
Abstract
We study the approximation of finite-dimensional rate-independent quasistatic systems, via a vanishing-inertia asymptotic analysis of dynamic evolutions. We prove the uniform convergence of dynamic solutions to a rate-independent one, employing the variational concept of energetic solution. Motivated by applications in soft locomotion, we allow time-dependence of the dissipation potential, and translation invariance of the potential energy.



Similar content being viewed by others


Notes
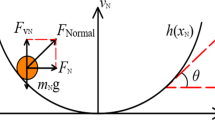
Sometimes Froude’s number for crawlers is defined as
$$\begin{aligned} \text {Froude's number}:=\frac{\text {inertial forces}}{\text {gravitational forces}}=\frac{v_\mathrm {char}^2}{gL_\mathrm {char}}\quad \left( =\mu _\mathrm {char}\, \frac{m_\mathrm {char}\, L_\mathrm {char}}{T_\mathrm {char}^2\, F_\mathrm {char}} \right) , \end{aligned}$$which is the same expression used in legged locomotion. The validity of this second definition is based on the assumption that the normal load proportional to dry friction forces is caused by gravity, so that \(F_\mathrm {char}= m_\mathrm {char}g\mu _\mathrm {char}\). The two notions are thus related by setting the characteristic speed as \(v_\mathrm {char}=L_\mathrm {char}/T_\mathrm {char}\). We prefer definition (1.4) for two reasons. Firstly, it provides a direct measure of the relevance of inertia in the gait, without the need to compare it with the characteristic friction coefficient \(\mu _\mathrm {char}\). Secondly, not necessarily the normal load is produced by gravity: consider for instance a crawler underground or in a pipe.
References
Accoto, D., Castrataro, P., Dario, P.: Biomechanical analysis of oligochaeta crawling. J. Theor. Biol. 230, 49–55 (2004)
Adly, S., Le, B.K.: Unbounded second-order state-dependent Moreau’s sweeping processes in Hilbert spaces. J. Optim. Theory Appl. 169, 407–423 (2016)
Agostiniani, V.: Second order approximations of quasistatic evolution problems in finite dimension. Disc. Contin. Dyn. Syst. 32, 1125–1167 (2012)
Agostiniani, V., Rossi, R.: Singular vanishing-viscosity limits of gradient flows: the finite-dimensional case. J. Differ. Equ. 263, 7815–7855 (2017)
Alexander, R.M.: Principles of Animal Locomotion. Princeton University Press (2003)
Ambrosio, L., Gigli, N., Savaré, G.: Gradient Flows in Metric Spaces and in the Space of Probability Measures. Birkhäuser Verlag, Basel-Boston-Berlin (2005)
Arroud, ChE, Colombo, G.: A maximum principle for the controlled sweeping process. Set-Valued Var. Anal. 26, 607–629 (2018)
Artina, M., Cagnetti, F., Fornasier, M., Solombrino, F.: Linearly constrained evolutions of critical points and an application to cohesive fractures. Math. Models Methods Appl. Sci. 27, 231–290 (2017)
Aubin, J.P., Cellina, A.: Differential Inclusions: Set-Valued Maps and Viability Theory. Springer (2012)
Bastien, J., Bernardin, F., Lamarque, C.-H.: Non Smooth Deterministic or Stochastic Discrete Dynamical Systems: Applications to Models with Friction or Impact. Wiley (2013)
Bastien, J., Schatzman, M., Lamarque, C.-H.: Study of some rheological models with a finite number of degrees of freedom. Eur. J. Mech. A Solids 19, 277–307 (2000)
Behn, C., Schale, F., Zeidis, I., Zimmermann, K., Bolotnik, N.: Dynamics and motion control of a chain of particles on a rough surface. Mech. Syst. Sig. Process. 89, 3–13 (2017)
