
Abstract
When real-world engineering challenges are examined adequately, it becomes clear that multi-objective need to be optimized. Many engineering problems have been handled utilizing the decomposition-based optimization approach according to the literature. The performance of multi-objective evolutionary algorithms is highly dependent on the balance of convergence and diversity. Diversity and convergence are not appropriately balanced in the decomposition technique, as they are in many approaches, for real-world problems. A novel Multi-Objective Artificial Algae Algorithm based on Decomposition (MOAAA/D) is proposed in the paper to solve multi-objective structural problems. MOAAA/D is the first multi-objective algorithm that uses the decomposition-based method with the artificial algae algorithm. MOAAA/D, which successfully draws a graph on 24 benchmark functions within the area of two common metrics, also produced promising results in the structural design problem to which it was applied. To facilitate the design of the "rectangular reinforced concrete column" using MOAAA/D, a solution space was derived by optimizing the rebar ratio and the concrete quantity to be employed.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Metaheuristic optimization approaches are a dynamic solution technique that can be used effectively in solving every engineering and scientific problem. Many real-world optimization problems necessitate making choices between two or more maximizing or minimizing objectives that are in direct conflict [1,2,3,4,5]. Most issues in modern society, however, are multi-objective rather than single-objective, and these objectives conflict with one another; these problems are referred to as Multi-Objective Optimization Problems (MOOPs).
Initially, single-objective algorithms like Particle Swarm Optimization (PSO) and Genetic Algorithm (GA) were directly employed to address MOOPs by incorporating artificial enhancements to the problems [6]. In subsequent years, multi-objective optimization algorithms were developed specifically for addressing MOOPs. Several well-known and effective techniques based on evolution algorithms have been proposed to solve MOOPs, such as Multi-Objective Genetic Algorithm (MOGA) [7], Multi-Objective Niched Pareto Genetic Algorithm (NPGA) [8], Non-dominated Sorting Genetic Algorithm (NSGA) [9], and Multi-Objective Particle Swarm Optimization (MOPSO) [10]. Due to their population-based search technique, these algorithms may get a collection of solutions in a single run and they have demonstrated improved performance in addressing MOOPs [11].
The first of three common methodologies used to solve MOOPs is the Pareto dominance-based strategy [1,2,3, 5, 12,13,14,15]. This sort of algorithm uses a Pareto dominance-based connection to approach the Pareto front in MOOPs, but its efficiency may degrades as the number of objectives increases. Other tactics, like elitism, niching, and archiving, are frequently utilized along with Pareto-based approaches to ensure population variety [11]. The second technique is to use an algorithm that is based on indicators, such as Indicator-Based Evolutionary Algorithm (IBEA) [16, 17]. Although researchers have presented a quick approach of computing hypervolumes, these methods often require an indication to direct the search process. It is quite time consuming when confronting the sort of huge objective issues. The third method is to use a decomposition-based algorithm, such as Multi-Objective Evolutionary Algorithm Based on Decomposition (MOEA/D) [18]. Many decomposition-based researches have been conducted since the original publication to develop the MOEA/D algorithm or to tackle real-world issues using this approach [19,20,21,22]. The following are the most notable works on decomposition-based algorithms from the past to the present [23,24,25,26,27,28]. Following the development and widespread adoption of these three techniques (Pareto-based, Decomposition-based, and Indicators-based), algorithms that were initially proposed to solve single-objective problems were integrated with these methods. Subsequently, these amalgamated approaches were reintroduced as novel multi-objective algorithms. Among these, some of the most widely recognized algorithms include MOPSO, Multi-Objective Artificial Bee Colony algorithm (MOABC), Multi-Objective Strength Pareto Evolutionary Algorithm 2 (SPEA2), and MOPSO based on Decomposition (MOPSO/D) [10, 29,30,31].
The Artificial Algae Algorithm (AAA) is an innovative and effective algorithm introduced by Uyumaz and colleagues in 2015, drawing inspiration from the helical movement pattern observed in algae [32]. Multi-Objective AAA (MOAAA) was reintroduced as a Pareto-based multi-objective algorithm by Babalik and Ozkis in 2018 [1]. The study demonstrated its competitiveness when compared to other some multi-objective algorithms variants.
Decomposition-based algorithms exhibit a fundamentally distinct structure in comparison to algorithms based on Pareto-based principles. Pareto-based algorithms employ a special methodology for ranking solutions and assessing them based on the Pareto dominance index. Decomposition-based algorithms address multi-objective problems by partitioning them into subproblems and subsequently optimizing these subproblems.
The benefits of decomposition-based algorithms can be outlined as follows:
-
Decomposition-based algorithms divides MOOPs into subproblems using the decomposition method and solves these subproblems simultaneously.
-
The decomposition structure does not treat MOOPs as an indivisible whole, allowing for a more detailed exploration of the problem space.
-
Due to their nature that treats objective as a single objective, decomposition-based algorithms are well-suited for addressing many-objective problems involving more than three objectives.
In the article, AAA, when introduced, was compared with Standard Particle Swarm Optimization (SPSO) [33], Artificial Bee Colony (ABC) [34], Bat Algorithm (BA) [35], and Differential Evolution (DE) [36] algorithms in various aspects and showed superior performance. However, despite these accomplishments, our literature review reveals that AAA has not yet been advocated as a decomposition-based multi-objective algorithm. Additionally, in accordance with the No Free Lunch (NFL) theorem [37], acknowledging that no algorithm can universally excel across all problems, there persists a continual need for innovative problem-solving approaches. Consequently, it is envisaged that by synergizing the advantages of decomposition-based strategies with those of the Multi-Objective Artificial Algae Algorithm (MOAAA/D), an enhanced balance between convergence and diversity can be achieved.
Optimization is a critical issue in all engineering disciplines. Although there is much research in the literature on the optimization of structural problems, the majority of these studies consider the topic as a single-objective optimization problem.
