
Abstract
Intelligent rock bolts can be used in mining operations to acquire information on the bolt's status and movements of the rock mass. The future value of this technology resides in optimizing the support layout and increasing safety. The primary goal of this research is to investigate the sensor spatial distribution necessary for efficiently identifying roof wedges in mines. Roof wedges occur when three joints intersect over the roof, forming a triangular shape. They present a hazard by falling and causing damage. Sensor density refers to the number of sensors on a single rock bolt and the number of intelligent rock bolts in the mine or one section. Too many sensors drive costs up, and too few sensors compromise measurement quality. This research visualizes and investigates the results of the simulated models of intelligent rock bolts depending on the number of installed sensors and intelligent bolts to get a better understanding of the problem and describe the technique used, including numerical simulations and the considered parameters. Furthermore, it offers insight into the findings' possible implications, providing knowledge about the viability of using intelligent rock bolts.
Highlights
-
Explores the concept of sensor density, balancing the number of sensors on rock bolt and the number of intelligent rock bolts in a mine or section.
-
Show the potential of intelligent rock bolt usage in mining.
-
Requirements for the design of intelligent rock bolt network.
-
Optimal sensor density to detect gravity driven failures.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Tunnel safety and stability are paramount concerns in both underground construction and mining operations. The ever-changing nature of geological formations, coupled with the inherent challenges posed by fluctuating ground conditions, necessitates the development of innovative techniques for monitoring and mitigating potential risks. In this pursuit, the integration of state-of-the-art technology into traditional engineering practices has yielded a ground-breaking concept: intelligent rock bolts equipped with deformation sensors (Fuławka et al. 2022, 2022b; Johnson et al. 1999; Song et al. 2017). These effective tools are set to transform the underground environment by providing real-time insights into subsurface behaviours. With the introduction of intelligent rock bolts, technological breakthroughs have cleared the path for substantial improvements in mining safety and rock mass monitoring. Intelligent rock bolts collect data on bolts conditions and motions inside the rock mass, which can be used to improve safety measures and optimise mine support systems. With a focus on wedge detection in particular, this study aims to determine the optimum sensor density of intelligent rock bolts needed to identify gravity-driven failures.
The rock mass is a complex material that displays a wide range of characteristics, from intact to completely fractured. This research focuses on the blocky rock mass where there is a high likelihood of wedge formation. Wedge failure is a gravity-driven structural failure caused by three intersecting joints or bedding planes and one open plane of excavation. It is one of the most common failures in shallow excavations (Hoek et al. 1995). Structurally controlled failure is investigated with the simulated data collected from intelligent rock bolts. With the focus on the support design considering the specific gravity failure mode of the roof.
In designing support systems for underground excavations, it is common to follow a specific procedure. This process typically begins with the collection of engineering and geological data from exposed surfaces and borehole cores, followed by the characterization of the rock mass and the classification of potential failure modes (Hoek et al. 1995). During the initial stages of support design, it is possible to anticipate the failure mode, which depends on the structure of the rock mass and the depth of the excavation. Failure mode can be structurally controlled (gravity-driven) or induced by stress. Incorporating intelligent rock bolts into the early stages of support design is crucial because they not only serve as a monitoring system but also provide structural support. Intelligent rock bolts could confirm the occurrence of wedges and provide real-time monitoring, thereby offering valuable insights into the rock mass. Furthermore, they enable proactive support and enhance the utilization of the support system alongside traditional methods, ultimately enhancing security and certainty. Determining the optimal number of rock bolts is generally challenging, and this is where bolt utilization becomes invaluable—it helps validate the design choices and identifies areas where adjustments in support levels may be necessary.
The term 'optimal sensor density' describes the quantity of intelligent rock bolts and the number of sensors on them needed to achieve meaningful data collection. Given the scarcity of complete real-world data, this study employs numerical models to simulate roof wedges, evaluating the efficacy of intelligent rock bolts as an effective technique.
1.1 Literature Background
Rock mass stability refers to the capacity of rock to withstand deformation, failure, or collapse when subjected to diverse factors including gravity, water, seismic activity, and human interventions. This concept is valid in mining, geotechnical engineering, and geology, as unstable rock masses can present substantial hazards to infrastructure, natural resources, and human safety. Assessing rock mass stability typically involves employing a range of methods and combinations, such as field observations, laboratory testing, and numerical modelling. These approaches allow for a comprehensive understanding of the behaviour of rock masses under various conditions, aiding in the identification and mitigation of potential risks (Schubert et al. 2001; Terzaghi 1946).
Rock falls in mines often result from instability in the rock mass or structural failures. Unstable blocks tend to detach from the surfaces where gravity drives the direction of that movement as shown in Fig. 1 (Schneider 2002). They occur when fragments of rock detach from the mine's ceiling or walls, plummeting to the ground. Factors such as blasting operations, seismic events, and geological instability can all contribute to rock falls (Palmstrom and Stille 2007; Terzaghi 1946; Wasantha et al. 2014; Zheng et al. 2015). Mining engineers employ various strategies to prevent rock falls and maintain mine infrastructure. These include installing rock bolts, wire mesh, and shotcrete to support the rock mass (Stillborg 1993). Assessing the risk of rock falls involves employing a range of methodologies, including empirical methods, numerical modelling, and observational techniques (Lu et al. 2015; Shapka-Fels and Elmo 2022). These approaches help anticipate the likelihood and severity of rock falls, enabling the implementation of appropriate risk mitigation measures. Rock falls pose a significant safety hazard for miners, potentially causing injuries or fatalities if individuals are struck by falling rocks. Furthermore, they can lead to damage to equipment and infrastructure, resulting in costly repairs and operational downtime (Fortsakis et al. 2012; Hoek 2006; Ömer 2018).