Berthé, R.A., Westhoff, G., Bleckmann, H., Gorb, S.N.: Surface structure and frictional properties of the skin of the Amazon tree boa Corallus hortulanus (Squamata, Boidae). J. Comp. Physiol. A 195, 311–318 (2009)
Brezis, H.: Operateurs Maximaux Monotones et Semi-groupes de Contractions dans les Espaces de Hilbert, North–Holland Publishing Company Amsterdam (1973)
Brogliato, B., Tanwani, A.: Dynamical systems coupled with monotone set-valued operators: formalisms, applications, well-posedness, and stability. SIAM Rev. 62, 3–129 (2020)
Brokate, M., Krejčí, P.: Optimal control of ODE systems involving a rate independent variational inequality. Disc. Cont. Dyn. Syst. Ser. B 18, 331–348 (2013)
Calisti, M., Picardi, G., Laschi, C.: Fundamentals of soft robot locomotion. J. Roy. Soc. Interf. 14, 20170101 (2017)
Cicconofri, G., DeSimone, A.: A study of snake-like locomotion through the analysis of a flexible robot model. Proc. Roy. Soc. A Math. Phys. Eng. Sci. 471, 20150054 (2015)
Colombo, G., Gidoni, P.: On the optimal control of rate-independent soft crawlers. J. Mathématiques Pures et Appliquées 146, 127–157 (2021)
Colombo, G., Gidoni, P., Vilches, E.: Stabilization of periodic sweeping processes and asymptotic average velocity for soft locomotors with dry friction. Disc. Contin. Dyn. Syst. (in press)
Crismale, V.: Globally stable quasistatic evolution for a coupled elastoplastic-damage model. ESAIM Control Optim. Calc. Var. 22, 883–912 (2016)
Dal Maso, G., Scala, R.: Quasistatic evolution in perfect plasticity as limit of dynamic processes. J. Dyn. Differ. Equ. 26, 915–954 (2014)
DeSimone, A., Guarnieri, F., Noselli, G., Tatone, A.: Crawlers in viscous environments: linear vs non-linear rheology. Int. J. Non-Linear Mech. 56, 142–147 (2013)
Efendiev, M.A., Mielke, A.: On the rate-independent limit of systems with dry friction and small viscosity. J. Conv. Anal. 13, 151–167 (2006)
Francfort, G., Mielke, A.: Existence results for a class of rate-independent material models with nonconvex elastic energies. J. Reine Angew. Math. 595, 55–91 (2006)
Gamus, B., Salem, L., Gat, A.D., Or, Y.: Understanding inchworm crawling for soft-robotics. IEEE Robotics Autom. Lett. 5, 1397–1404 (2020)
Gidoni, P.: Rate-independent soft crawlers. Quart. J. Mech. Appl. Math. 71, 369–409 (2018)
Gidoni, P., DeSimone, A.: On the genesis of directional friction through bristle-like mediating elements. ESAIM Control Optim. Calc. Var. 23, 1023–1046 (2017)
Heida, M., Mielke, A.: Averaging of time-periodic dissipation potentials in rate-independent processes. Disc. Contin. Dyn. Syst. Ser. S 10(6), 1303–1327 (2017)
Hu, D.L., Nirody, J., Scott, T., Shelley, M.J.: The mechanics of slithering locomotion. Proc. Natl. Acad. Sci. USA 106, 10081–10085 (2009)
Jung, K., Koo, J.C., Nam, J., Lee, Y.K., Choi, H.R.: Artificial annelid robot driven by soft actuators. Bioinsp, Biomim. 2, S42–S49 (2007)
Kim, S., Laschi, C., Trimmer, B.: Soft robotics: a bioinspired evolution in robotics. Trends Biotechnol. 31, 287–294 (2013)
Krejcí, P.: Hysteresis, Convexity and Dissipation in Hyperbolic Equations. Gattötoscho (1996)
Krejcí, P., Monteiro, G.A.: What is the Best Viscous Approximation to a Rate-Independent Process? J. Convex Anal. 27, (2020)