Some of the newly suggested techniques to structural optimization utilizing multi-objective optimization algorithms are as follows: Structural optimization problems were handled with NSGA-II and Generalized Differential Evolution (GDE3) algorithms and successful results were obtained [38]. Furthermore, after being evaluated on benchmarks, a gradient-based multi-objective optimization technique was created and suited to real-world issues [39]. In the following paper, a novel jellyfish-inspired algorithm for structural design challenges is suggested [40]. In another study, the MOEA/D method for bi-objective structural optimization issues was created and applied to tackle real-world situations [41]. In a new study proposed in 2023 by Altıok and colleagues, the Hot Mix Asphalt (HMA) problem has been addressed as a multi-objective optimization problem [6]. In 2017, Zao and his colleagues conducted an analysis of the design of cooling towers using multi-objective optimization algorithms [42]. Hughes and colleagues, on the other hand, implemented the structural design of a ship in ultimate limit state using the Vector Evaluated Genetic Algorithms (VEGA) algorithm in 2014 [43]. In a study conducted by Liao and colleagues in 2021, a framework has been introduced for optimizing battery thermal management systems. This framework successfully enhances designs by minimizing maximum temperature, temperature deviation, and energy consumption through the utilization of surrogate models and multi-objective optimization [44].
The minimization problem of the cost of rectangular reinforced concrete columns under uniaxial bending has previously been addressed as a single-objective optimization. The study, the quantities of steel and concrete to be used in cost optimization have been collectively considered as a whole [45]. In the scope of this study, concrete costs and steel costs have been considered individually; however, simultaneous optimization has been performed. This is because concrete and steel, with their distinct prices and structures, are more suitable to be treated as a multi-objective optimization problem. The column cost minimization problem, being treated as a multi-objective issue, ultimately results in a flexible solution space for the user. This problem is three-dimensional, and at first glance, it might seem that exact optimization methods for three-dimensional problems can be applied. However, the problem parameters are continuous. Since the problem parameters are continuous, there is an infinite possibility for the most accurate design. Additionally, by introducing other parameters to the problem, it can be further developed, making it impractical for complete resolution through precise optimization methods. Therefore, using metaheuristic optimization algorithms is more rational. According to the literature review conducted in this study, there are numerous works employing a multi-objective approach for cost minimization of concrete columns [46,47,48,49]. However, some of these studies did not address the problem with well-known multi-objective optimization algorithms; in other words, simultaneous optimization of objectives is not considered in these works. For these reasons, it is more beneficial to consider such problems as multi-objective metaheuristic optimization problems and to search for solutions in terms of contributing to the literature (Table 1).
The following are the primary contributions of this paper:
-
Within the scope of our literature research to the best of our knowledge, we proposed the first multi-objective optimization model that models the AAA with the decomposition-based method.
-
Considering the helical movement of algae in varying dimensions according to randomness instead of three dimensions as in the original AAA contributed to the diversity and swarm intelligence.
-
In order to balance convergence and diversity, a creative evolution technique is used to divide the search process into two stages, the first of which concentrates on convergence and the second on diversity.
-
Multi-objective cost minimization of reinforced concrete columns was made with the proposed algorithm.
-
The cost of reinforced concrete columns is composed of steel and concrete materials. In this study, cost optimization is concurrently achieved for two objectives: steel cost and concrete cost.
1.1 Motivation
Here are the main reasons that inspired us to carry on this study.
-
Decomposition-based algorithms are wished to be overcome challenges in their variety, while they have perfect convergence.
-
The crossover operator was criticized for updating only in three dimensions for each problem, regardless of the problem dimensions used in single-objective AAA and MOAAA, and it was argued that the variation of the crossover ratio according to the number of function evaluations is more important in terms of population diversity.
-
The idea was advocated that performing the helical movement as a colony rather than an algae cell is more in line with the concept of herd intelligence.
-
It is believed that, like with any engineering problem, multi-objective optimization techniques are more effective in solving structural optimization problems than single-objective optimization approaches.
-
Cost separation into steel and concrete components, and simultaneous minimization optimization, is believed to balance the cost without compromising the structural integrity of the building.
2 Research background
2.1 Multi-objective optimization problems
At least two objectives and certain restriction functions are required in a multi-objective optimization problem. Its goal is to identify mutually accepted solutions in a solution space that fulfill objectives and constraints functions. A multi-objective optimization problem is theoretically defined as follows [Eq. 1–2]:
where Ω denotes the decision space. \(x=\left({x}_{1},{x}_{2},\dots ,{x}_{n}\right)\) denotes a candidate solution with n variables, where m is the number of objective functions (as different to a single-objective function). There may be several potential answers to an issue in MOOPs and comparing these solutions to one another is critical. The notion of Pareto dominance may be used to compare two alternatives [1, 50]. The decomposition method is another extensively utilized strategy [18].
2.2 AAA
The artificial algae algorithm [32] devised by Uymaz et al. was inspired by the motile microalgae's distinctive and live activity. The AAA is made up of three main processes: helical movement, evolutionary evolution, and adaptability. The helical movement of the algae in the fluid is their attempt to come closer to the light. Algae reproduce through mitosis during the evolutionary process, while they adapt to their surroundings during the adaptation phase. The major species in this algorithm is algae, and the entire population is made out of algal colonies [1].
2.2.1 AAA based strategies
We'll utilize the following algal parameters and fundamental methods in our suggested algorithm:
Algae Size, an algae size is calculated according to the fitness value of each alga in the population. Energies of the algae are calculated using the algae sizes. Friction Surface, the energies of the algae are also calculated and their surface areas are found [32]. Cutting force is a fixed value used in crossover, and the energy loss is the energy consumed by the algae in each cycle.
At the initiation stage of the algorithmic steps, problem parameters are defined, encompassing dimension D and lower and upper bounds (LB and UB) for each dimension (Eq. 3). Subsequently, algorithm-specific parameters such as cutting force, energy loss, adaptation, the number of algorithms in the population, and the termination criterion are determined. In the following stage, algorithm colonies are initialized with random solutions, and the size of each algorithm colony is set to 1, along with a hunger value of 0. In the concluding phase of the preparation step, the fitness function of each algorithm colony is computed [32].
The second step is the main part and this part continues until the stopping criterion is met. In the first stage, respectively, the growth rates of the algae colonies (Eq. 4), their new sizes (G) (Eq. 5), friction surfaces (\(\tau\)) and, finally, the energies of the algae are calculated by normalizing the size of the algae colonies [32].