Kinematics of detachment: a falling, b sliding, c dumping, d spalling (according to (Schneider 2002))
1.2 Introduction to Rock Bolting Systems
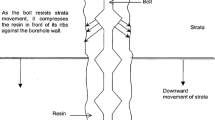
Relying on the judgment alone when designing a support system can lead to two extreme cases (over design and under design), and that is why it is important to include measurements as an unbiased and objective variable in the support design process (Hoek et al. 1995). Rock bolts have also been used for many years as the most common support method in underground mining and civil engineering (U.S. Department of Interior Bureau of Mines Staff 1987). There are many different types of rock bolt anchoring systems available, the three most common ones are mechanically anchored, grouted and resin bolts, and friction bolts (Hoek 2000). Figure 2 shows three different rock bolting systems: (a) grouted rebar, (b) mechanically anchored, and (c) friction bolt. Choosing a system depends on the rock mass condition (Kaiser and Cai 2012; Li 2017; Waclawik et al. 2017).

Different types of rock bolting systems: a grouted rebar, b mechanically anchored, c friction bolt
Rock bolt's primary function is to increase the stability and safety of the rock mass within the excavation (Hoek et al. 1995) and they can be combined with other supports like shotcrete and wire mesh. Short-term bolts are typically not grouted, whereas long-term bolts should be grouted to prevent corrosion when groundwater is present. The pull-out force is commonly used to measure the shear strength between the bolt and the rock mass where the critical embedment length is an important parameter (Høien et al. 2021). The maximum load is defined by the material properties and type of the bolt, and the actual load it encounters depends on the rock mass and position in the profile (Li 2017). For example, if there is a wedge formation in the roof of the excavation, these bolts will deform more than the ones in the sidewall. By combining the bolt's deformation state with steel's mechanical properties, we can calculate elastic and plastic capacity, as well as overall utilisation. If this data is plotted alongside the bolt pattern in the excavation, it could indicate local or regional instability caused by bolt load (Nöger et al. 2023).
Different bolting systems have different failure principles (Cao et al. 2012)). Grouted rebar can slip (failure is in the border of bolt and grout), tensile failure, or in some cases shear failure (Bharti et al. 2014). Mechanically anchored bolt is expected to have tensile failure, and friction bolt could slip. If try to combine sensors with those systems grouted rebar can have localized deformations since it is connected with the grout along the whole length. We can use that to track deformation along the whole length with multiple sensors to identify those localized deformations and hence see the separation positions—if we assume that more movement will happen in the area. Mechanically anchored bolt is connected with the rock mass in only two points, on the surface with the plate and a nut, and inside the rock mass with the expansion shell. In this case, it is enough to install one long sensor along the bolt and check the capacity and state of the bolt (elastic, yielding and plastic).
2 Intelligent Rock Bolts and Sensor Technology
Sensors could be combined with all three aforementioned systems, Fig. 2. Connecting these bolts with a central unit system for data visualization and interpretation makes them intelligent bolts. The precision of measurements depends on the sensor. In the case of a strain gauge, the resolution depends on the number of sensors used. The intelligent rock bolt (Fig. 3) is a technologically advanced system with the capability to detect deformation along its tendon (Fuławka et al. 2022), applicable in both the mining and civil engineering domains. Intelligent rock bolt is more likely to be used in civil engineering due to considerations of price and availability. Given the extensive use of traditional rock bolts in the mining sector, even a marginal increase in their prices translates into substantial expenses. The anticipation of future development and subsequent price reductions holds the promise of expanding its potential usage in mining. Until then, there is a pressing need for optimization and strategic positioning of intelligent bolts within mining operations. These intelligent rock bolts present countless possibilities, yet their complete potential necessitates thorough exploration, and limitations must be critically evaluated. Acknowledging the existing challenges, including cost considerations and the need for careful positioning, underscores ongoing efforts to harness the full capabilities of intelligent rock bolts in the mining sector. This sets the foundation for exploring their innovative role in improving sustainability, productivity, and safety as well as their critical significance in real-time rock bolt deformation monitoring during mining operations.

