
Abstract
Energy efficiency represents an important aspect of mechanical design. Despite their long history, gears still play a determinant role in several applications ranging from the automotive, to the aeronautical sectors. The more and more stringent regulations in terms of efficiency have encouraged the gearbox manufacturers to increase the investments to achieve more efficient designs leading to energy saving, reduction of pollutant emission and increased reliability related to the reduction of the operating temperatures. A decrease of the power losses allows also a downsize and a reduction of the weight of the system, with an increase in the power density and performances. Engineering tools allowing a comparison of different design solutions already during the design stage can pave the way to a real transition to a sustainable future. Most available models are based on empirical relations and dimensional analyses resulting to be accurate only as far as the geometry and operating conditions reflect the ones used to calibrate the models. With the developments in computational performances the research started to focus on numerical approaches. However, while most of the numerical approaches have been proved to be sufficiently accurate to capture the power losses of geared systems, the high computational effort required for their application to real gearboxes is still hurting with the industrial practice. Moreover, new phenomena related to new lubricant (e.g aeration, channeling, circulation) could be not captured/simulated with the standard available models. In this paper the latest advancements to overcome both the computational effort issue and the lack of specific models are shown with practical industrial case studies.
Zusammenfassung
Die Energieeffizienz ist ein wichtiger Aspekt der mechanischen Entwurf. Getriebe spielen immer noch eine entscheidende Rolle in verschiedenen Anwendungen, von der Automobilindustrie bis hin zur Luftfahrt. Die immer strengeren Vorschriften in Bezug auf den Wirkungsgrad haben die Getriebehersteller dazu veranlasst, ihre Produkte zu verbessern, um effizientere Konstruktionen zu erreichen, die zu Energieeinsparungen, einer Verringerung der Schadstoffemissionen und einer höheren Zuverlässigkeit aufgrund der Senkung der Betriebstemperaturen führen. Eine Verringerung der Energieverluste ermöglicht auch eine Verkleinerung und Gewichtsreduzierung des Systems bei gleichzeitiger Erhöhung der Leistungen. Technische Hilfsmittel, die einen Vergleich verschiedener Konstruktionslösungen bereits in der Entwurfsphase ermöglichen, können den Weg für einen echten Übergang zu einer nachhaltigen Zukunft ebnen. Die meisten verfügbaren Modelle beruhen auf empirischen Beziehungen und Dimensionsanalysen, die nur insoweit genau sind, als die Geometrie und die Betriebsbedingungen denen entsprechen, die zur Kalibrierung der Modelle verwendet wurden. Mit den Entwicklungen bei den Rechenleistungen begann sich die Forschung auf numerische Ansätze zu konzentrieren. Die meisten numerischen Ansätze haben sich zwar als hinreichend genau erwiesen, um die Leistungsverluste von Getrieben zu erfassen, aber der hohe Rechenaufwand, der für ihre Anwendung auf reale Getriebe erforderlich ist, stellt immer noch eine Einschränkung dar. Darüber hinaus können neue Phänomene im Zusammenhang mit neuen Schmierstoffen (z. B. Belüftung, Kanalisierung, Zirkulation) mit den verfügbaren Standardmodellen nicht erfasst/simuliert werden. In diesem Beitrag werden die neuesten Fortschritte zur Überwindung des Problems des Rechenaufwands und des Mangels an spezifischen Modellen anhand praktischer industrieller Fallstudien vorgestellt.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The power losses of gearboxes can be classified into two main categories. The first one comprises the load-dependent power losses, i.e. the one related to friction and proportional to the transmitted load. Those losses arise mainly in the contact surfaces of bearings (sub-index \({}_{B}\)) and gears (sub-index \({}_{G}\)). The second category of losses are the so-called load-independent power losses (sub-index \({}_{0}\)), that arise from the interaction of the lubricant (mixture) and the moving/rotating components [1]. \(P_{LS}\) refers to the losses of seals, while \(P_{X}\) to the losses of other generic components such clutches or synchronizes.
While for the load-dependent losses accurate analytical models can be used, the load-independent losses are more complex to be quantified due to the large amounts of factors involved in the dissipation mechanism, ranging from the lubricant type (mineral oil, synthetic oil, grease) to the lubrication condition (dip lubrication, oil injection, spray etc.). Moreover, with the “green-tribology”, targeted to environmentally friendly consumption of resources and energy, and the consequent development of new eco-lubricants, new phenomena (e.g. aeration, channeling, circulation etc.) have been observed. With these premises, the real challenge is not any more to have only time-efficient models for predicting the power dissipation, but also reliable model to capture the real phenomena causing that power dissipation. The goal of the present paper is to shed light on the latest possibility offered by the numerical approaches for the simulation of the lubrication of gearboxes. In particular, different solvers and mesh handling techniques for the simulation of various operating conditions (churning lubrication, cavitation, aeration and grease-lubrication) as well as geometrical configurations (spur gears, bevel gears, planetary gears, multistage gearboxes) will be detailed described.