The equations expressing the growth rate and size of the algae colony have been calculated based on the Monod model. In the Monod model, µ represents the specific growth rate of the artificial algae colony, and \({\mu }_{{\text{max}}}\) is the maximum specific growth rate. Moving from the Monod equation, the size of the i. algae colony at time t + 1 is expressed in Eq. 4 and Eq. 5. As observed in the 5th line of the algorithm, the following operations are repeated until the energy of algorithm colonies becomes zero, that is, until the energy is exhausted. Different algae colonies are selected based on the tournament selection method according to the objective function value. Three algae cells (k, l, m) are selected for helical motion. The movement of the algae colony is calculated based on the equations in lines 8–10. The energy loss resulting from the movement of the algae colony and the calculation of the new solution (quality of the light source at the new coordinates) after the movement are determined (lines 12 and 13). If the new solution is better, the colony advances to the new position; otherwise, it remains in its current position, incurring energy loss due to metabolism (lines 14 and 15). If the energy of the algae colony is depleted, it proceeds to the next step; otherwise, it returns to the 6th line. If the algae colony does not find a better solution, the hunger level increases [32].
After these steps, the evolutionary process begins. The largest and smallest algae colonies are selected. A random cell (m) is chosen from the algae colony. The cell m is copied from the largest algae colony to the smallest algae colony, meaning the cell of the largest algae colony with a randomly determined size (r) is copied to the cell of the smallest algae colony (line 20). The hungriest algae colony is selected, and the chosen colony undergoes adaptation.
In the final step, the best solution is output.
2.3 MOAAA
In the evolutionary optimization area, NSGA-II [12] is a well-known multi-objective method that is used to tackle multi-objective optimization problems in several academic fields [51,52,53]. The single-objective Genetic Algorithm is transformed in NSGA-II using two essential strategies: fast non-dominated sorting and crowding distance calculation single bond. Many recent studies, such as [5, 14, 15, 54, 55], have effectively leveraged these methods to get outcomes. Crowding distance and fast non-dominated sorting methods, which are still studied today, were used in MOAAA. Another significant part of this work is that it is the first study to convert the AAA to a multi-objective algorithm, as far as we know [1].
The population of N agents in the algal colony is termed the primary population. N offspring agents are produced from the primary population utilizing parent agents obtained using a tournament selection procedure. The tournament is chosen based on the value of the quality ranking (QR) as described in section. The agents of main and offspring populations are mixed (2N) and the high-quality N agents are selected via using fast non-dominated sorting and crowding distance calculation strategies. These agents form the essential population of the next generation and these operations continue till the last generation. When the last generation is reached, the Pareto front (PF) is formed by the first front, which includes the non-dominated solutions. Modifications to the AAA are done in order to produce the MOAAA, and they are stated using the pseudo-code shown in Table 2 [1].
2.3.1 MOAAA and NSGA-II based strategies
Since we directly use some of the main strategies of MOAAA and NSGA-II in our work, we describe them superficially here. You can get thorough information about these techniques in [1, 12].
2.3.2 Fast non-dominated sorting
Using Pareto dominance principles, each solution is compared to the other members of the population. The first non-dominated front is made up of non-dominated solutions. The remaining population's non-dominated solutions are then chosen to determine the second front. Similarly, all remaining solutions are placed at the front based on their degree of non-dominance [1].
2.3.3 Crowding distance calculation
The density of the objective space for each solution in the population is referred to by this method. The closest neighborhood of the solution and extreme solutions in its rank are used to determine the crowding distance value. Because the population's extreme solutions must be protected, each objective function's extreme solutions are assigned to an unlimited distance value. A big distance number indicates that this area needs to be thoroughly examined, whereas a short distance value indicates that the area has been thoroughly searched [1].
2.3.4 Quality ranking (QR) value
The quality of a solution is determined by the greatness value of an algal colony. Since AAA is single objective, the greatness was calculated with the help of the fitness function. Because MOOPs have at least two objective functions, there is no scalar objective value to assess the solution's greatness. To tackle this issue, a quality rank (QR) value was proposed for each algal colony, based on fast non-dominated sorting and crowding distance techniques on both fronts. Solutions are ordered inversely according to their crowding distance values in the first front, and these QR values grow with each successive front. QR = 1 for extreme solutions with infinitive crowding distance values in the first front, and incremental QR values for the other solutions. As seen in Fig. 1 as the front number gets larger and the crowding distance gets smaller, one more value is added to the QR value. Thus, the quality is ranked from good to bad [1].

Representative graph of the calculation of the qualities of algae [1]
2.4 Decomposition methods
Multi-objective evolutionary algorithm based on decomposition has been shown to be successful in addressing issues with two and three objectives [56]. It breaks down a multi-objective optimization issue into a series of scalar optimization subproblems and solves them all at once. MOEA/D has reduced computational complexity at each generation than Pareto-based techniques since each subproblem is optimized using just knowledge from its many nearby subproblems [18]. Weighted sum technique, Tchebycheff approach, and boundary intersection method are three aggregation procedures commonly used to reduce MOOPs into a series of single-objective problems [18]. Because of its capacity to handle non-convex problems, the Tchebycheff technique is employed in this study to convert MOOPs into single optimization problems. The mathematical equation of the relevant strategy is given in Eq. 6.
where is x is the decision space, z refers to the reference point, f(x) to the fitness value, and λ to the weight value.
3 The proposed MOAAA/D algorithm
3.1 The framework of MOAAA/D
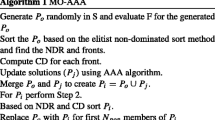
The suggested approach is a hybrid algorithm that combines the MOEA/D framework for fast convergence with the MOAAA for diversity. The algorithm is divided into two stages, one major and one little. While the big step accounts for almost 90% of the maximum function evolutions (maxFE) of the algorithm, its main task is to accelerate the convergence. In the small step, it focuses on the diversity and distribution of solutions.
Several parameters, such as population size, number of maximum evaluations, weight vector (λ), ideal point (z), cutting force (k), and energy loss (e), should be defined during the initialization of MOAAA/D. The initial population in the decision space is produced at random, and the weight vectors are formed via adaptive weight generation. Neighborhood structure is not suitable for the AAA system so the neighborhood structure of the MOEA/D framework is not used in MOAAA/D. The crucial part in this article is the crossover strategy we developed inspired by AAA. Thus, after converging very quickly and sufficiently, we performed more detailed final searches in the search space with MOAAA. Finally, a balance of diversity and convergence was established with a hybrid structure in this way. The 5th step in Table 3 is very important for the algorithm. Because, instead of using all the algae in the algae population in the crossover, the parent algae that are not good at the crossover result are expelled from the population and the parent selection is made only from the quality algae in the population. The second energy loss is a standard energy loss for all algae in the population. In the 14th row of the table, the update of the population is arranged according to the following mathematical equation. Figure 2 gives the flow diagram of the proposed algorithm.