Intelligent rock bolt components: a deformation sensor, b rock bolt (steel bar), c nut, d plate, e wireless readout unit (collecting and sending data), f segment length
Despite the advantages, it's essential to acknowledge certain drawbacks associated with intelligent rock bolts. Their higher cost compared to conventional counterparts and the need for periodic maintenance, such as battery replacements, pose challenges. Nevertheless, these setbacks should not overshadow the broader potential they hold. Though they might not be found in every mine, intelligent rock bolts are a major component in the digitalization of mining's future. An important step forward is the strategic deployment in chosen areas, which provides a nuanced approach to their implementation. This strategy acknowledges that while intelligent rock bolts might not be embraced globally, they have the power to substantially change specific regions.
Their ability to provide real-time monitoring of rock bolt deformation as mining activities progress is what makes them revolutionary. The ability to detect changes along the tendon is made possible by the resolution of intelligent rock bolts, which indicates the number of sensors on a single bolt. Thus, assumptions regarding changes to the surrounding rock structure are possible. Each bolt provides details about a particular line in space; however, the spatial resolution offers a more comprehensive view, dependent upon the network of interconnected intelligent rock bolts. The ability of the system to provide data on specific areas or the entire mine is an example of its comprehensive monitoring capabilities.
3 Methodology
In this study, the aim was to ascertain the optimal number of intelligent bolts required to acquire meaningful deformation data. To achieve this, discrete element method (DEM) simulations were conducted using the 3DEC (version 7.0) software (Dr. Cundall and Itasca 2024), focusing on roof wedge failure and grouted rebar intelligent rock bolts. The selection of 3DEC software was based on its suitability for DEM simulations, providing a platform for modelling. Key parameters such as material properties, boundary conditions, and geometry were chosen to represent the real-world scenario. Two distinct models were developed to explore the concept and its applicability. The first model, smaller in scale, served to demonstrate the fundamental concept of utilizing intelligent bolts for deformation monitoring and wedge detection. This model was designed with specific configurations of intelligent bolts and sensor placements. Subsequently, a larger scale model was constructed to further explore the concept and additional capabilities. This larger model was structured to show bigger scale and more wedges in the same drift, allowing for a more comprehensive assessment of the effectiveness of intelligent bolts in deformation monitoring. The study showed the effect of varying the number of intelligent bolts deployed within the model. By visualizing different quantities of bolts, insights were gained into the scalability and practical implications of employing intelligent bolt technology for deformation monitoring. Based on the findings, recommendations were made for determining the optimal sensor density based on the parameters involved. These recommendations aim to guide future research and practical applications in the field of deformation monitoring using intelligent bolt technology.
3.1 Theoretical Case Scenario Intelligent Rock Bolt
The approach begins with defining a perfect case scenario and subsequently devising strategies to achieve it or closely approach its goal. Several assumptions are outlined to form this idealized scenario: bolts are flawlessly straight in their installation, free from corrosion; the sensor remains undamaged and does not have any production-related impairments; precision and accuracy in readings distinctly manifest deformation peaks near discontinuities and weak points; seamless and error-free data delivery is ensured; background noise is absent from readings. Moreover, for numerical simulation purposes, the rock mass in question comprises elastic, intact rock intermixed with straight joints. Starting from this point, we can pave the way for further problem-solving and collect valuable insights towards practical solutions. Sensors like strain gauges, piezoelectric sensors and fibre optics can be used for monitoring the critical status of rock bolts, such as the axial force, corrosion occurrence, grout quality, and resin delamination.
3.2 Spatial Resolution and Sensor Density
The investigation involved varying the quantity of sensors per bolt within the range of 1–20. The utilization of a singular sensor per bolt is connected to the mechanically anchored rock bolt system and it can be used to assess the bolt's condition and total deformation. One sensor can already provide valuable data, facilitating the identification of specific areas exhibiting varying states of deformation within the comprehensive network of installed bolts. The comparative analysis of these localized deformations against anticipated values offers insights into the structural integrity of the system.
An alternative approach explored in this research involved the integration of multiple sensors on each bolt. Unlike expansion shell bolts, which are mechanically anchored and connected to the rock mass only at the edges, grouted rebar establishes continuous contact with the rock mass through a grout interface. Grouted rebar bolts are capable of withstanding both shear and axial deformation, whereas expansion shells are limited to axial deformation.
With the addition of more bolts, the combination of grouted rebar with a multi-sensor design showed deformation distribution along the bolt tendon, contributing to a more uniform distribution throughout the mining structure. The incorporation of multiple sensors on bolts deployed across the mining site can indicate structural features, such as layers or joints (Varelija et al. 2023).
3.3 Model of the Rock Mass
Rock mass modelling has three basic approaches: continuum, discontinuum, and hybrid. Modelling blocky rock mass for deformation analysis requires a discontinuum approach because the material deformation depends on two factors: deformation of the blocks and deformation of the joints and in this case, dominant deformations are coming from joints. The discrete element method (DEM) was used to create the numerical model because of the discontinuity-driven behaviour (Lemos 2023; Scholtès and Donzé 2013). The geometry of the model is one simple underground drift and joint sets are shown in Fig. 4. Intact rock was represented by elastic material with Young's Modulus 20GPa and Poisson coefficient of 0.3. Joint behaviour is modelled with Mohr Coulomb criteria with cohesion 0.5MPa, and friction angle 34 degrees.

3D model of the mine drift geometry and one wedge formation (yellow)
Rock bolts were simulated as grouted rebar bolts which enables multiple sensors for deformation distribution along the tendon. They have both a mechanical component and a grouting component. The combination of these two components makes them more effective in stabilizing the ground. Figure 5 shows Itasca's Hybrid Bolts and the ‘sel hybrid’ command are used as tools for modelling the intelligent bolts for supporting and identifying roof wedges (Itasca Consulting Group, Inc.). It presents the basic principle of the function: (a) axial steel stiffness, (b) node point, (c) cohesive strength of the grout, (d) shear grout stiffness, and (e) grout.