2 State of the art
2.1 Analytical models
The load-independent power losses of gears \(P_{LG0}\) can be subdivided three sub-categories: churning (\(P_{LG0,C}\)), windage (\(P_{LG0,W}\)) and squeezing losses (\(P_{LG0,S}\))
Churning and windage are two physical phenomena that differ by the fact that the former is related to a fluid mixture (multiple phases), the latter involves only one single phase fluid. Churning losses are predominant in dip lubrication, while windage has an impact only when gears strongly interact with air (e.g. injection lubrication). These two phenomena are complementary. Squeezing is instead related to sudden volume variations in the mating region and the related pressure gradients. The first studies on this topic date back to Soo and Princeton [2], Daily and Nece [3], and Mann and Marston [4] whose works involved the churning of smooth disks. The first scholar dealing with a (single) rotating gear was Ohlendorf [5]. Niemann [1] improved the formulation by Ohlendorf to consider high immersion depths and low tangential speeds. Terekhov [6] expanded the application field to a wider range of operating conditions and included additional influencing parameters such the radial wall distance and the volumes of the housing. Even if the model according to Terekhov can be probably considered the first quasi-complete model, it does not consider some important parameters such as, for example, the normal backlash and the helix angle. Similar approaches were proposed by Boness [7], Lauster and Boos [8], Mauz [9], and Walter [10]. Mauz’s model seems to be, even nowadays, 40 years later, the most complete available model. Some years later, Changenet et al. [11] proposed an experimentally derived model based on dimensional analysis. Another analytical model is proposed in the ISO/TR 14179-1 [12] standard. Kahraman et al. [13,14,15,16] proposed a physic-based fluid mechanics model to predict the churning power losses of a gear pair. For what concerns the windage losses, the first studies were performed in the ’80 by Anderson and Loewenthal [17] and successively by Dawson [18]. Starting from the results of Butsch [19], Maurer [20] and Terekhov [6] proposed equations for the squeezing losses. Diab et al. [21] derived an empirical model for the estimation of such losses. More recently, Quiban et al. [22] focused their investigation on windage on spiral bevel gears. As previously mentioned, the analytical/empirical model have the big advantage to be very lean (from a computational perspective). However, the range of applicability is very limited, they did not provide any information about the lubricant distribution, and are not suitable to take into account the new phenomena related to the adoption of new lubricants and additives.
2.2 CFD studies on gears
The relatively recent significant increase in the computational resources had promoted a fast grown of the numerical approaches. Among them, Computational Fluid Dynamics (CFD) is actually the most widespread method for the analysis of systems involving fluid flows, including geared transmissions. The main reason why CFD has lagged behind with respect to other Computer-Aided Engineering (CAE) tools is related to the high complexity of the underlying behaviour, which precludes a description of fluid flows that is at the same time economical and sufficiently accurate. However, despite these general considerations, CFD has gained a lot of of interest also in industrial practice, leading to the reduction of time and costs of new designs, and to the possibility to study systems where controlled experiments are particularly complex to perform. The main CFD approach relies on Finite Volumes (FV). The domain of interest (computational domain, i.e. the internal volume of the gearbox in case of lubrication simulations), is discretized with a very high number of elementary volumes (cells of the mesh). For each cell it is possible to solve three conservation (or governing) Partial Differential Equations (PDE)s for mass (Eq. 3), momentum (Eq. 4), and energy (Eq. 5). These PDEs (Navier-Stokes equations) are converted into algebraic equations that are solved iteratively [23].
An application of the FV method for gear lubrication simulations requires specific mesh-handling techniques to deal with the topological changes of the domain in consequence of the gear rotation. The simplest approach to study a single rotating gear is the so called Moving Reference Frame (MRF). It is a steady state approximation in which different cell regions move at different rotational speeds. This method is also called “frozen rotor approach”: it does not consider the relative motion of a rotating zone with respect an adjacent stationary zone, i.e. the mesh remains fixed. Additional terms related to the Coriolis and centripetal accelerations are added to the momentum Eq. 4. This approach is particularly used in turbo-machinery, but it has been applied also to single rotating gears. Very simple models considering a single sector of spur gears with periodic boundary conditions were considered by Al-Shibl et al. [24], Pallas et al. [25], Chaari et al. [26], and Marchesse et al. [27]. The scholars exploited this approach to study the windage power losses of single spur gears. Sometimes even a 2D simplification of the sector was adopted, leading to an over-simplification of the physics and to an underestimation of the power losses. Webb et al. [28] and Turner et al. [29] applied the same approach on spiral bevel gears. Cavotta et al. [30] studied the churning power losses of a rotating disk analysing the influence of different turbulence models. Bianchini et al. [31, 32] applied the MRF technique to a planetary gearbox for aero-engine applications. However, in order to apply this modeling technique, the backlash was hugely increased so that the gears did not engage any more. Lu et al. [33] implemented a numerical model of a spiral bevel gear pair to study the lubrication and temperature characteristics of an intermediate gearbox with splash lubrication. Also in this case the gears meshing was neglected. Apart from the impossibility to model the gear meshing, the MRF gives just the regime solution of an unsteady problem. In order to improve the results and describe the transient start-up, the sliding mesh approach (also called rigid mesh motion RMM) can be an alternative. The domain is split, like in the MRF approach, in several cylindrical regions. Differently from the MRF approximation, the motion is reproduced by rotating one portion of the mesh instead of the reference system only. Despite the capability to model transient regimes, also the RMM cannot deal with the gear meshing. Santra et al. [34] exploited this method to study the lubrication in the transmission of a tractor. Concli et al. [35, 36] and Gorla et