Flowchart for the proposed MOAAA/D algorithm
The indices of the T nearest vectors of λi are kept in B(i). The Euclidean distance is used to determine how near two weight vectors are. As a result, λi's nearest vector is itself and then \(i\in B\left(i\right).\) If \(j\in B\left(i\right)\), The \(j\) th subproblem is a regarded as a neighbor of the \(i\) th subproblem. If \(F{(y}{\prime})\) is a better solution than \({FV}^{j}\), update all neighbors (we considered the whole population as neighbors) [18].
3.2 Computational complexity of MOAAA/D
This section examines the computational complexity of MOAAA/D. The algorithm consists of two main sections. The first section utilizes the MOEA/D framework, and according to the literature (from the existing research papers), the computational complexity of MOEA/D is O(mN2) [11]. In this context, N represents the number of solutions, and m denotes the number of objectives. In the second part of the proposed algorithm, a balance between diversity and convergence is achieved with MOAAA. MOAAA is a Pareto-based algorithm, and according to the literature review, the complexity of Pareto-based algorithms is O(mN2) [6, 12].
The constituents of MOAAA/D and their associated complexities are outlined below:
-
1.
The estimation of the magnitude of algae O(N).
-
2.
The computational complexity of energy calculation for each algae colony O(N2).
-
3.
The computational complexity of surface area calculation for algae colonies O(N).
-
4.
The computational complexity of the MOEA/D algorithm O(mN2).
-
5.
The computational complexity of the MOAAA algorithm O(mN2).
Overall, the computational complexity of MOAAA/D is O(N) + O(N2) + O(N) + O(mN2) + O(mN2), and as a result, it is O(mN2).
3.3 Proposed MOAAA/D crossover
We were inspired by the AAA crossover operator in offspring production. AAA and MOAAA use a crossover that updates in three dimensions regardless of the magnitude of the problem, and this process was inspired by the helical movement of algae.
The fundamental characteristics of AAA algae are modeled based on their helical movements in liquid, behaviors related to proximity to light, reproduction through mitotic division, and adaptation to their environment. Artificial algae, like a real-life alga, move toward a light source to perform photosynthesis, and its movement is in the form of helical swimming (Fig. 3).

Algal cells and colonies typically float and strive to remain near the water surface because there is sufficient light available for their survival in that region. They swim helically in the liquid using their flagella. The forward movement of a swimming algal cell is hindered by two factors. These factors are gravity and the viscous friction that occurs at the interface with the water surrounding the moving organism cell [32].
Here \({x}_{im}^{t}\), \({x}_{ik}^{t}, {x}_{il}^{t}\), i. are three randomly selected algae cells/colony of the algae colony at time t; \({x}_{jm}^{t}\), \({x}_{jk, }^{t}\) \({x}_{jl}^{t}\) are algal cells of selected sizes from a different algae colony in the population determined as the light source; \(\alpha ,\beta \in \left[\mathrm{0,2}\pi \right];H\in \left[-\mathrm{1,1}\right];\Delta\), cutting force coefficient; \({\tau }_{i}\), i. is the friction surface area of the algae colony at time t [32].
Three random dimensions are determined for the helical movement of the algal colony. One of these dimensions enables linear motion (Eq. 8), while the other two dimensions facilitate angular movement (Eq. 9 and Eq. 10). Equation 8 is used for one-dimensional problems, providing linear movement for the algal cell/colony. In cases where the problem has three or more dimensions, the movement of the algal colony becomes helical, and Eqs. 8–10 are employed [32].
In AAA and MOAAA, the helical movement inspired by real algae and based on three dimensions is utilized for crossover in the relevant algorithms to generate new algae colonies. This process contributes to the development of the population. Despite being a relatively successful strategy, a three-dimensional crossover alone proves inadequate for large-scale problems. This situation has been criticized in this article, and randomness has been introduced to the three-dimensional movement in each algae cell. This ensures that the entire algae population undergoes three-dimensional movement multiple times. In other words, to provide an alternative explanation, instead of each algae cell undergoing three-dimensional crossover, a one-dimensional movement will be performed. The algae cells to be crossed later will complete the algae's helical movement as a population through different movements. This way, the helical movement will transition from individual behavior to a population-wide pattern, liberating it from individuality.
In conclusion, faster convergence and greater diversity will be achieved for the population.
As seen in Table 4, in this study, a dynamic CR model developed by Altıok et al. in 2023 was used [6]. Accordingly, while a high rate of crossover was applied at the beginning of the problem-solving process, we reduced the crossover rate toward the end of the process.
In a concise summary, the initial AAA crossover model used to update in three dimensions without considering the problem size. However, with the introduction of the dynamic CR model, the number of helical movements, or in other words, the dimensions updated, underwent dynamic changes.
The individual helical motion of AAA is represented on the left of Fig. 4 and on the right is the representation of the helical movement of algae as colonies rather than individually as suggested in this article.

Representation, helical movement of individual algae and helical movement of algae as colonies
4 Experiment study
In this section, various experiments are carried out to demonstrate the performance of MOAAA/D. The proposed algorithm was compared with NSGA-II [12], which is one of the classical algorithms, MOEA/D [18], which is the basis of decomposition-based algorithms, MOAAA [1], which is the first multi-objective version of the AAA algorithm, and MOEA/D-Two Stages (MOEA/D-TS) [11], which is a good MOEA/D version that has been proposed recently, on various benchmarks. The performance measurements and few test instances are introduced first. Secondly, the comparison with other algorithms was conducted and the discussions on their performance are given. In the next section, the proposed algorithm, which proved its performance, solved the real-world problem.
4.1 Benchmark problems
The performance of MOAAA/D is evaluated in this work using nineteen unconstrained test examples. The test instances are divided into three categories: Zitzler Deb Thiele (ZDT) [58], Deb, Thiele, Laumanns ve Zitzler (DTLZ) [59], and Walking Fish Group (WFG) [60] problem families. In addition, five independent benchmark problems: Fonseca [61], Kursawe [62], Schaffer [63], Viennet2, and Viennet3 [64] problems are used as comparison problems. The benchmark suite is chosen from problems with various features in order to study the performance of the algorithms from several perspectives. DV and OBJ are "decision variables" and "objective functions," respectively, in Table 5.
4.2 The performance metrics
P* is an array of objective function vectors dispersed evenly over the objective space's true Pareto front (PFt), and A is an array of objective function vectors that anticipates the PFt. The performance measures (indicators) outlined below are used to determine the success of the solutions that belong to A.