Structure of the hybrid bolt in the numerical simulation (Itasca Consulting Group, Inc.)
3.4 Data Handling and Analysis
NumPy incorporated in 3DEC is utilised to collect data from rock bolt nodes. NumPy is a robust numerical computing package developed in Python that is well-known for its array-based and mathematical functions (Oliphant 2006). It provides a solid framework for dealing with big datasets, making it ideal for analysing and processing data collected from intelligent rock bolts. This interface allows us to retrieve data generated from simulated intelligent rock bolt sensors directly from the 3DEC model.
Processing and preparation are required to adequately visualise data, as raw data output manifests in the form of coordinates illustrating node movements. This, however, varies from how actual bolts generate data. Real bolts transmit sensor stripe deformations, leading to our decision to conduct data conversion. The data produced from numerical modelling is almost perfect, with no examples of missing bolts or data loss.
To align the numerical model data as closely as possible with real-world data, the conversion process involves translating coordinate movements into sensor-based deformations using the Euclidean distance formula for points in the Cartesian coordinate system. The Euclidean distance formula provides the straight-line distance between two points in Euclidean space (Artin 1988). As illustrated in Fig. 6, the left side depicts the simulation output, showcasing the movement of each point in the coordinate system. On the right side, the sensors are represented, with each sensor providing elongation data:

Comparison of numerical simulation output (left) and sensors on intelligent rock bolts (right)
Spyder IDE (Integrated Development Environment) in Python 3.9, in conjunction with the Pandas package, is an ideal option for data analysis, notably for computing the standard deviation to discover outliers, which in this case are read as wedges (Raybaut 2017). Pandas is a Python module that allows for quick and easy data manipulation and analysis. It simplifies data representation and processing using its DataFrame data structure and is an effective tool for processing large data sets because of its ability to execute operations like filtering, aggregation, and transformation with simple syntax (McKinney 2011). The standard deviation is an important statistical indicator for spotting outliers, which are data points that deviate considerably from the rest of the data (Altman and Bland 2005). Data points that indicate wedges in rock formations might be regarded as outliers in this application. The study is particularly interested in wedges created by geological discontinuities or structural instabilities. Spyder has visualisation capabilities, including libraries Pyplot and Seaborn, enabling us to view the overall data as well as the observed outliers (Waskom 2021)). Data visualisation helps to acquire a better understanding of wedge formation. These insights are useful for making educated judgements in geotechnical engineering or related domains.
4 Sensor Density and Data Availability: A Simulation Study
This chapter presents the relationship between the number of sensors used in intelligent rock bolt and data availability. The simulated data offers information about sensor configurations. The quantity of available data is inherently tied to the number of sensors deployed in the simulation. A higher number of sensors contribute to increased data points, providing a more comprehensive understanding of the environment. Conversely, a lower sensor density results in less data, limiting the detail of the analysis. A higher sensor density affords a more complete and detailed understanding of the intelligent rock bolt's deformations, while fewer sensors may limit the depth of insights derived from the data.
Two models were created for this study: the first proved the hypothesis—a wedge can be detected with intelligent rock bolts, and the second extended the idea to include data visualisation in the event of multiple wedges in a single tunnel.
The first model is smaller in size and has a single wedge secured with 4 bolts per profile. The second model is more complex, with three separate wedges modelled in the drift roof and containing six bolts per profile. These models show differences in sensor density per bolt and how those differences affect the resulting profile configurations, making it easier to determine the number of sensors needed for efficient wedge detection. It's also important to note that the first model has an inter-profile (distance between two bolt profiles) distance of two metres, while the second model has a smaller inter-profile distance of 1 m.
4.1 First Model-One Wedge in the Tunnel
The numerical model presented in this chapter shows a basic wedge shape supported by rock bolts. In our simulation, each bolt is an intelligent bolt. This means we gather data about how each bolt moves, and later, we pick out specific data points to analyse. The bolts have measuring points every 10 cm. However, during data processing, we group these points to present a different number of sensors per bolt. The first version of our model features a single wedge shape with rock bolts set in a grid measuring 1 by 2 m. From this setup, we obtain data that we can examine in two different ways.
First, we can focus on just one bolt. We observe its behaviour along the tendon. By adjusting the number of sensors on each bolt, we investigate how this affects the data. This exploration helps us determine the optimal number of sensors needed for useful insights.
Second, we broaden our view to show one section of the tunnel. Here, we observe four bolts together in one profile. This broader perspective allows us to understand how the collective behaviour of all the bolts influences the deformation in the tunnel. These approaches to analysing the data provide insights into what the data looks like in different scenarios.
4.1.1 One Intelligent Rock Bolt Per Profile
If we consider just one intelligent rock bolt per profile, we can observe the longitudinal deformation profile. Figure 7 shows the bolt setup from the top view and the 3D view of the tunnel with the cutting plane. The wedge is shown as a yellow triangle, surrounded by installed rock bolts represented as black dots, and intelligent bolts represented by blue squares.

Top view of the tunnel (right) with the wedge and rock bolts and the 3D view (left) cross sections position is outlined, intelligent rock bolts are blue squares (ID number: 2, 6, 10, 14, 18) other bolts in black are normal rock bolts
Figure 8 shows the case of a rock bolt grid 1 × 2 m with a possibility for a 4 m wedge to be intercepted by only one bolt and in that case it is difficult to interpret if the deformation reading indicated a wedge failure, faultline or just one bolt malfunctioning. For that reason is better to have a denser measuring network than only one intelligent bolt per profile. In cases where only one bolt is deformed unexpectedly more than others in the same area, a manual visual inspection of the site would be advisable to discover the cause of that behaviour and if the wedge is discovered during that inspection, further supporting and monitoring measures could be implemented (depending on the specific case).