al. [37] applied the RMM to investigate the load-independent power losses of spur and helical single gears. The results showed good agreement with experimental measurements. Fondelli et al. [38] used such technique to analyse the oil jet impinging on a single spur gear to evaluate the power losses in oil jet lubrication. Hildebrand et al. [39] studied the influence of gear geometry and circumferential speed on the heat dissipation under atmospheric conditions. In this case, the center distance was augmented in order to apply the sliding mesh, namely to eliminate the gear engagement. An alternative that overcome the limitation of not being able to model the gear engagement is represented by the overset mesh (also called overlapping grids method, or chimera framework), in which, the different meshes are not complementary but overlapping. Each body has its integral mesh. A common background mesh serves as reference grid for the motions of the other grids. The field variables are interpolated between the grids. In this way the meshing process is significantly simplified and completed independently for each sub-region. However, the interpolation causes numerical error and loss of accuracy. Klier et al. [40] applied the over-set mesh approach to study the influence of the oil filling level on the lubrication of two spur gears in a cylindrical domain. Cho et al. [41] implemented a CFD model based on the over-set mesh approach of a planetary gearbox. Renjith et al. [42] analysed the power losses and the lubrication in a differential system, demonstrating the capability of the CFD model to provide useful information for the optimization of the internal layout of the gearbox. Arisawa et al. [43] implemented a numerical model to investigate the influence of the shrouds on the churning and windage power losses in bevel gears. Saegusa and Kawai [44] studied the oil flow in an automotive manual transmission. The results of predictions of lubrication performance and churning losses displayed a good correlation with experimental data. Deshpande et al. [45] analysed oil jet lubrication in helical and spur gears. The authors have used this approach to study the squeezing losses [46, 47].
An alternative approach that allows to consider the gear meshing is the re-meshing. This approach foresees a deformation of the mesh to accomplish the boundary motions up to a certain threshold after which some elements are replaced. On the one hand, this approach does not need the interpolation of the field variables, hence ensuring high accuracy. On the other hand, the regeneration of the mesh can result in a higher computational cost. The re-meshing could be either “local” or “global” depending regions enabled for re-meshing.
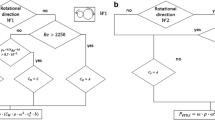
In the Local Remeshing Approach (LRA), only the elements having low quality are deleted and re-created. This method is effective but the mesh update can lead to extremely small elements that limits the maximum allowable time-step to ensure the numerical stability leading to significant decreases of the computational performances (Fig. 1). Gorla et al. [48] and Concli et al. [49,50,51] applied the LRA to study the power losses of spur gears. The numerical results showed good agreement with experimental data. Following a similar approach, Liu et al. [52,53,54,55,56] and Hildebrand et al. [57] focused on the oil flow prediction and its validation with high-speed camera recordings . The implemented CFD models could capture the experimentally observed oil flow considerably well. Similar works on spur gear pairs were done by Burberi et al. [58], Fondelli et al. [59], Li et al. [60], Korsukova et al. [61]. More recently, also bevel gears (Hu et al. [62], Lu et al. [63]), hypoid gears (Peng et al. [64, 65]), and orthogonal face gear drive (Dai et al. [66]) were simulated with CFD. It emerges that while different types of gears could be modelled with LRA, this approach requires massive parallelization to contain the computational costs. In this regard, Concli et al. [67,68,69,70,71] implemented efficient models in an open source environment based on the the Global Remeshing Approach (GRA) (Fig. 2). The main idea is to perform a global substitution of the entire grid rather than substituting only the low quality elements. While the domain to be re-meshed results higher, the better control over the mesh size and quality and the consequent allowable time-steps lead to much better computational performances. The main drawback of the GRA is related to the fact that it is efficient only as long as the computational domain can be discretized with extruded grids (e.g. Type‑C back-to-back test rig, cycloidal gears, spur planetary gears). If this is not the case, as in helical or bevel gears, the great advantages of this mesh-handling strategy cannot be exploited. Indeed, the complete re-meshing with tetrahedrons does not give any benefit with respect to the LRA.

LRA: 2 subsequent meshes – the grids differs significantly in terms of element size

GRA: 2 subsequent meshes – the grids are comparable
While the introduction of numerical tools allowed to overtake the limitations of the analytical/empirical models for predicting the load-independent power losses of gears and the lubricant distribution, the analysis of geared systems is particularly challenging due to the topological modification of the computational domain caused by the gear rotations. Methods as the MRF and the sliding mesh can be used only for a single rotating gear. The over-set mesh is not sufficiently accurate to predict the oil flows and power losses. The re-meshing approaches (both LRA and GRA) seems to be the only options for reliable efficiency predictions. While the LRA is computationally not efficient in any condition, the GRA ensures computational gains only for simple extrudable geometries [71, 72]. Moreover, the more and more frequent adoption of additives and special lubricants is promoting the occurrence of new physical phenomena that, both with traditional approaches and with experimental measurements, are difficult to be explained, predicted and quantified. With these premises, the authors have, on the one side, further developed the GRA method to expand the efficient domain of applicability also to non-extrudable geometries, as helical and bevel gears, and complex systems as multistage and planetary gearboxes, on the other side, have implemented new solvers capable of modelling phenomena such aeration (bubble entrapment in the lubricant), cavitation (transition from liquid to vapour of the lubricant due to local pressure decreases), channeling and circulation (phenomena typical of non-Newtonian fluids). The next paragraphs are devoted to briefly explain the theory and showing possible applications of such new computational tools.
