
Abstract
In this paper, the global projective synchronization for fractional-order memristor-based neural networks with multiple time delays is investigated via combining open loop control with the time-delayed feedback control. A comparison theorem for a class of fractional-order systems with multiple time delays is proposed. Based on the given comparison theorem and Lyapunov method, the synchronization conditions are derived under the framework of Filippov solution and differential inclusion theory. Several feedback control strategies are given to ensure the realization of complete synchronization, anti-synchronization and the stabilization for the fractional-order memristor-based neural networks with time delays. Finally, a numerical example is given to illustrate the effectiveness of the theoretical results.
Similar content being viewed by others

1 Introduction
Memristor (as a contraction of memory and resistor) was first proposed by Chua in 1971 [1]. He predicted that there should be a fourth circuit element which is called memristor apart from resistor, capacitor and inductor in physical circuit models. A research team at the Hewlett–Packard Laboratory announced that they had built a prototype of a solidstate and nanometer-size memristor, which was postulated in Nature [2]. Compared with resistor, memristor shares the same unit of measurement and many similar properties. There are some papers which prove that the memristor exhibits the feature of pinched hysteresis, the same as the neurons in the human brain [3]. Because of this feature, more and more researchers construct the memristor-based neural networks to emulate the human brain through replacing the resistor by the memristor and study the dynamics of memristor-based neural network for the purpose of achieving its successful applications in neural learning, pattern recognition, associative memories and so on. Moreover, as a special kind of neural networks, memristor-based neural networks have attracted many researchers’ interests [4,5,6,7,8,9,10]. In the view of the system theory, the memristor-based neural network is a kind of nonlinear system with state-dependent switching which may have undesirable dynamical behaviors such as transient chaos, oscillations and instabilities.
Since chaos synchronization was proposed in [11], synchronization has become a hot topic in the fields of neural networks and complex networks. So far, there are many sorts of synchronization, such as complete synchronization, anti-synchronization, generalized synchronization, projective synchronization, phase synchronization, lag synchronization and exponential synchronization [12], etc. Note that projective synchronization was first proposed by Mainieri and Rehacek in [13], where the drive and response systems could achieve synchronization up to a scaling factor. The proportional feature can be used to extend binary digital to M-ary digital communication for achieving fast communication [14]. Recently, various kinds of projective synchronization for fractional-order chaotic systems without time delay are studied, such as the hybrid projective synchronization [15, 16], generalized projective synchronization [17], function projective synchronization [18], lag projective synchronization [19] and modified projective synchronization [20, 21]. It is significant to study projective synchronization of neural networks, which can obtain faster communication with its proportional feature.
As a generalization of the ordinary differentiation and integration to arbitrary non-integer order, fractional calculus has a long history, but its application in physics and engineering is just a recent interest focus to many researchers. Fractional-order system can provide an excellent instrument for the description of memory and hereditary properties of various materials and processes. In recent years, the researchers find that the fractional calculus can be well used in the study of neural networks. The fractional-order differentiation provides neurons with a fundamental and general computational ability that contributes to efficient information processing, stimulus anticipation and frequency-independent phase shifts in oscillatory neuronal firings [22]. The common capacitance in the continuous-time integer-order neural network can be replaced by the fractance, giving birth to the so-called fractional-order neural network model [23]. A lot of results on fractional-order neural networks have been obtained [23,24,25,26,27,28,29,30,31,32]. The stability and multi-stability of fractional-order neural networks with ring or hub structures were investigated in [23, 24]. The \(\alpha\)-stability and \(\alpha\)-synchronization for fractional-order neural networks were investigated in [25]. Some sufficient conditions were established to ensure the existence and uniqueness of the nontrivial solution for the fractional-order neural networks in [26]. A sufficient condition was established for the uniform stability of fractional-order neural networks with time delay in [28]. The fractional-order neural networks of two and three neurons with time delay were discussed, and the stability conditions were derived in [29]. Some sufficient conditions for stability of the fractional-order neural networks with hub structure and time delays were obtained, and the stability conditions of two fractional-order neural networks with different ring structures and time delays were derived in [30]. The global stability analysis of fractional-order neural networks with time delay was investigated based on the comparison theorem for a class of fractional-order systems with time delay [31].
However, there are a few results on the projective synchronization of fractional-order memristor-based neural networks. The global projective synchronization of fractional-order neural networks was investigated via combining open loop control with adaptive control [33]. But the authors did not consider the memristor-based neural networks. The conditions on the global Mittag-Leffler stability were established by using Lyapunov method for fractional-order memristor-based neural networks without time delay [34]. The projective synchronization of fractional-order memristor-based neural networks was discussed in [35], and sufficient conditions were derived in the sense of Caputo fractional derivative and by combining a fractional-order differential inequality. Note that the results in [33,34,35] did not consider time delays. In practice, it is well-known that time delays are unavoidable because of finite switching speeds of the amplifiers, which can cause oscillations or instabilities in dynamic systems.
To the best of our knowledge, there are few results on the projective synchronization for fractional-order memristor-based neural networks with multiple time delays. Motivated by this, the global projective synchronization for fractional-order memristor-based neural networks with multiple time delays is concerned in this paper. The main contribution of this paper lies in the following aspects. First, a comparison theorem for a class of fractional-order systems with multiple time delays is proposed. Based on the given comparison theorem and Lyapunov method, the global asymptotical synchronization conditions are derived. Second, the different controller from some previous work is designed which mixes the feedback controller and the time-delayed feedback controller. Furthermore, several feedback control strategies are given to ensure the realization of complete synchronization, anti-synchronization and the stabilization for the fractional-order memristor-based neural networks with multiple time delays. Finally, a fractional-order memristor-based chaotic neural network is given to illustrate the effectiveness of the theoretical results.
The structure of this paper is outlined as follows. In Sect. 2, the model description and some preliminaries are presented. Then, some criteria for global asymptotical projective synchronization of fractional-order memristor-based neural networks with multiple time delays are obtained in Sect. 3. In Sect. 4, a numerical example is given to illustrate the effectiveness of the theoretical results. Some conclusions are included in Sect. 5.