Position of the wedge when intersected by only one intelligent rock bolt: a wedge, b intelligent rock bolt, c rock bolt
Figure 9 shows deformation data of one profile with different number of sensors per bolt: (a) 1 sensor per bolt, (b) 3 sensors per bolt, (c) 5 sensors per bolt and (d) 10 sensors per bolt. The x-axis shows the bolt ID and the y-axis the sensors installed on each bolt, the grayscale legend on the side of every individual graph represents the deformation magnitude. Spatial overview of the data and precision increases with the number of sensors per bolt. One sensor per bolt can show if the bolt has failed and how much it deformed over time and with more sensors per bolt deformation distribution along the bolt. This model has 2.5 m long bolts (in terms of sensors per meter: one sensor per bolt equals 0.4 sensors per meter, 3 sensors equals 1.2 sensors per meter, 5 sensors equals 2 sensors per meter of the bolt).

Difference of ‘resolution’ in number of sensors per bolt in one profile with 4 bolts, figure a 1 sensors per bolt, b 3 sensors per bolt, c 5 sensors per bolt, d 10 sensors per bolt—displacements showed in black correspond to the wedge position. Individual legends on the side of each graph show deformation [m]
4.1.2 Four Intelligent Rock Bolts Per Profile
This chapter presents the case with four bolts per profile Fig. 10, spaced at intervals of 2 m (forming a network of 1 × 2 m). The results demonstrate the connection between the quantity of sensors and the simulation's final results. In this case, there are four times more sensors than in the first case. Sensor data can be shown either independently for each profile or integrated into a 3D model. Figure 11 represents a profile, focusing on the comparative analysis of sensors per bolt with 2.5m long bolts. Sensor quantities (1, 3, 5, and 10 sensors per bolt, sensors per meter: one sensor per bolt equals 0.4 sensors per meter, 3 sensors equal 1.2 sensors per meter, 5 sensors equal 2 sensors per meter of the bolt) are analysed to provide greater detail of how they affect the results. There is hardly any difference between 10 and 20 sensors. The use of 10 sensors has already produced a meaningful outcome so it is unnecessary to use 20 sensors per bolt for the particular goals being considered. It appears that even a small number, like three sensors per bolt, produces a sufficiently distributed spatial characterization along the bolt's axis, and the extra sensors primarily improve resolution rather than significantly change the underlying understanding. Moreover, increasing the number of bolts in the system makes it more reliable. In the case one or two bolts fail, other parts function as suitable substitutes, enhancing the system's overall reliability. Optimising the precision and robustness of the intelligent rock bolt simulation requires careful consideration of the multi-bolt configuration.

Top view of the tunnel (right) with the wedge and rock bolts and the 3D view (left) cross sections position is outlined, intelligent rock bolts are blue squares

Difference of ‘resolution’ in a number of sensors per bolt in one profile with 4 bolts, figure a 1 sensor per bolt, b 3 sensors per bolt, c 5 sensors per bolt, d 10 sensors per bolt—displacements showed in black correspond to the wedge position. Individual legends on the side of graphs show deformation [m]
4.2 Second model—Multiple wedges in one tunnel
The initial model highlighted a potential issue: smaller wedges, less than 4 m in size, could go unnoticed when employing just one intelligent rock bolt per profile. To address this concern, the mesh of bolts in the second model was adjusted to a denser 1 × 1 m grid. The second model contains three roof wedge formations of varying sizes and shapes, as illustrated in Fig. 12. The geometrical parameters of the wedges can be found in Table 1. This expanded model allows us to explore how the presence of multiple wedges influences the deformation within the tunnel or drift. By visualizing the data generated from this model, we gain insights into how different wedge configurations impact the deformation profiles gathered by intelligent rock bolts.

Model of the mine drift geometry and three wedge formations (yellow)
Figure 13 provides a visual representation of the positions and geometries of the wedges studied, while Fig. 14 displays the corresponding deformation results at these locations. With this model, we show the ability to discern the sizes of the wedge formations. This capability enables us to assess whether adequate support is provided or if additional reinforcement is needed. Notably, the adoption of a denser mesh of 1 × 1 m bolts proves advantageous for detecting wedges, since here we have more sensors. Consequently, the risk of undetected wedges is reduced significantly. We should think about how many sensors we need on each bolt, depending on how many intelligent bolts we have. This is important because it affects how well we can detect wedges. If we have lots of intelligent bolts close together, we might not need as many sensors on each bolt to spot wedges. This highlights the importance of finding the right balance between the number of intelligent bolts and the number of sensors on each bolt. In scenarios characterized by a high density of intelligent bolts, it becomes feasible to employ fewer sensors per bolt while still ensuring the quality of data. This underscores the importance of a balance between the density of intelligent bolts and the number of sensors to optimize the efficiency of the detection system.

