
Abstract
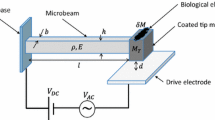
This article presents a method for quantitative estimation of the mass of an entity attached to the surface of an electrostatically actuated clamped-free microbeam implemented as a mass sensor. For this investigation, the microbeam is modeled as a Euler–Bernoulli beam taking into account the effects of electrostatic nonlinearity, viscous energy dissipation together with the effect of the fringing field capacitance. A modal superposition technique is used to simulate the dynamic response of the microcantilever. The dynamic pull-in voltage of microcantilever is evaluated using a developed modal. The present dynamic pull-in voltage results are compared with the existing results and on the basis of comparison, the accuracy of the developed model is ascertained. For mass quantification, firstly, an input shaping technique is employed to stabilize the microbeam at the specified position and then voltage perturbation is induced to make the system sensitive to inertial change. A parasitic mass expressed as a fraction of the total mass of the beam is then added resulting in an increase in the amplitude of vibration and hence an alteration in the capacitance. An empirical relation between the added mass and the change in capacitance is proposed.






Similar content being viewed by others
References
Aluru NR (1999) A reproducing kernel particle method for meshless analysis of microelectromechanical systems. Comput Mech 23(4):324–338
Bargatin I, Kozinsky I, Roukes ML (2007) Efficient electrothermal actuation of multiple modes of high-frequency nanoelectromechanical resonators. Appl Phys Lett 90(9):093116
Beardslee LA, Addous AM, Heinrich S, Josse F, Dufour I, Brand O (2010) Thermal excitation and piezoresistive detection of cantilever in-plane resonance modes for sensing applications. J Microelectromech Syst 19(4):1015–1017
Bedair SS, Fedder GK (2009) Picogram material dosing of microstructures. J Appl Phys 106(10):104913
Borovic B, Liu AQ, Popa D, Cai H, Lewis FL (2005) Open-loop versus closed-loop control of mems devices: choices and issues. J Micromech Microeng 15(10):1917
Bouchaala A, Nayfeh AH, Jaber N, Younis MI (2016a) Mass and position determination in mems mass sensors: a theoretical and an experimental investigation. J Micromech Microeng 26(10):105009
Bouchaala A, Nayfeh AH, Younis MI (2016b) Frequency shifts of micro and nano cantilever beam resonators due to added masses. J Dyn Syst Meas Control 138(9):091002
Burg TP, Mirza AR, Milovic N, Tsau CH, Popescu GA, Foster JS, Manalis SR (2006) Vacuum-packaged suspended microchannel resonant mass sensor for biomolecular detection. J Microelectromech Syst 15(6):1466–1476
Chaterjee S, Pohit G (2009) A large deflection model for the pull-in analysis of electrostatically actuated microcantilever beams. J Sound Vib 322(4–5):969–986
Craighead H (2007) Nanomechanical systems: measuring more than mass. Nat Nanotechnol 2(1):18
Dai MD, Eom K, Kim C-W (2009) Nanomechanical mass detection using nonlinear oscillations. Appl Phys Lett 95(20):203104
De SK, Aluru NR (2004) Full-Lagrangian schemes for dynamic analysis of electrostatic mems. J Microelectromech Syst 13(5):737–758
Dohn S, Svendsen W, Boisen A, Hansen O (2007) Mass and position determination of attached particles on cantilever based mass sensors. Rev Sci Instrum 78(10):103303
Durieu F, Bruls O, Rochus V, Serandour G, Golinval JC (2008) Reduced order modeling of electrostatically actuated microbeams. In: Proceedings of the 6th EUROMECH nonlinear dynamics conference (ENOC), pp 1–6
Erturk A, Inman DJ (2011) Piezoelectric energy harvesting. Wiley, Hoboken
Godara RK, Joglekar MM (2015) Mitigation of residual oscillations in electrostatically actuated microbeams using a command-shaping approach. J Micromech Microeng 25(11):115028
Godara RK, Joglekar MM (2016) Mitigation of contact bounces in electrostatically actuated nonprismatic microbeams. Micro Nanosyst 8(2):99–113
Godara RK, Joglekar MM (2017) Alleviation of residual oscillations in electrostatically actuated variable-width microbeams using a feedforward control strategy. Microsyst Technol 23(10):4441–4457