Kunze, M., Monteiro Marques, M.D.P.: An introduction to Moreau’s sweeping process. Impacts Mech. Syst. 551, 1–60 (1999)
Lazzaroni, G., Nardini, L.: On the quasistatic limit of dynamic evolutions for a peeling test in dimension one. J. Nonlinear Sci. 28, 269–304 (2018)
Lazzaroni, G., Rossi, R., Thomas, M., Toader, R.: Rate-independent damage in thermoviscoelastic materials with inertia. J. Dynam. Differ. Equ. 30, 1311–1364 (2018)
Manoonpong, P., Petersen, D., Kovalev, A., Wörgötter, F., Gorb, S.N., Spinner, M., Heepe, L.: Enhanced locomotion efficiency of a bio-inspired walking robot using contact surfaces with frictional anisotropy. Sci. Rep. 6, 39455 (2016)
Manwell, T., Guo, B., Back, J., Liu, H.: Bioinspired setae for soft worm robot locomotion. In: 2018 IEEE International Conference on Soft Robotics (Robosoft), pp. 54–59 (2018)
Martins, J.A.C., Monteiro Marques, M.D.P., Petrov, A.: On the stability of quasi-static paths for finite dimensional elastic-plastic systems with hardening. ZAMM Z. Angew. Math. Mech. 87, 303–313 (2007)
Marvi, H., Bridges, J., Hu, D.L.: Snakes mimic earthworms: propulsion using rectilinear travelling waves. J. Roy. Soc. Interf. 10, 20130188 (2013)
Marvi, H., Meyers, G., Russell, G., Hu, D.L.: A snake-inspired robot with active control of friction. In: Proceedings of the ASME Dynamic Systems and Control Conference and BATH/ASME Symposium on Fluid Power and Motion Control, pp. 443–450 (2012)
Menciassi, A., Accoto, D., Gorini, S., Dario, P.: Development of a biomimetic miniature robotic crawler. Auton. Robots 21, 155–163 (2006)
Mielke, A.: Evolution of rate-independent systems, Evolutionary equations. In: Handbook of Differential Equations, vol. II, pp. 461–559. Elsevier/North-Holland, Amsterdam (2005)
Mielke, A.: Three examples concerning the interaction of dry friction and oscillations. In: Trends in Applications of Mathematics to Mechanics, pp. 159–177. Springer, Cham (2018)
Mielke, A., Petrov, A., Martins, J.A.C.: Convergence of solutions of kinetic variational inequalities in the rate-independent quasistatic limit. J. Math. Anal. Appl. 348, 1012–1020 (2008)
Mielke, A., Rossi, R., Savaré, G.: Modeling solutions with jumps for rate-independent systems on metric spaces. Disc. Cont. Dyn. Syst. 25, 585–615 (2009)
Mielke, A., Rossi, R., Savaré, G.: BV solutions and viscosity approximations of rate-independent systems. ESAIM Control Optim. Calc. Var. 18, 36–80 (2012)
Mielke, A., Rossi, R., Savaré, G.: Balanced viscosity (BV) solutions to infinite-dimensional rate-independent systems. J. Eur. Math. Soc. 18, 2107–2165 (2016)
Mielke, A., Roubíček, T.: Rate-Independent Systems: Theory and Application. Springer-Verlag, New York (2015)
Mielke, A., Theil, F.: On rate-independent hysteresis models. NoDEA Nonlinear Differ. Equ. Appl. 11, 151–189 (2004)
Mielke, A., Thomas, M.: Damage of nonlinearly elastic materials at small strain - Existence and regularity results -. Z. Angew. Math. Mech. 90, 88–112 (2010)
Moreau, J.J.: Bounded Variation in Time. Topics in nonsmooth mechanics, Birkhäuser, Basel (1988)
Nardini, L.: A note on the convergence of singularly perturbed second order potential-type equations. J. Dyn. Differ. Equ. 29, 783–797 (2017)
Negri, M.: Quasi-static rate-independent evolutions: characterization, existence, approximation and application to fracture mechanics. ESAIM Control Optim. Calc. Var. 20, 983–1008 (2014)