Intelligent rock bolt layout (all bolts are intelligent)—intersected with the red cutting plane

Difference of ‘resolution’ in a number of sensors per bolt in one profile with 6 bolts, figure a 1 sensor per bolt, b 4 sensors per bolt, c 10 sensors per bolt—displacements shown in black correspond to the wedge position
Observing the mesh of 1 × 1 m with 6 bolts per profile, we observe that even the placement of just one sensor per bolt can effectively signal areas of deformation within the structure. However, as we increase the number of sensors per bolt, there is an improvement in resolution, allowing for more precise identification of wedge formations. Sensor quantities on the 2 m long bolts in this model (1, 4, and 10 sensors per bolt, sensors per meter: one sensor per bolt equals 0.5 sensors per meter, 4 sensors equal 2 sensors per meter, 10 sensors equal 5 sensors per meter of the bolt) are analysed to provide greater detail of how they affect the results. This progression towards increased sensor density offers a better overview of structural behaviour. With each additional sensor, we gain finer granularity in our data, enabling us to discern subtle variations and anomalies indicative of potential wedge formations. It becomes apparent that with 3–4 sensors per bolt, we strike a balance where we achieve sufficient sensitivity to detect these formations.
5 Requirements for Determining Optimal Sensor Density
This chapter presents an integrated approach to intelligent rock bolt design and monitoring, following a series of steps that need to be considered for optimal monitoring and risk mitigation. Determining the optimal resolution for intelligent rock bolts involves considering various factors and trade-offs based on the specific application and requirements. The following steps demonstrate the decision-making process that may assist in designing the intelligent rock bolt network (Fig. 15):
-
I.
Characterization of the Rock Mass