2 Preliminaries and model description
2.1 Preliminaries
Some elementary notations are introduced for the Caputo fractional-order derivative and its properties. The main theoretical tools for the qualitative analysis of fractional-order dynamical systems are given in [36,37,38].
The Caputo fractional-order derivative is defined as
where n is a positive integer, \(n-1<{q}\le n\) and \({\varGamma }(\cdot )\) is Gamma function.
The Laplace transform of the Caputo fractional-order derivative is
If \(f^{(k)}(0)=0,k=0,1,2,\ldots , n-1\), then
Some properties of the Caputo fractional-order derivative [39] are obtained as follows
-
(a)
\(_{0}D_{t}^{q}c=0\), where c is any constant;
-
(b)
If \(x(t)\in C^{m}[0,T]\) for \(T > 0\) and \(m-1< q < m \in Z^{+}\), then \(_{0}D_{t}^{q}x(0)=0\);
-
(c)
If \(x(t)\in C^{1}[0,T]\) for some \(T > 0\), \(q_{1},q_{2}\in R^{+}\), \(q_{1}+q_{2}\le 1\), then \(_{0}D_{t}^{q_{1}}{}_{0}D_{t}^{q_{2}}x(t)= _{0}D_{t}^{q_{1}+q_{2}}x(t)\).
In this paper, Caputo fractional-order derivative will be adopted, and the Adams–Bashforth–Moulton predictor–corrector scheme for solving the fractional-order differential equations with time delay will be used [40].
Definition 1
[41]. Let \(E \subseteq R^{n}\), \(x\mapsto F(x)\) is called a set-valued map from \(E \hookrightarrow R^{n}\), if for each point x of a set \(E \subseteq R^{n}\), there corresponds a nonempty set \(F(x) \subseteq R^{n}\).
Definition 2
[41]. A set-valued map F with nonempty values is said to be upper semi-continuous at \(x_{0}\in E \subseteq R^{n}\), if for any open set N containing \(F(x_{0})\), there exists a neighborhood M of \(x_{0}\) such that \(F(M)\subseteq N\). F(x) is said to have a closed (convex, compact) image, if for each \(x\in E\), F(x) is closed (convex, compact).
Definition 3
[42]. For differential system \({\mathrm{d}}x/{\mathrm{d}t}=f(t,x)\), where f(t, x) is discontinuous in x. The set-valued map of f(t, x) is defined as:
where \(B(x,\delta )=\{y:\Vert y-x\Vert \le \delta \}\) is the ball of center x and radius \(\delta\); intersection is taken over all sets N of measure zero and over all \(\delta > 0\); and \(\mu (N)\) is the Lebesgue measure of set N. A Filippov solution of system \({\mathrm{d}}x/{\mathrm{d}}t=f(t,x)\) with initial condition \(x(0) = x_{0}\) is absolutely continuous on any subinterval \(t \in [t_{1}, t_{2}]\) of [0, T], which satisfies \(x(0)=x_{0}\), and the differential inclusion \({\mathrm{d}}x/{\mathrm{d}}t \in F (t, x)\) for a.a. \(t \in [0, T]\).
Some results on fractional-order systems are given in this section, which will be used in global asymptotic projective synchronization of fractional-order memristor-based neural networks with the multiple time delays. The stability analysis of linear fractional-order systems with time delays is discussed. And a comparison theorem for a class of fractional-order systems with the multiple time delays is given.
Consider the following linear fractional-order system with time delays
where \(0< q < 1,A=(a_{ij})_{n\times n}\), \(X(t)=(x_{1}(t), x_{2}(t) ,\ldots , x_{n}(t))^{\mathrm{T}}\), \(X(t_{\tau })=\left( \displaystyle \sum _{j=1}^{n}k_{1j}x_{j}(t-\tau _{1j}), \sum _{j=1}^{n}k_{2j}x_{j}(t-\tau _{2j}), \ldots ,\, \sum _{j=1}^{n}k_{nj}x_{j}(t-\tau _{nj})\right) ^{\mathrm{T}}.\)
Especially, if \(\tau _{ij}=\tau _{j}\), for \(i=1,2,\ldots ,n\), \(K=(k_{ij})_{n \times n}\), system (1) can be written as the following vector form:
where \(X(t-\tau )=(x_{1}(t-\tau _{1}), x_{2}(t-\tau _{2}) ,\ldots , x_{n}(t-\tau _{n}))^{\mathrm{T}}\).
Taking Laplace transform [36, 37] on both sides of (1), we have
where \(X_{i}(s)\) is the Laplace transform of \(x_{i}(t)\) with \(X_{i}(s) = L(x_{i}(t))\) and \(\phi _{i}(t) (1 \le i \le n, t\in [-\tau ,0])\) is the initial value.
(3) can be rewritten as follows:
in which
where \(\widehat{k}_{ij}=-k_{ij}\mathrm{e}^{-s\tau _{ij}}-a_{ij},i,j=1,2,\ldots ,n (i\ne j)\), \(s_{i}=s^{q}-k_{ii}\mathrm{e}^{-s\tau _{ii}}-a_{ii}\).
We call \({\varDelta }(s)\) as the characteristic matrix of system (2) and \(\mathrm{det}({\varDelta }(s))\) as the characteristic polynomial of \({\varDelta }(s)\). The stability of system (2) is completely determined by the distribution of eigenvalues of \(\mathrm{det}({\varDelta }(s))\).
If \(\tau _{ij}=0\), system (1) can be written as
where
Based on the characteristic polynomial \(\mathrm{det}({\varDelta }(s))\) and the coefficient matrix M(\(\tau _{ij}=0\)), we can obtain the following conclusions.
Theorem 1
[31] If all the roots of the characteristic equation\(\mathrm{det}({\varDelta }(s))=0\)for\(q \in (0, 1)\)have negative real parts, then the zero solution of system (1) is Lyapunov asymptotically stable.