Godara RK, Joglekar MM (2018) Suppression of contact bounce in beam-type microelectromechanical switches using a feedforward control scheme. J Vib Control 24(23):5502–5513
Greenberg MD (1998) Advanced engineering mathematics. Prentice-Hall, New Jersy
Gupta A, Akin D, Bashir R (2004a) Single virus particle mass detection using microresonators with nanoscale thickness. Appl Phys Lett 84(11):1976–1978. https://doi.org/10.1063/1.1667011
Gupta A, Akin D, Bashir R (2004b) Single virus particle mass detection using microresonators with nanoscale thickness. Appl Phys Lett 84(11):1976–1978
Gupta A, Akin D, Bashir R (2004c) Detection of bacterial cells and antibodies using surface micromachined thin silicon cantilever resonators. J Vac Sci Technol B: Microelectron Nanometer Struct Process, Meas, Phenom 22(6):2785–2791
Hanay M, Kelber S, Naik AK, Chi D, Hentz S, Bullard EC, Colinet E, Duraffourg L, Roukes ML (2012) Single-protein nanomechanical mass spectrometry in real time. Nat Nanotechnol 7(9):602
Ilic B, Craighead HG, Krylov S, Senaratne W, Ober C, Neuzil P (2004) Attogram detection using nanoelectromechanical oscillators. J Appl Phys 95(7):3694–3703
Jensen K, Kim K, Zettl A (2008) An atomic-resolution nanomechanical mass sensor. Nat Nanotechnol 3(9):533
Joglekar MM, Pawaskar DN (2011) Closed-form empirical relations to predict the dynamic pull-in parameters of electrostatically actuated tapered microcantilevers. J Micromech Microeng 21(10):105014
Johnson BN, Mutharasan R (2012) Biosensing using dynamic-mode cantilever sensors: a review. Biosens Bioelectron 32(1):1–18
Khater ME, Vummidi K, Abdel-Rahman EM, Nayfeh AH, Raman S (2011) Dynamic actuation methods for capacitive mems shunt switches. J Micromech Microeng 21(3):035009
Kim D, Hong S, Jang J, Park J (2013) Simultaneous determination of position and mass in the cantilever sensor using transfer function method. Appl Phys Lett 103(3):033108
Kouravand S (2011) Design and modeling of some sensing and actuating mechanisms for mems applications. Appl Math Model 35(10):5173–5181
Kumar V, Boley JW, Yang Y, Ekowaluyo H, Miller JK, Chiu GT-C, Rhoads JF (2011) Bifurcation-based mass sensing using piezoelectrically-actuated microcantilevers. Appl Phys Lett 98(15):153510
Li H, Wang QX, Lam KY (2004) A variation of local point interpolation method (vlpim) for analysis of microelectromechanical systems (mems) device. Eng Anal Bound Elem 28(10):1261–1270
Li Y, Meguid SA, Fu Y, Xu D (2013) Unified nonlinear quasistatic and dynamic analysis of rf-mems switches. Acta Mech 224(8):1741–1755
Lochon F, Dufour I, Rebiere D (2005) An alternative solution to improve sensitivity of resonant microcantilever chemical sensors: comparison between using high-order modes and reducing dimensions. Sens Actuators B: Chem 108(1–2):979–985
Maraldo D, Mutharasan R (2010) Mass-change sensitivity of high-order mode of piezoelectric-excited millimeter-sized cantilever (pemc) sensors: theory and experiments. Sens Actuators B: Chem 143(2):731–739
Meirovitch L (2010) Fundamentals of vibrations. Waveland Press, Long Grove
Olcum S, Cermak N, Wasserman SC, Manalis SR (2015) High-speed multiple-mode mass-sensing resolves dynamic nanoscale mass distributions. Nat Commun 6:7070
Rhoads JF, Shaw SW, Turner KL (2009) Nonlinear dynamics and its applications in micro-and nanoresonators. In: ASME 2008 dynamic systems and control conference, pp 1509–1538, American Society of Mechanical Engineers Digital Collection
Rhoads JF, Shaw SW, Turner KL (2010) Nonlinear dynamics and its applications in micro-and nanoresonators. J Dyn Syst Meas Control 132(3):034001
Schmid S, Dohn S, Boisen A (2010) Real-time particle mass spectrometry based on resonant micro strings. Sensors 10(9):8092–8100
Sharma AK (2020) Design of a command-shaping scheme for mitigating residual vibrations in dielectric elastomer actuators. J Appl Mech 87(2):021007
Sharma AK, Godara RK, Joglekar MM (2019) Static and dc dynamic pull-in analysis of curled microcantilevers with a compliant support. Microsyst Technol 25(3):965–975
Tang WC, Nguyen T-CH, Howe RT (1989) Laterally driven polysilicon resonant microstructures. Sens Actuators 20(1–2):25–32