Requirements for the decision process on a number of sensors and or bolts is needed for a specific case
Characterization of the rock mass through standard procedures. Geological factors such as rock type, strength, joint orientation, and discontinuity spacing are evaluated to establish a comprehensive understanding of the inherent stability and behaviour of the rock mass. Identify the potential consequences of structural failure or deformation in the given application. In tunnels excavated within blocky rock masses at relatively shallow depths, the most common failure modes are wedges dislodged from the roof or sliding from the sidewalls. These wedges are defined by intersecting structural features, such as bedding planes and joints. Higher risk environments require higher resolution. The largest possible wedge size within the tunnel is determined. This parameter serves as the foundation for subsequent analyses and design considerations.
-
II.
Determining Sensor Placement and Density
Tailoring the sensor placement and density to the specific objectives of the measurements is essential. Depending on the desired outcomes, the number of sensors per bolt is adjusted accordingly. From precise structural analysis to detecting wedge formations, the sensor density is optimized to provide actionable insights into the structural dynamics. Determining the optimal resolution for intelligent rock bolts involves considering various factors and trade-offs based on the specific application and requirements. The following steps demonstrate the decision-making process that may assist in designing the intelligent rock bolt network.
-
A.
Determine if the use case is a civil engineering project or a mining operation. The requirements may vary based on the environment and potential risks.
-
B.
Identify the potential consequences of structural failure or deformation in the given application. Higher risk environments require higher resolution.
-
C.
Consider the type of data that needs to be collected; it is important to determine if it going to be used as an early warning sign of deformation, or for detailed information about the magnitude and rate of deformation.
-
D.
Evaluate the existing mesh of rock bolts in the site monitored and at which spatial distribution intelligent rock bolts may be integrated into this existing mesh. Higher resolution may be necessary for areas where deformation is more likely to occur.
-
E.
Assess the cost implications of higher resolution monitoring with regards to the fact that more sensors are more expensive to deploy and maintain, with that also considering the capacity for data transmission and storage. High-resolution data require more bandwidth and storage resources.
-
F.
Determine the capabilities of data analysis tools and whether they can handle high-resolution data effectively and understand the capabilities of the intelligent rock bolts available in the market. Some intelligent rock bolts may in the future offer adjustable resolution settings. In the end, it is important to perform field tests to evaluate the performance of intelligent rock bolts at different resolutions in specific environments. It could be an iterative process to find the right balance between resolution, cost, and data quality. There might be a need for fine-tuning the resolution based on real-world data and experience.
-
III.
Positioning of Measuring Bolts
The positioning of measuring bolts within the grid of normal rock bolts is planned based on the structure's characteristics and the desired quantity and distribution of readings. This strategic placement ensures comprehensive coverage and effective monitoring of critical areas, enhancing the reliability of the monitoring system. More intelligent bolts could be installed in important sections or where more deformation is expected.
-
IV.
Post-installation Analysis
Following the installation of measuring bolts and initial readings, a recalibration of the factor of safety and bolt utilization capacity is performed. This iterative process allows for adjustments based on real-time data, ensuring ongoing stability and safety while proactively addressing emerging risks.
-
V.
Visualization and Monitoring
The acquired data is visualized spatially to observe changes over time. This dynamic visualization enables the detection of trends, anomalies, and potential areas of concern, facilitating informed decision-making and proactive intervention to mitigate risks and optimize structural performance.
-
VI.
Comparing the Visualized Result with the Characterisation of the Rock Mass
This step serves as a validation of the first received data and calibrating the system. Checking if there is a need for more bolts, or if the system is overdesigned. In case too many bolts have been used the number could be reduced.
Long-term maintenance and data management are also very important in the end. Will high-resolution data be sustainable and useful over the long term? Ultimately, the optimal resolution for intelligent rock bolts will depend on the unique characteristics of each project and risk tolerance. Balancing costs, data quality, and application-specific requirements is essential in making this decision. It's also important to stay updated on advancements in intelligent rock bolts technology, as newer models may offer improved features.
5.1 Estimation of Optimum Sensor Density According to a Specific Case
When dealing with a layered rock mass and aiming to detect both the location of layers and deformation along the contacts, a higher number of sensors is necessary. The exact quantity depends on the thickness of the layers and can reach any number between 5 and 10 (Varelija et al. 2023).
In scenarios involving a blocky rock mass where wedge formations are anticipated, a minimum of three sensors per bolt is required, especially when there's only one intelligent rock bolt per profile. However, if every rock bolt within the profile is intelligent, a single sensor per bolt might suffice to identify unstable blocks, especially when visualized from a top-view perspective.
Intact rock mass or situations where determining the internal structure of the rock is not necessary, just one sensor per bolt is adequate. This setup provides a general overview of the deformations occurring during excavation and the utilization of support measures.
The sensor density can be calculated by the following formula:
Because this field of research is still in its early stages, the availability of equipment customised to its needs is limited, highlighting the need for additional real-world testing of the suggested hypothesis (Eliasson et al. 2013; Kolapo et al. 2022; Song et al. 2017). Adding to the issue is the high cost of the few existing devices, making them unsuitable for widespread use in the mining industry. In response to these limitations, ongoing efforts are underway to address this gap through the development of a prototype device featuring a streamlined configuration comprising one sensor per bolt. Initial findings from the testing phase offer encouraging results, pointing to the potential efficacy of this approach in monitoring geological dynamics and enhancing safety protocols within mining operations. Despite these promising developments, it's important to note that this innovative device has yet to reach commercial availability. As such, continued research and refinement are essential to further validate its functionality and reliability under diverse operational conditions. Only through rigorous testing and iterative improvements can this technology be positioned for broader adoption, ultimately driving advancements in safety and efficiency across the mining industry.
It is possible to determine the bolt utilization based on the specifications provided for the rock bolt. This typically involves comparing the actual load experienced by the bolt to its designed capacity. The formula for bolt utilization can be expressed as
6 Conclusion
In the field of geotechnical engineering and rock mechanics, the accurate assessment and prediction of gravity-driven failures in wedge formations are important for ensuring the safety and stability of underground excavations. To address this critical issue, our research aimed to employ numerical simulation techniques in combination with intelligent rock bolts to capture and analyse these failures accurately. This work presents the results of our study, highlighting the utilization of deformation measurements derived from intelligent rock bolts.