Theorem 2
[31] If\(q \in (0, 1)\), all the eigenvalues ofMsatisfy\(| arg(\lambda _{M})|> \frac{\pi }{2}\)and the characteristic equation\(\mathrm{det}({\varDelta }(s))=0\)has no purely imaginary roots for any\(\tau _{ij}> 0, i, j = 1, \ldots , n\), then the zero solution of system (1) is Lyapunov asymptotically stable.
Lemma 1
[31] Consider the following fractional-order differential inequality with time delay
and the linear fractional-order differential system with time delay
wherev(t) andw(t) are continuous and nonnegative in\((0,+\infty )\), and\(h(t)\ge 0, t\in [-\tau , 0]\).
If\(a>0\)and\(b>0\), then\(v(t)\le w(t), \forall t\in [0,+\infty ).\)
Lemma 2
Consider the following fractional-order differential inequality with time delays
and the linear fractional-order differential system with time delays
where\(\tau =\max \{\tau _{1}, \tau _{2}, \ldots , \tau _{n}\}\), v(t) andw(t) are continuous and nonnegative in\((0,+\infty )\), and\(h(t)\ge 0,\,t\in [-\tau , 0]\).
If\(a>0\), \(b_{j}>0\)and\(\tau _{j}>0(j=1,2,\ldots ,n)\), then
Proof
According to Lemma 1 and the same method, we can get the conclusion. \(\square\)
Lemma 3
[43]. Let\(x(t) \in R\)be a continuous and derivable function. Then, for any time instant\(t > 0\),
Lemma 4
[44]. Let\(x(t) \in R\)be a continuous and piecewise smooth function, and\(x'(t)\)is piecewise continuous. Then, for any time instant\(t > 0\),
2.2 Model description
Consider the following fractional-order Hopfield neural network with time delays:
where \(q\in (0, 1)\), n is the number of units in the neural network, \(x(t)=(x_{1}(t), x_{2}(t),\ldots , x_{n}(t))^\mathrm{T}\) corresponds to the state vector at time t, \(a_{i}> 0\) is the self-regulating parameter of the neuron, \(f_{j}(x_{j}(t))\) and \(g_{j}(x_{j}(t-\tau _{j}))\) denote, respectively, the measures of response or activation to its incoming potentials of the unit j at time t and \(t-\tau _{j}\); \(b_{ij}(x_{i}(t))\) denotes the synaptic connection weight of the unit j to the unit i at time t , and \(c_{ij}(x_{i}(t))\) denotes the synaptic connection weight of the unit j to the unit i at time \(t-\tau _{j}\), \(d_{i}(t)\) is the control input vector, and
in which \(W_{ij}\) and \(M_{ij}\) denote the memductances of resistors \(R_{ij}\) and \(F_{ij}\), respectively. \(R_{ij}\) represents the resistors between the feedback function \(f_{i}(x_{i}(t))\) and \(x_{i}(t)\). \(F_{ij}\) represents the resistor between the feedback function \(g_{i}(x_{i}(t-\tau _{i})\) and \(x_{i}(t)\). According to the features of memristor and the characteristics of current–voltage, \(b_{ij}(x_{i}(t))\) and \(c_{ij}(x_{i}(t))\) are memristor-based connection weights that satisfy
for \(i,j=1,2,\ldots ,n\), where \(\hat{b}_{ij}\), \(\check{b}_{ij}\), \(\hat{c}_{ij}\), \(\check{c}_{ij}\) are constants, \(x(t)=(x_{1}(t),x_{2}(t),\ldots ,x_{n}(t))^\mathrm{T}=h(t)\),
\(t\in [-\tau , 0]\), \(\tau =\max \{\tau _{1}, \tau _{2}, \ldots , \tau _{n}\}\).
Based on the theory of differential inclusion, the memristor-based neural network (9) can be written as follows:
where \(\underline{b}_{ij}=\min \{\hat{b}_{ij},\check{b}_{ij}\}\), \(\bar{b}_{ij}=\max \{\hat{b}_{ij},\check{b}_{ij}\}\), \(\underline{c}_{ij}=\min \{\hat{c}_{ij},\check{c}_{ij}\}\), \(\bar{c}_{ij}=\max \{\hat{c}_{ij},\check{c}_{ij}\}\), \(b^{+}_{ij}=\max \{|\underline{b}_{ij}|, |\bar{b}_{ij}|\}\), \(c^{+}_{ij}=\max \{|\underline{c}_{ij}|, |\bar{c}_{ij}|\}\),
and
That is to say, there exist \(\gamma _{ij}(t)\in \mathrm{co}(\underline{b}_{ij},\bar{b}_{ij})\) and \(\sigma _{ij}(t)\in \mathrm{co}(\underline{c}_{ij},\bar{c}_{ij})\), such that
Consider the drive–response synchronization and the response system of (9) can be described as follows
Similarly, the parameters of system (12) can be also defined as
Based on the above discussion, the response system (12) can be rewritten as
where
and
Similarly, there exist \(\bar{\gamma }_{ij}(t)\in \mathrm{co}(\underline{b}_{ij},\bar{b}_{ij})\) and \(\bar{\sigma }_{ij}(t)\in \mathrm{co}(\underline{c}_{ij},\bar{c}_{ij})\), such that
Definition 4
If there exists nonzero constant \(\beta \in R\), for any two solutions of system (9) and system (12), x(t) and y(t), with initial values \(x_{0}\) and \(y_{0}\), such that
then the response system (12) is said to be globally asymptotically projective synchronized to the drive system (9), where \(||\cdot ||\) denotes the Euclidean norm, and \(\beta\) denotes the projective coefficient. Especially, the drive system (9) and the response system (12) can achieve global asymptotical complete synchronization if \(\beta =1\) and global asymptotical anti-synchronization if \(\beta =-1\).
According to the comparison theorem for a class of fractional-order systems with time delays (Lemma 4), and using feedback control, several sufficient conditions are obtained to ensure synchronization of fractional-order memristor-based neural networks with time delays. We choose the following feedback control strategy:
where \(p_{i}\), \(\epsilon _{i}\) and \(\eta _{i}\) are control gains to be determined.