4.2.1 Hypervolume (HV) metric
The volume of the objective space covered by solutions from set A is calculated using the HV metric. The mathematical model of the HV metric is as follows.
HV informs us about the A array's convergence and diversity accomplishments, with a large HV value indicating that the algorithm is performing well [1, 2, 5].
4.2.2 Inverted generational distance (IGD) metric
The average from P* to A is calculated using IGD.
The minimal Euclidean distance between the sets A and v is d(v,A). The metric value decreasing shows that the array A is getting closer to the P. Convergence and diversity IGD may be used to assess array A's performance [1, 2].
4.3 Experimental setting
On the performance of HV and IGD metrics, MOAAA/D was compared to several multi-objective algorithms such as NSGA-II, MOAAA, MOEA/D, and MOEA/D-TS. The comparison algorithms were conducted in the tests using jMetal 4.5 [65], a software package designed for multi-objective optimization. The MOAAA/D developed within the scope of this study is coded to integrate with jMetal 4.5 The population size for the proposed algorithm and the compared algorithms is set to 300 and the maximum function evaluation number (maxFE) to 30,000 (others are Table 6). Cutting force (\(\Delta\)) and energy loss (e) are set to 2 and 0.3 in MOAAA, respectively [1]. These parameters were used as originally proposed in the MOAAA/D.
All of the experiments in this study were carried out on a PC running Windows 7 64 bit, with an Intel(R) Core(TM) i7-3630QM CPU running at 2.40 GHz and 12 GB of RAM.
4.4 Experimental results
For each problem, all of the algorithms were run 100 times, and the HV and IGD results are shown in Tables 7 and 8. Performance results of successful algorithms are indicated in bold. Very important reminder: For a higher-quality Pareto front, the HV measure must be bigger, while the IGD metric must be smaller.
When the data generated according to the HV metric in Table 7 are examined, it will be seen that the proposed algorithm is extremely competitive. When the average of 100 independent run is taken, it will be clear that the MOAAA/D is successful in 14 of the 24 functions. Normally, the second algorithm is the MOEA/D-TS algorithm, which is newer than the other algorithms. As a result, almost all functions in the table (except DTLZ-3) showed remarkable performance. IGD is the second most common metric used in articles after HV. According to Table 8, while the most successful algorithm is the proposed algorithm with 9 out of 24 in the successful ranking, the second place is MOEA/D-TS with 6 out of 24.
The calculated values are summarized in Table 9. According to this table, the numbers of the best results produced by the algorithms according to the HV and IGD metric are given.
The Wilcoxon rank sum test [66] is a two-sample dependent test. It is a nonparametric alternative to the paired T test. In summary, Wilcoxon's rank sum test, a statistical test for nonparametric independent samples, is used at the 5% significance level to determine if the MOAAA/D findings are statistically significant different from the final results of the other algorithms. Tables 10, 11 show the p-values obtained from the rank sum test applied to all competitors' measurements. If the p-value is less than 0.05 (that is, less than 5%) it is marked with a " + ", which means that the proposed algorithm found a significant result compared to the compared algorithm. This condition is a strong proof that the MOAAA/D results are statistically significant and not merely coincidental.
According to Wilcoxon's rank sum within the scope of HV, the proposed algorithm produced significant results in all functions except for four when compared to MOEA/D-TS and MOAAA. Similarly, MOAAA/D produced significant non-random results compared to NSGA-II except for only two functions. It is successful in all functions when compared to MOEA/D. The situation is similar in Wilcoxon's rank sum within the scope of IGD, that is, it has been observed that significant and non-random results are produced in most of the benchmark functions.
The data presented in Table 12 clearly illustrate that the proposed MOAAA/D algorithm consistently generates meaningful results rather than random ones. The total of positive and negative outcomes does not sum up to 24 across all 24 test functions, which is attributed to the fact that certain algorithms do not yield significant results in a few test functions. When examining the table, particular attention should be given to the number of " + " symbols, representing the count of functions where the MOAAA/D algorithm produces distinct and meaningful results compared to the algorithm it is being compared against.
Convergence plots enable the comparison between the actual shapes of test functions, i.e., real Pareto fronts (PFt) (indicated by turquoise color), and the shapes generated by algorithms. Pareto fronts, in a sense, create the initial impression about the convergence performances of algorithms. Thus, through these graphs, the behaviors of algorithms against test functions can be immediately observed at a glance.
As seen in Figs. 5, 6, 7 and 8, all algorithms, except for MOEA/D, have demonstrated good performance in ZDT functions. In the DTLZ1 problem, MOEA/D-TS has achieved the best convergence compared to other algorithms. In DTLZ1, MOEA/D exhibited the second-best performance; however, MOAAA/D and MOEA/D-TS have formed a close and relatively suboptimal shape, just as in the average and standard deviation results. NSGA-II, on the other hand, has shown almost negligible convergence. It is observed that convergence plots are consistent with the results in Tables 7 and 8, confirming and validating each other. In the DTLZ2, DTLZ4, and DTLZ5 problems, almost all algorithms have produced graphs close to the ideal. In DTLZ3, while MOEA/D-TS has generated an acceptable graph, other algorithms have failed to reach the correct graph. In DTLZ6, MOAAA, MOAAA/D, and MOEA/D have produced an ideal graph. In DTLZ7, NSGA-II, MOAAA, and MOAAA/D have approached the PFt. As observed in WFG2, collectively, the algorithms have produced successful and similar results in the WFG test function family. The situation is the same in the Kursawe and Fonseca functions, but none of the algorithms could approximate the ideal graph in the Schaffer function. In Viennet2 and Viennet3, except for MOEA/D, other algorithms have achieved acceptable PFt convergences.

The Pareto fronts produced by algorithms for the stated problems (I)

The Pareto fronts produced by algorithms for the stated problems (II)

The Pareto fronts produced by algorithms for the stated problems (III)

The Pareto fronts produced by algorithms for the stated problems (IV)
Table 13 represents acceptable results as 1 and unacceptable results as 0 based on the graphs presented in Figs. 5, 6, 7 and 8. Additionally, incorrect graphs generated by algorithms are indicated with bold values.
In Figs. 9, 10 and 11, box plot drawings were created after 100 runs for each metric determined from the acquired findings of the problems. Considering all these findings, it is understood that the MOAAA/D is much closer to the real values.