3 New approaches for industrial applications
In the next sub-section, 4 practical applications are shown. Specifically, the study of an industrial multistage helical gearbox exploiting the new \(\text{GRA}^{\text{MC}}\) mesh handling technique, the effect of cavitation of the lubricant on the load-independent power losses in an FZG back-to-back test rig, the different loss mechanisms in grease lubrication and the impact of aeration both on losses and lubricant flows in bearings.
3.1 Enabling complex simulation via \(\text{GRA}^{\text{MC}}\) & AMI: a multistage helical gearbox
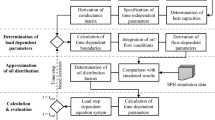
In order to be able to effectively apply any FV numerical method to a real (complex) industrial gearbox, an efficient mesh-handling strategy is fundamental. In this regard, the authors have developed a new recursive approach called Global Remeshing Approach with Mesh Clustering (\(\text{GRA}^{\text{MC}}\)). It relies on the generation of a set of meshes that covers one entire engagement. This set of grids is stored in database and is recursively reused. Once the set of meshes (typically 10 to 20 – but specific procedures based on mesh quality and design parameters can be implemented to determine the optimum number of meshes) has been computed, it is sufficient to coherently set the time-handling libraries and rotational speeds to investigate the desired operating conditions. This algorithm was introduced to overcome the high computational effort required for the CFD simulation of domains that are not-extrudable, as helical and bevel gears.
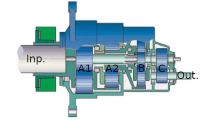
The analysed system is shown in Fig. 3a. It is a two stage gearbox having a total transmission ratio of 4.76. An Arbitrary Mesh Interface (AMI) was used to split the domain (Fig. 3b) and simplify the meshing procedure (use of non conformal grids). Exploiting the \(\text{GRA}^{\text{MC}}\) approach, 12 grids were created for the first sub-domain (input stage) and 9 for the second one (output stage). Fig. 4 shows the grid-update procedure. The 1st grid for the input domain (Mesh 1) is substituted after few time-steps and covers \(1/12\)th of engagement. On the contrary, for the output stage, which rotational speed is slower, the grid (Mesh A) can is substituted every three input stage grid updates. The results in terms of power losses differs from the experimental measures by less than 10% for each tested condition in the range 3000–9000 rpm and 40–60 \({}^{\circ}\)C. Fig. 3c shows the pressure fields: it is interesting to appreciate the capability of the present model to highlight both the squeezing (pressure gradients in the mating region) as well as the windage mechanisms (pressure peaks at the tooth tips) as main sources of loss. Moreover, it is interesting to notice that with the present approach it was possible to perform each simulation, parallelized among 32 cores (\(8\times\) INTEL Xeon® Gold 6154 CPU, 4 Cores, 3 GHz-384 GFLOPs) in just about 3 hours (to reach the regime condition where the efficiency was evaluated). Other studies from the authors have highlighted that the present approach based on \(\text{GRA}^{\text{MC}}\) can lead to a reduction of the computational effort of about \(-93\)% between LRA and GRA [67] and a further \(-96\)% between GRA and \(\text{GRA}^{\text{MC}}\) [73]. As an example, the simulation of the FZG back-to-back test rig (reference case) with dip lubrication, took 2466 min with the LRA, 172.5 min with the GRA and only 7.5 min with the \(\text{GRA}^{\text{MC}}\) with a net speed up of x328 times!

Multistage helical gearbox [74]: a experimental setup; b meshing domains; c pressure fields and identification of the loss mechanisms

Workflow of the \(\text{GRA}^{\text{MC}}\) algorithm [74]
3.2 Enabling the study of caviting systems
Even if cavitation is a lower-order phenomenon in gearboxes, for some specific operating conditions their effects are significantly affecting the efficiency of the system. In this regard an FZG back-to-back test rig was used as reference. The testing gearbox was completely filled with lubricant. Being the oil not compressible, its pressurization, if cavitation do not occur, should not have any impact on the load independent power losses. Experimental tests by Otto et al. [75] shown a significant power loss difference for the not-pressurized system vs. pressurized one. The scholars do not explain this strange evidence. With CFD it is possible to keep the cavitation phenomenon into account by simply adding a source term mimic the phase change rate to the mass conservation equation.
where \(\alpha\) is the volume fraction, the sub-indexes \({}_{l}\) and \({}_{v}\) stand for liquid and vapour phases, and \(\dot{m}\) is the specific mass transfer. This could be estimated according to different models. The most common one is the model by Kunz et al [76]. \(U_{c}\) is an artificial supplementary velocity field that is defined in the vicinity of the interface in such a way that the local flow steepens the gradient of the volume fraction function and the interface resolution is improved. Cavitation is the transition from liquid to vapour phase when the vaporization pressure is achieved. This change of state has the effect of limiting the minimum value of pressure. By doing this, the power loss decrease could captured very well. The comparison between the measured data in terms of power losses and the numerical predictions shows a discrepancy that results averagely below 2%.
Fig. 5 clearly shows the effect of cavitation: by limiting the minimum pressure on the rear flank to the vaporization value, the suction contribution to the losses disappears reducing the total dissipation. Also the lubricant fluxes result completely different: instead of being sucked-in again in the successive teeth pocket, the oil is thrown away axially.