Waggoner PS, Craighead HG (2007) Micro-and nanomechanical sensors for environmental, chemical, and biological detection. Lab Chip 7(10):1238–1255
Yang Y-T, Callegari C, Feng XL, Ekinci KL, Roukes ML (2006) Zeptogram-scale nanomechanical mass sensing. Nano Lett 6(4):583–586
Younis MI (2011) MEMS linear and nonlinear statics and dynamics, vol 20. Springer, Berlin
Younis MI, Alsaleem F (2009) Exploration of new concepts for mass detection in electrostatically-actuated structures based on nonlinear phenomena. J Comput Nonlinear Dyn 4(2):021010
Younis MI, Abdel-Rahman EM, Nayfeh A (2003) A reduced-order model for electrically actuated microbeam-based mems. J Microelectromech Syst 12(5):672–680
Zhang W, Turner KL (2005) Application of parametric resonance amplification in a single-crystal silicon micro-oscillator based mass sensor. Sens Actuators, A 122(1):23–30
Acknowledgements
The authors are grateful to the reviewers for their insightful comments.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The following analytical modal analysis is given for the linear transverse vibrations of an undamped Euler–Bernoulli beam with clamped–free boundary conditions and a tip mass rigidly attached at the free end.
1.1 Boundary value problem
The governing equation of motion for undamped free vibrations of a uniform Euler–Bernoulli beam can be obtained as (Meirovitch 2010)
The clamped–free boundary conditions with a tip mass attachment can be expressed as
Equations A.1–A.2 define the boundary-value problem for the transverse vibrations of a cantilevered uniform Euler–Bernoulli beam with a tip mass attachment.
1.2 Solution using the method of separation of variables
The method of separation of variables (Greenberg 1998) can be used to solve Eq. A.1 by separating the spatial and temporal functions as
substitution of Eq. A.3 into Eq. A.1, yields
The left side of the Eq. A.4 relies on \(\hat{x}\) alone, while the right side is based on \(\hat{t}\) alone. Since \(\hat{x}\) and \(\hat{t}\) are independent variables, the traditional reason for the separation of variables states that both sides of the Eq. A.4 must be equal to the same constant:
yielding
The positive constant \(\gamma \) can be represented as the square of another constant: \(\gamma =\omega ^2\). The solution forms of Eqs. A.6, and A.7 are then
where A, B, C, D, E, and F are unknown constants and
Equation A.3 can be employed in Eq. A.2 to obtain following boundary conditions
The spatial form of boundary conditions, Eqs. A.11 and A.12, should then be employed to find the values of \(\lambda \) which give the non-trivial \({\phi _i}(\hat{x})\). This process is referred to as the differential eigenvalue problem and is next covered.
1.3 Differential Eigenvalue problem
Substituting Eq. A.8 in Eq. A.11 yields
Equation A.8 then becomes
Hence the unknown constants are A and C only. Using Eq. A.15 in the remaining two boundary conditions given by Eq. A.12 gives
The coefficient matrix in Eq. A.16 has to be singular in order to obtain non-trivial values of A and C (hence non-trivial \({\phi _i}(\hat{x})\)). Setting the determinant of the above coefficient matrix gives the characteristic equation of the differential eigenvalue problem as
For the given system parameters \(\hat{\rho }\), \(\hat{b}\), \(\hat{h}\), \(\hat{L}\), and \(\hat{M}_a\), one can solve for the roots of Eq. A.17, which are the eigenvalues of the system. The eigenvalue of the \(i^th\) vibration mode is denoted here as \(\lambda _i\), and it is associated with the \(i^th\) eigenfunction denoted by \({\phi _i}(\hat{x}) \) is obtained using second row of Eq. A.16 in Eq. A.15 to keep only a single modal constant
Using Eq. into Eq. A.18, the nondimensional form of Eq. A.18 is obtained as
On defining a new constant \(\beta _i\) as
Eq. A.20 is written as
Rights and permissions
About this article

Cite this article
Godara, R.K., Sharma, A.K., Joshi, N. et al. A novel capacitive mass sensor using an open-loop controlled microcantilever. Microsyst Technol 26, 2977–2987 (2020). https://doi.org/10.1007/s00542-020-04850-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-020-04850-5