The box plots produced by algorithms for the stated problems (I)

The box plots produced by algorithms for the stated problems (II)

The box plots produced by algorithms for the stated problems (III)
As is known, a box plot is a statistical graph used for summarizing and visualizing the distribution of data. This graph presents the fundamental statistical characteristics of the dataset. The results with larger values in terms of the HV metric are considered more valuable, indicating that median values leaning towards the right in box plots are deemed more ideal. Therefore, in this section, concise insights will be provided regarding certain box plots that warrant discussion (Table 14).
In accordance with the results in the convergence plots of the ZDT problem family, it is evident that, except for MOEA/D, other algorithms exhibit closer and superior performance. In the DTLZ1 problem, due to the presence of many unstable or outlier values, it is evident that the majority of algorithms did not complete their search, or sufficient maxFE calculations were not made for this problem. In DTLZ3, it is also evident from the relevant box plot that, except for MOEA/D and MOEA/D-TS, other algorithms did not produce meaningful data for calculating the HV metric. In the WFG6 problem, it is observed that algorithms other than MOEA/D-TS produce more stable results. The majority of box plots showing a low number of outliers indicate that the algorithms produced stable values.
5 Cost minimization of rectangular reinforced concrete columns under uniaxial bending
The shape depicted in Fig. 12 exemplifies a typical form of a rectangular reinforced concrete column. Our aim: Theoretically, it is to find the lowest cost design of the column within the scope of the safety requirements of the relevant regulation. The cost of the column consists mainly of concrete and steel costs. For this reason, two objective functions were determined to calculate the steel cost and the concrete cost [45, 67].

In Eq. 13, b is section width, h is section height, \({A}_{s}\) is reinforcement section area, l is column length, \({C}_{c}\) is unit cost per cubic meter of concrete. The aim here is to calculate the cost of one cubic meter of concrete.
In Eq. 14, that is, in the second objective function, \({\gamma }_{s}\) is the unit volume weight of steel and \({C}_{s}\) is the unit cost of steel ton.
In these equations, unit cost, height and unit material volume weight are fixed. b, h and their dependent \({A}_{s}\) are variables.
Here \(\rho\) is the reinforcement ratio and a value defined for our problem is a variable.
Figure 13 shows the deformation in a column under the effect of axial load and bending moment (M = Ne), and the intra-sectional stresses and forces due to these deformations. The equivalent rectangular stress distribution has been taken as the basis for the stresses in the section under pressure. When the equilibrium equation is written for the forces given in the figure, the axial load and equilibrium bending moment capacity of the column becomes like Eqs. 16–17.

The values indicated by \({f}_{s}\) and \({f}_{s}^{\prime}\) in the equations are the stresses calculated depending on the \({\varepsilon }_{s}\) and \({\varepsilon }_{s}^{\prime}\) stresses in the reinforcements.
\({\beta }_{1}\) in Eq. 18 is a coefficient depending on the characteristic compressive strength of the concrete. The value of \({\beta }_{1}\) is used as 0.85 in this problem. Checks to be made for problem design are shown in Table 15 [68].
f1 is the weight of the concrete to be used, and f2 is the weight coefficient of the steel to be used. In other words, by adding unit costs to these values, the total costs for the column can be found. The reason for calculating the costs of steel and concrete separately here is that the desired results can be selected from the solution space. For example, if the concrete costs have increased, results with a low concrete coefficient can be used, or for the periods when the steel cost is very high, the result with the minimum iron coefficient can be selected [45].
The two materials to be optimized in the optimization problem made within the scope of this study; is the amount of concrete and steel. Concrete: What we call aggregate; it is a composite material consisting of sand, gravel, granular mineral material and cement and water that bonds them together, which hardens over time and gains strength. Ready-mixed concretes are classified according to their quality from C25 to C50. C35 concrete class is one of the most durable concretes used today. The price of 1 cubic meter of C35 class concrete is 1450 Turkish liras (73 USD) today [69].
For the price of rebar, two websites, one known throughout the world and the other known in Turkey, were examined. Among them, the world-renowned website is S&P Global. Accordingly, the price of rebar is $640-$650/mt [70]. The rebar prices that a normal contractor can buy from Turkey were obtained from the address “demirfiyatlari.com”. Accordingly, rebar prices are approximately $810/mt [71].
The second amount of material to be optimized is the rebar used in the column. The price of one ton of steel is approximately 16,000 Turkish liras (810 US dollars).
According to Table 16, if we take the amount of Concrete as the priority, the minimum amount of material used will be 0.466, and the minimum value for the second purpose, namely the amount of steel used, will be 0.113 (lines 2–4). In future, if steel costs increase much more, then from the solution space, the row that uses the least amount of steel (lines 1 and 3) is selected, which will reduce the cost the total cost. According to the current steel and concrete prices, the least RC cost found by the algorithm is the values in line 29.
6 Conclusions
In this article, a two-stage algorithm (MOAAA/D) is proposed for structural design problems and other real-world problems. The technique of the algorithm in MOAAA/D is divided into two phases. The first stage seeks to speed up the algorithm's convergence; it uses the framework of decomposition-based MOEA/D, which allows the solutions to approximate the genuine Pareto front. In the second stage, it provides a detailed local search by adding some diversity to the algae population, which is getting closer to the solution due to the first stage. It has proven its effectiveness with its MOAAA/D performance, based on the average of 100 independent runs on 24 benchmark functions. The advantage of the MOAAA/D algorithm is that it provides a good balance of convergence and diversity, while its disadvantage is that its structure is complex because it is hybrid in nature.
The results of MOAAA/D in the cost minimization problem for the reinforced concrete column, which is a real-world engineering problem, are promising. Because, MOAAA/D calculated both concrete and steel costs at the same time, minimizing them and obtaining a solution space that offers design freedom to those working in this field. Thus, with the solution space at hand, the user can choose a solution with a high concrete ratio when the steel cost increases, or he can choose a cost with a high steel ratio when the concrete cost increases.
In future studies, this problem can be solved with known important multi-objective algorithms and a Pareto front can be obtained with its average results, thus bringing a real engineering problem to the literature that can be used by many researchers.
Data availability
The datasets generated during or analyzed during the current study are available from the corresponding author on reasonable request.