Resistant torque with and without over-pressure: experimental vs. CFD
3.3 Enabling the study of grease lubrication mechanisms
While in case of cavitation the implementation of the new physical behaviour was possible by simply adding a source term in the mass conservation equation, in presence of grease lubrication new rheological models should be considered. The Newtonian assumption of describing the fluid behaviour with 2 parameters (density and viscosity) is not any more sufficient. Grease, in fact, exhibits a non-Newtonian behaviour; therefore additional quantities have to be specified to fully describe its properties. In past studies the authors have demonstrated that the Herschel-Bulkley model (a combination of both the Bingham Plastic and Power Law models) is capable to ensure accurate result for what concern grease lubrication of gears [77]. The grease is assumed to behave as a very viscous fluid at low-strain rates (\(\dot{\gamma}\leq\dot{\gamma}_{c}\)) while when the critical value \(\dot{\gamma}_{c}\) is overtaken, the viscosity is described using a power law.
For \({\dot{\gamma}}\leq{\dot{\gamma}}_{c}\)
For \({\dot{\gamma}}> {\dot{\gamma}}_{c}\)
\(K\) is the grease consistency factor and \(n\) is the power law index.
As an example, let consider the FZG back-to-back test rig. Experimental measures by Stemplinger et al [78] have shown that after a certain threshold, a further increase of the amount of lubricant (grease) do not produce a further increase in the power losses (as for oil dip lubrication). The specifically developed numerical approach was able to accurately reproduce the power loss measurements giving at the same time an insight on the physical behaviour. Two mechanisms have been observed: channelling at low filling levels, and circulation at high filling levels. The former refers to a condition in which almost no lubricant is present between the teeth, thus providing an insufficient amount of grease in the mating region. A gap originates between the gears and the sump. The grease is squeezed out axially and does not come back in the engagement region. On the other side, circulation occurs at higher filling levels and refers to the condition in which the grease completely wets the teeth. In this situation a certain amount of fresh grease moves from the sump to the rotating wheels region and is circulated around. The flattening of the power loss curve at high filling levels (Fig. 6) can be related to the transition between the two phenomena. The comparison between the measured data in terms of power losses and the numerical predictions shows a discrepancy that results averagely below 5%.

Different power loss mechanisms at different filling levels: channelling vs. circulation
3.4 Enabling the study of the aeration phenomenon
In mechanical gearboxes, the motion of the gears, but also the one of the rollers causes of the bearings, especially in case of lubricants with additives, promotes the formation of a mixture of the lubricant and the air present in the system. Aeration is the physical phenomenon by which air is entrapped with in a liquid (in this case the lubricant). Three main aeration types can be found in the literature: (1) entrained air, (2) foam, and (3) dissolved air [79]. Entrained air refers to suspended bubbles. The level of aeration is the balance between the rate of incorporation of air and its release. The latter leads to the foaming effect; the air, which has a lower density with respect to the lubricant, rises to the free-surface forming thin liquid lamellae which thickness depends on the surface tension. These phenomenon heavily influences the lubrication properties changing the average behaviour of the lubricant mixture and, consequently, its effectiveness and the amount of power losses. In order to take this effect into account, the aeration analytical model according to [80] was implemented in OpenFOAM®. As for cavitation, the mass conservation equation is modified with an additional source term defined as
where \(G_{g}\) is the volume of air per unit of time, \(C_{\text{air}}\) is a calibration parameter, \(A_{S}\) the free surface area at each cell, \(\rho\) is the lubricant density, and \(P_{t}\) represents the turbulent forces and \(P_{d}\) considers the stabilizing forces and depends from the turbulence characteristic length scale. Such model was successfully applied to study the behaviour of a reference taper roller bearing at increasing rotational speed. Experimental acquisitions via Particle Image Velocimetry (PIV) [81, 82] allow to reconstruct the tangential velocity field between the cage and the outer ring. While for low speeds, where the effect of aeration is negligible, the standard solver can effectively predict the velocity and pressure fields and, therefore, the power losses, with an increasing speed more and more air bubbles are entrapped in the lubricant. As shown in Fig. 7, at 2100 rpm the standard solver is not any more capable to reproduce the real conditions while the new solver, that includes the aeration mechanism, is aligned with the PIV data.

Comparison between the standard-, the aerated-solver and the PIV measurements in terms of velocity fields [82]
4 Conclusion
The increasing demand for reliable power losses models for the manufacturing of more and more efficient gearboxes has led many research groups to focus on the development of predictive tools for the load-independent power losses. The adoption of flexible numerical tools that can be customized according to the specific needs allows on the one hand to capture mostly every physical behaviour and, thus, properly modelling lubrication and estimate power losses and efficiency. In this regard, new solvers for cavitation, aeration and grease-lubrication have been developed by the author and proved to be effective in reproducing the experimental evidence. On the other hand, the recent development of effective mesh handling strategies has paved the way for a massive application of such techniques to industrial cases considering that now the computational effort is compatible with the industrial practice. With the presented approach, the simulation effort is reduced by a factor of x328 with respect to the standard available approaches. The simulation of a reference single stage cylindrical spur gear stage could be now solved in few minutes while about 10 years ago, with the approaches available at that time, the solution required some days.