Remark 1
In fact, control scheme (15) is a hybrid control, consisting of an open loop control \(v_{i}(t)\) and a time-delayed feedback control \(w_{i}(t)\). Compared with other approaches, control scheme (15) is a kind of memory feedback controller [45], which can achieve better performance than memoryless feedback controller when information on the size of time delay is available. It is also worth noting that memory feedback controllers are natural feedback controllers in the view of the infinite dimensional state space of time-delay systems.
In order to obtain the main results, the following assumptions are given.
Assumption 1 (A1)
The neuron activation functions \(f_{j}\), \(g_{j}\) are Lipschitz continuous. That is, there exist positive constants \(L_{j}\), \(K_{j}, j=1,2,\ldots ,n\), such that
Assumption 2 (A2)
For any \(x\in R\), there exist positive constants \(M_{j}\), \(N_{j}\), such that
3 Main results
In this section, we consider the synchronization of fractional-order memristor-based neural networks with time delays. Based on the stability theorem for linear fractional-order systems with time delays and the comparison theorem for a class of fractional-order systems with time delays, a simple criterion for synchronization is given. Under the delay feedback controller, we have the following theorem.
Theorem 3
Under assumptions (A1)–(A2), choose proper parameters\(p_{i}, \epsilon _{i}\)and\(\eta _{i}\), such that the following relationships hold
where\(\delta _{j}=\sum _{i=1}^{n}K_{j}c^{+}_{ij}+|\epsilon _{j}|\)and\(\lambda =\min \nolimits _{1\le i\le n}\{2(a_{i}+p_{i})- |\epsilon _{i}|-\sum\nolimits_{j=1}^{n}L_{j}b^{+}_{ij} -\sum\nolimits_{j=1}^{n}K_{j}c^{+}_{ij}-\sum _{j=1}^{n}L_{i}b^{+}_{ji}\}>0\), then the response system (12) and the drive system (9) will achieve global projective synchronization.
Proof
Assume that \(y(t)=(y_{1}(t),y_{2}(t),\ldots ,y_{n}(t))^\mathrm{T}\) is a solution of system (12), and \(x(t)=(x_{1}(t),x_{2}(t),\)\(\ldots ,x_{n}(t))^\mathrm{T}\) is a solution of system (9).
We define the error between the drive and the response systems as \(e_{i}(t)=y_{i}(t)-\beta x_{i}(t), i=1,2,\dots ,n\). From (14) and (11), the error system can be described as
where
Take \(V(t)=\sum _{i=1}^{n}\frac{1}{2}e_{i}^{2}(t).\) Calculating the fractional-order derivative of V(t) along the solution of system (16), and using Lemma 4, we can get
Using time-delayed feedback control (15), we have
From the assumptions (A1) and (A2), we have
Substituting (18) into (17) yields:
Choose \(\eta _{i}(i=1,2,\dots ,n)\), such that \(\displaystyle \eta _{i}\ge \sum _{j=1}^{n}(b^{+}_{ij}+|\beta \underline{b}_{ij}|)M_{j}+\sum _{j=1}^{n}(c^{+}_{ij}+|\beta \underline{c}_{ij}|)N_{j}\), then
Choose proper parameters \(p_{i}, \epsilon _{i}\), such that \(\displaystyle \lambda =\min \nolimits _{1\le i\le n}\{2(a_{i}+p_{i})-|\epsilon _{i}|-\sum _{j=1}^{n}L_{j}b^{+}_{ij}-\sum _{j=1}^{n}K_{j}c^{+}_{ij}-\sum _{j=1}^{n}L_{i}b^{+}_{ji}\}>0\).
Take \(\delta _{j}=\sum _{i=1}^{n}K_{j}c^{+}_{ij}+|\epsilon _{j}|\), then
Consider the following system
where \(W(t)\ge 0 (W(t)\in R)\), and take the same initial conditions with V(t).
Using Lemma 2, we have
Note that there exists a unique zero equilibrium point in system (22). In the following, we will prove that the zero solution of system (22) is globally Lyapunov asymptotically stable, i.e., \(W(t)\rightarrow 0(t\rightarrow +\infty )\).
Applying the Laplace transform on both sides of system (22) and using the similar calculating proceeding for \({\varDelta }(s)\) in Sect. 2, we can get that the characteristic equation \(\mathrm{det}({\varDelta }(s))=0\) satisfies
In the following, we will prove that \(\mathrm{det}({\varDelta }(s))=0\) has no pure imaginary roots for any \(\tau _{j} >0\) by contradiction.
Suppose there exists \(s=\omega i=|\omega |(\cos \frac{\pi }{2}+i\sin (\pm \frac{\pi }{2}))\) that is a pure imaginary root of (23), where \(\omega\) is a real number. If \(\omega >0\), \(s=\omega i=|\omega |(\cos \frac{\pi }{2}+i\sin \frac{\pi }{2})\), and if \(\omega <0\), \(s=\omega i=|\omega |(\cos \frac{\pi }{2}-i\sin \frac{\pi }{2})\). Substituting \(s=\omega i=|\omega |(\cos \frac{\pi }{2}+i\sin (\pm \frac{\pi }{2}))\) into (23) yields
In Eq. (24), separating real and imaginary parts yields
and
From these two equations, we have
Consider
Obviously, when \(0 < q \le 1\) and \(\sum _{j=1}^{n}\delta _{j}<\lambda \sin \frac{q \pi }{2}\), Eq. (25) has no real solutions, i.e., \(\mathrm{det}({\varDelta }(s))=0\) has no pure imaginary roots for any \(\tau _{j} >0\). When \(\tau _{j}=0\), we obtain
then \(\sum _{j=1}^{n}\delta _{j}<\lambda ,\, 0 < q \le 1\). According to Theorem 2, the zero solution of system (22) is globally Lyapunov asymptotically stable, i.e., \(W(t)\rightarrow 0(t\rightarrow +\infty )\).