References
Babalik A, Ozkis A, Uymaz SA, Kiran MS (2018) A multi-objective artificial algae algorithm. Appl Soft Comput 68:377–395
Özkış A, Babalık A (2017) A novel metaheuristic for multi-objective optimization problems: The multi-objective vortex search algorithm. Inf Sci 402:124–148
Chi Y, Liu J (2015) Learning of fuzzy cognitive maps with varying densities using a multiobjective evolutionary algorithm. IEEE Trans Fuzzy Syst 24(1):71–81
Fan Z, Fang Y, Li W, Cai X, Wei C, Goodman E (2019) MOEA/D with angle-based constrained dominance principle for constrained multi-objective optimization problems. Appl Soft Comput 74:621–633
İnik Ö, Altıok M, Ülker E, Koçer B (2021) MODE-CNN: A fast converging multi-objective optimization algorithm for CNN-based models. Appl Soft Comput 109:107582
Altiok M, Alakara EH, Gündüz M, Ağaoğlu MN (2023) A multi-objective genetic algorithm for the hot mix asphalt problem. Neural Comput Appl 35(11):8197–8225
Fonseca CM, Fleming PJ (1993) Genetic algorithms for multiobjective optimization: formulationdiscussion and generalization. Icga 93(July):416–423
Horn J, Nafpliotis N, Goldberg DE (1994) A niched Pareto genetic algorithm for multiobjective optimization, In: Proceedings of the first IEEE conference on evolutionary computation. IEEE world congress on computational intelligence, IEEE, pp. 82–87.
Srinivas N, Deb K (1994) Muiltiobjective optimization using nondominated sorting in genetic algorithms. Evol Comput 2(3):221–248
Coello CC, Lechuga MS, MOPSO: A proposal for multiple objective particle swarm optimization, In: Proceedings of the 2002 congress on evolutionary computation. CEC'02 (Cat. No. 02TH8600), vol. 2, pp. 1051–1056: IEEE.
Cao J, Zhang J, Zhao F, Chen Z (2021) A two-stage evolutionary strategy based MOEA/D to multi-objective problems. Expert Syst Appl 185:115654
Deb K, Pratap A, Agarwal S, Meyarivan T (2002) A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans Evol Comput 6(2):182–197
Chaudhari P, Thakur AK, Kumar R, Banerjee N, Kumar A (2022) Comparison of NSGA-III with NSGA-II for multi objective optimization of adiabatic styrene reactor, Materials Today: Proceedings 57:1509–1514
Wang X, Chen G, Xu S (2022) Bi-objective green supply chain network design under disruption risk through an extended NSGA-II algorithm. Cleaner Logistics and Supply Chain 3:100025
Karakoyun M, Ozkis A, Kodaz H (2020) A new algorithm based on gray wolf optimizer and shuffled frog leaping algorithm to solve the multi-objective optimization problems. Appl Soft Comput 96:106560
Phan DH, Suzuki J (2013) R2-IBEA: R2 indicator based evolutionary algorithm for multiobjective optimization, In: 2013 IEEE congress on evolutionary computation, pp. 1836–1845: IEEE.
Chabane B, Basseur M, Hao J-K (2017) R2-IBMOLS applied to a practical case of the multiobjective knapsack problem. Expert Syst Appl 71:457–468
Zhang Q, Li H (2007) MOEA/D: A multiobjective evolutionary algorithm based on decomposition. IEEE Trans Evol Comput 11(6):712–731
Wang W, Dai S, Zhao W, Wang C (2022) Multi-objective optimization of hexahedral pyramid crash box using MOEA/D-DAE algorithm. Appl Soft Comput 118:108481
Yang M, Gan Y, Gao L, Zhu X (2022) A structural optimization model of a biochemical detection micromixer based on RSM and MOEA/D. Chem Eng Process Process Intensif 173:108832
Jiao R, Zeng S, Li C, Ong Y-S (2021) Two-type weight adjustments in MOEA/D for highly constrained many-objective optimization. Inf Sci 578:592–614
Fan Q, Yan X (2018) Multi-objective modified differential evolution algorithm with archive-base mutation for solving multi-objective $$ p $$ p-xylene oxidation process. J Intell Manuf 29(1):35–49
Li H, Zhang Q (2008) Multiobjective optimization problems with complicated Pareto sets, MOEA/D and NSGA-II. IEEE Trans Evol Comput 13(2):284–302
Zhang Q, Liu W, Li H (2009) The performance of a new version of MOEA/D on CEC09 unconstrained MOP test instances, In: 2009 IEEE congress on evolutionary computation, pp. 203–208: IEEE.
Ke L, Zhang Q, Battiti R (2013) MOEA/D-ACO: A multiobjective evolutionary algorithm using decomposition and antcolony. IEEE Trans Cybern 43(6):1845–1859
Zhang Q, Liu W, Tsang E, Virginas B (2009) Expensive multiobjective optimization by MOEA/D with Gaussian process model. IEEE Trans Evol Comput 14(3):456–474
Li H, Deb K, Zhang Q, Suganthan PN, Chen L (2019) Comparison between MOEA/D and NSGA-III on a set of novel many and multi-objective benchmark problems with challenging difficulties. Swarm Evol Comput 46:104–117
Zhang Y, Wang G-G, Li K, Yeh W-C, Jian M, Dong J (2020) Enhancing MOEA/D with information feedback models for large-scale many-objective optimization. Inf Sci 522:1–16
Peng W, Zhang Q (2008) A decomposition-based multi-objective particle swarm optimization algorithm for continuous optimization problems, In: 2008 IEEE international conference on granular computing, pp. 534–537: IEEE.
Nasiraghdam H, Jadid S (2012) Optimal hybrid PV/WT/FC sizing and distribution system reconfiguration using multi-objective artificial bee colony (MOABC) algorithm. Sol Energy 86(10):3057–3071
Zitzler E, Laumanns M, Thiele L (2001) SPEA2: Improving the strength Pareto evolutionary algorithm. TIK Report 103
Uymaz SA, Tezel G, Yel E (2015) Artificial algae algorithm (AAA) for nonlinear global optimization. Appl Soft Comput 31:153–171
Clerc M (2011) Standard particle swarm optimisation from 2006 to 2011, Particle Swarm Central, 253
Karaboga D (2010) Artificial bee colony algorithm. Scholarpedia 5(3):6915
Yang X-S, He X (2013) Bat algorithm: literature review and applications. Int J Bio-inspired Comput 5(3):141–149
Storn R, Price K (1997) Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J Global Optim 11:341–359
Wolpert DH, Macready WG (1997) No free lunch theorems for optimization. IEEE Trans Evol Comput 1(1):67–82
Vargas DE, Lemonge AC, Barbosa HJ, Bernardino HS (2021) Solving multi-objective structural optimization problems using GDE3 and NSGA-II with reference points. Eng Struct 239:112187
Premkumar M, Jangir P, Sowmya R (2021) MOGBO: A new multiobjective gradient-based optimizer for real-world structural optimization problems. Knowl-Based Syst 218:106856
Chou J-S, Truong D-N (2020) Multiobjective optimization inspired by behavior of jellyfish for solving structural design problems. Chaos, Solitons Fractals 135:109738
Ho-Huu V, Hartjes S, Visser HG, Curran R (2018) An improved MOEA/D algorithm for bi-objective optimization problems with complex Pareto fronts and its application to structural optimization. Expert Syst Appl 92:430–446
Zhao L et al (2017) Multi-objective optimization analysis of structural design for large cooling towers. Heat Transfer Eng 38(11–12):1135–1145
Hughes O, Ma M, Paik JK (2014) Applications of vector evaluated genetic algorithms (VEGA) in ultimate limit state based ship structural design, In: International conference on offshore mechanics and arctic engineering, vol. 45493, p. V007T12A006: American Society of Mechanical Engineers.