References
Niemann G, Winter H (2003) Getriebe allgemein, Zahnradgetriebe–Grundlagen, Stirnradgetriebe, 2. edn. Maschinenelemente, vol 2
Soo SL, Princeton NJ (1958) Laminar flow over an enclosed rotating disk. Trans ASME 80:287–296
Daily JW, Nece RE (1960) Chamber dimension effects on induced flow and frictional resistance of enclosed rotating disks. ASME J Basic Eng 82:217–232
Mann RW, Marston CH (1961) Friction drag on bladed disks in housings as a function of reynolds number, axial and radial clearance, and blade aspect ratio and solidity. ASME J Basic Eng 83(4):719–723
Ohlendorf H (1958) Verlustleistung und Erwärmung von Stirnrädern (PhD thesis, Technische Universität München)
Terekhov A (1975) Hydraulic losses in gearboxes with oil immersion. Russ Eng J 55(5):7–11
Boness R (1989) Churning losses of discs and gears running partially submerged in oil. In: Proceedings of the ASME International Power Transmission and Gearing Conference, vol 1, pp 355–359
Lauster E, Boos M (1983) Zum Wärmehaushalt mechanischer Schaltgetriebe für Nutzfahrzeuge. VDI-Berichte, vol 488, pp 45–55
Mauz W (1987) Hydraulische Verluste von Stirnradgetrieben bei Umfangsgeschwindigkeiten bis 60 m/s. Universität Stuttgart
Walter P (1982) Untersuchungen zur Tauchschmierung von Stirnrädern bei Umfangsgeschwindigkeiten bis 60 m/s. Universität Stuttgart
Changenet C, Velex P (2007) A model for the prediction of churning losses in geared transmissions—Preliminary results. J Mech Des 129:128–133
Iso/tr-14179‑1 (2001) Gears — Thermal capacity — Part 1
Seetharaman S, Kahraman A, Moorhead M, Petry-Johnson T (2009) Oil churning power losses of a gear pair: experiments and model validation. J Tribol 131(2). https://doi.org/10.1115/1.3085942
Seetharaman S, Kahraman A (2009) Load-independent spin power losses of a spur gear pair: model formulation. J Tribol 131(2). https://doi.org/10.1115/1.3085943
Seetharaman S, Kahraman A (2010) A windage power loss model for spur gear pairs. Tribol Trans 53(4):473–484
Kahraman A, Hilty D, Singh A (2015) An experimental investigation of spin power losses of a planetary gear set. Mech Mach Theory 86:48–61
Anderson NE, Loewenthal SH (1982) Design of spur gears for improved efficiency. J Mech Des 104(4). https://doi.org/10.1115/1.3256434
Dawson P (1984) Windage power losses in high speed gears. Arch Proc Inst Mech Eng A Power Proc Eng 198:51–59
Butsch M (1989) Hydraulische Verluste schnellaufender Stirnradgetriebe. Universität Stuttgart
Maurer J (1995) Lastunabhängige Verzahnungsverluste schnellaufender Stirnradgetriebe. Universität Stuttgart
Diab Y, Ville F, Velex P, Changenet C (2004) Windage losses in high speed gears—Preliminary experimental and theoretical results. J Mech Des 126(5):903–908
Quiban R, Changenet C, Marchesse Y, Ville F, Belmonte J (2020) Churning losses of spiral bevel gears at high rotational speed. Proc Inst Mech Eng J J Eng Tribol 234(2):172–182
Versteeg HK, Malalasekera W (2007) An introduction to computational fluid dynamics: the finite volume method. Pearson education
Al-Shibl K, Simmons K, Eastwick C (2007) Modelling windage power loss from an enclosed spur gear. Proc Inst Mech Eng A J Power Energy 221(3):331–341
Pallas S, Marchesse Y, Changenet C, Ville F, Velex P (2013) Application and validation of a simplified numerical approach for the estimation of windage power losses in spur gears. Comput Fluids 84:39–45
Chaari F, Romdhane MB, Baccar W, Fakhfakh T, Haddar M et al (2012) Windage power loss in spur gear sets. WSEAS Trans Appl Theor Mech 7(2):159–168
Marchesse Y, Changenet C, Ville F, Velex P (2011) Investigations on cfd simulations for predicting windage power losses in spur gears. J Mech Des 133:2
Webb T, Eastwick C, Morvan H (2010) Parametric modelling of a spiral bevel gear using cfd. In: Aircraft engine; ceramics; coal, biomass and alternative fuels; education; electric power; manufacturing materials and metallurgy. Turbo expo: power for land, sea, and air, vol 1, pp 229–238
Turner A, Morvan H, Simmons K (2013) Two phase cfd modelling of a spiral bevel gear using particle injections and a wall film model. In: Structures and dynamics. Turbo expo: power for land, sea, and air, vol 7B
Cavotta M, Hotait M, Singh A (2018) A computational fluid dynamics (cfd) model for gear churning. SAE technical paper
Bianchini C, Da Soghe R, Errico JD, Tarchi L (2017) Computational analysis of windage losses in an epicyclic gear train. In: Heat transfer. Turbo expo: power for land, sea, and air, vol 5B
Bianchini C, Da Soghe R, Giannini L, Fondelli T, Massini D, Facchini B, D’Errico J (2019) Load independent losses of an aeroengine epicyclic power gear train: numerical investigation. In: Aircraft engine; fans and blowers; marine; honors and awards. Turbo expo: power for land, sea, and air, vol 1