Based on Lemma 2, we can get \(0<V(t)\le W(t)\). Then V(t) is globally Lyapunov asymptotically stable, i.e., \(V(t)\rightarrow 0(t\rightarrow +\infty )\). As \(V(t)=\sum _{i=1}^{n}\frac{1}{2}\mathrm{e}^{2}_{i}(t)\rightarrow 0\), then \(e_{i}(t)\rightarrow 0\), which means that the drive system (9) and response system (12) can achieve global asymptotical projective synchronization based on the controller (15). That completes the proof \(\square\)
Remark 2
Theorem 3 shows that the realization of projective synchronization depends on the design of controller (15), i.e., the selection of control gains \(p_{i}\), \(\epsilon _{i}\) and \(\eta _{i}\). For a given drive system, \(\eta _{i}\) is easily determined. In addition, we can choose proper \(|\epsilon _{i}|\) as small as possible and proper \(p_{i}\) as large as possible to make sure that the required relationships hold. Though the condition in Theorem 3 is complex in form, it is actually easy to implement.
Remark 3
If \(\beta =1\), the controller (15) is reduced to
Under assumptions (A1)–(A2), we can choose
and proper parameters \(p_{i}\), \(\epsilon _{i}\), \(\eta _{i}\), such that the following relationships hold
where \(\delta _{j}=\sum _{i=1}^{n}K_{j}c^{+}_{ij}+|\epsilon _{j}|\) and \(\lambda =\min \nolimits _{1\le i\le n}\{2(a_{i}+p_{i}) -|\epsilon _{i}|-\sum _{j=1}^{n}L_{j}b^{+}_{ij} -\sum _{j=1}^{n}K_{j}c^{+}_{ij}-\sum _{j=1}^{n}L_{i}b^{+}_{ji}\}>0\), then the drive system (9) and response system (12) can achieve global asymptotical complete synchronization.
Remark 4
If \(\beta =-1\), the controller (15) becomes
Under assumptions (A1)–(A2), choose proper parameters \(p_{i}\), \(\epsilon _{i}\) and \(\eta _{i}\), such that the following relationships hold
where \(\delta _{j}=\sum _{i=1}^{n}K_{j}c^{+}_{ij}+|\epsilon _{j}|\) and \(\lambda =\min \nolimits _{1\le i\le n}\{2(a_{i}+p_{i}) -|\epsilon _{i}|-\sum _{j=1}^{n}L_{j}b^{+}_{ij} -\sum _{j=1}^{n}K_{j}c^{+}_{ij}-\sum _{j=1}^{n}L_{i}b^{+}_{ji}\}>0\), then the drive system (9) and response system (12) can achieve global asymptotical anti-synchronization.
Remark 5
If \(\beta =0\), the controller (15) is degenerated to
Under assumptions (A1)–(A2), choose proper parameters \(p_{i}\), \(\epsilon _{i}\) and \(\eta _{i}\), such that the following relationships hold
where \(\delta _{j}=\sum _{i=1}^{n}K_{j}c^{+}_{ij}+|\epsilon _{j}|\) and \(\lambda =\min \nolimits _{1\le i\le n}\{2(a_{i}+p_{i}) -|\epsilon _{i}|-\sum _{j=1}^{n}L_{j}b^{+}_{ij} -\sum _{j=1}^{n}K_{j}c^{+}_{ij}-\sum _{j=1}^{n}L_{i}b^{+}_{ji}\}>0\), then system (12) is globally asymptotically stabilized to the origin under the control scheme.
If the parameter \(p_{i}=0\), the time-delayed feedback controller (15) becomes
where \(\epsilon _{i}\) and \(\eta _{i}\) are control gains to be determined. Using the time-delayed feedback controller (27), we can obtain the following corollary:
Corollary 1
Under assumptions (A1)–(A2), choose proper parameters\(\epsilon _{i}\)and\(\eta _{i}\), such that the following relationships hold,
where\(\delta _{j}=\sum _{i=1}^{n}K_{j}c^{+}_{ij}+|\epsilon _{j}|\)and\(\lambda =\min \nolimits _{1\le i\le n}\{2a_{i}-|\epsilon _{i}| -\sum _{j=1}^{n}L_{j}b^{+}_{ij} -\sum _{j=1}^{n}K_{j}c^{+}_{ij}-\sum _{j=1}^{n}L_{i}b^{+}_{ji}\}>0\), then the response system (12) will globally projective synchronize with the drive system (9) under controller (27).
If the parameter \(\epsilon _{i}=0\), the time-delayed feedback controller (15) becomes
where \(p_{i}\) and \(\eta _{i}\) are control gains to be determined. Using the feedback controller (28), we can obtain the following corollary:
Corollary 2
Under assumptions (A1)–(A2), choose proper parameters\(p_{i}\)and\(\eta _{i}\), such that the following relationships hold,
where\(\delta _{j}=\sum _{i=1}^{n}K_{j}c^{+}_{ij}\)and\(\lambda =\min \nolimits _{1\le i\le n}\{2(a_{i}+p_{i}) -\sum _{j=1}^{n}L_{j}b^{+}_{ij}-\sum _{j=1}^{n}K_{j}c^{+}_{ij}-\sum _{j=1}^{n}L_{i}b^{+}_{ji}\}>0\), then the response system (12) will globally projective synchronize with the drive system (9) under controller (28).
Remark 6
In this paper, a fractional time-delayed feedback control is introduced to realize projective synchronization. Note that the synchronization conditions contain the fractional order q, and hence, the synchronization of fractional neural network with time delays is influenced by the order of fractional system.
Remark 7
Note that in some previous work on the synchronization of neural networks and fractional-order neural networks [4,5,6,7,8, 35], authors investigated the synchronization or anti-synchronization control of memristor-based neural networks under the following basic assumption:
Under this assumption, the conditions of Theorem 3 become simple, which only need
4 Simulation
In this section, a numerical simulation is given by MATLAB to illustrate the theoretical results of the paper. In addition, to solve the fractional-order differential equations with time delays, step-length \(h=0.01\) is taken in the Adams–Bashforth–Moulton predictor–corrector scheme.
