experimentally confirmed mathematical model. J Neurosci 5:1688–1703
Hollerbach J (1990) Planning of arm movements. In: Osherson D, Kosslyn S, Hollerback J (eds) Visual cognition and action, vol 2. MIT Press, pp 183–211
Uno Y, Kawato M, Suzuki R (1989) Formation and control of optimal trajectory in human multi-joint arm movement. Biol Cybern 61:89–101
Alexander R (1997) A minimum energy cost hypothesis for human arm trajectories. Biol Cybern 76:97–105
Admiraal M, Kusters M, Gielen (2004) Modeling kinematics and dynamics of human arm movements. Mot Control 8:312–338
Andel C, Wolterbeek N, Doorenbosch C, Veeger D, Harlaar J (2008) Complete 3D kinematics of upper extremity functional tasks. Gait Posture 27(1):120–127
Pollick F, Maoz U, Handzel A, Giblin P, Sapiro G, Flash T (2009) Three-dimensional arm movements at constant equi-affine speed”. Cortex 45(3):325–339
Amasay T, Karduna A (2009) Scapular kinematics in constrained and functional upper extremity movements. J. Orthop Sports Phy Ther 39(8):618–627
Biryukova E, Roby-Brami A, Frolov A, Mokhtari M (2000) Kinematics of human arm reconstructed from spatial tracking system recordings. J. Biomech 33(8):985–995
Sugawara K and Kashima T, Satoh H (2014) Measurement and analysis of human arm trajectories in 3D movements (in Japanese). In: Proceedings of the 46th SICE Hokkaido branch con., pp 71–74
Soechting J, Buneo C, Herrrmann U, Flanders M (1995) Moving effortlessly in three dimensions: does Donfers’ law apply to arm movement? J Neurosci 15(9):6271–6280
Biess A, Liebermann D, Flash T (2007) A computational model for redundant human three-dimensional pointing movements: integration of independent spatial and temporal motor plans simplifies movement dynamics. J Neurosci 27(48):13045–13064
Yussof H, Yamano M, Nasu Y, Ohka M (2006), Design of a 21-DOF Humanoid Robot to Attain Flexibility in Human-Like Motion. In: Proceedings of the 15th IEEE Inter. Sympo. on Robot and Human Inter. Com., vol 202, p 207
Asada H, Slotine J (1986), Robot analysis and control. John Wiley and Sons, pp 31–34
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Kashima, T., Sugawara, K. Experimental and theoretical analysis of human arm trajectories in 3D movements. Artif Life Robotics 20, 203–209 (2015). https://doi.org/10.1007/s10015-015-0217-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-015-0217-x