Liao X et al (2021) A framework of optimal design of thermal management system for lithium-ion battery pack using multi-objectives optimization. J Electrochem Energy Conv Storage 18(2):021005
Bekdaş G, Nigdeli M, Yücel M, Kayabekir A (2021) Yapay Zeka Optimizasyon Algoritmaları ve Mühendislik Uygulamaları, Seçkin Yayıncılık, Ankara
Yücel M, Nigdeli SM, Bekdaş G (2022) Generation of sustainable models with multi-objective optimum design of reinforced concrete (RC) structures. Structures 40:223–236
Afshari H, Hare W, Tesfamariam S (2019) Constrained multi-objective optimization algorithms: Review and comparison with application in reinforced concrete structures. Appl Soft Comput 83:105631
Jelušič P, Žula T (2023) Sustainable design of circular reinforced concrete column sections via multi-objective optimization. Sustainability 15(15):11689
Martins AM, Simões LM, Negrão JH, Lopes AV (2020) Sensitivity analysis and optimum design of reinforced concrete frames according to Eurocode 2. Eng Optim 52(12):2011–2032
Pareto V (1964) Cours d'économie politique. Librairie Droz
Khettabi I, Benyoucef L, Amine Boutiche M (2022) Sustainable multi-objective process planning in reconfigurable manufacturing environment: adapted new dynamic NSGA-II vs New NSGA-III. Int J Prod Res 60(20):6329–6349
Zheng Z, Lin J, Hu Y, Zhou Q, Yi C (2022) Dynamic unbalance identification and quantitative diagnosis of cardan shaft in high-speed train based on improved TQWT-RBFNN-NSGA-II method. Eng Fail Anal 136:106226
Bao L, Zheng M, Zhou Q, Gao P, Xu Y, Jiang H (2022) Multi-objective optimization of partition temperature of steel sheet by NSGA-II using response surface methodology. Case Stud Therm Eng 31:101818
Tombak GI, Güzelhan ŞN, Afacan E, Dündar G (2022) Simulated annealing assisted NSGA-III-based multi-objective analog IC sizing tool. Integration
Xu J, Tang H, Wang X, Qin G, Jin X, Li D (2022) NSGA-II algorithm-based LQG controller design for nuclear reactor power control. Ann Nucl Energy 169:108931
Trivedi A, Srinivasan D, Sanyal K, Ghosh A (2016) A survey of multiobjective evolutionary algorithms based on decomposition. IEEE Trans Evol Comput 21(3):440–462
Canter-Lund H, Lund JW (1995) Freshwater algae: their microscopic world explored. Bristol: Biopress 582
Zitzler E, Deb K, Thiele L (2000) Comparison of multiobjective evolutionary algorithms: Empirical results. Evol Comput 8(2):173–195
Deb K, Thiele L, Laumanns M, Zitzler E (2005) Scalable test problems for evolutionary multiobjective optimization, In: Evolutionary Multiobjective Optimization: teoretical advances and applications. London Springer London, pp. 105–145
Huband S, Hingston P, Barone L, While L (2006) A review of multiobjective test problems and a scalable test problem toolkit. IEEE Trans Evol Comput 10(5):477–506
Fonseca CM, Fleming PJ (1998) Multiobjective optimization and multiple constraint handling with evolutionary algorithms. I. A unified formulation. IEEE Trans Syst Man Cybern-Part A Syst Humans 28(1):26–37
Kursawe F (1990) A variant of evolution strategies for vector optimization, In: International conference on parallel problem solving from nature, pp. 193–197: Springer.
Schaffer JD (1985) Multiple objective optimization with vector evaluated genetic algorithms, In: Proceedings of the first international conference on genetic algorithms and their applications, Lawrence Erlbaum Associates. Inc., Publishers.
Vlennet R, Fonteix C, Marc I (1996) Multicriteria optimization using a genetic algorithm for determining a Pareto set. Int J Syst Sci 27(2):255–260
Durillo JJ, Nebro AJ (2011) jMetal: A Java framework for multi-objective optimization. Adv Eng Softw 42(10):760–771
Biswas S, Das S, Suganthan PN, Coello CAC (2014) Evolutionary multiobjective optimization in dynamic environments: A set of novel benchmark functions, In: 2014 IEEE congress on evolutionary computation (CEC), pp. 3192–3199: IEEE.
Nigdeli SM, Bekdaş G, Yang X-S (2016) Application of the flower pollination algorithm in structural engineering, In: Metaheuristics and optimization in civil engineering. Springer, pp. 25–42.
Committee A (2008), Building code requirements for structural concrete (ACI 318–08) and commentary, American Concrete Institute.
Anonymous (2023, 5.18.2023) Karakod: The price of one cubic meter of concrete. Available: https://www.karekod.org/blog/hazir-beton-fiyatlari-2023/
Anonymous (2023, 5/18/2023) S&P Global: 1 ton steel price May, 2023 Available: https://www.spglobal.com/commodityinsights/en/our-methodology/price-assessments/metals/turkish-rebar-export-price-explained
Anonymous (2023, 5.18.2023) Demirfiyatlari.com:1 ton steel price May, 2023 Available:https://www.demirfiyatlari.com/
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Altiok, M., Gündüz, M. MOAAA/D: a decomposition-based novel algorithm and a structural design application. Neural Comput & Applic (2024). https://doi.org/10.1007/s00521-024-09746-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00521-024-09746-3