A fractional-order Hopfield neural network of three neurons with time delays is given as follows
The parameters in system (29) are chosen as \(q=0.96\), \(\tau _{1}=1\), \(\tau _{2}=2\), \(\tau _{3}=3\), \(d_{1}(t)=0.2\sin (t)\), \(d_{2}(t)=0.3\cos (t)\), \(d_{3}(t)=0.1\cos (t)\), \(a_{1}=a_{2}=a_{3}=1\), \(b_{11}(x_{1})=\left\{ \begin{array}{ll} 3.1, &{} |x_{1}|<1\\ 3, &{} |x_{1}|>1 \end{array}\right.,\)\(b_{12}(x_{1})=\left\{ \begin{array}{ll} 0.09, &{} |x_{1}|<1\\ 1, &{} |x_{1}|>1 \end{array}\right.,\)\(b_{13}(x_{1})=\left\{ \begin{array}{l} -3, |x_{1}|<1\\ -4, |x_{1}|>1 \end{array}\right.,\)\(b_{21}(x_{2})=\left\{ \begin{array}{l} 1, \quad |x_{2}|<1\\ 0.09, |x_{2}|>1 \end{array}\right.,\)\(b_{22}(x_{2})=\left\{ \begin{array}{l} 2.0, \quad |x_{2}|<1\\ 2.1+\frac{\pi }{4}, |x_{2}|>1 \end{array}\right.,\)\(b_{23}(x_{2})=\left\{ \begin{array}{l} -1, |x_{2}|<1\\ -6, |x_{2}|>1 \end{array}\right.,\)\(b_{31}(x_{3})=\left\{ \begin{array}{l} 3, |x_{3}|<1\\ 6, |x_{3}|>1 \end{array}\right.,\)\(b_{32}(x_{3})=\left\{ \begin{array}{l} -1, \,\,|x_{3}|<1\\ -1.8, |x_{3}|>1 \end{array}\right.,\)\(b_{33}(x_{3})=\left\{ \begin{array}{l} -2, |x_{3}|<1\\ -1, |x_{3}|>1 \end{array}\right.,\)\(c_{11}(x_{1})=\left\{ \begin{array}{l} -2.4, |x_{1}|<1\\ -2.5, |x_{1}|>1 \end{array}\right.,\)\(c_{12}(x_{1})=\left\{ \begin{array}{l} 0.1, |x_{1}|<1\\ 0.2, |x_{1}|>1 \end{array}\right.,\)\(c_{13}(x_{1})=\left\{ \begin{array}{l} 0.8, |x_{1}|<1\\ 0.9, |x_{1}|>1 \end{array}\right.,\)\(c_{21}(x_{2})=\left\{ \begin{array}{l} -1.9, |x_{2}|<1\\ -1.5, |x_{2}|>1 \end{array}\right.,\)\(c_{22}(x_{2})=\left\{ \begin{array}{l} -1.6, |x_{2}|<1\\ -1.7, |x_{2}|>1 \end{array}\right.,\)\(c_{23}(x_{2})=\left\{ \begin{array}{l} 0.1, |x_{2}|<1\\ 0.3, |x_{2}(t|>1 \end{array}\right.,\)\(c_{31}(x_{3})=\left\{ \begin{array}{l} -2.2, |x_{3}|<1\\ -2.1, |x_{3}|>1 \end{array}\right.,\)\(c_{32}(x_{3})=\left\{ \begin{array}{l} 4, |x_{3}|<1\\ 3, |x_{3}|>1 \end{array}\right.,\)\(c_{33}(x_{3})=\left\{ \begin{array}{ll} -1, &{} |x_{3}(t)|<1\\ -1.5, &{} |x_{3}(t)|>1 \end{array}\right..\)
The Lipschitz constants are chosen as \(K_{j}=L_{j}=1(j=1,2,3)\). According to system (29), we can obtain \(M_{j}=N_{j}=1(j=1,2,3)\).

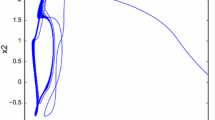
Chaotic attractor of system (29)
The initial values of \(x_{1}(t)\), \(x_{2}(t)\) and \(x_{3}(t)\) are chosen as \(x_{1}(t)=1.5 \times \widetilde{h}_{1}(t)\), \(x_{2}(t)=-\widetilde{h}_{2}(t)\) and \(x_{3}(t)=\widetilde{h}_{3}(t)\), \(t\in [-\tau ,0]\), where \(\widetilde{h}_{1,2,3}(t)\) are chosen as periodic functions, that are \(\widetilde{h}_{1}(t)=\cos (t)\), \(\widetilde{h}_{2}(t)=-\sin (t)\) and \(\widetilde{h}_{3}(t)=1.3\sin (3t)\). Furthermore, the other initial values of \(y_{1}(t)\), \(y_{2}(t)\) and \(y_{3}(t)\) are chosen as \(y_{1}(t)=\widehat{h}_{1}(t)\), \(y_{2}(t)=\widehat{h}_{2}(t)\), and \(y_{3}(t)=1.5 \times \widehat{h}_{3}(t)\), \(t\in [-\tau ,0]\), where \(\widehat{h}_{1}(t)=\sin (t)\), \(\widehat{h}_{2}(t)=\cos (t)\) and \(\widehat{h}_{3}(t)=\cos (0.5t)\). Under the above parameters in the neural network system, the max Lyapunov exponents \(L_\mathrm{max}=0.0339>0\). The system (29) has a chaotic attractor shown in Fig. 1.