Quillin, K.: Kinematic scaling of locomotion by hydrostatic animals: ontogeny of peristaltic crawling by the earthworm lumbricus terrestris. J. Exp. Biol. 202, 661–674 (1999)
Rafsanjani, A., Zhang, Y., Liu, B., Rubinstein, S.M., Bertoldi, K.: Kirigami skins make a simple soft actuator crawl. Sci. Robotics 3, eaar7555 (2018)
Riva, F.: On the approximation of quasistatic evolutions for the debonding of a thin film via vanishing inertia and viscosity. J. Nonlinear Sci. 30, 903–951 (2020)
Rockafellar, R.T., Wets, R.J.-B.: Variational Analysis. Springer-Verlag, Berlin (1998)
Rossi, R.: From visco to perfect plasticity in thermoviscoelastic materials. ZAMM Z. Angew. Math. Mech. 98, 1123–1189 (2018)
Roubíček, T.: Adhesive contact of visco-elastic bodies and defect measures arising by vanishing viscosity. SIAM J. Math. Anal. 45, 101–126 (2013)
Roubíček, T.: Rate-independent processes in viscous solids at small strains. Math. Methods Appl. Sci. 32, 825–862 (2009)
Scala, R.: Limit of viscous dynamic processes in delamination as the viscosity and inertia vanish, ESAIM: Control Optim. Calc. Var. 23, 593–625 (2017)
Scilla, G., Solombrino, F.: A variational approach to the quasistatic limit of viscous dynamic evolutions in finite dimension. J. Differ. Equ. 267, 6216–6264 (2019)
Sellers, W.I., Manning, P.L.: Estimating dinosaur maximum running speeds using evolutionary robotics. Proc. Roy. Soc. B Biol. Sci. 274, 2711–2716 (2007)
Seok, S., Onal, C.D., Cho, K.J., Wood, R.J., Rus, D., Kim, S.: Meshworm: a peristaltic soft robot with antagonistic nickel titanium coil actuators. IEEE/ASME Trans. Mechatr. 18, 1485–1497 (2013)
Vaughan, C.L., O’Malley, M.J.: Froude and the contribution of naval architecture to our understanding of bipedal locomotion. Gait Post. 21, 350–362 (2005)
Vikas, V., Cohen, E., Grassi, R., Sözer, C., Trimmer, B.: Design and locomotion control of a soft robot using friction manipulation and motor-tendon actuation. IEEE Trans. Robot 32, 949–959 (2016)
Wagner, G.L., Lauga, E.: Crawling scallop: friction-based locomotion with one degree of freedom. J. Theor. Biol. 324, 42–51 (2013)
Acknowledgements
The authors are grateful to Professors Gianni Dal Maso and Giovanni Colombo for many helpful discussions on the topic. A special thank goes also to an anonymous Referee for the careful reading of the manuscript and for several valuable suggestions on the presentation of our results.
Part of the work was carried out while F. R. was a Ph.D. student in SISSA (International School for Advanced Studies, Via Bonomea, 265, 34136, Trieste, Italy).
P. G. was partially supported by the GAČR–FWF grant 19-29646L and the MŠMTČR grant 8J19AT013. F. R. is member of the Gruppo Nazionale per l’Analisi Matematica, la Probabilità e le loro Applicazioni (GNAMPA) of the Istituto Nazionale di Alta Matematica (INdAM).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by J. M. Ball.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gidoni, P., Riva, F. A vanishing-inertia analysis for finite-dimensional rate-independent systems with nonautonomous dissipation and an application to soft crawlers. Calc. Var. 60, 191 (2021). https://doi.org/10.1007/s00526-021-02067-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00526-021-02067-6