Lu F, Wang M, Pan W, Bao H, Ge W (2020) Cfd-based investigation of lubrication and temperature characteristics of an intermediate gearbox with splash lubrication. Appl Sci 11(1):352
Santra TS, Raju K, Deshmukh R, Gopinathan N, Paradarami U, Agrawal A (2019) Prediction of oil flow inside tractor transmission for splash type lubrication. SAE technical paper
Concli F, Gorla C, Della Torre A, Montenegro G (2014) Windage power losses of ordinary gears: different cfd approaches aimed to the reduction of the computational effort. Lubricants 2(4):162–176
Concli F, Gorla C, Della Torre A, Montenegro G (2015) Churning power losses of ordinary gears: a new approach based on the internal fluid dynamics simulations. Lubr Sci 27(5):313–326
Gorla C, Concli F, Stahl K, Höhn B-R, Klaus M, Schultheiß H, Stemplinger J-P (2012) Cfd simulations of splash losses of a gearbox. Adv Tribol 2012. https://doi.org/10.1155/2012/616923
Fondelli T, Andreini A, Da Soghe R, Facchini B, Cipolla L (2015) Numerical simulation of oil jet lubrication for high speed gears. Int J Aerosp Eng 2015. https://doi.org/10.1155/2015/752457
Hildebrand L, Dangl F, Paschold C, Lohner T, Stahl K (2022) Cfd analysis on the heat dissipation of a dry-lubricated gear stage. Appl Sci 12(20):10386
Klier C, Berger L, Stock K (2015) New prospects for oil flow simulation in rotating spur-gear systems. Proc Int Conf Gears 2255:893–903
Cho J, Hur N, Choi J, Yoon J (2016) Numerical simulation of oil and air two-phase flow in a planetary gear system using the overset mesh technique. In: 16th International Symposium on Transport Phenomena and Dynamics of Rotating Machinery
Renjith S, Srinivasa VK, Shome B (2015) Cfd based prediction of spin power loss of automotive differential system. SAE Int J Commer Veh 8:460–466
Arisawa H, Nishimura M, Imai H, Goi T (2014) Computational fluid dynamics simulations and experiments for reduction of oil churning loss and windage loss in aeroengine transmission gears. J Eng Gas Turbine Power 136:9
Saegusa D, Kawai S (2014) Cfd analysis of lubricant fluid flow in automotive transmission. SAE technical paper
Deshpande S, Joshi H, Madhavan J, Mason P, Wink C (2018) Two-way coupled cfd approach for predicting gear temperature of oil jet lubricated transmissions. SAE Int J Commer Veh 11(3):163–170
Concli F, Gorla C (2012) Oil squeezing power losses in gears: A cfd analysis. 74:37–48. https://doi.org/10.2495/AFM120041
Concli F, Gorla C (2014) A cfd analysis of the oil squeezing power losses of a gear pair. Int J Comput Methods Exp Meas 2(2):157–167
Gorla C, Concli F, Stahl K, Höhn B-R, Michaelis K, Schultheiß H, Stemplinger J-P (2013) Hydraulic losses of a gearbox: cfd analysis and experiments. Tribol Int 66:337–344
Concli F, Gorla C (2014) A cfd analysis of the oil squeezing power losses of a gear pair. Int J Comput Methods Exp Meas 2(2):157–167
Concli F, Gorla C, Stahl K, Höhn B-R, Michaelis K, Schultheiß H, Stemplinger J et al (2013) Load independent power losses of ordinary gears: numerical and experimental analysis. In: 5th World Tribology Congress, WTC 2013, vol 2, pp 1243–1246
Concli F, Conrado E, Gorla C (2014) Analysis of power losses in an industrial planetary speed reducer: measurements and computational fluid dynamics calculations. Proc Inst Mech Eng J J Eng Tribol 228(1):11–21
Liu H, Jurkschat T, Lohner T, Stahl K (2018) Detailed investigations on the oil flow in dip-lubricated gearboxes by the finite volume cfd method. Lubricants 6(2):47
Liu H, Jurkschat T, Lohner T, Stahl K (2017) Numerical modeling and validation of oil distribution and churning losses in gearboxes. In: Proceedings of the 6th World Tribology Congress
Liu H, Jurkschat T, Lohner T, Stahl K (2017) Determination of oil distribution and churning power loss of gearboxes by finite volume cfd method. Tribol Int 109:346–354
Liu H, Standl P, Sedlmair M, Lohner T, Stahl K (2018) Efficient cfd simulation model for a planetary gearbox. Forsch Ingenieurwes 82(4):319–330
Liu H, Link F, Lohner T, Stahl K (2019) Computational fluid dynamics simulation of geared transmissions with injection lubrication. Proc Inst Mech Eng C J Mech Eng Sci 233(21–22):7412–7422
Hildebrand L, Dangl F, Sedlmair M, Lohner T, Stahl K (2022) Cfd analysis on the oil flow of a gear stage with guide plate. Forsch Ingenieurwes 86(3):395–408
Burberi E, Fondelli T, Andreini A, Facchini B, Cipolla L (2016) Cfd simulations of a meshing gear pair. In: Heat transfer. Turbo expo: power for land, sea, and air, vol 5A
Fondelli T, Massini D, Andreini A, Facchini B, Leonardi F (2018) Three-dimensional cfd analysis of meshing losses in a spur gear pair. In: Heat Transfer. Turbo expo: power for land, sea, and air, vol 5B