State trajectories of x(t), y(t) with \(\beta =2\). a State trajectories of \(x_{1}(t)(y_{1}(t))\). b State trajectories of \(x_{2}(t)(y_{2}(t))\). c State trajectories of \(x_{3}(t)(y_{3}(t))\)

The synchronization errors between the drive system and the response system in (29) with \(\beta =2\). a Synchronization error \(e_{1}(t)\). b Synchronization error \(e_{2}(t)\). c Synchronization error \(e_{3}(t)\)

Trajectories of connection weight coefficient \(b_{11}\) with \(\beta =2\). a Trajectories of connection weight coefficient \(b_{11}(x_{1}(t))\). b Trajectories of connection weight coefficient \(b_{11}(y_{1}(t))\)

State trajectories of x(t), y(t) with \(\beta =1\). a The convergent behaviors of \(x_{1}(t)(y_{1}(t))\). b The convergent behaviors of \(x_{2}(t)(y_{2}(t))\). c The convergent behaviors of \(x_{3}(t)(y_{3}(t))\)

The synchronization errors between the drive system and the response system in (29) with \(\beta =1\). a Synchronization error \(e_{1}(t)\). b Synchronization error \(e_{2}(t)\). c Synchronization error \(e_{3}(t)\)

Trajectories of connection weight coefficient \(b_{11}\) with \(\beta =1\). a Trajectory of connection weight coefficient \(b_{11}(x_{1}(t))\). b Trajectory of connection weight coefficient \(b_{11}(y_{1}(t))\)

State trajectories of x(t), y(t) with \(\beta =-1\). a The convergent behaviors of \(x_{1}(t)(y_{1}(t))\). b The convergent behaviors of \(x_{2}(t)(y_{2}(t))\). c The convergent behaviors of \(x_{3}(t)(y_{3}(t))\)

The synchronization errors between the drive system and the response system in (29) with \(\beta =-1\). a Synchronization error \(e_{1}(t)\). b Synchronization error \(e_{2}(t)\). c Synchronization error \(e_{3}(t)\)

Trajectories of connection weight coefficient \(b_{11}\) with \(\beta =-1\). a Trajectory of connection weight coefficient \(b_{11}(x_{1}(t))\). b Trajectory of connection weight coefficient \(b_{11}(y_{1}(t))\)
The projective synchronization with projective coefficient \(\beta = 2\) is considered. Parameters \(p_{i},\epsilon _{i},\eta _{i}\) in controller (15) are chosen as \(p_{1}=14.6\), \(p_{2}=20\), \(p_{3}=26\), \(\eta _{1}=14.6\), \(\eta _{2}=20\), \(\eta _{3}=23.4\), \(\epsilon _{i}=1(i=1,2,3)\). According to system (29), we can obtain \(\sum _{j=1}^{3}\delta _{j}=18.7\). It is easy to verify that these values satisfy the conditions of Theorem 3. The drive–response systems (9) and (12) can achieve global asymptotical projective synchronization with projective coefficient \(\beta = 2\), which is demonstrated in Figs. 2, 3. The connection weight coefficients \(b_{11}(x_{1}(t))\) and \(b_{11}(y_{1}(t))\) with projective coefficient \(\beta = 2\) are shown in Fig. 4.
The global asymptotical complete synchronization with projective coefficient \(\beta = 1\) is considered. Parameters \(p_{i}\), \(\epsilon _{i}\), \(\eta _{i}\) in controller (15) are chosen as \(p_{1}=14.6\), \(p_{2}=20\), \(p_{3}=26\), \(\eta _{1}=6.4\), \(\eta _{2}=2.31\), \(\eta _{3}=6.17\), \(\epsilon _{i}=1(i=1,2,3)\). According to system (29), we can obtain \(\sum _{j=1}^{3}\delta _{j}=18.7\). It is easy to verify that these values satisfy the conditions of Theorem 3. The drive–response systems (9) and (12) can achieve global asymptotical complete synchronization, which is demonstrated in Figs. 5, 6. The connection weight coefficients \(b_{11}(x_{1}(t))\) and \(b_{11}(y_{1}(t))\) with \(\beta = 1\) are shown in Fig. 7.
The global asymptotical anti-synchronization with projective coefficient \(\beta = -1\) is considered. Parameters \(p_{i}\), \(\epsilon _{i}\), \(\eta _{i}\) in controller (15) are chosen as \(p_{1}=14.6\), \(p_{2}=20\), \(p_{3}=26\), \(\eta _{1}=10.29\), \(\eta _{2}=11.09\), \(\eta _{3}=12.4\), \(\epsilon _{i}=1(i=1,2,3)\). According to system (29), we can obtain \(\sum _{j=1}^{3}\delta _{j}=18.7\). It is easy to verify that these values satisfy the conditions of Theorem 3. The drive–response systems (9) and (12) can achieve global asymptotical anti-synchronization, which is demonstrated in Figs. 8, 9. The connection weight coefficients \(b_{11}(x_{1}(t))\) and \(b_{11}(y_{1}(t))\) with \(\beta =-1\) are shown in Fig. 10.
5 Conclusion
In this paper, the global projective synchronization for fractional-order memristor-based neural networks with multiple time delays has been investigated via combining open loop control with the time-delayed feedback control. A comparison theorem for a class of fractional-order systems with multiple time delays has been proposed. Based on the given comparison theorem and Lyapunov method, the synchronization conditions have been derived under the framework of Filippov solution and differential inclusion theory. Several feedback control strategies have been given to ensure the realization of complete synchronization, anti-synchronization and the stabilization for the fractional-order memristor-based neural networks with time delays.