The results show a relationship between sensor density and effective recognition of roof wedges. Higher sensor density improves the system's capacity to identify possible wedges early on and offers more reliable data on rock mass movements. The optimal sensor density has been discovered to be dependent on a variety of criteria, including the number of intelligent rock bolts inside a single region (profile) and the overall number of profiles within the mine, also a specific requirement from the mining site. Findings highlight the critical relevance of establishing 'optimum sensor density' for intelligent rock bolting in mining operations. We may identify gravity-driven problems, such as roof wedges, at an early stage by strategically placing a sufficient number of intelligent rock bolts. This allows for immediate proactive measures. Implementing an acceptable sensor density not only improves safety but also enables informed decision-making in optimising mine support layouts to protect miners from possible risks and maintain a safe working environment.
The study proposes carrying out controlled tests in mining sites to assess the link between sensor density and the precise detection of roof wedges, which could represent a danger of falling and inflicting damage. A series of experiments should be carried out, with the number of intelligent rock bolts and their spatial distribution throughout the mining region being varied. The development of predictive models for early warning systems based on the data collected. Additionally, the application of artificial intelligence and machine learning algorithms to analyse real-time data could enhance the accuracy of predictions and decision-making in geotechnical engineering. Predicting the optimal position of smart bolts could potentially be extended by knowledge acquired on site and during the process of bolt installation. E.g. measurement while drilling (MWD) data could be useful in identifying disturbances and the deployment pattern could be adjusted accordingly. A drill hole that shows no discontinuity during the drilling process is a less favourable candidate for a smart bolt. In that sense, sensor fusion is the next logical step to expand our measuring system by including additional sources of information like MWD into the decision process. Further research should also include simulating the impact of other failure modes on the deformation data.
Data availability
Not applicable.
References
Altman DG, Bland JM (2005) Standard deviations and standard errors. BMJ 331:903. https://doi.org/10.1136/bmj.331.7521.903
Artin E (1988) Geometric Algebra. Wiley
Bharti S, Jemishkumar M, Kumar R (2014) Performance of Grouted Rock Bolts in Rock Mass. Proceedings of the National Seminar on Recent Trends in Mechanized Mining, Kothagudem, Telangana
Cao C, Nemcik J, Aziz N, Ren T (2012) Failure modes of rock bolting. In Proceedings of the 12th Underground Coal Operators’ Conference:137–152
Dr. Cundall and Itasca (2024) 3DEC: Software for Analysis of Rock Simulation and Soil Dynamics in 3D. Itasca
Eliasson J, Delsing J, Raayatinezhad A, Kyusakov R (2013) 2013 IEEE International Conference on Industrial Technology (ICIT). IEEE
Fortsakis P, Nikas K, Marinos V, Marinos P (2012) Anisotropic behaviour of stratified rock masses in tunnelling. Eng Geol 141–142:74–83. https://doi.org/10.1016/j.enggeo.2012.05.001
Fuławka K, Pytel W, Szumny M, Mertuszka P, Pałac-Walko B, Hartlieb P, Varelija M, Nöger M (2022) Prototype of instrumented rock bolt for continuous monitoring of roof fall hazard in deep underground mines. Sensors (basel). https://doi.org/10.3390/s23010154
Fuławka K, Stolecki L, Szumny M, Pytel W, Jaśkiewicz-Proć I, Varelija M, Nöger M, Hartlieb P (2022b) Roof fall hazard monitoring and evaluation—State-of-the-art review. Energies 15:8312. https://doi.org/10.3390/en15218312
Hoek E (2000) Practical Rock Engineering
Hoek E (2006) Practical Rock Engineering: Rock bolts and cables
Hoek E, Kaiser PK, Bawden WP (1995) Support of Underground Excavation in Hard Rock
Høien AH, Li CC, Zhang N (2021) Pull-out and critical embedment length of grouted rebar rock bolts-mechanisms when approaching and reaching the ultimate load. Rock Mech Rock Eng 54:1431–1447. https://doi.org/10.1007/s00603-020-02318-6
Johnson JC, Brady T, Larson M (1999) Use of Strain-Gauged Rock Bolts to Measure Rock Mass Strain During Drift Development. In: Conference: Proceedings, SARES99: 2nd Southern African Rock Engineering Symposium, Johannesburg, South Africa
Kaiser PK, Cai M (2012) Design of rock support system under rockburst condition. J Rock Mech Geotech Eng 4:215–227. https://doi.org/10.3724/SP.J.1235.2012.00215
Kolapo P, Onifade M, Praise OA (2022) An overview of the use of rockbolts as support tools in mining operations. Geotech Geol Eng 40:1637–1661. https://doi.org/10.1007/s10706-021-02005-5
Lemos JV (2023) Application of bonded-block models to rock failure analysis. Appl Sci 13:12207. https://doi.org/10.3390/app132212207
Li CC (2017) Principles of rockbolting design. J Rock Mech Geotech Eng 9:396–414. https://doi.org/10.1016/j.jrmge.2017.04.002
Lu L, Wang ZJ, Song ML, Arai K (2015) Stability analysis of slopes with ground water during earthquakes. Eng Geol 193:288–296. https://doi.org/10.1016/j.enggeo.2015.05.001
McKinney W (2011) pandas: A foundational python library for data analysis and statistics. Python High Performance Science Computer
Nöger M, Varelija M, Hartlieb F, Paterek M, Kobylanska M, Pikuła M, Bursa B, Rody M, Mosberger R (2023) D4.4 The safe zone concept: Improved safety and environmental performance. https://doi.org/10.5281/zenodo.10638954
Oliphant TE (2006) Guide to NumPy
Ömer A (2018) Rock Reinforcement and Rock Support, vol 6. ISRM Book Series
Palmstrom A, Stille H (2007) Ground behaviour and rock engineering tools for underground excavations. Tunn Undergr Space Technol 22:363–376. https://doi.org/10.1016/j.tust.2006.03.006
Raybaut P (2017) Spyder Documentation
Schneider AH (2002) Sicherheit Gegen Niederbruch Im Untertagbau. PhD Thesis, ETH Zürich
Scholtès L, Donzé FV (2013) A DEM model for soft and hard rocks: role of grain interlocking on strength. J Mech Phys Solids 61:352–369. https://doi.org/10.1016/j.jmps.2012.10.005
Schubert W, Goricki A, Button EA, Riedmüller G, Pölsler P, Steindorfer A, Vanek R (2001) Excavation and support determination for the design and construction of tunnels. Felsbau (Eng Geol) 19:85–92
Shapka-Fels T, Elmo D (2022) Numerical modelling challenges in rock engineering with special consideration of open pit to underground mine interaction. Geosciences 12:199. https://doi.org/10.3390/geosciences12050199
Song G, Li W, Wang B, Ho SCM (2017) A review of rock bolt monitoring using smart sensors. Sensors (basel). https://doi.org/10.3390/s17040776
Stillborg B (1993) Rockbolt tensile loading across a joint. International Mine Water Association Symposium Zambia
Terzaghi K (1946) Rock defects and loads on tunnel supports. Open J Civil Eng 7(1):95
U.S. Department of Interior Bureau of Mines Staff (1987) Comparative Study of Rock Support Systems for a High Level Nuclear Waste Geologic Repository in Salt
Varelija M, Nöger M, Hartlieb F, Dendl D, Moser P (2023) The effect of different rock mass properties on deformation distribution detected with intelligent rock bolts in underground mining. In: 15th International ISRM Congress 2023 & 72nd Geomechanics Colloquium
Waclawik P, Snuparek R, Kukutsch R (2017) Rock bolting at the room and pillar method at great depths. Procedia Eng 191:575–582. https://doi.org/10.1016/j.proeng.2017.05.220
Wasantha PLP, Ranjith PG, Viete DR (2014) Effect of joint orientation on the hydromechanical behavior of singly jointed sandstone experiencing undrained loading. J Geophys Res Solid Earth 119:1701–1717. https://doi.org/10.1002/2013JB010600
Waskom M (2021) Seaborn: statistical data visualization. JOSS 6:3021. https://doi.org/10.21105/joss.03021
Zheng D, Frost JD, Huang RQ, Liu FZ (2015) Failure process and modes of rockfall induced by underground mining: a case study of Kaiyang phosphorite mine rockfalls. Eng Geol 197:145–157. https://doi.org/10.1016/j.enggeo.2015.08.011
Funding
Open access funding provided by Montanuniversität Leoben. The funding was supported by Horizon 2020 Framework Programme, 869379.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Varelija, M., Hartlieb, P. Designing Intelligent Rock Support Systems to Detect Gravity-Driven Wedges. Rock Mech Rock Eng (2024). https://doi.org/10.1007/s00603-024-04039-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00603-024-04039-6