Li J, Qian X, Liu C (2022) Comparative study of different moving mesh strategies for investigating oil flow inside a gearbox. Int J Numer Methods Heat Fluid Flow. https://doi.org/10.1108/HFF-10-2021-0695
Korsukova E, Morvan H (2017) Preliminary cfd simulations of lubrication and heat transfer in a gearbox. In: Heat Transfer. Turbo expo: power for land, sea, and air, vol 5B
Hu X, Jiang Y, Luo C, Feng L, Dai Y (2019) Churning power losses of a gearbox with spiral bevel geared transmission. Tribol Int 129:398–406
Lu F, Wang M, Bao H, Huang W, Zhu R (2022) Churning power loss of the intermediate gearbox in a helicopter under splash lubrication. Proc Inst Mech Eng J J Eng Tribol 236(1):49–58
Peng Q, Zhou C, Gui L, Fan Z (2019) Investigation of the lubrication system in a vehicle axle: numerical model and experimental validation. Proc Inst Mech Eng D J Automob Eng 233(5):1232–1244
Peng Q, Gui L, Fan Z (2018) Numerical and experimental investigation of splashing oil flow in a hypoid gearbox. Eng Appl Comput Fluid Mech 12(1):324–333
Dai Y, Ma F, Zhu X, Su Q, Hu X (2019) Evaluation and optimization of the oil jet lubrication performance for orthogonal face gear drive: modelling, simulation and experimental validation. Energies 12(10):1935
Concli F, Della Torre A, Gorla C, Montenegro G (2016) A new integrated approach for the prediction of the load independent power losses of gears: development of a mesh-handling algorithm to reduce the cfd simulation time. Adv Tribol 2016. https://doi.org/10.1155/2016/2957151
Concli F, Gorla C (2016) Numerical modeling of the power losses in geared transmissions: windage, churning and cavitation simulations with a new integrated approach that drastically reduces the computational effort. Tribol Int 103:58–68
Concli F, Gorla C (2017) Numerical modeling of the churning power losses in planetary gearboxes: an innovative partitioning-based meshing methodology for the application of a computational effort reduction strategy to complex gearbox configurations. Lubr Sci 29(7):455–474
Concli F, Maccioni L, Gorla C (2019) Lubrication of gearboxes: cfd analysis of a cycloidal gear set. WIT transactions on engineering sciences, vol 123, pp 101–112
Concli F (2017) Low-loss gears precision planetary gearboxes: reduction of the load dependent power losses and efficiency estimation through a hybrid analytical-numerical optimization tool. Forsch Ingenieurwes 81(4):395–407
Concli F, Gorla C (2017) Cfd simulation of power losses and lubricant flows in gearboxes, pp 2–14
Mastrone MN, Concli F (2021) CFD simulations of gearboxes: implementation of a mesh clustering algorithm for efficient simulations of complex system’s architectures. Int J Mech Mater Eng 16(1):12
Mastrone MN, Concli F (2022) A multi domain modeling approach for the CFD simulation of multi-stage gearboxes. Energies 15(3):837
Hohn B-R, Michaelis K, Otto H-P (2011) Influences on no-load gear losses. Ecotrib 2:639–644
Kunz RF, Boger DA, Stinebring DR, Chyczewski TS, Lindau JW, Gibeling HJ, Venkateswaran S, Govindan TR (2000) A preconditioned Navier–Stokes method for two phase flows with application to cavitation prediction. Comput Fluids 29(8). https://doi.org/10.1016/S0045-7930(99)00039-0
Mastrone MN, Concli F (2021) CFD simulation of grease lubrication: analysis of the power losses and lubricant flows inside a back-to-back test rig gearbox. J Nonnewton Fluid Mech 297:104652
Stemplinger JP, Stahl K, Hoehn BR, Tobie T, Michaelis K (2013) Analysis of lubrication supply of gears lubricated with greases NLGI 1 and 2 and the effects on load-carrying capacity and effciency. NLGI 80th Annual Meeting
Nemoto S, Kawata K, Kuribayashi T, Akiyama K, Kawai H, Murakawa H (1997) A study of engine oil aeration. JSAE Rev 18(3):271–276
Hirt CW (2003) Modeling turbulent entrainment of air at a free surface. Flow Science
Maccioni L, Chernoray VG, Mastrone MN, Bohnert C, Concli F (2022) Study of the impact of aeration on the lubricant behavior in a tapered roller bearing: innovative numerical modelling and validation via particle image velocimetry. Tribol Int 165:107301
Maccioni L, Chernoray VG, Bohnert C, Concli F (2022) Particle image velocimetry measurements inside a tapered roller bearing with an outer ring made of sapphire: design and operation of an innovative test rig. Tribol Int 165:107313
Funding
Open access funding provided by Libera Università di Bolzano within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Concli, F., Mastrone, M.N. Latest advancements in the lubricant simulations of geared systems: a technology ready for industrial applications. Forsch Ingenieurwes 87, 1181–1191 (2023). https://doi.org/10.1007/s10010-023-00698-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10010-023-00698-z