References
Chua L (1971) Memristor-the missing circuit element. IEEE Trans Circuit Theory 18(5):507–519
Strukov D, Snider G, Stewart D, Williams R (2008) The missing memristor found. Nature 453(7191):80–83
Anthes G (2011) Memristors: pass or fail ? Commun ACM 54:22–24
Wu A, Zeng Z (2012) Exponential stabilization of memristive neural networks with time delays. IEEE Trans Neural Netw Learn Syst 23(12):1919–1929
Zeng Z, Wang J (2008) Design and analysis of high-capacity associative memories based on a class of discrete-time recurrent neural networks. IEEE Trans Syst Man Cybern Part B: Cybern 38(6):1525–1536
Zeng Z, Wang J (2009) Associative memories based on continuous-time cellular neural networks designed using space-invariant cloning templates. Neural Netw 22:651–657
Zeng Z, Wang J, Liao X (2004) Stability analysis of delayed cellular neural networks described using cloning templates. IEEE Trans Circuits Syst I: Regul Pap 51(11):2313–2324
Zhang G, Shen Y, Quan Y, Sun J (2013) Global exponential periodicity and stability of a class of memristor-based recurrent neural networks with multiple delays. Inf Sci 232:386–396
Yang X, Cao J, Yu W (2014) Exponential synchronization of memristive Cohen–Grossberg neural networks with mixed delays. Cogn Neurodyn 8:239–249
Li N, Cao J (2015) New synchronization criteria for memristor-based networks: adaptive control and feedback control schemes. Neural Netw 61:1–9
Pecora L, Carroll T (1990) Synchronization in chaotic systems. Phys Rev Lett 64(8):821–824
Bao H, Park JH, Cao J (2016) Exponential synchronization of coupled stochastic memristor-based neural networks with time-varying probabilistic delay coupling and impulsive delay. IEEE Trans Neural Netw Learn Syst 27(1):190–201
Mainieri R, Rehacek J (1999) Projective synchronization in three-dimensional chaotic systems. Phys Rev Lett 82(15):3024–3045
Chee C, Xu D (2006) Chaos-based M-ary digital communication technique using controller projective synchronization. IEE Proc Circuits Dev Syst 153(4):357–360
Wang S, Yu Y, Diao M (2010) Hybrid projective synchronization of chaotic fractional order systems with different dimensions. Phys A 389(21):4981–4988
Wang S, Yu Y, Wen G (2014) Hybrid projective synchronization of time-delayed fractional order chaotic systems. Nonlinear Anal: Hybrid Syst 11:129–138
Peng G, Jiang Y, Chen F (2008) Generalized projective synchronization of fractional order chaotic systems. Phys A 387(14):3738–3746
Zhou P, Zhu W (2011) Function projective synchronization for fractional-order chaotic systems. Nonlinear Anal-Real 12(2):811–816
Chen L, Chai Y, Wu R (2011) Lag projective synchronization in fractional-order chaotic (hyperchaotic) systems. Phys Lett A 375(21):2099–2110
Park JH (2008) Adaptive control for modified projective synchronization of a four-dimensional chaotic system with uncertain parameters. J Comput Appl Math 213(1):288–293
Park JH (2007) Adaptive modified projective synchronization of a unified chaotic system with an uncertain parameter. Chaos, Solitons, Fractals 34(5):1552–1559
Lundstrom B, Higgs M, Spain W, Fairhall A (2008) Fractional differentiation by neocortical pyramidal neurons. Nat Neurosci 11(11):1335–1342
Kaslik E, Sivasundaram S (2011) Dynamics of fractional-order neural networks. In: Proceedings of the international conference on neural networks. California, USA, IEEE, p 611–618
Kaslik E, Sivasundaram S (2012) Nonlinear dynamics and chaos in fractional-order neural networks. Neural Netw 32:245–256
Yu J, Hu C, Jiang H (2012) \(\alpha\)-stability and \(\alpha\)-synchronization for fractional-order neural networks. Neural Netw 35:82–87
Song C, Cao J (2014) Dynamics in fractional-order neural networks. Neurocomputing 142:494–498
Zhang S, Yu Y, Wang H (2015) Mittag-Leffler stability of fractional-order Hopfield neural networks. Nonlinear Anal: Hybrid Syst 16:104–121
Chen L, Chai Y, Wu R, Ma T, Zhai H (2013) Dynamic analysis of a class of fractional-order neural networks with delay. Neurocomputing 111(2):190–194
Wang H, Yu Y, Wen G, Zhang S (2015) Stability analysis of fractional-order neural networks with time delay. Neural Process Lett 42(2):479–500
Wang H, Yu Y, Wen G (2014) Stability analysis of fractional-order Hopfield neural networks with time delays. Neural Netw 55:98–109
Wang H, Yu Y, Wen G, Zhang S (2015) Global stability analysis of fractional-order Hopfield neural networks with time delay. Neurocomputing 154:15–23
Bao H, Park JH, Cao J (2015) Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn 82(3):1343–1354
Yu J, Hu C, Jiang H (2014) Projective synchronization for fractional neural networks. Neural Netw 49:87–95
Chen J, Zeng Z, Jiang P (2014) Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw 51:1–8
Bao H, Cao J (2015) Projective synchronization of fractional-order memristor-based neural networks. Neural Netw 63:1–9
Podlubny I (1999) Fractional differential equations. Academic Press, San Diego
Kilbas A, Srivastava H, Trujillo J (2006) Theory and applications of fractional differential equations. Elsevier, New York
Lakshmikantham V, Leela S, Devi J (2009) Theory of fractional dynamic systems. Cambridge Scientific Publishers, Cambridge
Li C, Deng W (2007) Remarks on fractional derivatives. App Math Comput 187:777–784
Bhalekar S, Gejji V (2011) A predictor–corrector scheme for solving nonlinear delay differential equations of fractional order. Fract Calc Appl Anal 1(5):1–9
Aubin J, Frankowska H (1990) Set-valued analysis. Birkhäauser, Boston
Filippov A (1988) Differential equations with discontinuous right-hand side. Kluwer Academic Publishers, Dordrecht
Aguila-Camacho N, Duarte-Mermoud M, Gallegos J (2014) Lyapunov functions for fractional order systems. Commun Nonlinear Sci Numer Simul 19:2951–2957
Gu Y, Yu Y, Wang H (2016) Synchronization for fractional-order time-delayed memristor-based neural networks with parameter uncertainty. J Franklin Inst 353:3657–3684
Zhao J, Wang J, Park JH, Shen H (2015) Memory feedback controller design for stochastic Markov jump distributed delay systems with input saturation and partially known transition rates. Nonlinear Anal Hybrid Syst 15:52–62
Acknowledgements
This work is supported by the National Natural Science Foundation of China under Grant (No. 11371049 and No. 61772063) and the Fundamental Research Funds for the Central Universities under Grant No. 2017YJS194.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Gu, Y., Yu, Y. & Wang, H. Projective synchronization for fractional-order memristor-based neural networks with time delays. Neural Comput & Applic 31, 6039–6054 (2019). https://doi.org/10.1007/s00521-018-3391-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-018-3391-7